本帖最后由 云天 于 2023-9-17 21:28 编辑
【项目背景】
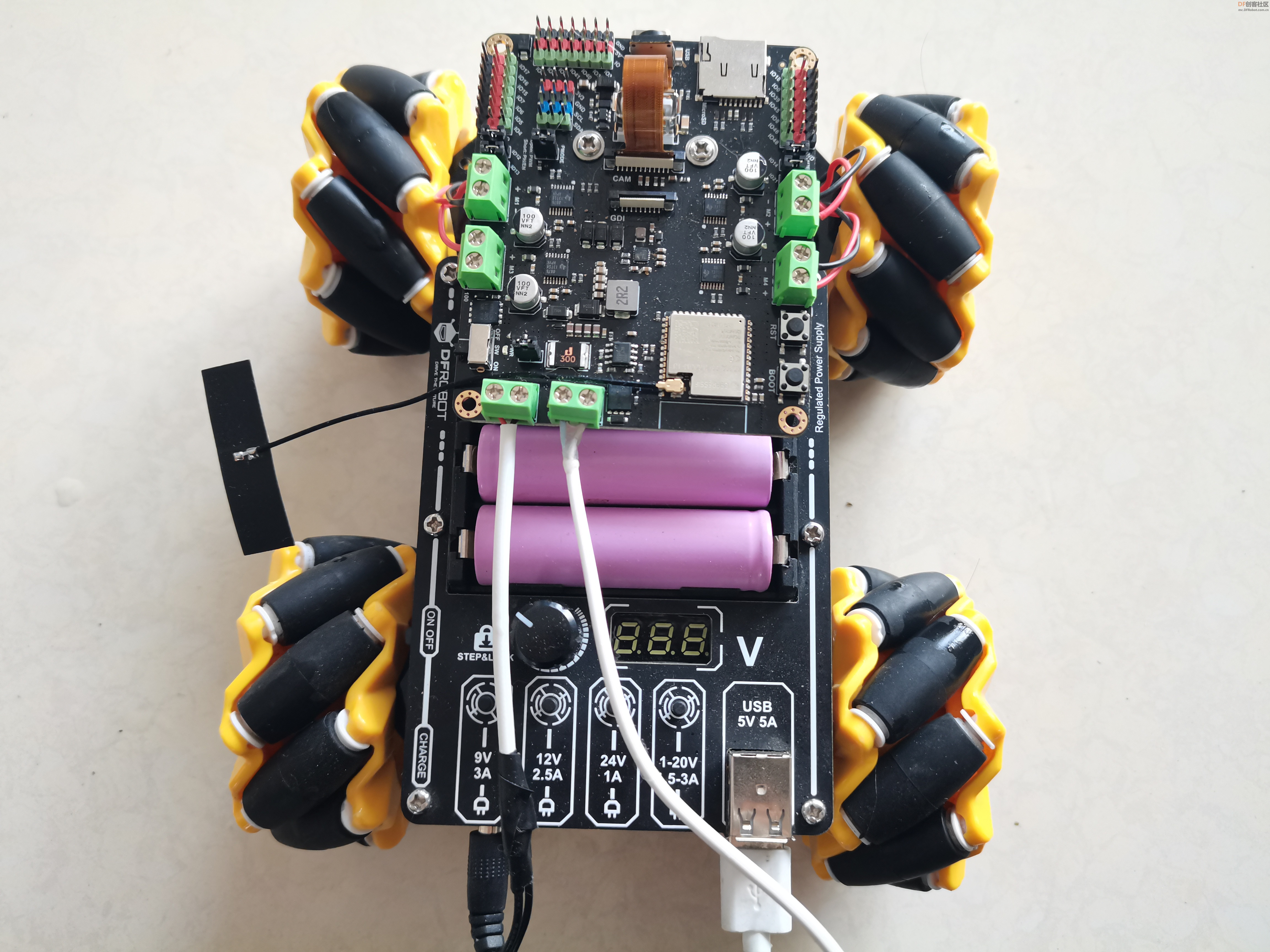
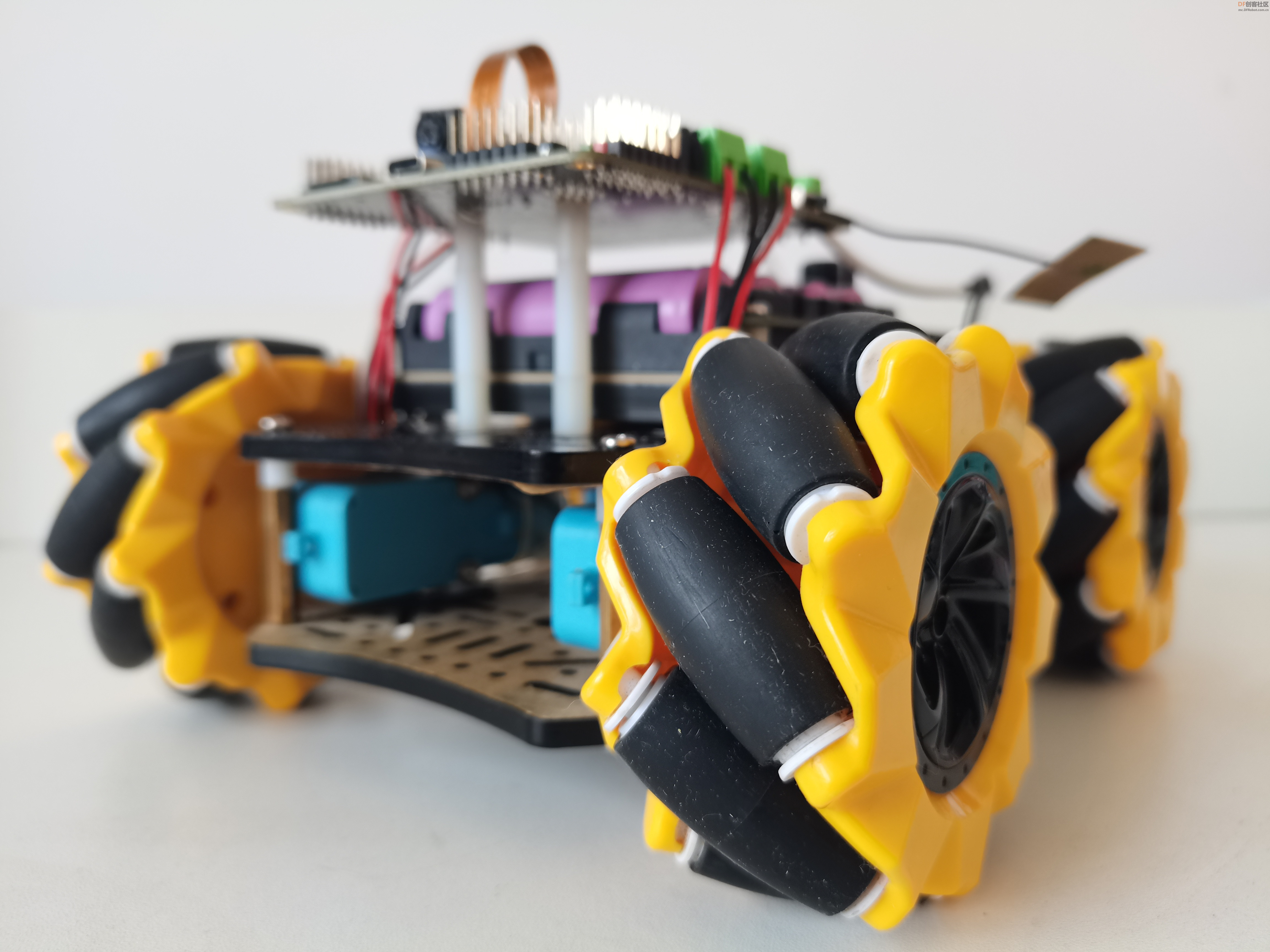
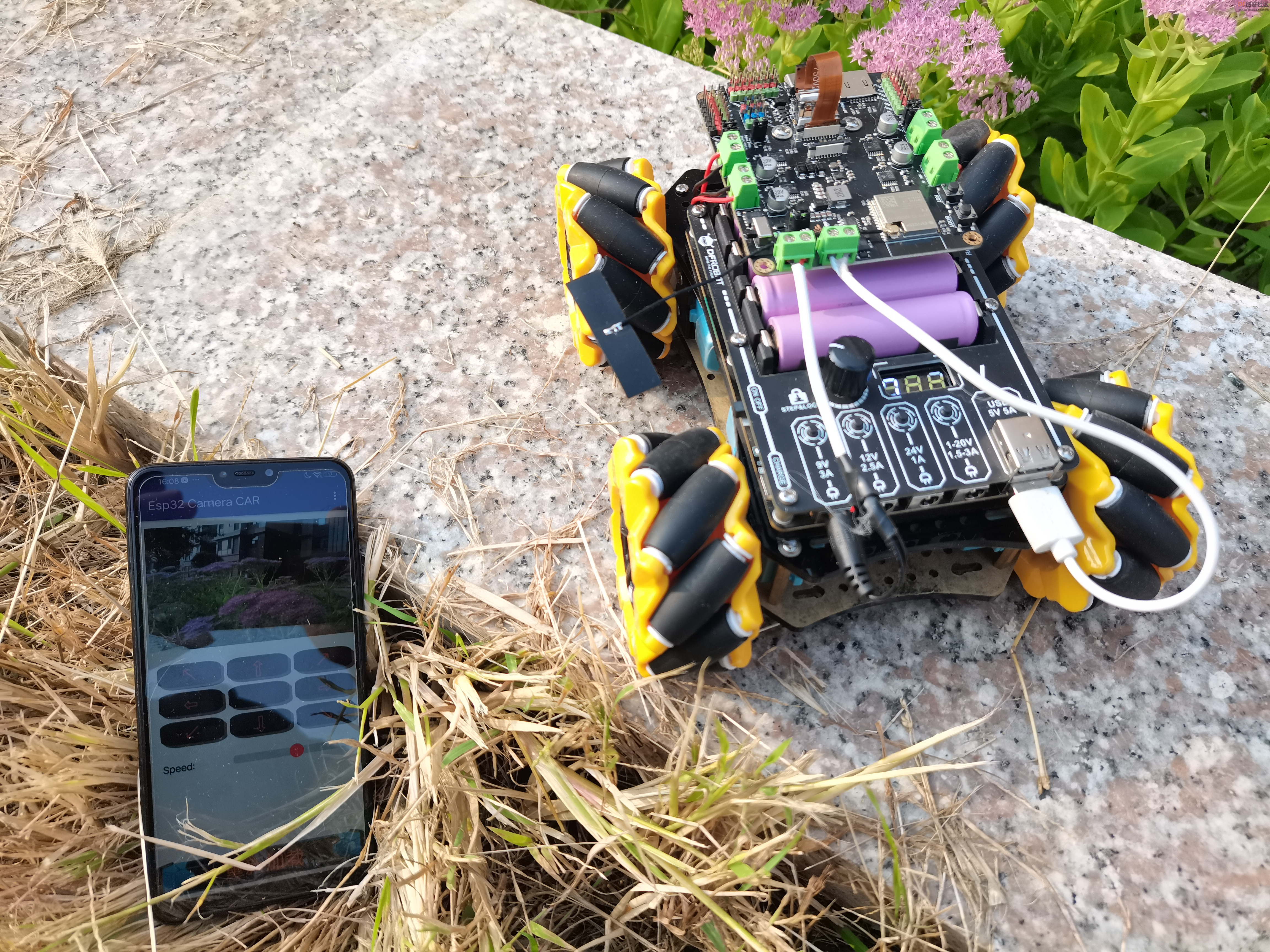
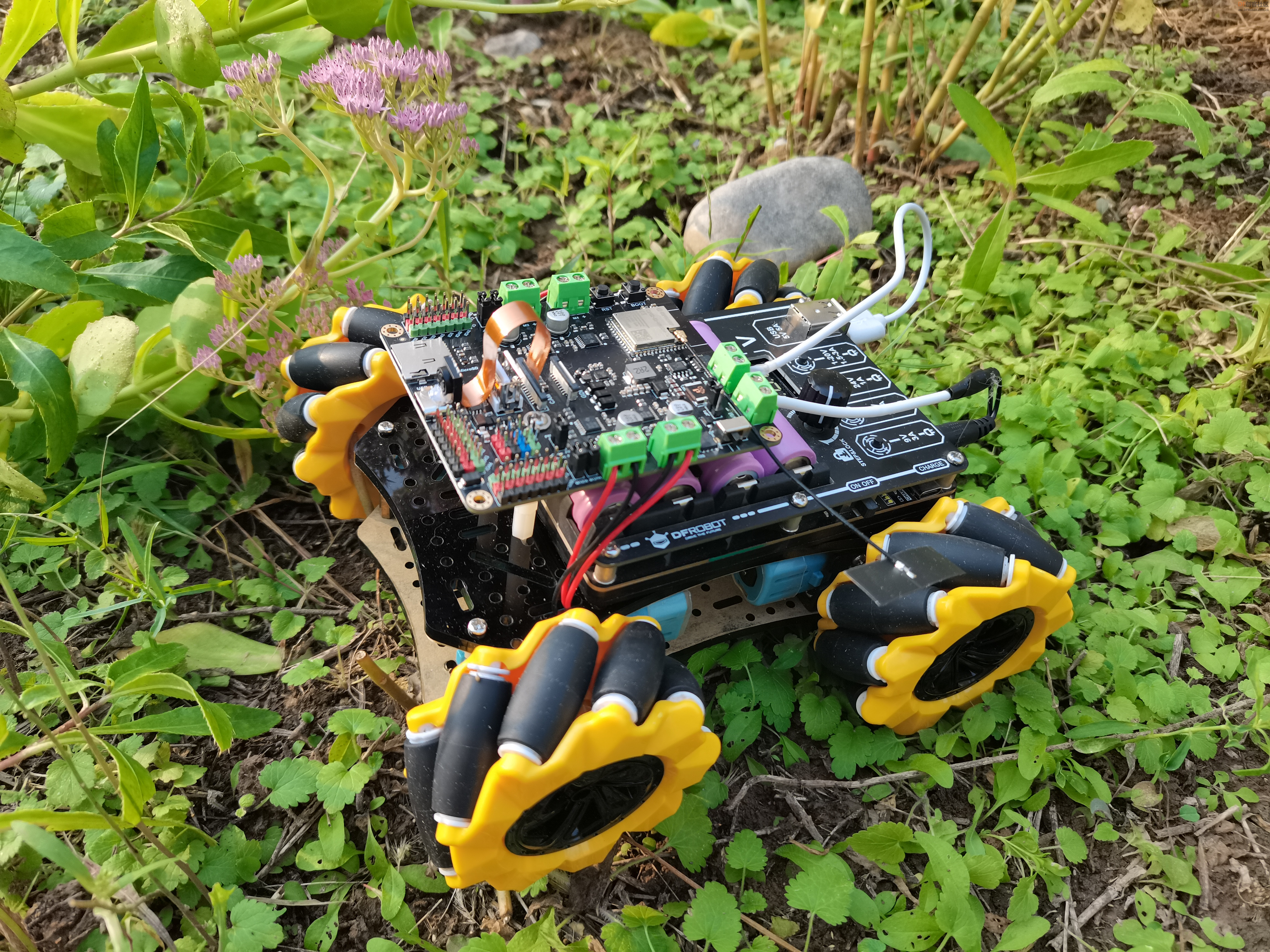
想做一个组装简易的麦克纳姆轮视频车,之前制作的小车,电机需要驱动模块,也需要单独的电源,主控也需要电源。所以硬件设备较多,不好布局,很多时候显得很凌乱。在DF商城上看到了“Romeo ESP32-S3 开发板” Romeo ESP32-S3是为机器人项目设计的一款开发板,可驱动4路电机、图像传输、远程控制。
【项目设计】
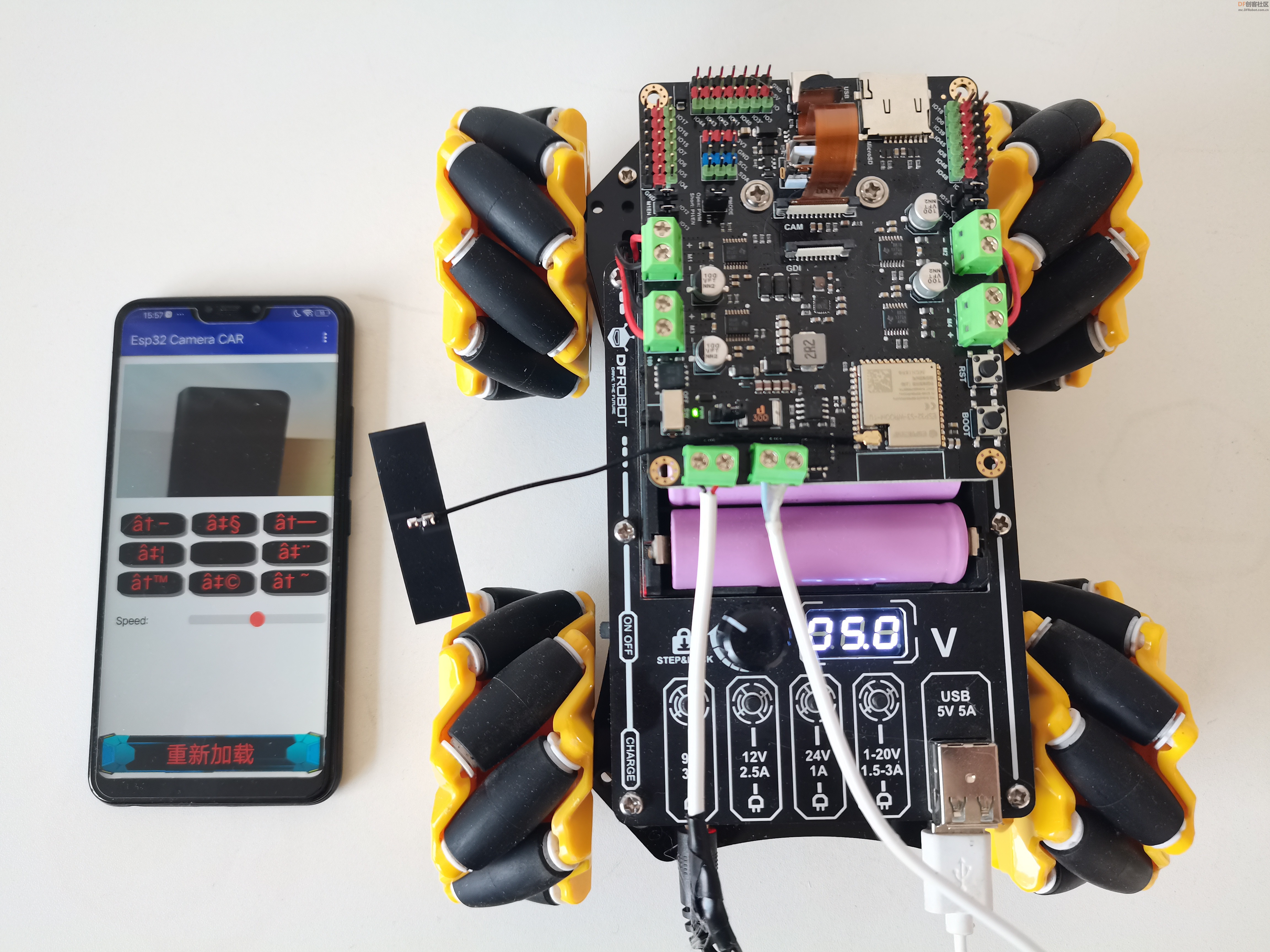
使用“便携式多路可调电源”的USB-A电源口为主控电源供电,9V端口为电机驱动供电。使用“ESPAsyncWebServer库”及“AsyncTCP库”,利用“App Inventor2”的浏览器模块访问192.168.4.1,即可实现手机App驱动小车和查看摄像头数据。
【硬件组装】
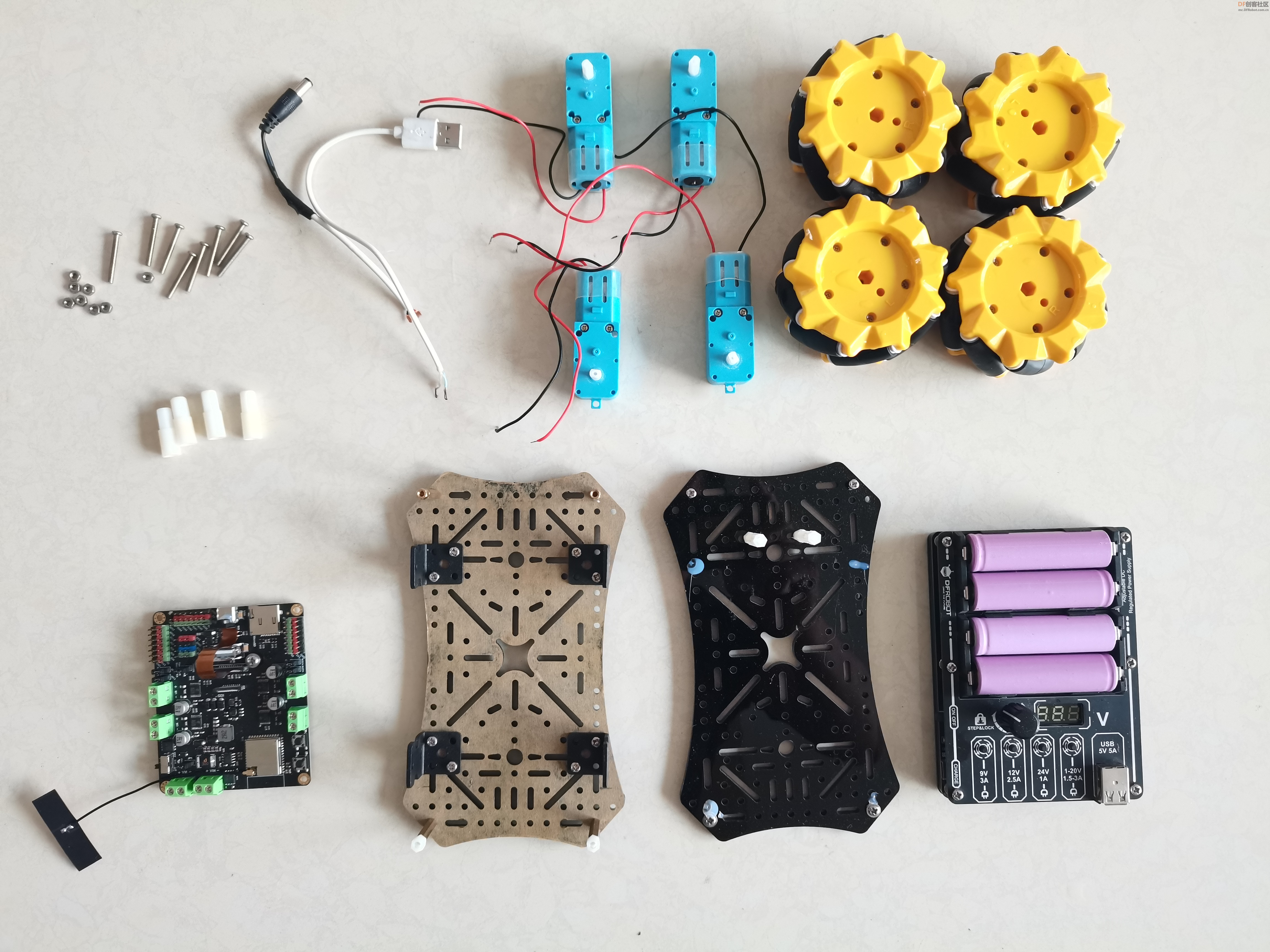
1.所用到硬件
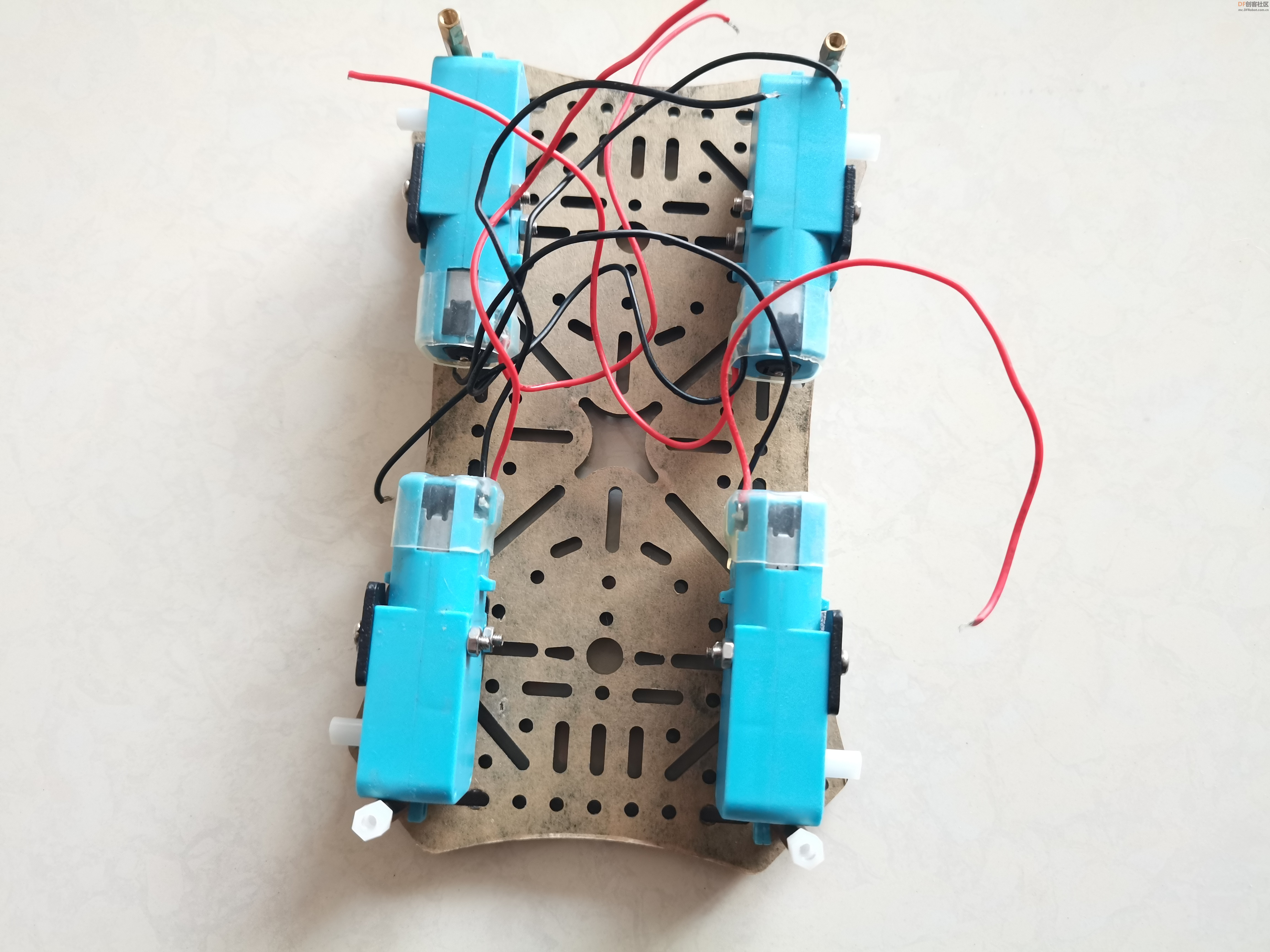
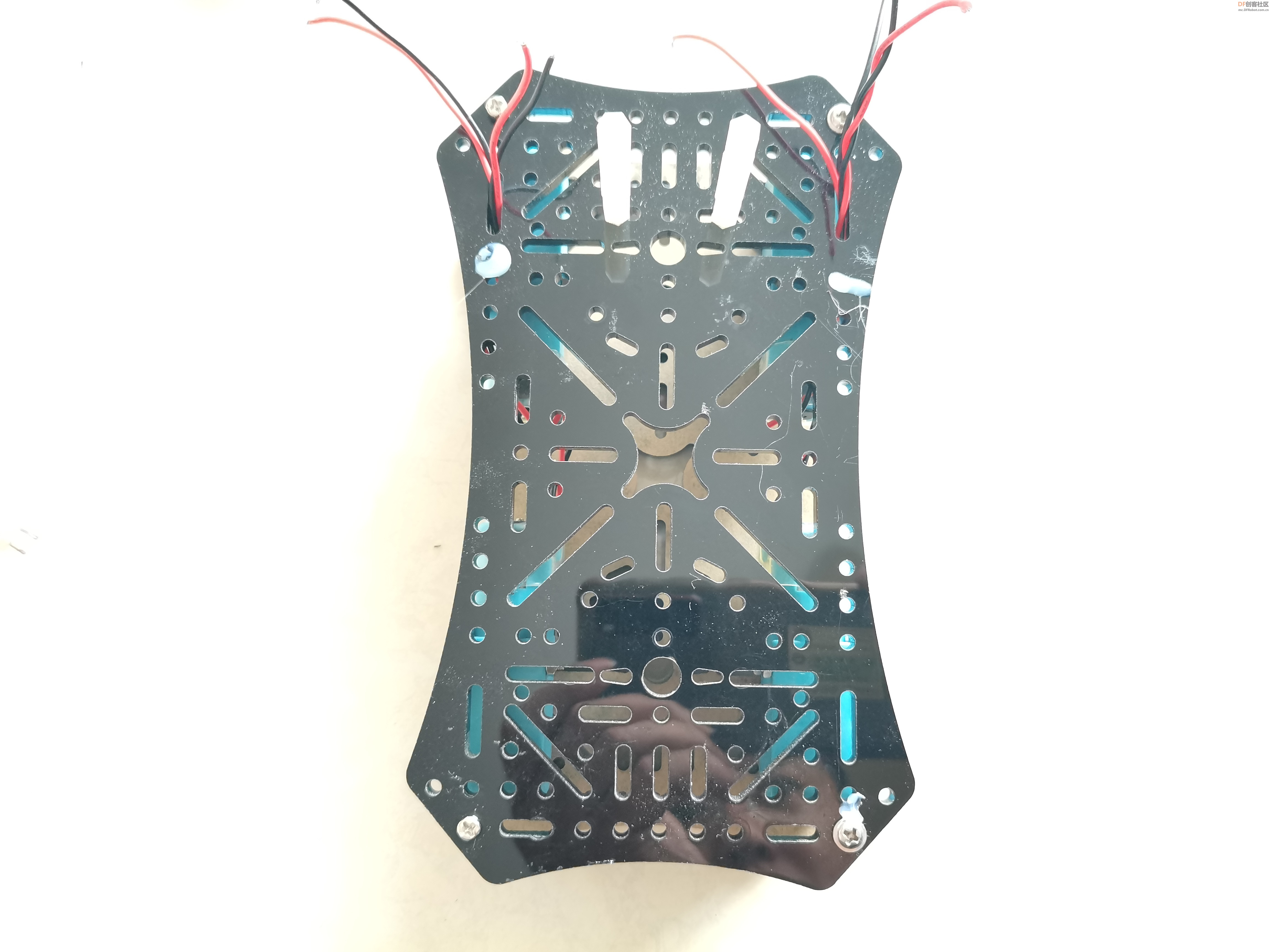
2.安装电机
 3.安装挡板 3.安装挡板
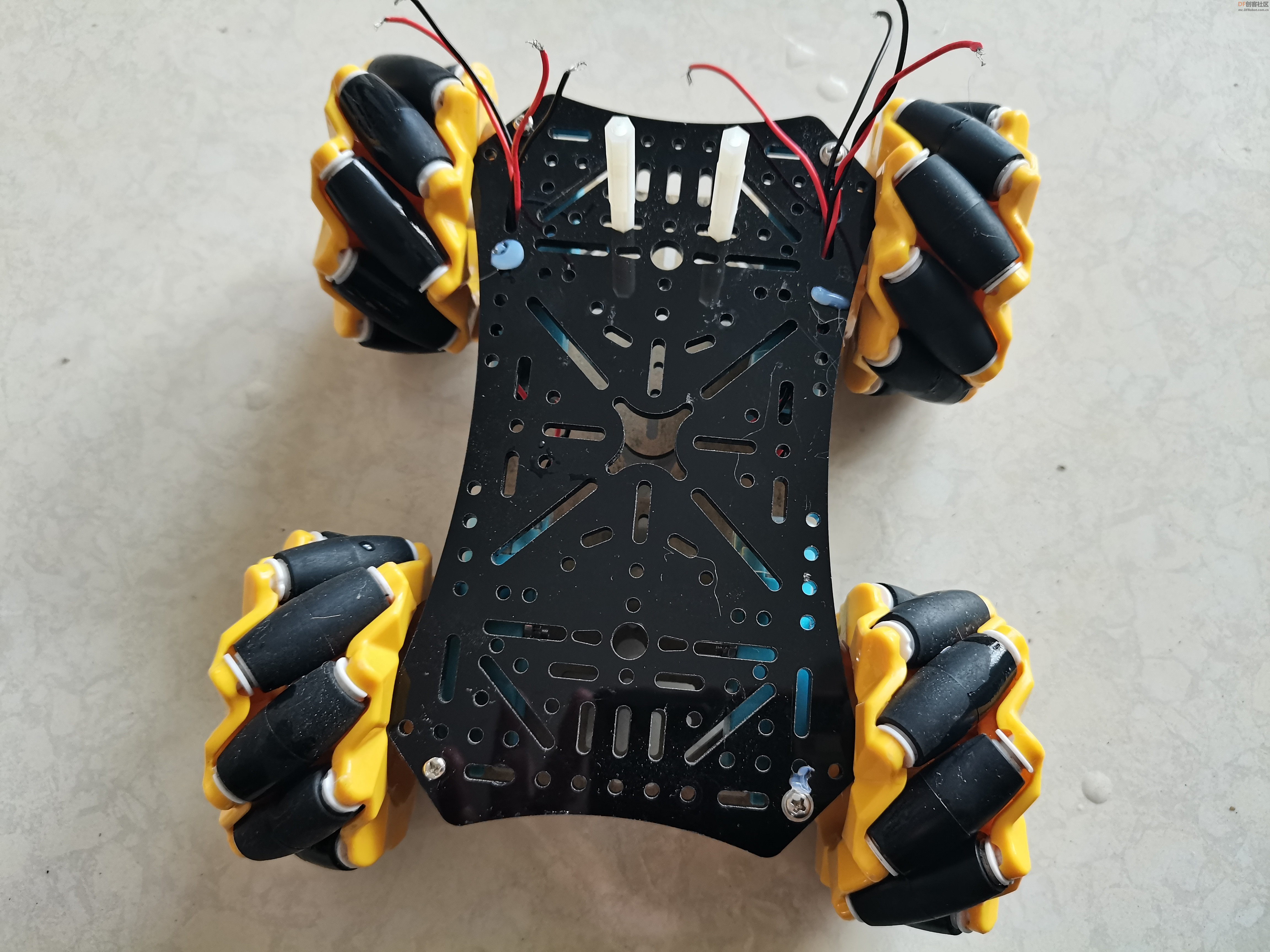
4.安装麦克纳姆轮
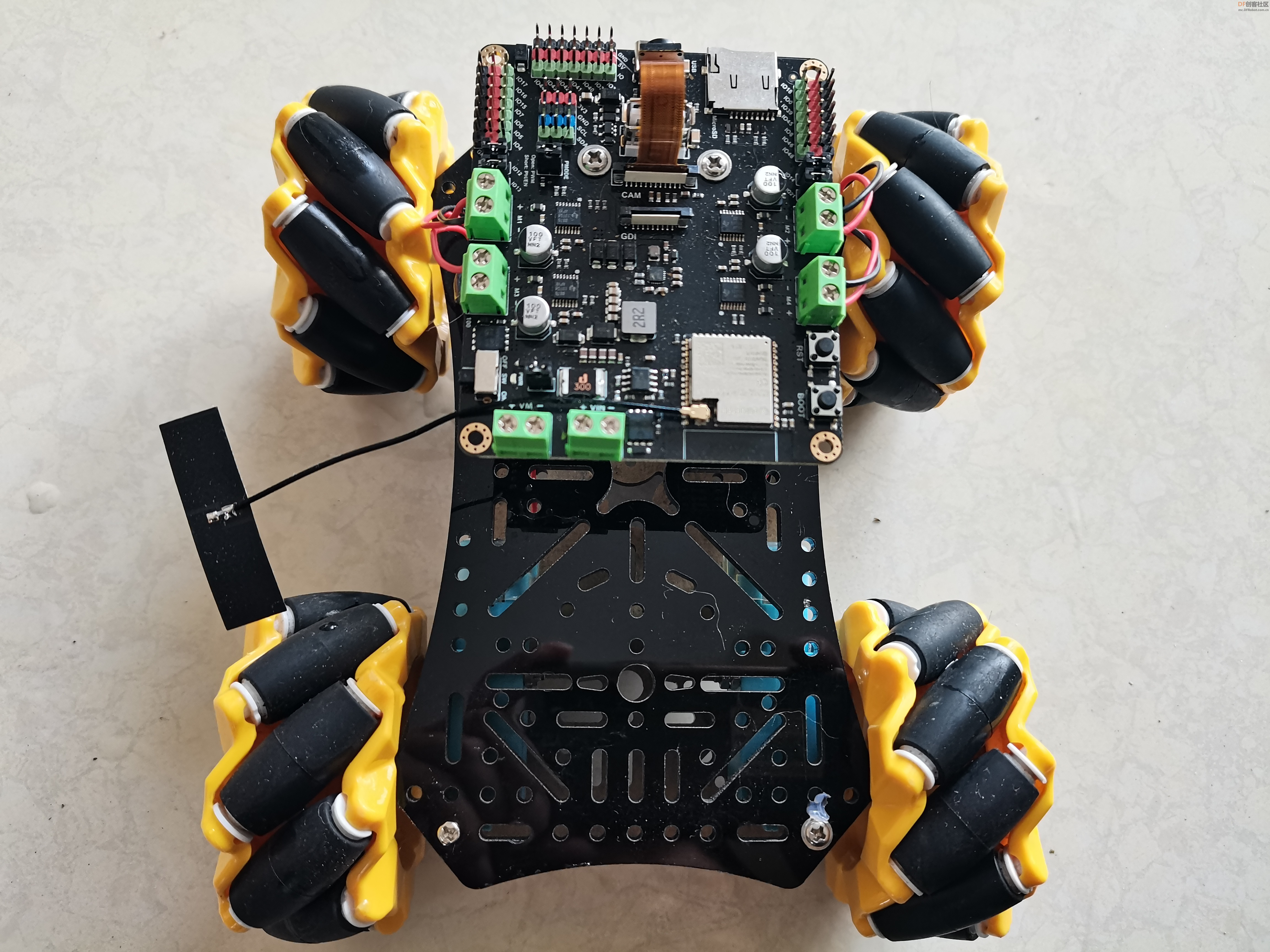
5.安装主控,接电机线
6.安装电源
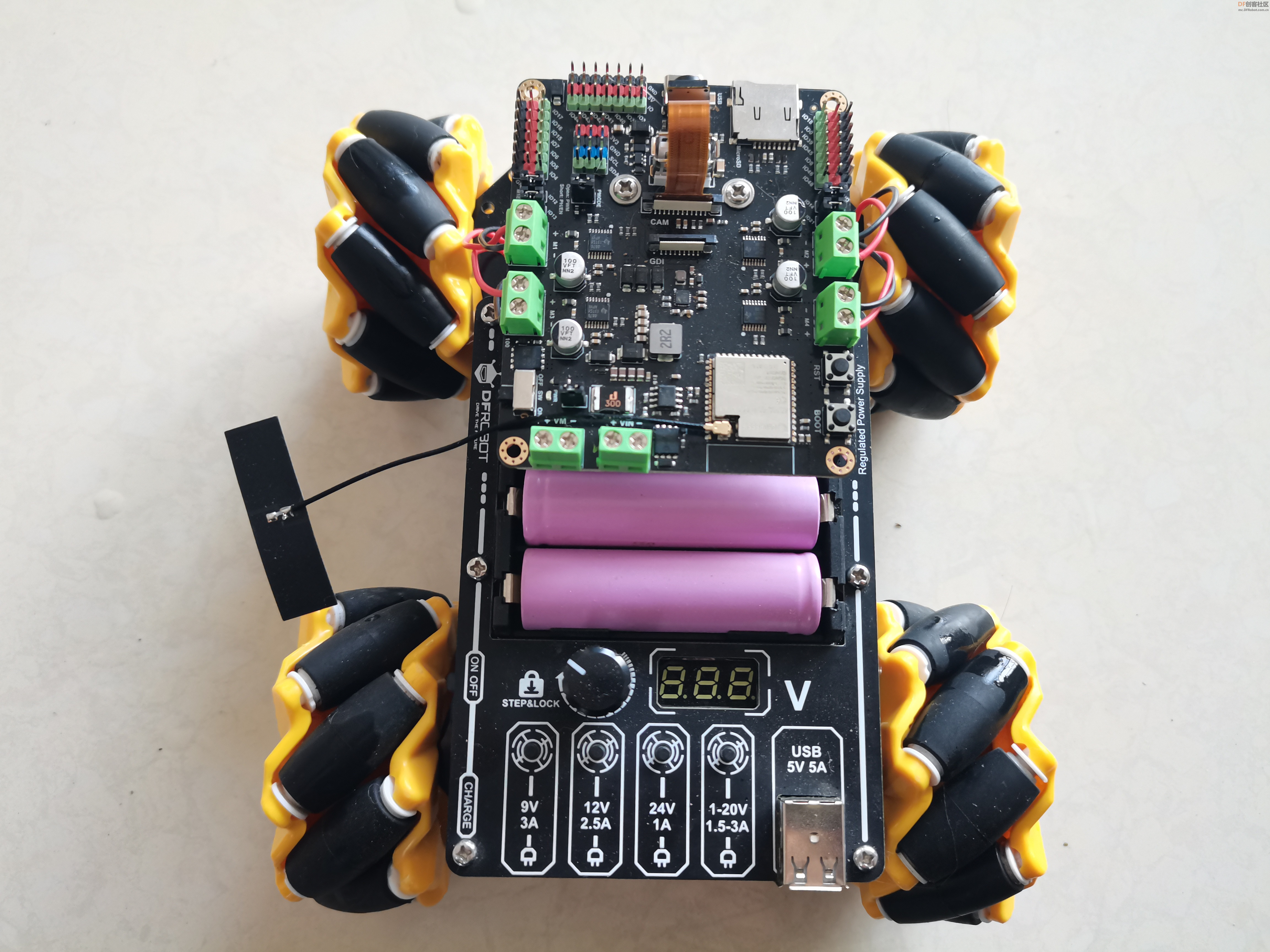
7.接电源线
8.固定摄像头
【制作APP】
1.界面设计
一个网页浏览框和一个按钮
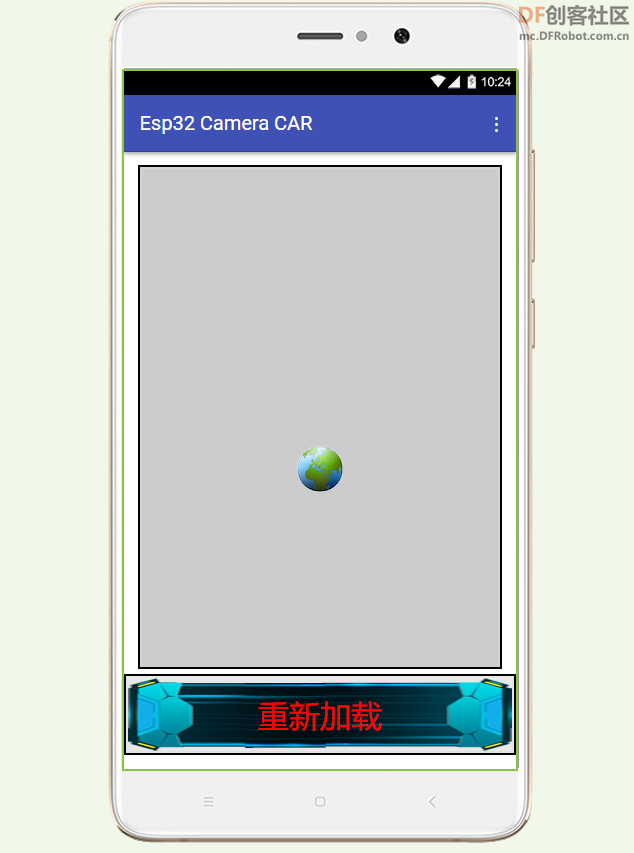
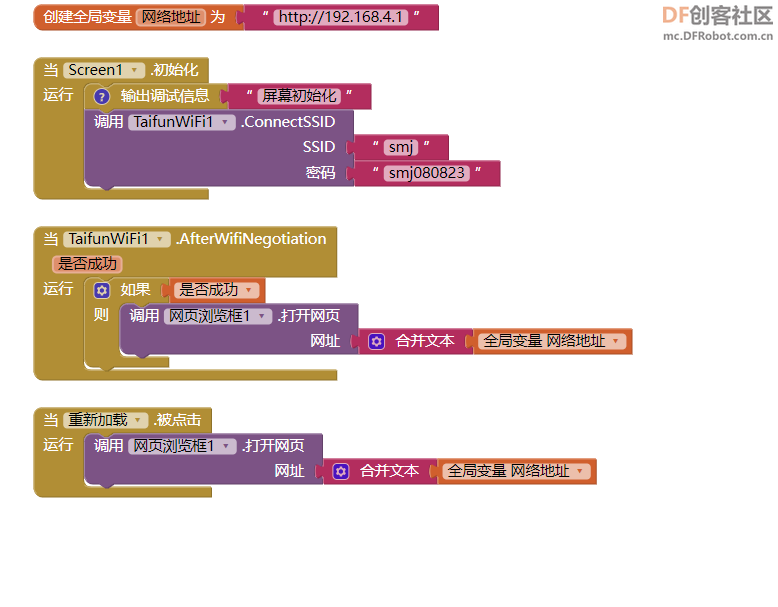
2.程序设计
手机连接“Romeo ESP32-S3 开发板”的WIFI热点,网页浏览框加载“192.168.4.1”。按钮用于当连接中断时,重新连接。
【修改ESP32示例代码】
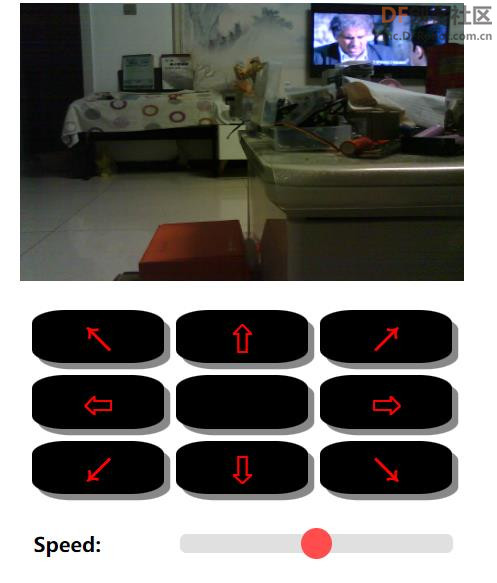
控制页面增加四个方向按钮
-
- <table id="mainTable" style="width:355px;margin:auto;table-layout:fixed" CELLSPACING=10>
- <tr>
- <img id="cameraImage" src="" style="width:355px;height:222px"></td>
- </tr>
- <tr>
- <td class="button" ontouchstart='sendButtonInput("MoveCar","5")' ontouchend='sendButtonInput("MoveCar","0")'><span class="arrows" >↖</span></td>
- <td class="button" ontouchstart='sendButtonInput("MoveCar","1")' ontouchend='sendButtonInput("MoveCar","0")'><span class="arrows" >⇧</span></td>
- <td class="button" ontouchstart='sendButtonInput("MoveCar","6")' ontouchend='sendButtonInput("MoveCar","0")'><span class="arrows" >↗</span></td>
- </tr>
- <tr>
- <td class="button" ontouchstart='sendButtonInput("MoveCar","3")' ontouchend='sendButtonInput("MoveCar","0")'><span class="arrows" >⇦</span></td>
- <td class="button"></td>
- <td class="button" ontouchstart='sendButtonInput("MoveCar","4")' ontouchend='sendButtonInput("MoveCar","0")'><span class="arrows" >⇨</span></td>
- </tr>
- <tr>
- <td class="button" ontouchstart='sendButtonInput("MoveCar","7")' ontouchend='sendButtonInput("MoveCar","0")'><span class="arrows" >↙</span></td>
- <td class="button" ontouchstart='sendButtonInput("MoveCar","2")' ontouchend='sendButtonInput("MoveCar","0")'><span class="arrows" >⇩</span></td>
- <td class="button" ontouchstart='sendButtonInput("MoveCar","8")' ontouchend='sendButtonInput("MoveCar","0")'><span class="arrows" >↘</span></td>
- </tr>
- <tr/><tr/>
- <tr>
- <td style="text-align:left"><b>Speed:</b></td>
- <td colspan=2>
- <div class="slidecontainer">
- <input type="range" min="0" max="100" value="50" class="slider" id="Speed" oninput='sendButtonInput("Speed",value)'>
- </div>
- </td>
- </tr>
-
- </table>
根据麦克纳姆运动特点修改代码。轮麦克纳姆轮与普通轮子的区别在于麦克纳姆轮旋转时,由于存在斜向的从动轮,会同时产生一个斜向的力,当我们控制轮子旋转的速度与方向时,将斜向的力增强或抵消,从而实现小车的全向移动。可以完成横移、斜方向移动等普通小车无法完成的高难度动作,轮子的转动方向与小车的运动方向关系如下图:

-
- void moveCar(uint8_t inputValue,uint8_t speed)
- {
- switch(inputValue)
- {
- case UP:
- retreat(1,speed);
- retreat(2,speed);
- advance(3,speed);
- advance(4,speed);
- break;
-
- case DOWN:
- advance(1,speed);
- advance(2,speed);
- retreat(3,speed);
- retreat(4,speed);
- break;
-
- case LEFT:
- retreat(2,speed);
- retreat(4,speed);
- advance(1,speed);
- advance(3,speed);
- break;
-
- case RIGHT:
- retreat(1,speed);
- retreat(3,speed);
- advance(2,speed);
- advance(4,speed);
- break;
- case Upper_Left:
- breake(1);
- retreat(2,speed);
- advance(3,speed);
- breake(4);
- break;
- case Upper_Right:
- retreat(1,speed);
- breake(2);
- breake(3);
- advance(4,speed);
- break;
- case Bottom_Left:
- advance(1,speed);
- breake(2);
- breake(3);
- retreat(4,speed);
- break;
- case Bottom_Right:
- breake(1);
- advance(2,speed);
- retreat(3,speed);
- breake(4);
- break;
- case STOP:
- breake(1);
- breake(2);
- breake(3);
- breake(4);
- break;
- }
- }
【ESP32 完整代码】
-
- #include "esp_camera.h"
- #include <Arduino.h>
- #include <WiFi.h>
- #include <AsyncTCP.h>
- #include <ESPAsyncWebServer.h>
- #include <iostream>
- #include <sstream>
- #include "DFRobot_AXP313A.h"
- #include "driver/mcpwm.h"
- #include "soc/mcpwm_struct.h"
- #include "soc/mcpwm_reg.h"
-
- DFRobot_AXP313A axp;
-
- #define M1_EN 12
- #define M1_PN 13
- #define M2_EN 14
- #define M2_PN 21
- #define M3_EN 9
- #define M3_PN 10
- #define M4_EN 47
- #define M4_PN 11
-
-
- #define UP 1
- #define DOWN 2
- #define LEFT 3
- #define RIGHT 4
- #define Upper_Left 5
- #define Upper_Right 6
- #define Bottom_Left 7
- #define Bottom_Right 8
- #define STOP 0
-
- #define FORWARD 1
- #define BACKWARD -1
-
- //Camera related constants
- #define PWDN_GPIO_NUM -1
- #define RESET_GPIO_NUM -1
- #define XCLK_GPIO_NUM 45
- #define SIOD_GPIO_NUM 1
- #define SIOC_GPIO_NUM 2
-
- #define Y9_GPIO_NUM 48
- #define Y8_GPIO_NUM 46
- #define Y7_GPIO_NUM 8
- #define Y6_GPIO_NUM 7
- #define Y5_GPIO_NUM 4
- #define Y4_GPIO_NUM 41
- #define Y3_GPIO_NUM 40
- #define Y2_GPIO_NUM 39
- #define VSYNC_GPIO_NUM 6
- #define HREF_GPIO_NUM 42
- #define PCLK_GPIO_NUM 5
-
- const char* ssid = "******";
- const char* password = "*******";
-
- AsyncWebServer server(80);
- AsyncWebSocket wsCamera("/Camera");
- AsyncWebSocket wsCarInput("/CarInput");
- uint32_t cameraClientId = 0;
-
- uint8_t Speed = 50;
-
- const char* htmlHomePage PROGMEM = R"HTMLHOMEPAGE(
- <!DOCTYPE html>
- <html>
- <head>
- <meta name="viewport" content="width=device-width, initial-scale=1, maximum-scale=1, user-scalable=no">
- <style>
- .arrows {
- font-size:30px;
- color:red;
- }
- td.button {
- background-color:black;
- border-radius:25%;
- box-shadow: 5px 5px #888888;
- }
- td.button:active {
- transform: translate(5px,5px);
- box-shadow: none;
- }
-
- .noselect {
- -webkit-touch-callout: none; /* iOS Safari */
- -webkit-user-select: none; /* Safari */
- -khtml-user-select: none; /* Konqueror HTML */
- -moz-user-select: none; /* Firefox */
- -ms-user-select: none; /* Internet Explorer/Edge */
- user-select: none; /* Non-prefixed version, currently
- supported by Chrome and Opera */
- }
-
- .slidecontainer {
- width: 100%;
- }
-
- .slider {
- -webkit-appearance: none;
- width: 100%;
- height: 15px;
- border-radius: 5px;
- background: #d3d3d3;
- outline: none;
- opacity: 0.7;
- -webkit-transition: .2s;
- transition: opacity .2s;
- }
-
- .slider:hover {
- opacity: 1;
- }
-
- .slider::-webkit-slider-thumb {
- -webkit-appearance: none;
- appearance: none;
- width: 25px;
- height: 25px;
- border-radius: 50%;
- background: red;
- cursor: pointer;
- }
-
- .slider::-moz-range-thumb {
- width: 25px;
- height: 25px;
- border-radius: 50%;
- background: red;
- cursor: pointer;
- }
-
- </style>
-
- </head>
- <body class="noselect" align="center" style="background-color:white">
- <table id="mainTable" style="width:355px;margin:auto;table-layout:fixed" CELLSPACING=10>
- <tr>
- <img id="cameraImage" src="" style="width:355px;height:222px"></td>
- </tr>
- <tr>
- <td class="button" ontouchstart='sendButtonInput("MoveCar","5")' ontouchend='sendButtonInput("MoveCar","0")'><span class="arrows" >↖</span></td>
- <td class="button" ontouchstart='sendButtonInput("MoveCar","1")' ontouchend='sendButtonInput("MoveCar","0")'><span class="arrows" >⇧</span></td>
- <td class="button" ontouchstart='sendButtonInput("MoveCar","6")' ontouchend='sendButtonInput("MoveCar","0")'><span class="arrows" >↗</span></td>
- </tr>
- <tr>
- <td class="button" ontouchstart='sendButtonInput("MoveCar","3")' ontouchend='sendButtonInput("MoveCar","0")'><span class="arrows" >⇦</span></td>
- <td class="button"></td>
- <td class="button" ontouchstart='sendButtonInput("MoveCar","4")' ontouchend='sendButtonInput("MoveCar","0")'><span class="arrows" >⇨</span></td>
- </tr>
- <tr>
- <td class="button" ontouchstart='sendButtonInput("MoveCar","7")' ontouchend='sendButtonInput("MoveCar","0")'><span class="arrows" >↙</span></td>
- <td class="button" ontouchstart='sendButtonInput("MoveCar","2")' ontouchend='sendButtonInput("MoveCar","0")'><span class="arrows" >⇩</span></td>
- <td class="button" ontouchstart='sendButtonInput("MoveCar","8")' ontouchend='sendButtonInput("MoveCar","0")'><span class="arrows" >↘</span></td>
- </tr>
- <tr/><tr/>
- <tr>
- <td style="text-align:left"><b>Speed:</b></td>
- <td colspan=2>
- <div class="slidecontainer">
- <input type="range" min="0" max="100" value="50" class="slider" id="Speed" oninput='sendButtonInput("Speed",value)'>
- </div>
- </td>
- </tr>
-
- </table>
-
- <script>
- var webSocketCameraUrl = "ws:\/\/" + window.location.hostname + "/Camera";
- var webSocketCarInputUrl = "ws:\/\/" + window.location.hostname + "/CarInput";
- var websocketCamera;
- var websocketCarInput;
-
- function initCameraWebSocket()
- {
- websocketCamera = new WebSocket(webSocketCameraUrl);
- websocketCamera.binaryType = 'blob';
- websocketCamera.onopen = function(event){};
- websocketCamera.onclose = function(event){setTimeout(initCameraWebSocket, 2000);};
- websocketCamera.onmessage = function(event)
- {
- var imageId = document.getElementById("cameraImage");
- imageId.src = URL.createObjectURL(event.data);
- };
- }
-
- function initCarInputWebSocket()
- {
- websocketCarInput = new WebSocket(webSocketCarInputUrl);
- websocketCarInput.onopen = function(event)
- {
- sendButtonInput("Speed", document.getElementById("Speed").value);
-
- };
- websocketCarInput.onclose = function(event){setTimeout(initCarInputWebSocket, 2000);};
- websocketCarInput.onmessage = function(event){};
- }
-
- function initWebSocket()
- {
- initCameraWebSocket ();
- initCarInputWebSocket();
- }
-
- function sendButtonInput(key, value)
- {
- var data = key + "," + value;
- websocketCarInput.send(data);
- }
-
- window.onload = initWebSocket;
- document.getElementById("mainTable").addEventListener("touchend", function(event){
- event.preventDefault()
- });
- </script>
- </body>
- </html>
- )HTMLHOMEPAGE";
-
-
- void advance(uint8_t motorNumber,uint8_t speed)
- {
- switch(motorNumber)
- {
- case 1:
- mcpwm_set_signal_high(MCPWM_UNIT_0,MCPWM_TIMER_0,MCPWM_GEN_B);//给PH一个持续的高电平
- mcpwm_set_duty_type(MCPWM_UNIT_0,MCPWM_TIMER_0,MCPWM_GEN_A,MCPWM_DUTY_MODE_0);
- mcpwm_set_duty(MCPWM_UNIT_0,MCPWM_TIMER_0,MCPWM_GEN_A,speed);//EN引脚输出占空比为“speed”的PWM波
- break;
-
- case 2:
- mcpwm_set_signal_high(MCPWM_UNIT_0,MCPWM_TIMER_1,MCPWM_GEN_B);//给PH一个持续的高电平
- mcpwm_set_duty_type(MCPWM_UNIT_0,MCPWM_TIMER_1,MCPWM_GEN_A,MCPWM_DUTY_MODE_0);
- mcpwm_set_duty(MCPWM_UNIT_0,MCPWM_TIMER_1,MCPWM_GEN_A,speed);//EN引脚输出占空比为“speed”的PWM波
- break;
-
- case 3:
- mcpwm_set_signal_high(MCPWM_UNIT_1,MCPWM_TIMER_0,MCPWM_GEN_B);//给PH一个持续的高电平
- mcpwm_set_duty_type(MCPWM_UNIT_1,MCPWM_TIMER_0,MCPWM_GEN_A,MCPWM_DUTY_MODE_0);
- mcpwm_set_duty(MCPWM_UNIT_1,MCPWM_TIMER_0,MCPWM_GEN_A,speed);//EN引脚输出占空比为“speed”的PWM波
- break;
-
- case 4:
- mcpwm_set_signal_high(MCPWM_UNIT_1,MCPWM_TIMER_1,MCPWM_GEN_B);//给PH一个持续的高电平
- mcpwm_set_duty_type(MCPWM_UNIT_1,MCPWM_TIMER_1,MCPWM_GEN_A,MCPWM_DUTY_MODE_0);
- mcpwm_set_duty(MCPWM_UNIT_1,MCPWM_TIMER_1,MCPWM_GEN_A,speed);//EN引脚输出占空比为“speed”的PWM波
- break;
- }
- }
-
- void retreat(uint8_t motorNumber,uint8_t speed)
- {
- switch(motorNumber)
- {
- case 1:
- mcpwm_set_signal_low(MCPWM_UNIT_0,MCPWM_TIMER_0,MCPWM_GEN_B);//给PH一个持续的低电平
- mcpwm_set_duty_type(MCPWM_UNIT_0,MCPWM_TIMER_0,MCPWM_GEN_A,MCPWM_DUTY_MODE_0);
- mcpwm_set_duty(MCPWM_UNIT_0,MCPWM_TIMER_0,MCPWM_GEN_A,speed);//EN引脚输出占空比为“speed”的PWM波
- break;
-
- case 2:
- mcpwm_set_signal_low(MCPWM_UNIT_0,MCPWM_TIMER_1,MCPWM_GEN_B);//给PH一个持续的低电平
- mcpwm_set_duty_type(MCPWM_UNIT_0,MCPWM_TIMER_1,MCPWM_GEN_A,MCPWM_DUTY_MODE_0);
- mcpwm_set_duty(MCPWM_UNIT_0,MCPWM_TIMER_1,MCPWM_GEN_A,speed);//EN引脚输出占空比为“speed”的PWM波
- break;
-
- case 3:
- mcpwm_set_signal_low(MCPWM_UNIT_1,MCPWM_TIMER_0,MCPWM_GEN_B);//给PH一个持续的低电平
- mcpwm_set_duty_type(MCPWM_UNIT_1,MCPWM_TIMER_0,MCPWM_GEN_A,MCPWM_DUTY_MODE_0);
- mcpwm_set_duty(MCPWM_UNIT_1,MCPWM_TIMER_0,MCPWM_GEN_A,speed);//EN引脚输出占空比为“speed”的PWM波
- break;
-
- case 4:
- mcpwm_set_signal_low(MCPWM_UNIT_1,MCPWM_TIMER_1,MCPWM_GEN_B);//给PH一个持续的低电平
- mcpwm_set_duty_type(MCPWM_UNIT_1,MCPWM_TIMER_1,MCPWM_GEN_A,MCPWM_DUTY_MODE_0);
- mcpwm_set_duty(MCPWM_UNIT_1,MCPWM_TIMER_1,MCPWM_GEN_A,speed);//EN引脚输出占空比为“speed”的PWM波
- break;
- }
- }
-
- void breake(uint8_t motorNumber)
- {
- switch(motorNumber)
- {
- case 1:
- mcpwm_set_signal_low(MCPWM_UNIT_0,MCPWM_TIMER_0,MCPWM_GEN_A);
- break;
-
- case 2:
- mcpwm_set_signal_low(MCPWM_UNIT_0,MCPWM_TIMER_1,MCPWM_GEN_A);
- break;
-
- case 3:
- mcpwm_set_signal_low(MCPWM_UNIT_1,MCPWM_TIMER_0,MCPWM_GEN_A);
- break;
-
- case 4:
- mcpwm_set_signal_low(MCPWM_UNIT_1,MCPWM_TIMER_1,MCPWM_GEN_A);
- break;
- }
- }
-
- void moveCar(uint8_t inputValue,uint8_t speed)
- {
- switch(inputValue)
- {
- case UP:
- retreat(1,speed);
- retreat(2,speed);
- advance(3,speed);
- advance(4,speed);
- break;
-
- case DOWN:
- advance(1,speed);
- advance(2,speed);
- retreat(3,speed);
- retreat(4,speed);
- break;
-
- case LEFT:
- retreat(2,speed);
- retreat(4,speed);
- advance(1,speed);
- advance(3,speed);
- break;
-
- case RIGHT:
- retreat(1,speed);
- retreat(3,speed);
- advance(2,speed);
- advance(4,speed);
- break;
- case Upper_Left:
- breake(1);
- retreat(2,speed);
- advance(3,speed);
- breake(4);
- break;
- case Upper_Right:
- retreat(1,speed);
- breake(2);
- breake(3);
- advance(4,speed);
- break;
- case Bottom_Left:
- advance(1,speed);
- breake(2);
- breake(3);
- retreat(4,speed);
- break;
- case Bottom_Right:
- breake(1);
- advance(2,speed);
- retreat(3,speed);
- breake(4);
- break;
- case STOP:
- breake(1);
- breake(2);
- breake(3);
- breake(4);
- break;
- }
- }
-
- void handleRoot(AsyncWebServerRequest *request)
- {
- request->send_P(200, "text/html", htmlHomePage);
- }
-
- void handleNotFound(AsyncWebServerRequest *request)
- {
- request->send(404, "text/plain", "File Not Found");
- }
-
- void onCarInputWebSocketEvent(AsyncWebSocket *server,
- AsyncWebSocketClient *client,
- AwsEventType type,
- void *arg,
- uint8_t *data,
- size_t len)
- {
- switch (type)
- {
- case WS_EVT_CONNECT:
- Serial.printf("WebSocket client #%u connected from %s\n", client->id(), client->remoteIP().toString().c_str());
- break;
- case WS_EVT_DISCONNECT:
- Serial.printf("WebSocket client #%u disconnected\n", client->id());
- moveCar(STOP,0);
- //ledcWrite(PWMLightChannel, 0);
- //panServo.write(90);
- //tiltServo.write(90);
- break;
- case WS_EVT_DATA:
- AwsFrameInfo *info;
- info = (AwsFrameInfo*)arg;
- if (info->final && info->index == 0 && info->len == len && info->opcode == WS_TEXT)
- {
- std::string myData = "";
- myData.assign((char *)data, len);
- std::istringstream ss(myData);
- std::string key, value;
- std::getline(ss, key, ',');
- std::getline(ss, value, ',');
- Serial.printf("Key [%s] Value[%s]\n", key.c_str(), value.c_str());
- int valueInt = atoi(value.c_str());
- if (key == "MoveCar")
- {
- moveCar(valueInt,Speed);
- }
- else if (key == "Speed")
- {
- Speed = valueInt;
- }
- /*else if (key == "Light")
- {
- //ledcWrite(PWMLightChannel, valueInt);
- }
- else if (key == "Pan")
- {
- //panServo.write(valueInt);
- }
- else if (key == "Tilt")
- {
- //tiltServo.write(valueInt);
- } */
- }
- break;
- case WS_EVT_PONG:
- case WS_EVT_ERROR:
- break;
- default:
- break;
- }
- }
-
- void onCameraWebSocketEvent(AsyncWebSocket *server,
- AsyncWebSocketClient *client,
- AwsEventType type,
- void *arg,
- uint8_t *data,
- size_t len)
- {
- switch (type)
- {
- case WS_EVT_CONNECT:
- Serial.printf("WebSocket client #%u connected from %s\n", client->id(), client->remoteIP().toString().c_str());
- cameraClientId = client->id();
- break;
- case WS_EVT_DISCONNECT:
- Serial.printf("WebSocket client #%u disconnected\n", client->id());
- cameraClientId = 0;
- break;
- case WS_EVT_DATA:
- break;
- case WS_EVT_PONG:
- case WS_EVT_ERROR:
- break;
- default:
- break;
- }
- }
-
- void setupCamera()
- {
- camera_config_t config;
- config.ledc_channel = LEDC_CHANNEL_0;
- config.ledc_timer = LEDC_TIMER_0;
- config.pin_d0 = Y2_GPIO_NUM;
- config.pin_d1 = Y3_GPIO_NUM;
- config.pin_d2 = Y4_GPIO_NUM;
- config.pin_d3 = Y5_GPIO_NUM;
- config.pin_d4 = Y6_GPIO_NUM;
- config.pin_d5 = Y7_GPIO_NUM;
- config.pin_d6 = Y8_GPIO_NUM;
- config.pin_d7 = Y9_GPIO_NUM;
- config.pin_xclk = XCLK_GPIO_NUM;
- config.pin_pclk = PCLK_GPIO_NUM;
- config.pin_vsync = VSYNC_GPIO_NUM;
- config.pin_href = HREF_GPIO_NUM;
- config.pin_sscb_sda = SIOD_GPIO_NUM;
- config.pin_sscb_scl = SIOC_GPIO_NUM;
- config.pin_pwdn = PWDN_GPIO_NUM;
- config.pin_reset = RESET_GPIO_NUM;
- config.xclk_freq_hz = 20000000;
- config.frame_size = FRAMESIZE_UXGA;
- config.pixel_format = PIXFORMAT_JPEG; // for streaming
- //config.pixel_format = PIXFORMAT_RGB565; // for face detection/recognition
- config.grab_mode = CAMERA_GRAB_WHEN_EMPTY;
- config.fb_location = CAMERA_FB_IN_PSRAM;
- config.jpeg_quality = 12;
- config.fb_count = 1;
-
- // if PSRAM IC present, init with UXGA resolution and higher JPEG quality
- // for larger pre-allocated frame buffer.
- if(config.pixel_format == PIXFORMAT_JPEG){
- if(psramFound()){
- config.jpeg_quality = 10;
- config.fb_count = 2;
- config.grab_mode = CAMERA_GRAB_LATEST;
- } else {
- // Limit the frame size when PSRAM is not available
- config.frame_size = FRAMESIZE_SVGA;
- config.fb_location = CAMERA_FB_IN_DRAM;
- }
- } else {
- // Best option for face detection/recognition
- config.frame_size = FRAMESIZE_240X240;
- #if CONFIG_IDF_TARGET_ESP32S3
- config.fb_count = 2;
- #endif
- }
-
-
- // camera init
- esp_err_t err = esp_camera_init(&config);
- if (err != ESP_OK)
- {
- Serial.printf("Camera init failed with error 0x%x", err);
- return;
- }
-
- if (psramFound())
- {
- heap_caps_malloc_extmem_enable(20000);
- Serial.printf("PSRAM initialized. malloc to take memory from psram above this size");
- }
- }
-
- void sendCameraPicture()
- {
- if (cameraClientId == 0)
- {
- return;
- }
- unsigned long startTime1 = millis();
- //capture a frame
- camera_fb_t * fb = esp_camera_fb_get();
- if (!fb)
- {
- Serial.println("Frame buffer could not be acquired");
- return;
- }
-
- unsigned long startTime2 = millis();
- wsCamera.binary(cameraClientId, fb->buf, fb->len);
- esp_camera_fb_return(fb);
-
- //Wait for message to be delivered
- while (true)
- {
- AsyncWebSocketClient * clientPointer = wsCamera.client(cameraClientId);
- if (!clientPointer || !(clientPointer->queueIsFull()))
- {
- break;
- }
- delay(1);
- }
-
- unsigned long startTime3 = millis();
- Serial.printf("Time taken Total: %d|%d|%d\n",startTime3 - startTime1, startTime2 - startTime1, startTime3-startTime2 );
- }
-
- //初始化需要产生PWM信号的引脚
- void mcpwm_init(void)
- {
- //配置mcpwm信息
- mcpwm_config_t pwm_config;
- pwm_config.frequency = 1000;
- pwm_config.cmpr_a = 0;
- pwm_config.cmpr_b = 0;
- pwm_config.counter_mode = MCPWM_UP_COUNTER;
- pwm_config.duty_mode = MCPWM_DUTY_MODE_0;
-
- //A速度 B方向
- mcpwm_gpio_init(MCPWM_UNIT_0,MCPWM0A,M1_EN);//电机1 GPIO
- mcpwm_gpio_init(MCPWM_UNIT_0,MCPWM0B,M1_PN);
- mcpwm_init(MCPWM_UNIT_0,MCPWM_TIMER_0,&pwm_config);//初始化mcpwm的某一个单元并绑定时钟
-
- mcpwm_gpio_init(MCPWM_UNIT_0,MCPWM1A,M2_EN);//电机2 GPIO
- mcpwm_gpio_init(MCPWM_UNIT_0,MCPWM1B,M2_PN);
- mcpwm_init(MCPWM_UNIT_0,MCPWM_TIMER_1,&pwm_config);//初始化mcpwm的某一个单元并绑定时钟
-
- mcpwm_gpio_init(MCPWM_UNIT_1,MCPWM0A,M3_EN);//电机3 GPIO
- mcpwm_gpio_init(MCPWM_UNIT_1,MCPWM0B,M3_PN);
- mcpwm_init(MCPWM_UNIT_1,MCPWM_TIMER_0,&pwm_config);//初始化mcpwm的某一个单元并绑定时钟
-
- mcpwm_gpio_init(MCPWM_UNIT_1,MCPWM1A,M4_EN);//电机4 GPIO
- mcpwm_gpio_init(MCPWM_UNIT_1,MCPWM1B,M4_PN);
- mcpwm_init(MCPWM_UNIT_1,MCPWM_TIMER_1,&pwm_config);//初始化mcpwm的某一个单元并绑定时钟
- }
-
-
- void setup(void)
- {
- Serial.begin(115200);
- while(axp.begin() != 0){
- Serial.println("init error");
- delay(1000);
- }
- axp.enableCameraPower(axp.eOV2640);//设置摄像头供电
- mcpwm_init();
-
- WiFi.softAP(ssid, password);
- IPAddress IP = WiFi.softAPIP();
- Serial.print("AP IP address: ");
- Serial.println(IP);
-
- server.on("/", HTTP_GET, handleRoot);
- server.onNotFound(handleNotFound);
-
- wsCamera.onEvent(onCameraWebSocketEvent);
- server.addHandler(&wsCamera);
-
- wsCarInput.onEvent(onCarInputWebSocketEvent);
- server.addHandler(&wsCarInput);
-
- server.begin();
- Serial.println("HTTP server started");
-
- setupCamera();
- }
-
-
- void loop()
- {
- wsCamera.cleanupClients();
- wsCarInput.cleanupClients();
- sendCameraPicture();
- //Serial.printf("SPIRam Total heap %d, SPIRam Free Heap %d\n", ESP.getPsramSize(), ESP.getFreePsram());
- }
【演示视频】
|



 沪公网安备31011502402448
沪公网安备31011502402448
 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶 。要按照X方向安装
。要按照X方向安装
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创客造
创客造
 编辑选择奖
编辑选择奖
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






