|
2969| 1
|
[K10项目分享] 行空板K10制作太空站在哪里看板 |

|
本帖最后由 topdog 于 2026-4-14 20:26 编辑 行空板K10制作太空站在哪里看板 一、项目概述 1.1 项目背景 国际空间站(International Space Station,简称ISS)是目前在轨运行的最大人造天体,以约7.66公里/秒的速度环绕地球飞行,轨道倾角51.6446°,轨道周期约92.68分钟。由于其高速运动特性,地面观测者能够看到ISS过境的时间窗口通常只有几分钟,因此实时追踪ISS的位置信息对于天文爱好者、科普教育以及航天爱好者具有重要意义。 本项目参考《The MagPi》杂志第96期介绍的树莓派ISS追踪项目,针对行空板K10(国产ESP32-S3教育开发板)进行了完整的移植与功能增强,实现了ISS实时位置显示、轨道预测、宇航员名单查询等功能,并针对嵌入式平台进行了深度优化。 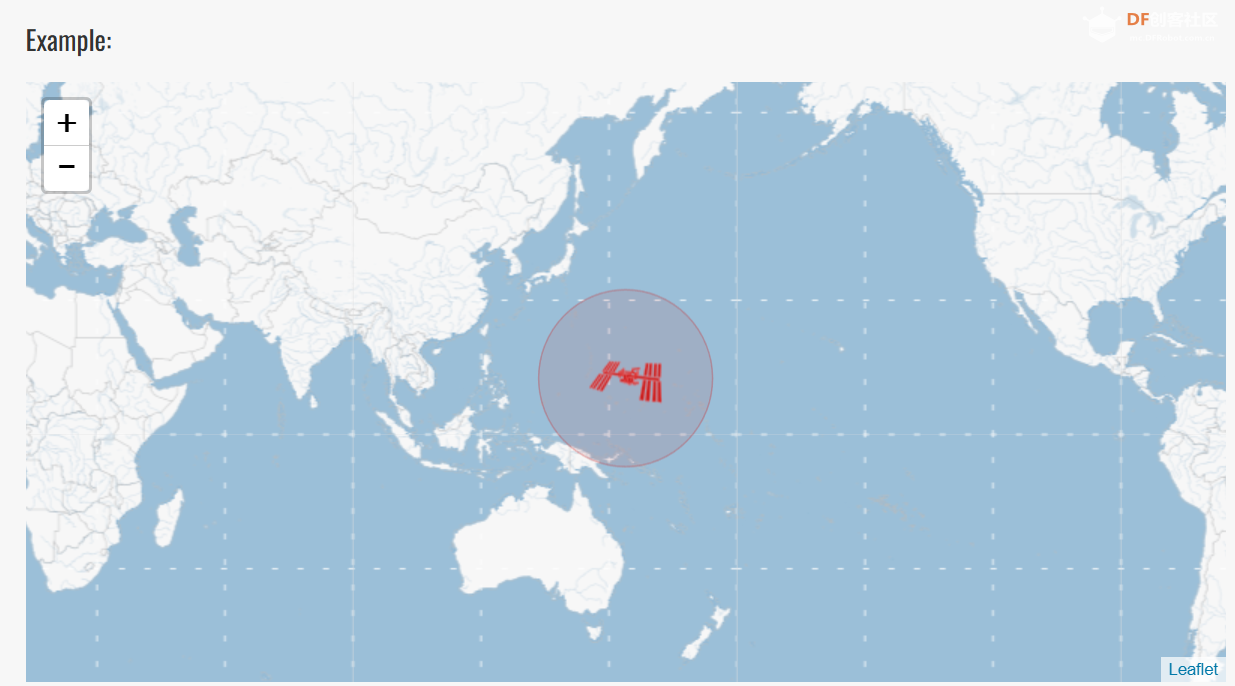 行空板K10核心参数: 处理器:ESP32-S3双核Xtensa LX7 @240MHz 显示屏:2.8英寸TFT LCD,320×240分辨率,ILI9341驱动 内存:512KB SRAM + 8MB PSRAM 无线:Wi-Fi 4 + Bluetooth 5 IO扩展:XL9535 I2C GPIO扩展器 1.3 功能特性 本系统实现了以下核心功能:
2.1 软件架构 系统采用FreeRTOS实时操作系统进行多任务调度,将功能解耦为三个独立任务: 多任务设计的优势: 解耦响应:网络请求(可能阻塞)与界面渲染(需要流畅)分离 优先级调度:按键响应优先级高于数据获取,确保交互即时 双核并行:显示任务独占Core 1,避免与数据任务竞争CPU资源 互斥保护:使用xSemaphoreCreateMutex()保护共享数据结构 2.2 数据流设计数据流从API获取任务流向显示任务,通过互斥锁保护的共享数据结构进行传递。每10秒轮询一次API数据,显示任务以100ms周期刷新界面。 三、核心技术实现 3.1 硬件驱动层 3.1.1XL9535 GPIO扩展器驱动 行空板K10使用XL9535 I2C GPIO扩展器管理背光、按键、功放等外设。本项目实现了完整的驱动类,包括pinMode()、digitalWrite()、digitalRead()三个核心方法。 关键引脚映射: P0:LCD背光控制 P14:按键A(上一页) P2:按键B(下一页) P17:功放使能(本项目中关闭以节省功耗) 3.1.2LovyanGFX显示驱动 采用LovyanGFX高性能图形库,相比Adafruit_GFX具有DMA传输、Sprite缓冲、中文字体支持等优势。SPI总线配置为40MHz,支持DMA通道自动分配。 3.2 轨道预测算法这是本项目最具技术亮点的部分。传统ISS追踪器仅显示当前位置,本系统实现了基于轨道力学的轨迹预测。 ISS轨道参数: 轨道倾角:i = 51.6446° 轨道周期:T = 92.68分钟 角速度:ω = 360°/T ≈ 3.883°/分钟 地球自转:ω_E = 0.25°/分钟 轨道预测公式: 纬度: lat = arcsin(sin(i) × sin(u)) 经度偏移: Δλ = arctan(cos(i) × sin(u) / cos(u)) 关键优化: 日期变更线处理:避免在±180°经度处画出穿越屏幕的直线 升降段判断:通过连续两个位置点的纬度变化确定轨道方向 过去轨迹:灰色显示约40%周期(约37分钟)的历史轨迹 3.3 图像资源处理
系统设计了四个功能页面,通过按键A/B切换: 页面1:地图页(PAGE_MAP) 地球背景图(蓝色弹珠) ISS当前位置图标 预测飞行轨迹(青色=未来,灰色=历史) 实时经纬度显示、升降段状态指示(ASC/DESC)  页面2:宇航员页(PAGE_ASTROS) 当前在轨宇航员名单,双列布局,最多显示12人 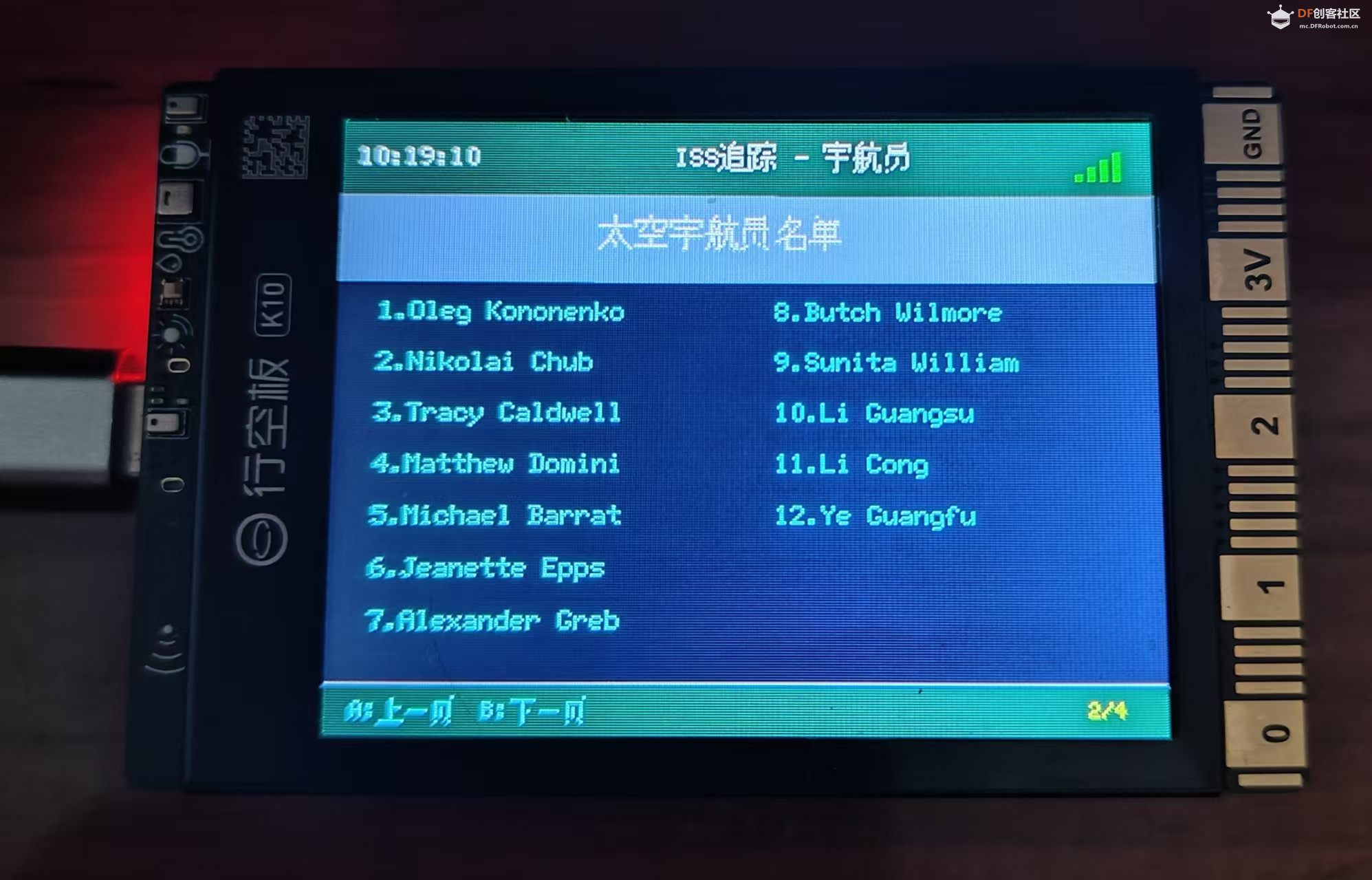 页面3:详情页(PAGE_DETAILS) ISS精确坐标(4位小数)、轨道高度、飞行速度、数据更新时间戳 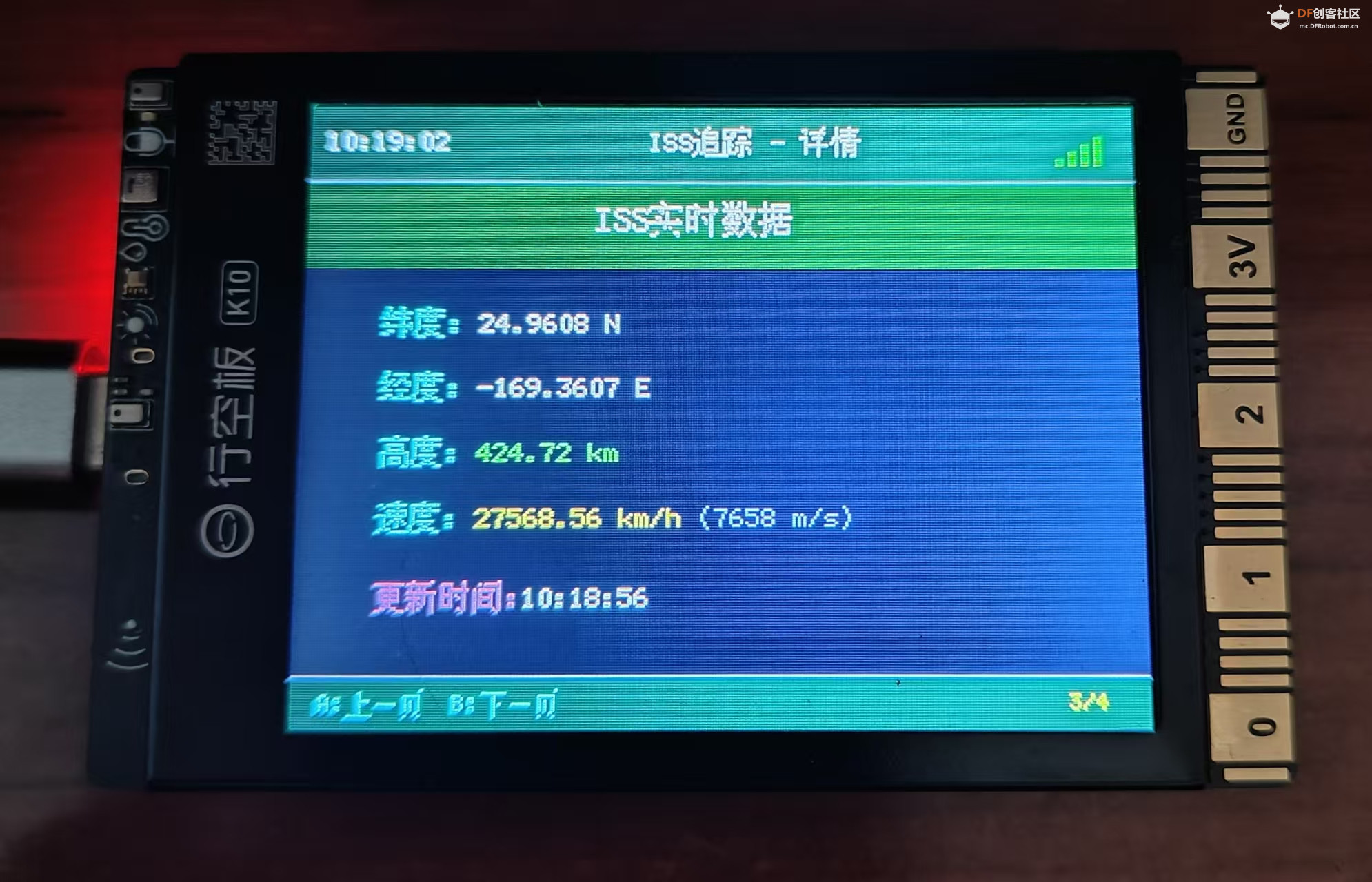 页面4:统计页(PAGE_STATS) 轨迹记录点数、WiFi信号强度、数据有效性状态 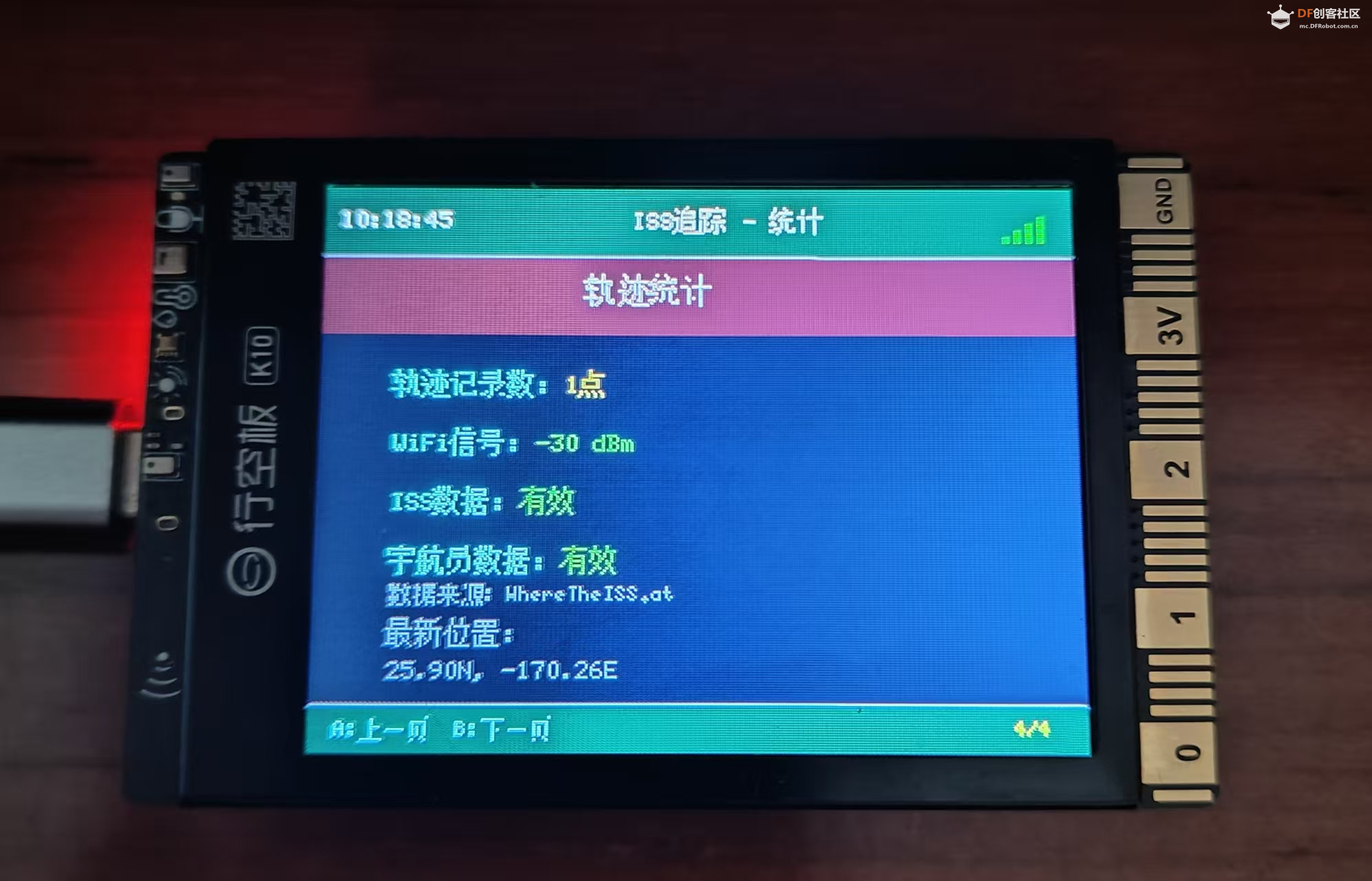 4.1 API接口说明 WhereTheISS.atAPI(主要数据源): 响应字段:latitude, longitude, altitude,velocity, visibility, timestamp Open-NotifyAstros API(宇航员数据): 响应字段:number, people[{name, craft}] 4.2 HTTPS支持ESP32-S3原生支持HTTPS,但需要注意证书验证默认关闭以节省资源。超时设置:15秒(ISSAPI)、5秒(Astros API)。 4.3 错误处理与重定向代码实现了HTTP 301/302重定向处理,当API返回重定向响应时自动跟随新的Location地址。 五、性能优化策略 5.1 内存优化
采用Sprite离屏渲染:先绘制地球背景、轨迹线、ISS图标到缓冲区,最后一次性推送屏幕。优势包括避免屏幕闪烁、提高帧率(地图页约10fps)、减少SPI传输次数。 5.3 电源管理通过关闭功放降低功耗,P17引脚设置为低电平。 6.1 开发环境 Arduino IDE 2.x 或 PlatformIO ESP32 Board Package: 3.0.x 依赖库:LovyanGFX (^1.1.x)、ArduinoJson(^7.0.0) 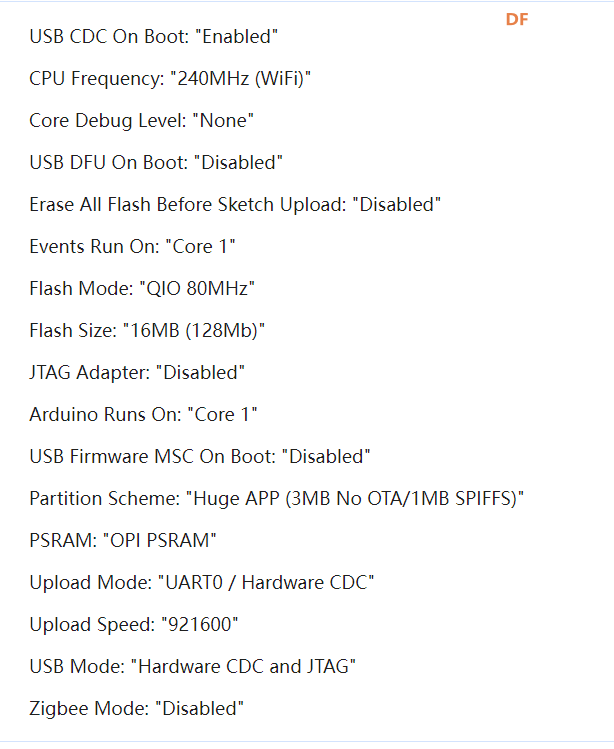 6.3 部署步骤 1. 连接行空板K10至电脑USB口 2. 选择开发板:ESP32S3 Dev Module 3. 配置PSRAM:OPI PSRAM 4. 上传代码 5. 修改WiFi SSID和密码 6. 重启设备 七、总结与展望 7.1 项目成果 项目开源分享地址:https://gitee.com/pdtopdog/k10_-space-station-tracker 看板上显示的位置可以到 http://open-notify.org/Open-Notify-API/ 验证 本项目成功实现了基于行空板K10的ISS实时追踪看板,具有以下特色: 轨道预测功能:超越传统追踪器的静态显示,实现了基于轨道力学的轨迹预测 多页面UI设计:信息分类清晰,操作简便 深度嵌入式优化:FreeRTOS多任务、Sprite缓冲、内存管理 国产教育平台:展示了国产硬件平台的潜力和可扩展性 7.2 改进方向
主程序结构(1040行):
7. WhereTheISS.at API文档:https://api.wheretheiss.at/v1/docs 8. Open-Notify API:http://open-notify.org/Open-Notify-API/ 9. LovyanGFX库:https://github.com/lovyan03/LovyanGFX 10. The MagPi #96: ISS Tracker项目 11. ISS轨道参数:https://spotthestation.nasa.gov/ |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






