|
2128| 14
|
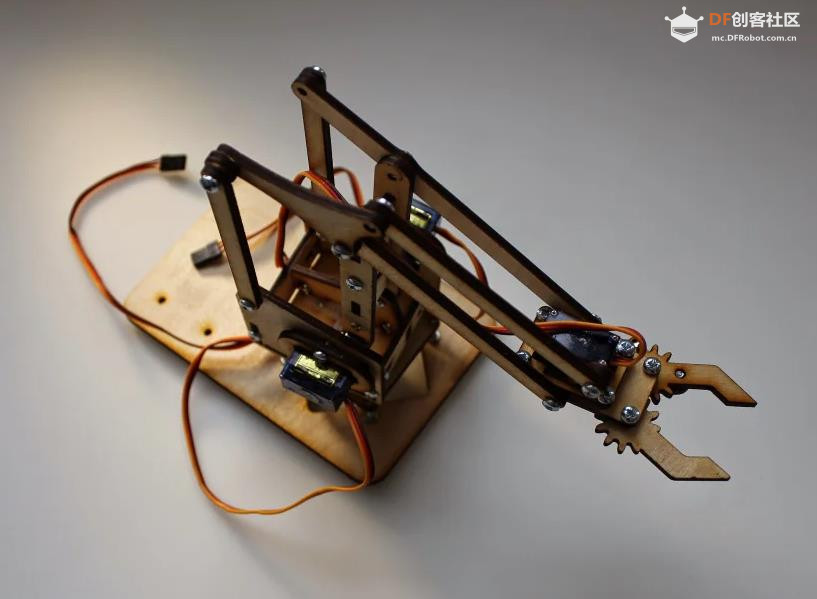
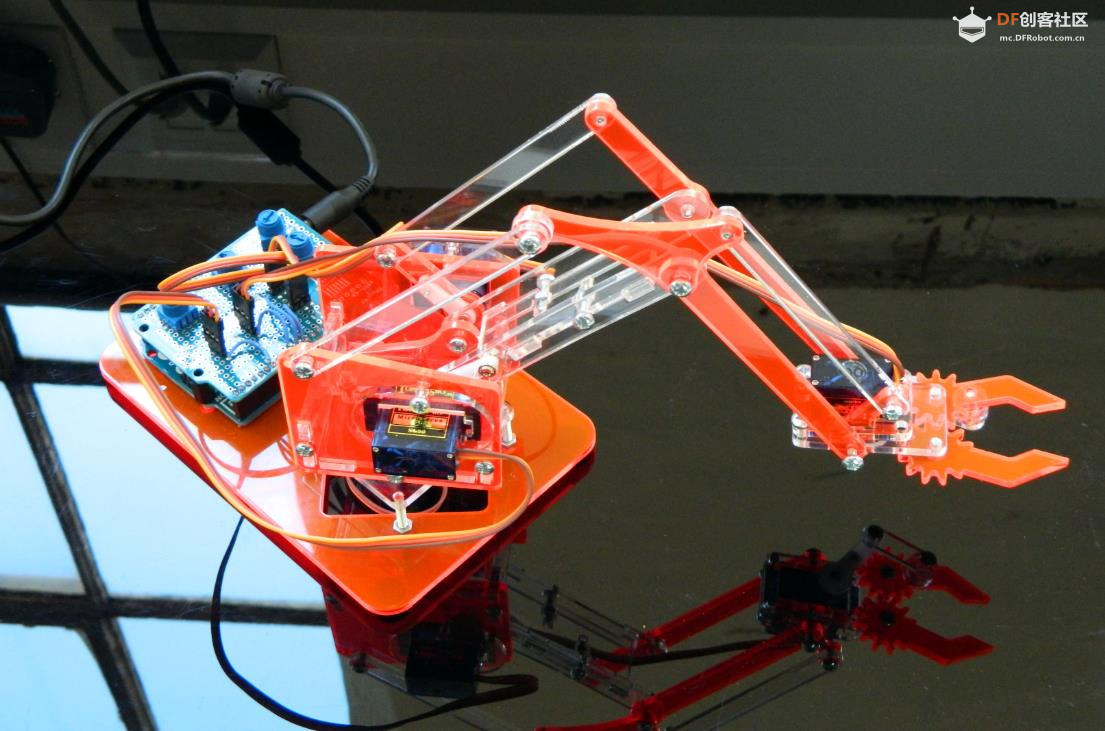
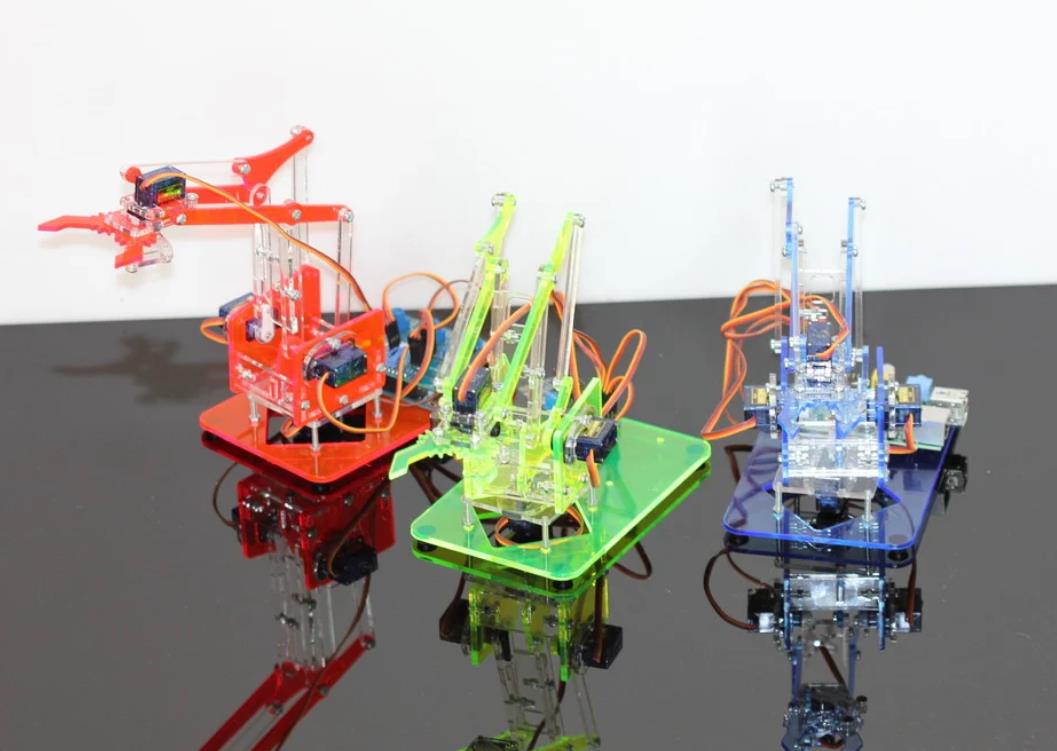
[项目] 【Arduino 动手做】MeArm - 构建可破解的机器人手臂 v0.3版本 |
|
第 1 步:收集您的零件! 第一步是收集你的零件。MeArm 的文件可在 thingiverse 上找到: MeArm v0.3 (当前版本) 4 个业余舵机(9g 型) 3mm 机械螺钉(M3 固定件) 我们在 www.phenoptix.com 出售所有这些零件的套件。如果您有激光切割机并且不介意等待来自中国的零件,您可以以不到 10 美元的价格将整个东西组装在一起。像 Ponoko 这样的地方会为您切割文件,或者最好找到当地的 hackspace 并学习如何使用激光切割机。 您需要的 M3 固定件是: 20 毫米 x 4 10 毫米 x 2 12 毫米 x 10 8 毫米 x 13 6 毫米 x 11 坚果 x 14 对不起所有在美国的人,但 imperial 是一个非常愚蠢的系统! 所需工具 螺丝刀 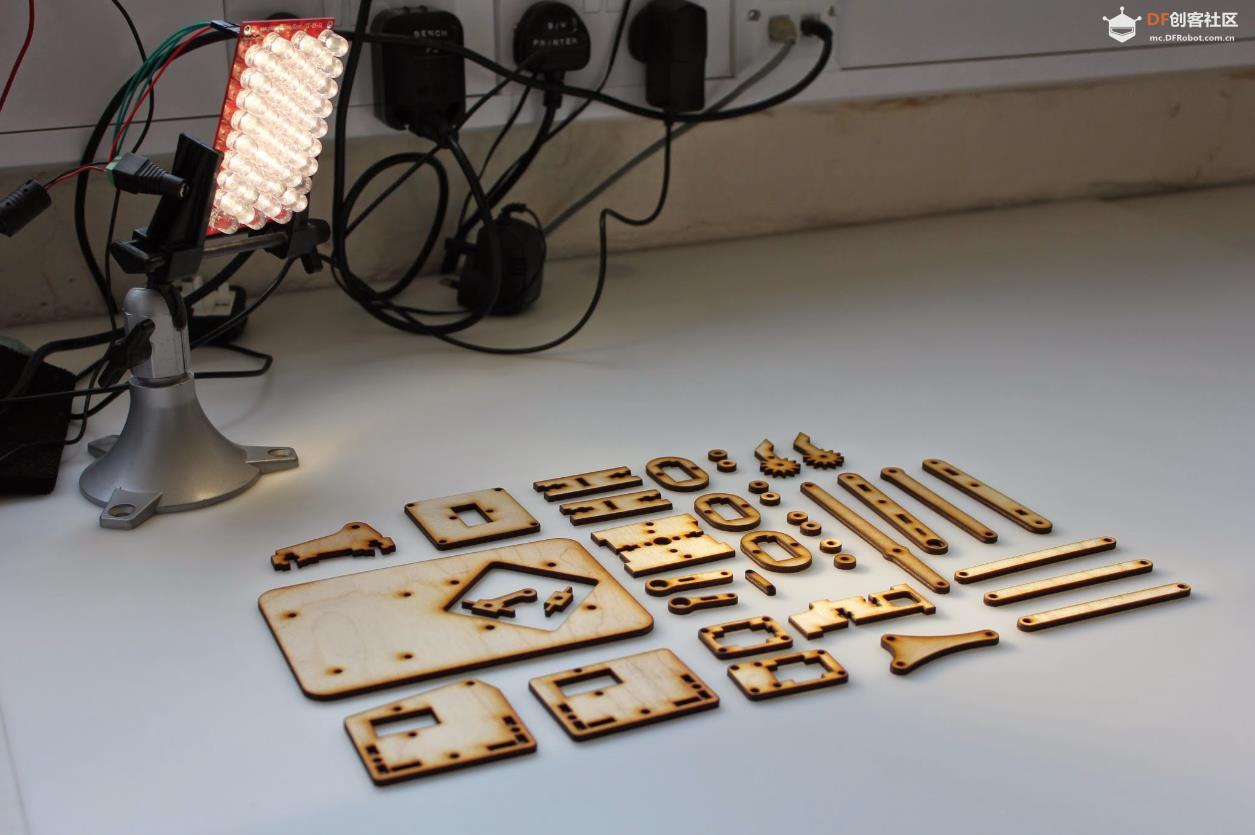     |
|
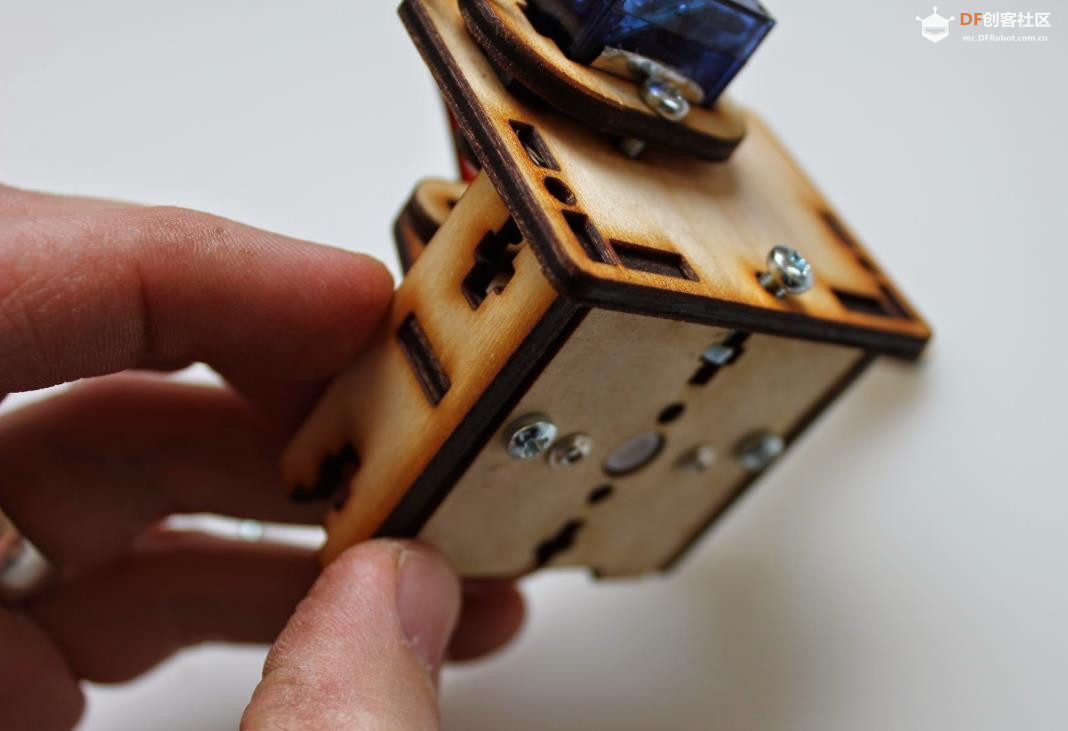
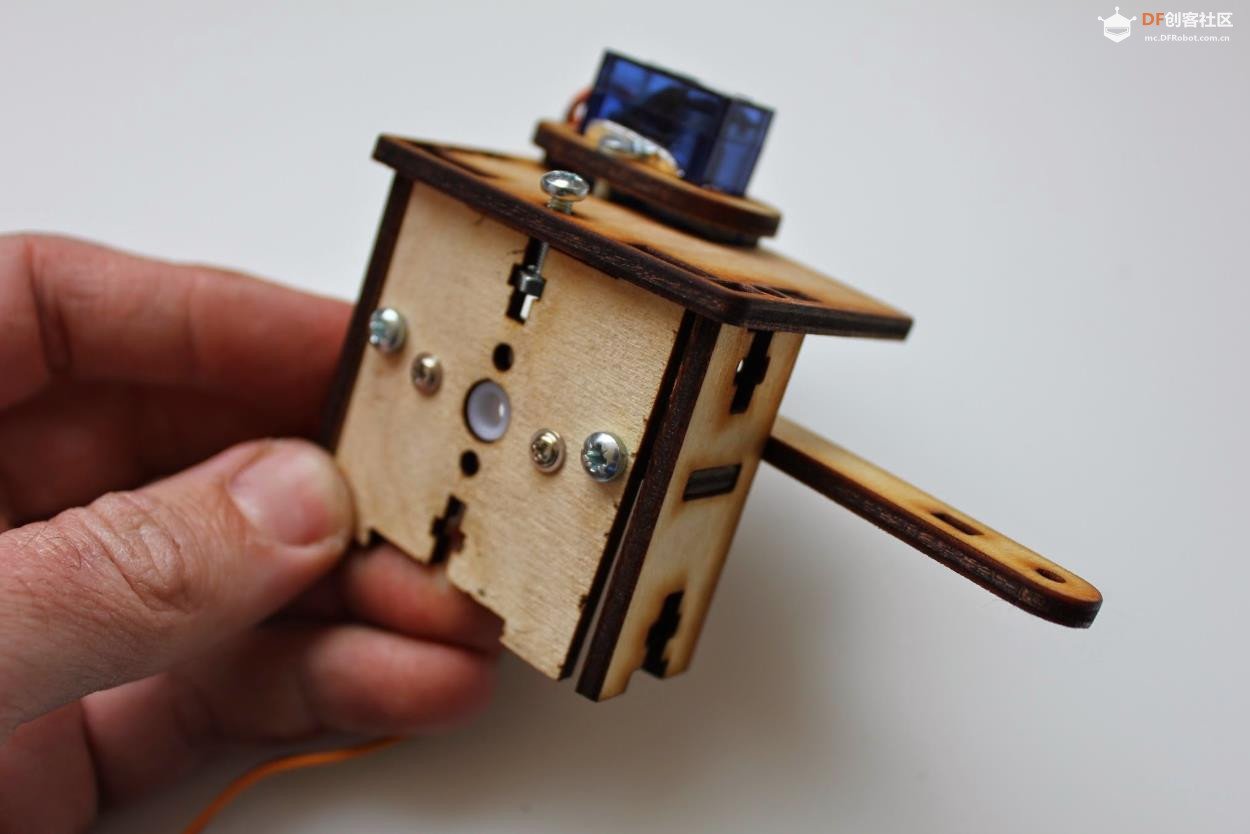
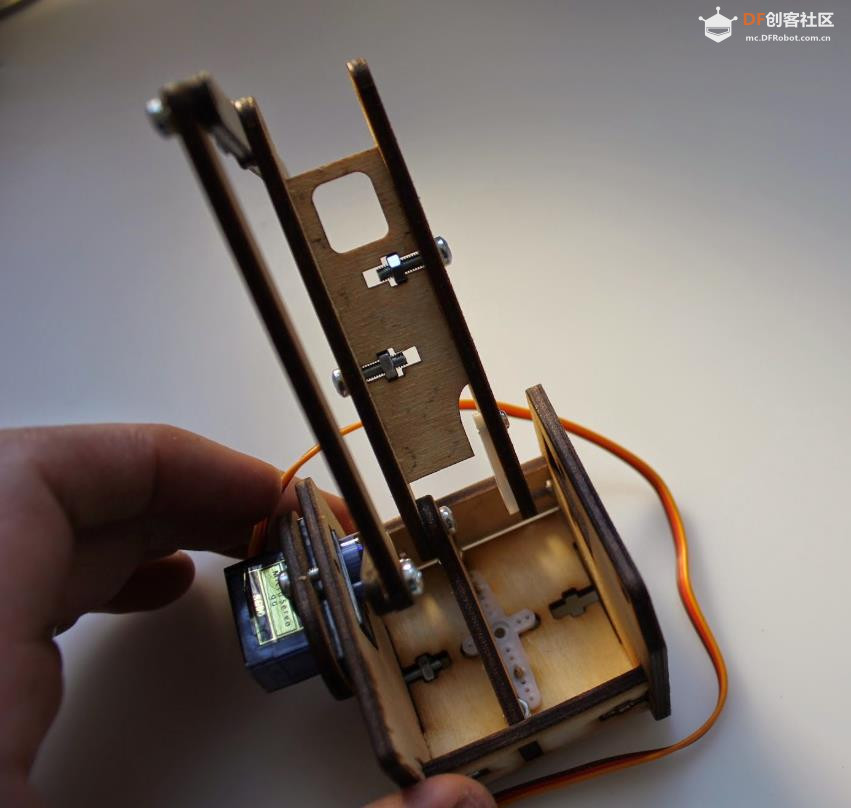
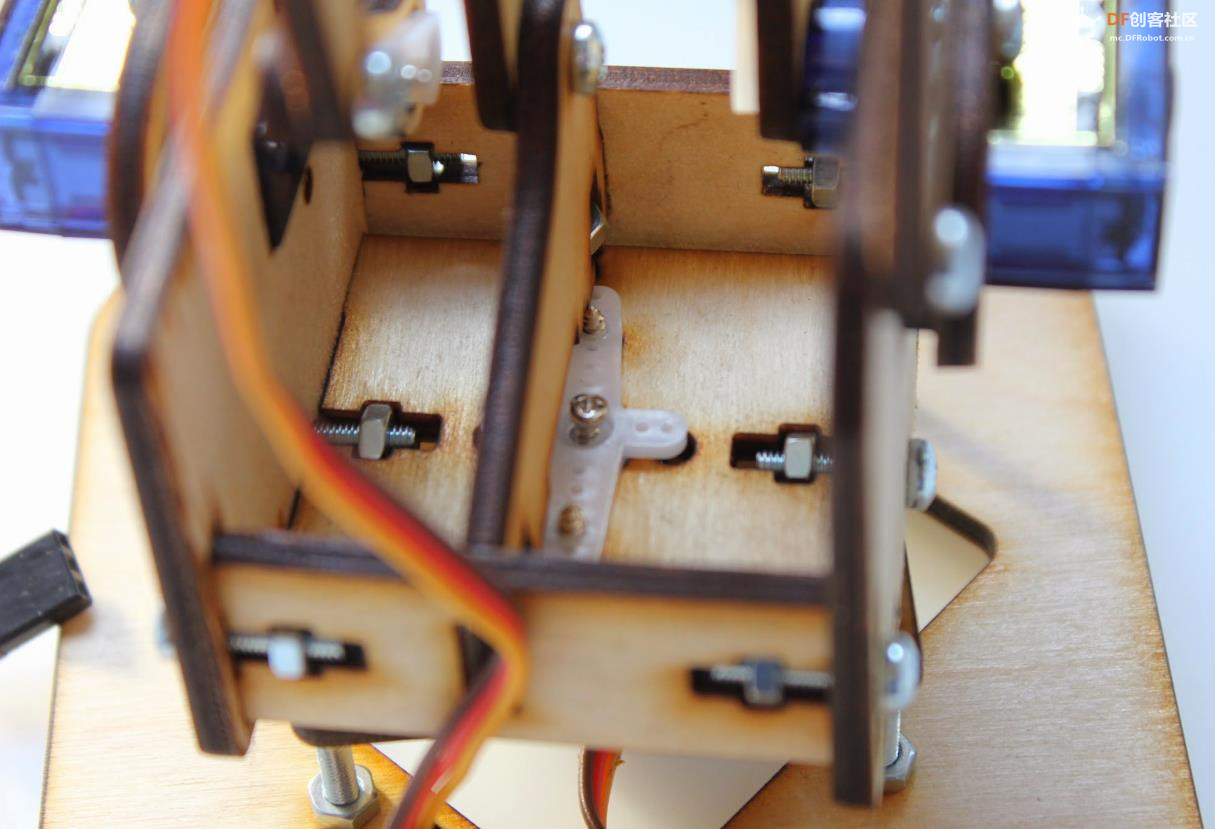
第 2 步:构建基础 基础可能是开始构建的最佳位置。否则,你以后就得处理反重力,这需要发明。 我们在这里使用的是木制版本的 MeArm。如果您用木头切割,请注意,我们用来节省硬件的自攻功能效果不佳,但您可以使用更长的螺钉和更多的螺母来弥补这一点。 取四个 20 毫米的螺丝和四个螺母。从电路板后部插入螺钉,然后将螺母拧上大约一半。握住方形部分,使孔与螺钉对齐,然后将末端拧入孔中,直到它们与方板的顶部齐平。对所有四个螺钉完成此作后,您就可以将螺母拧紧到底板上。 在底座的角落添加粘脚,这样螺丝就不会划伤您正在处理的表面。 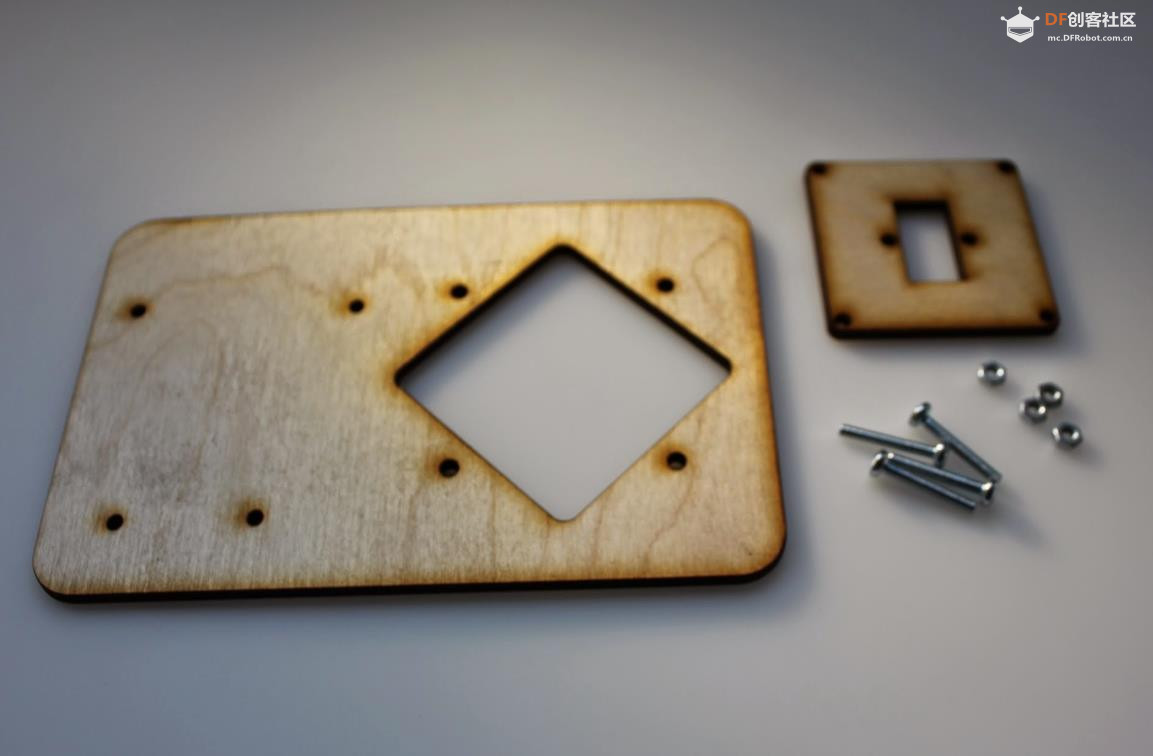  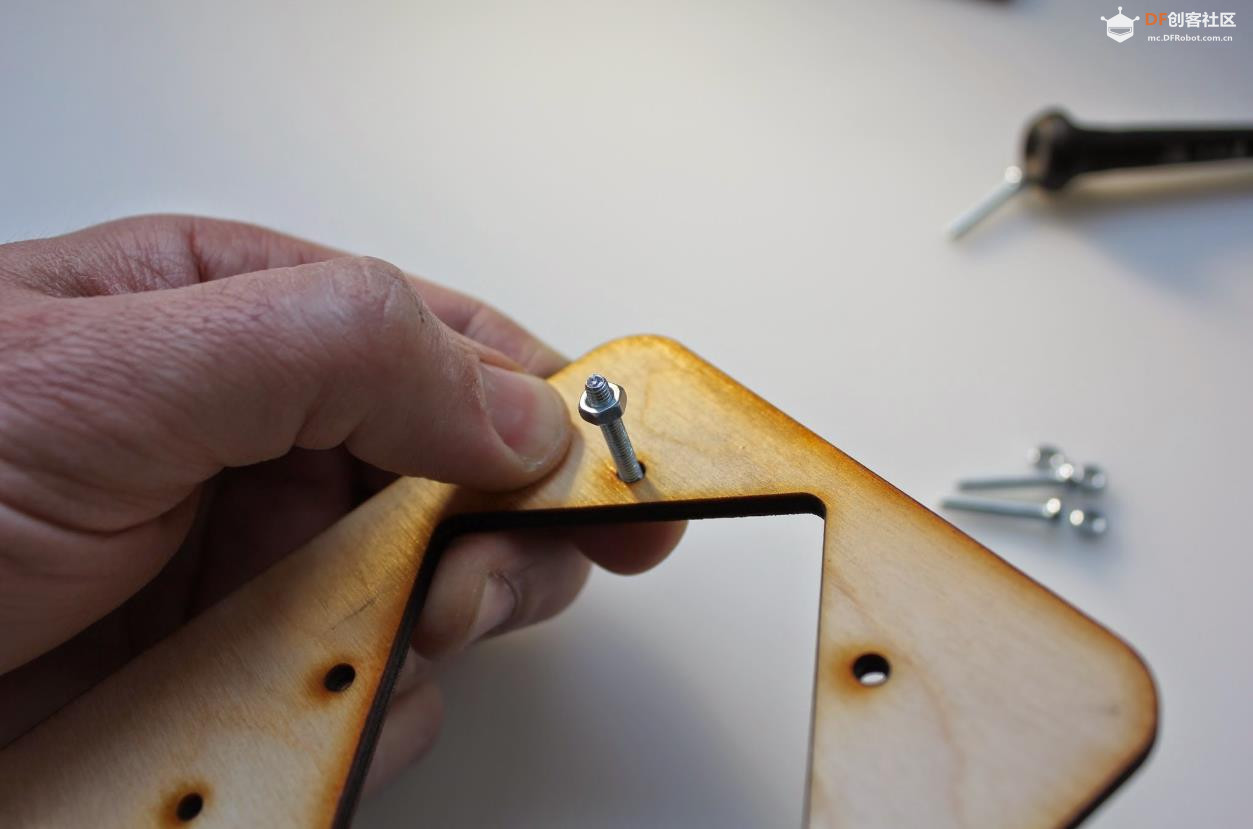 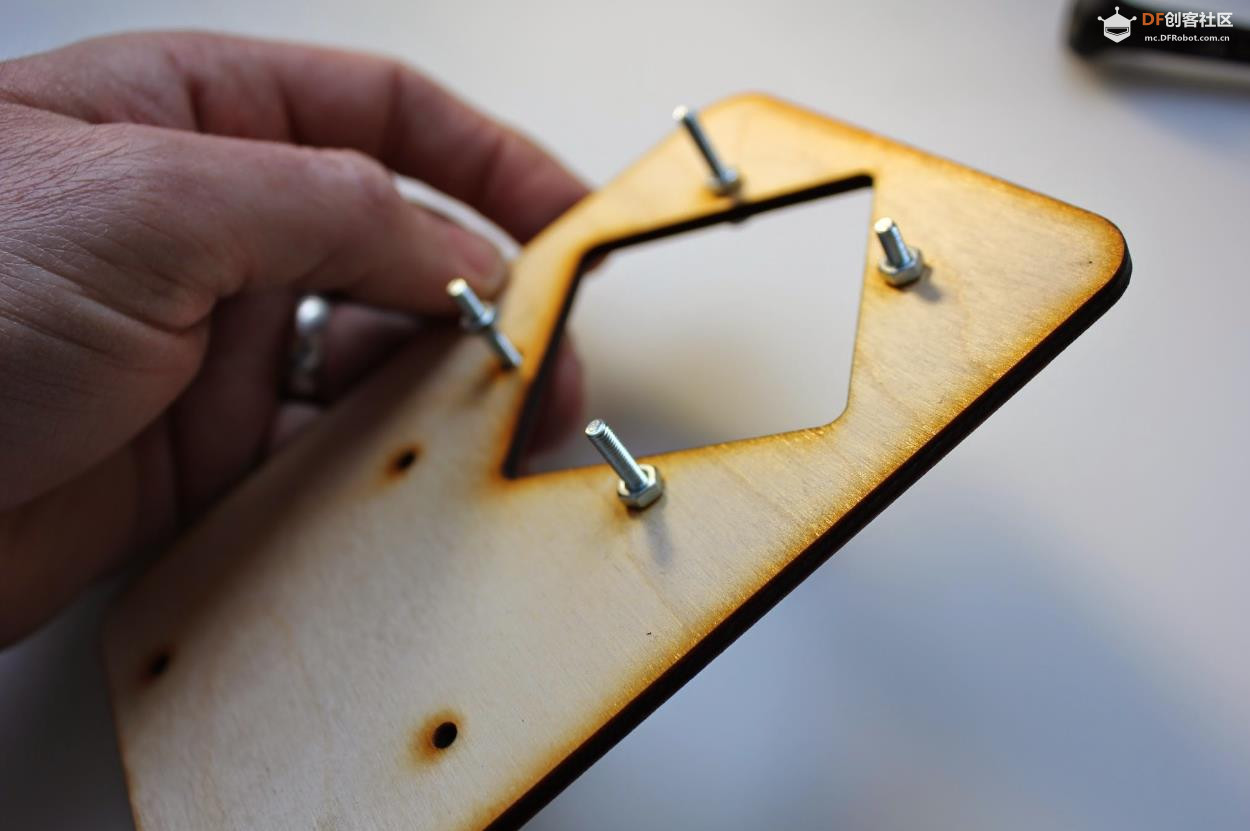 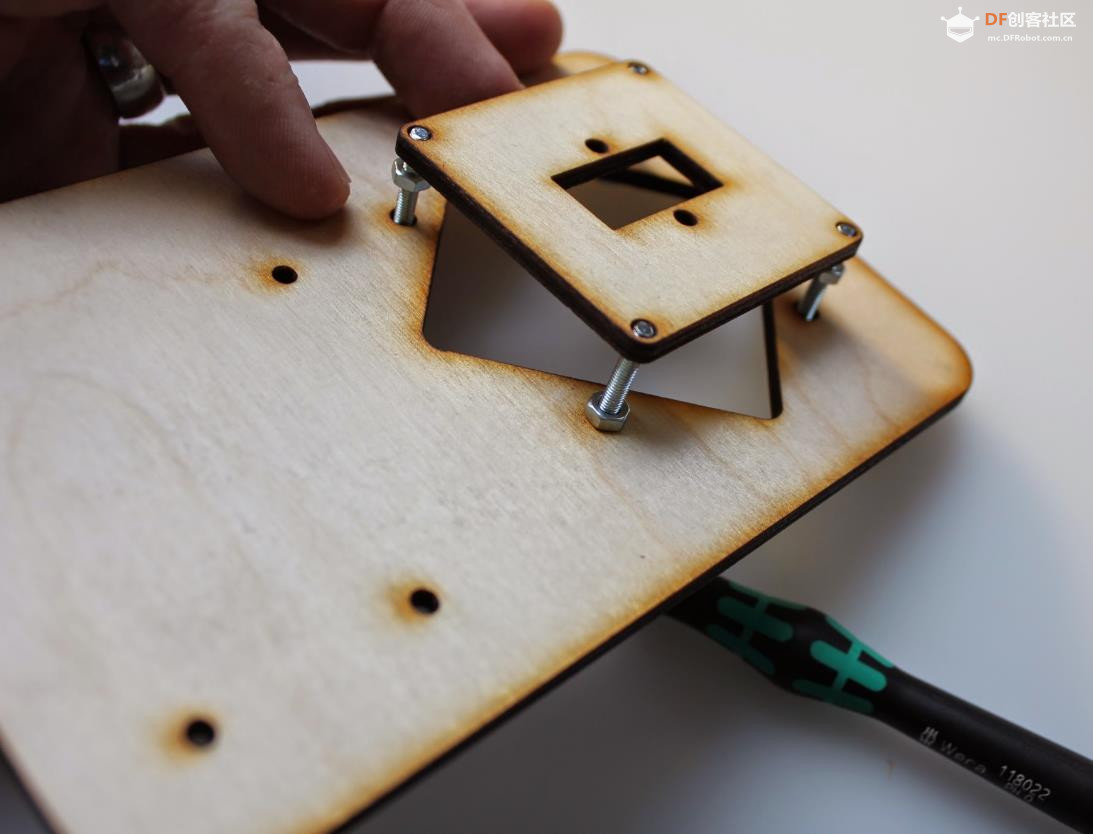 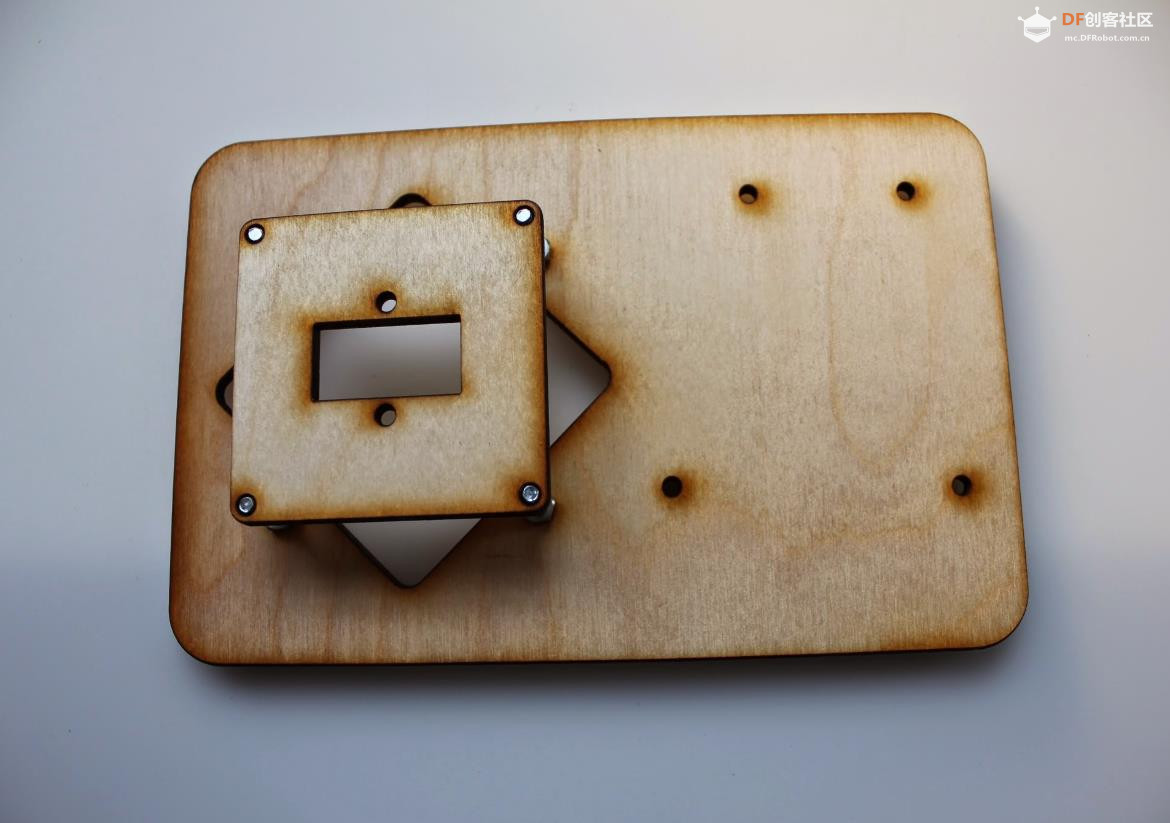 |
|
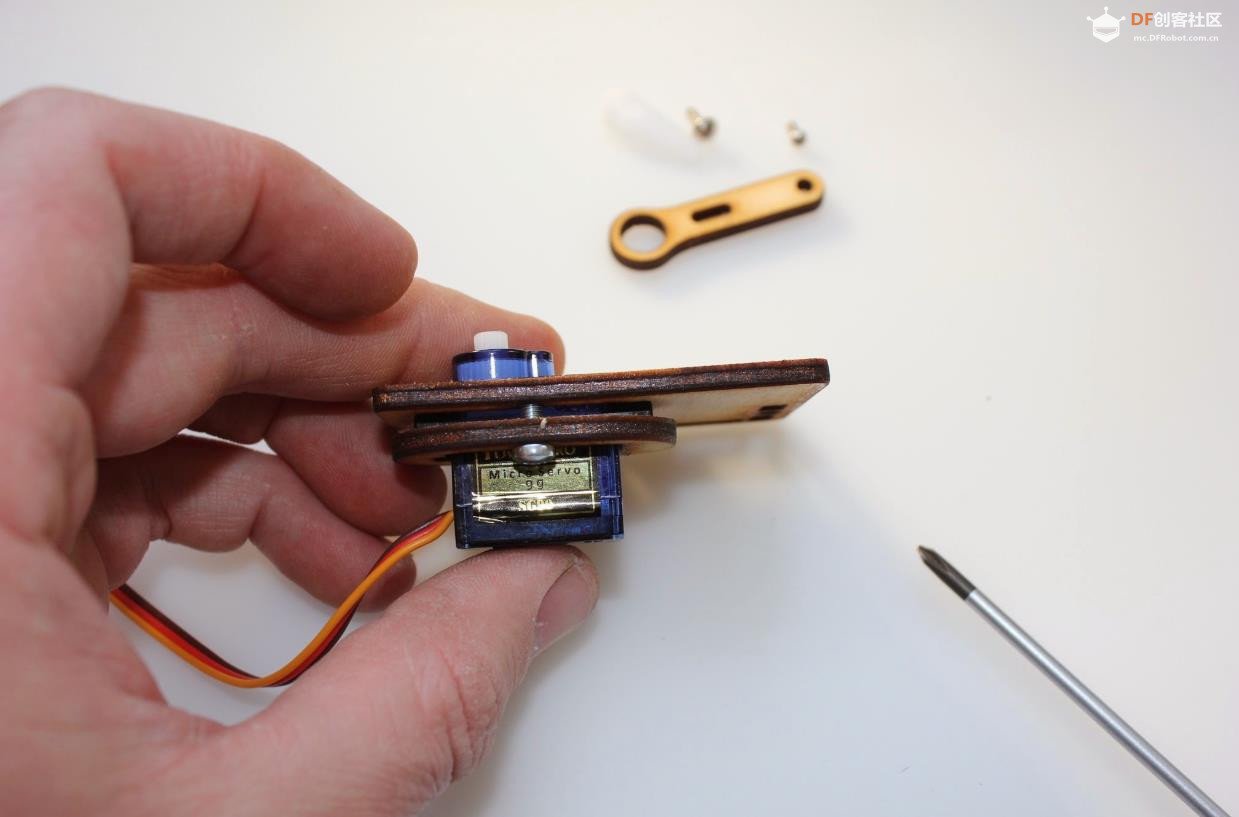
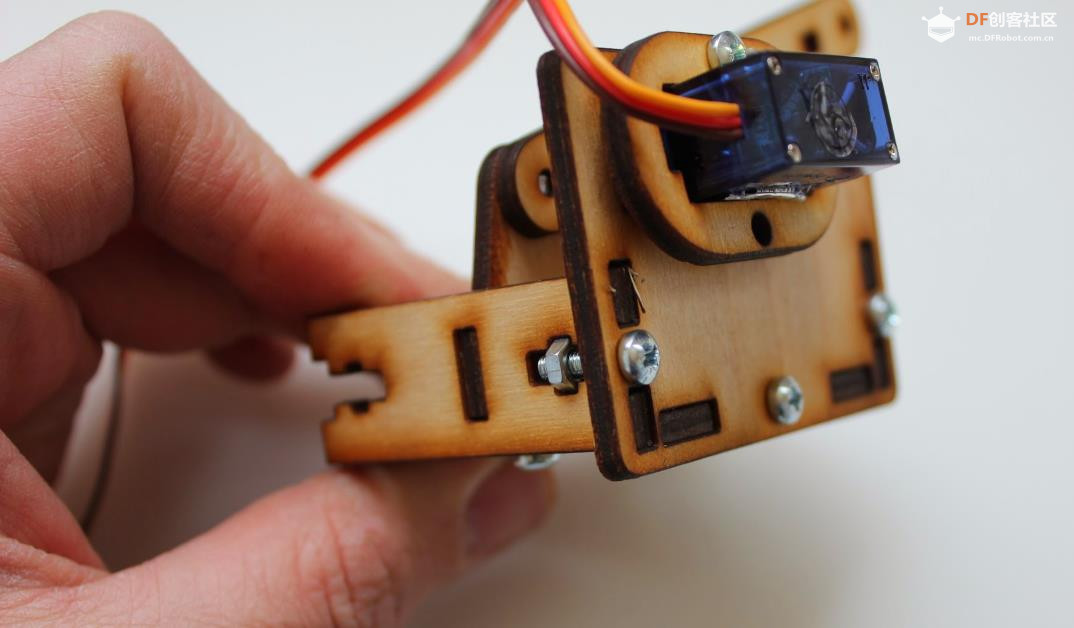
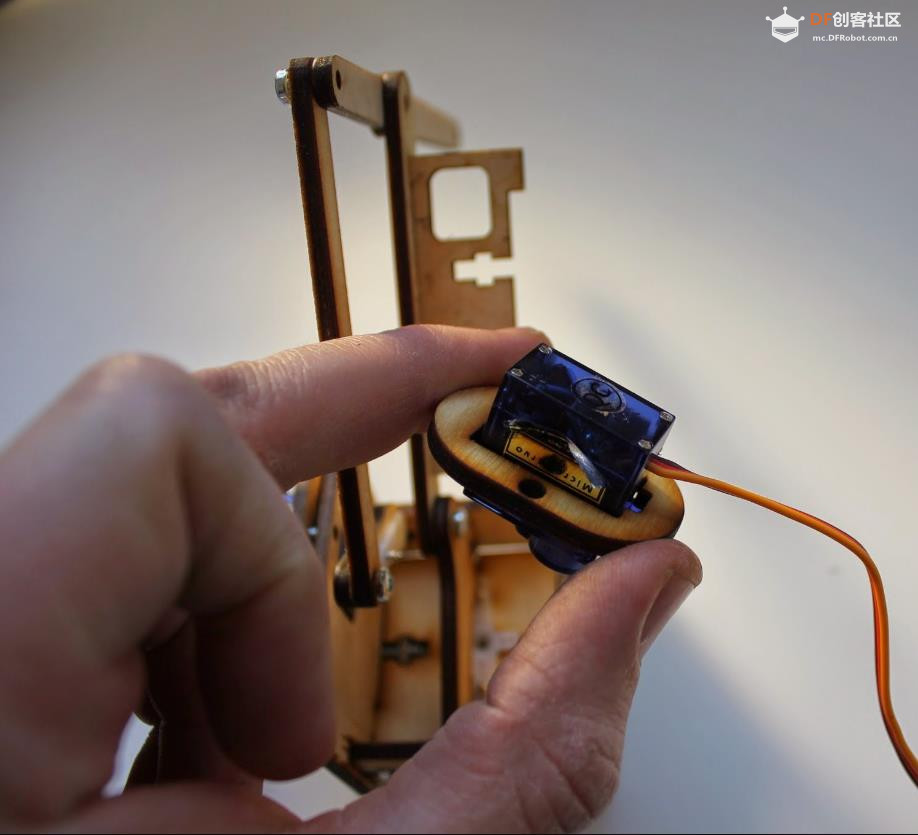
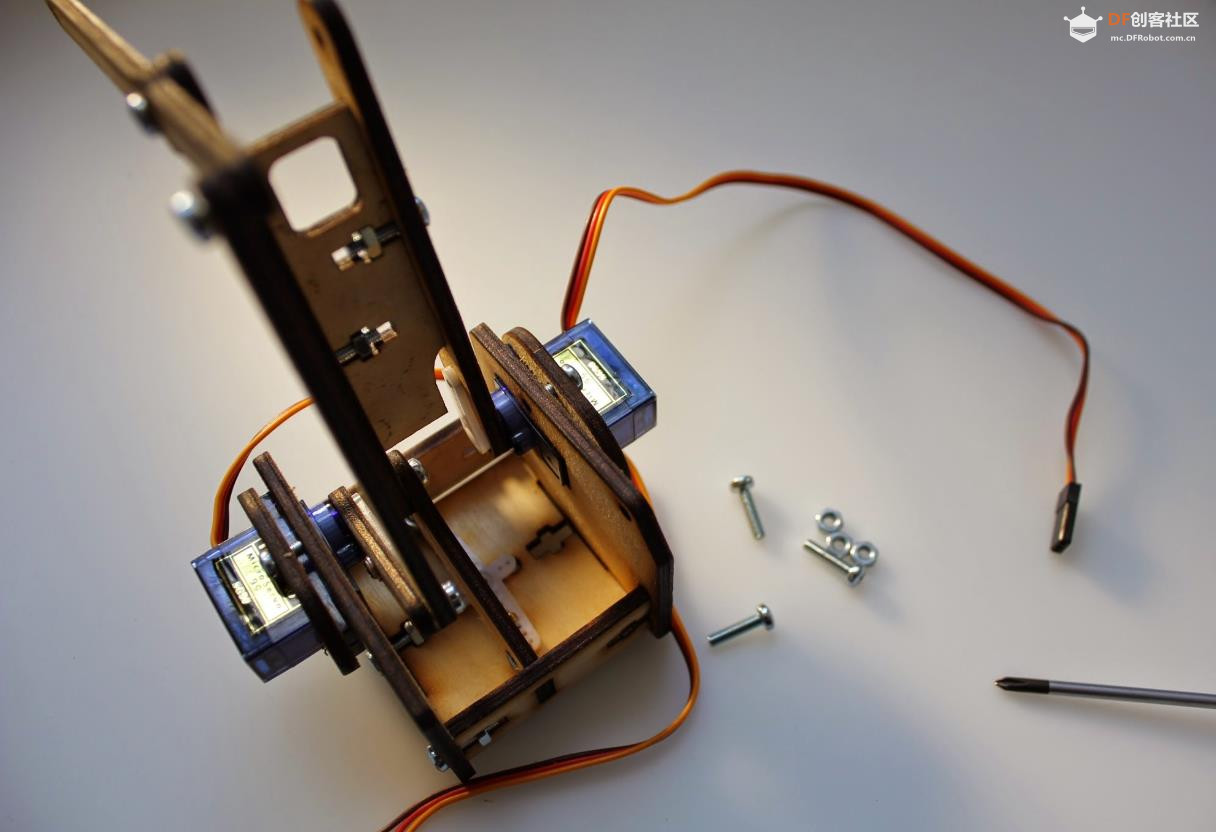
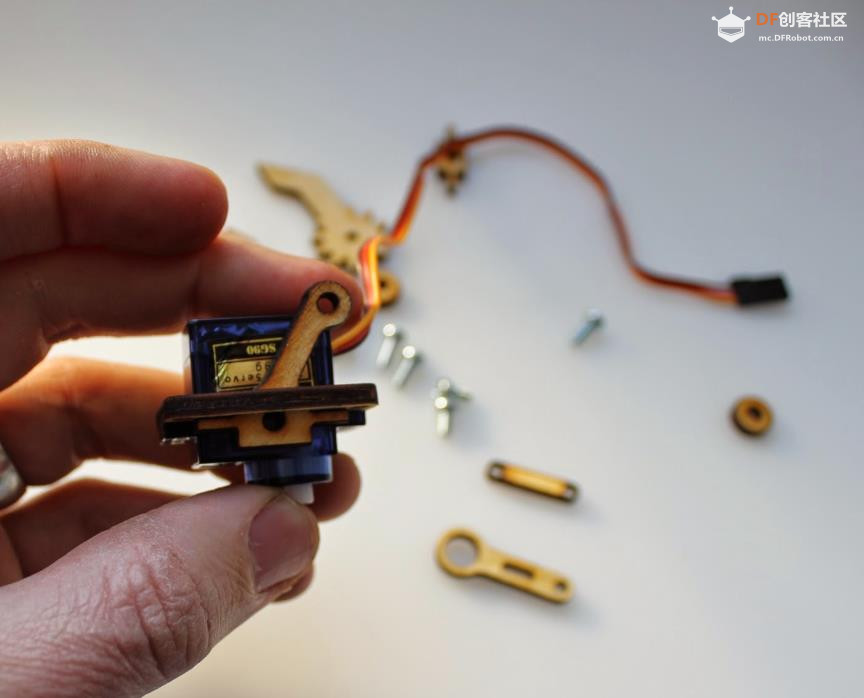
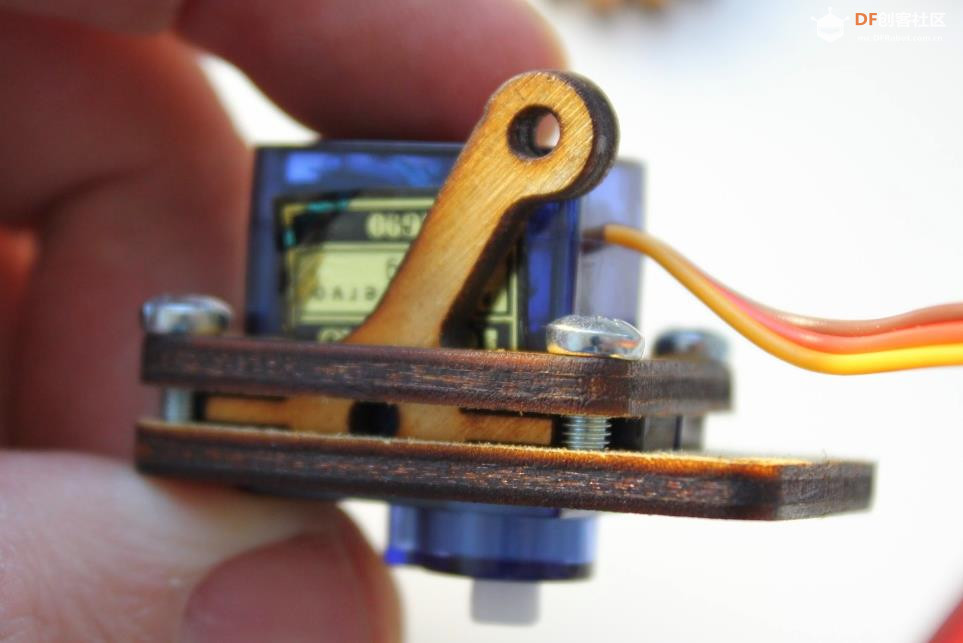
第 3 步:第一台伺服器! 现在我们添加第一个 servo。 这里使用的方法也将用于稍后再连接两个 servos。我们所做的是在伺服器的底部周围放置一个项圈,注意项圈一侧的槽口,这样您的控制线就不会被夹住。使用伺服环下侧的两个 8 毫米螺钉,将它们拧入您刚刚连接到底板的方形部分。螺钉应自行攻击,直到与方板大致齐平。不要过度拧紧,否则可能会折断衣领。在亚克力中,这种自攻丝效果很好。在木头里没有那么多...... 我们稍后会担心伺服器的方向,因为我们还没有将其连接到下一个零件。 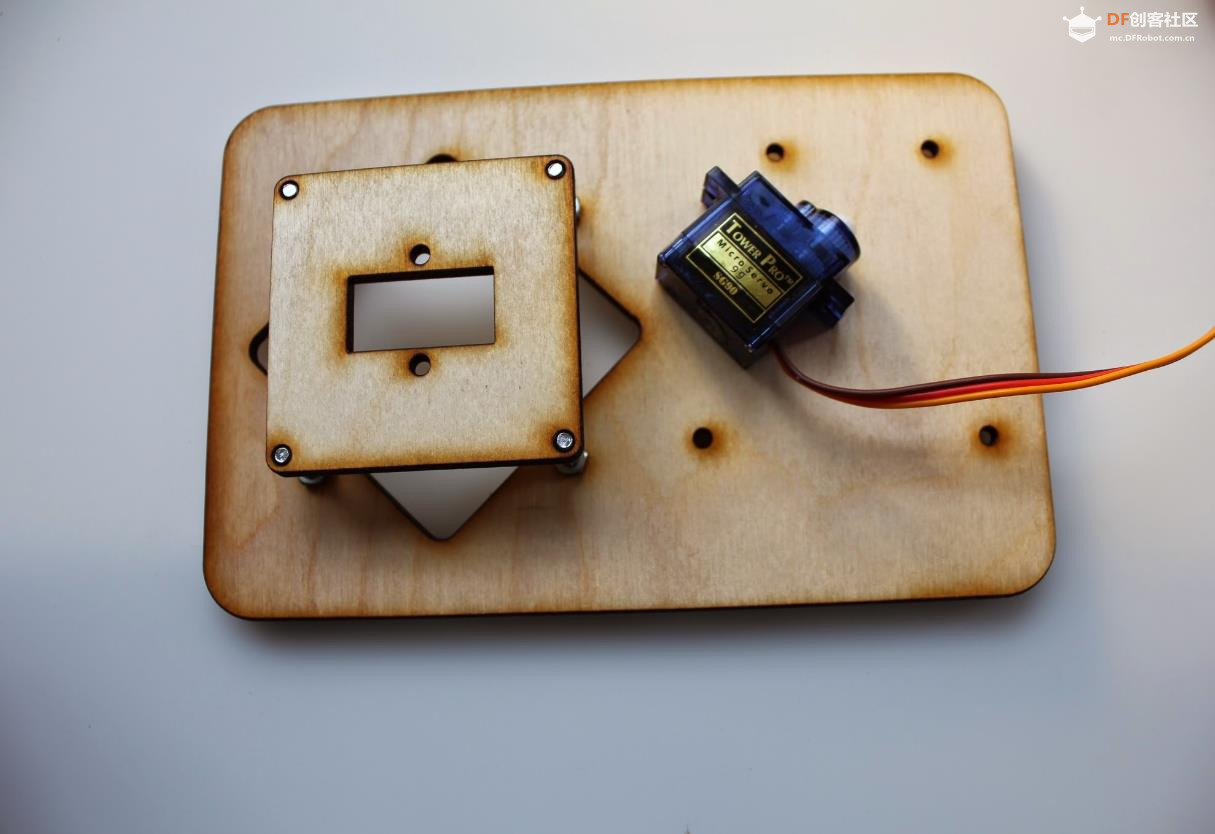 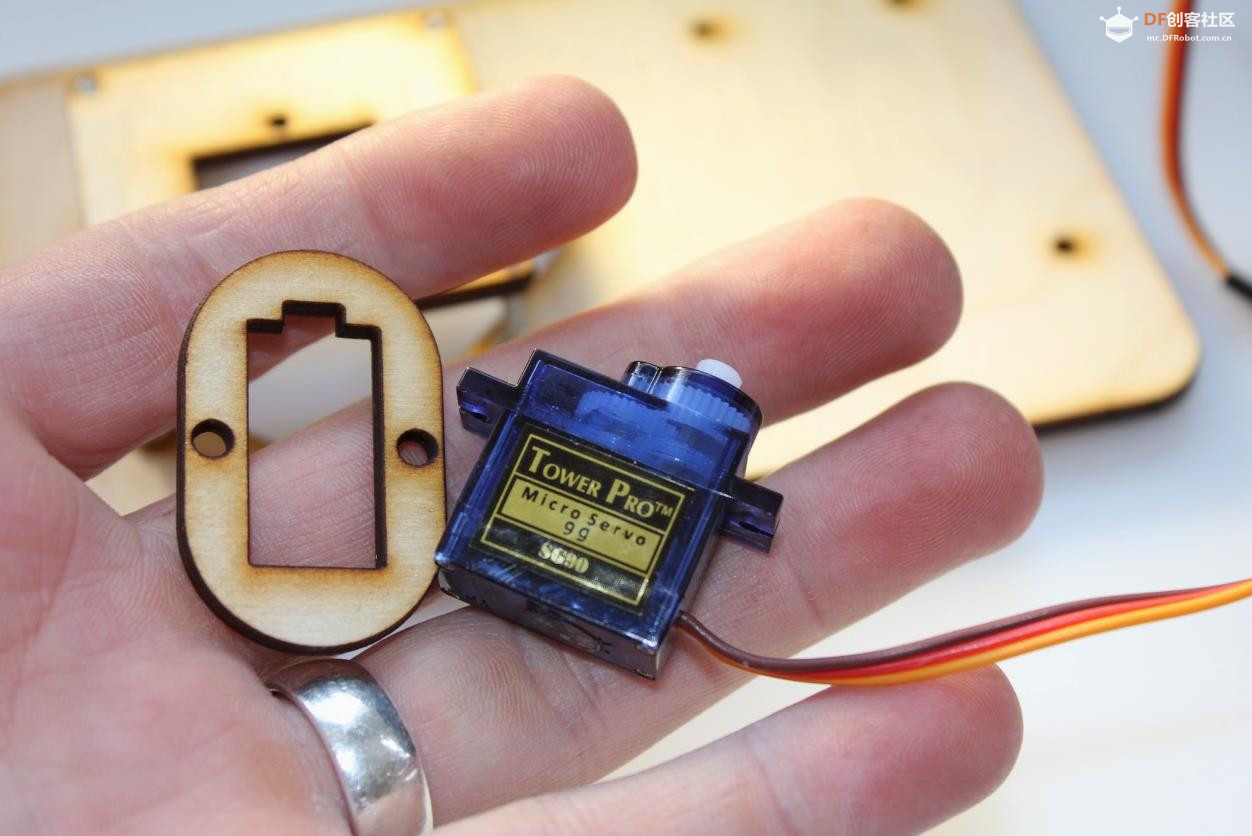 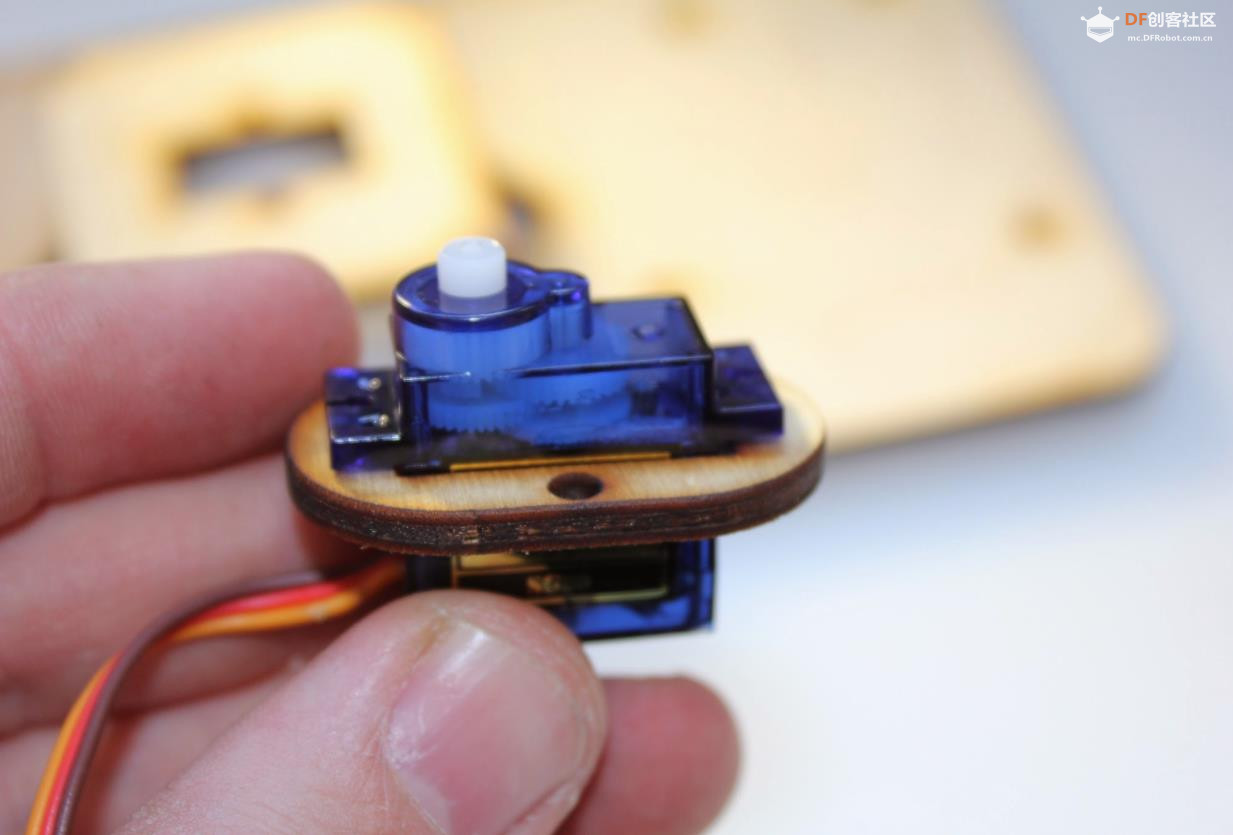 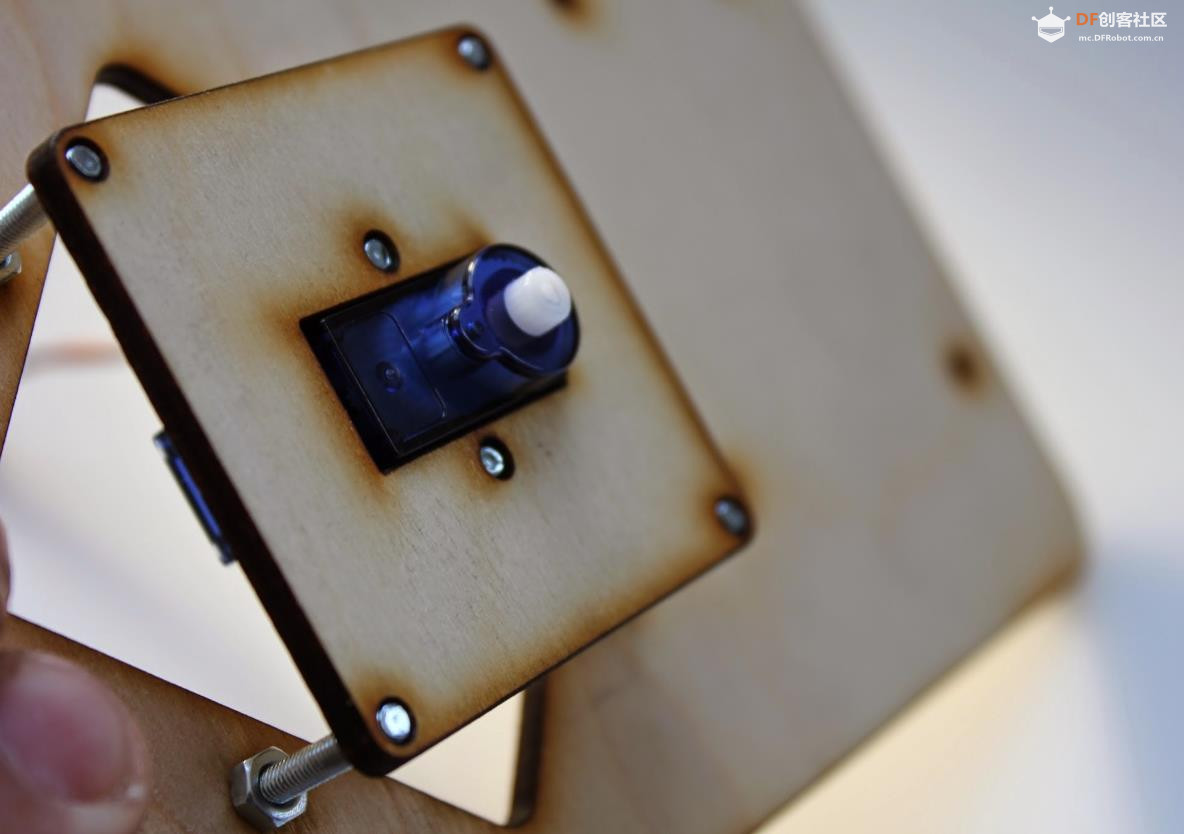 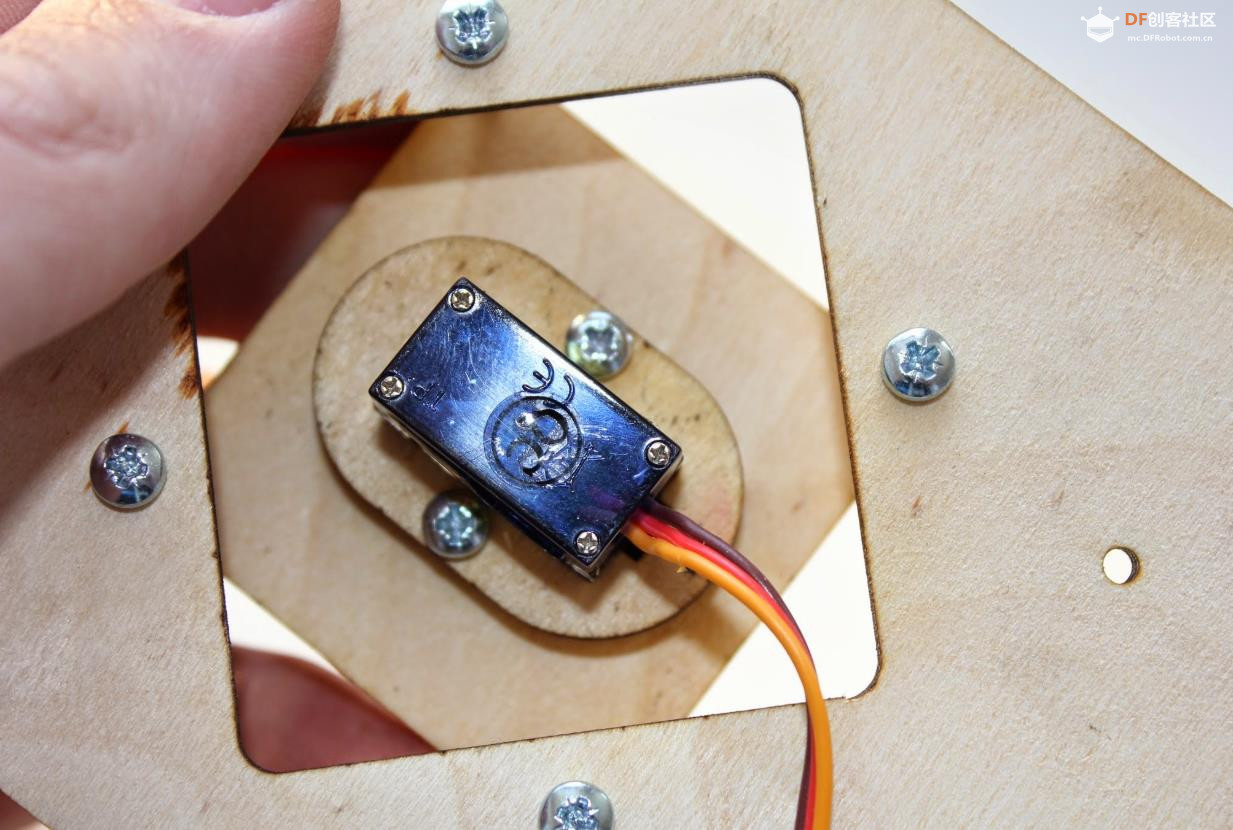 |
|
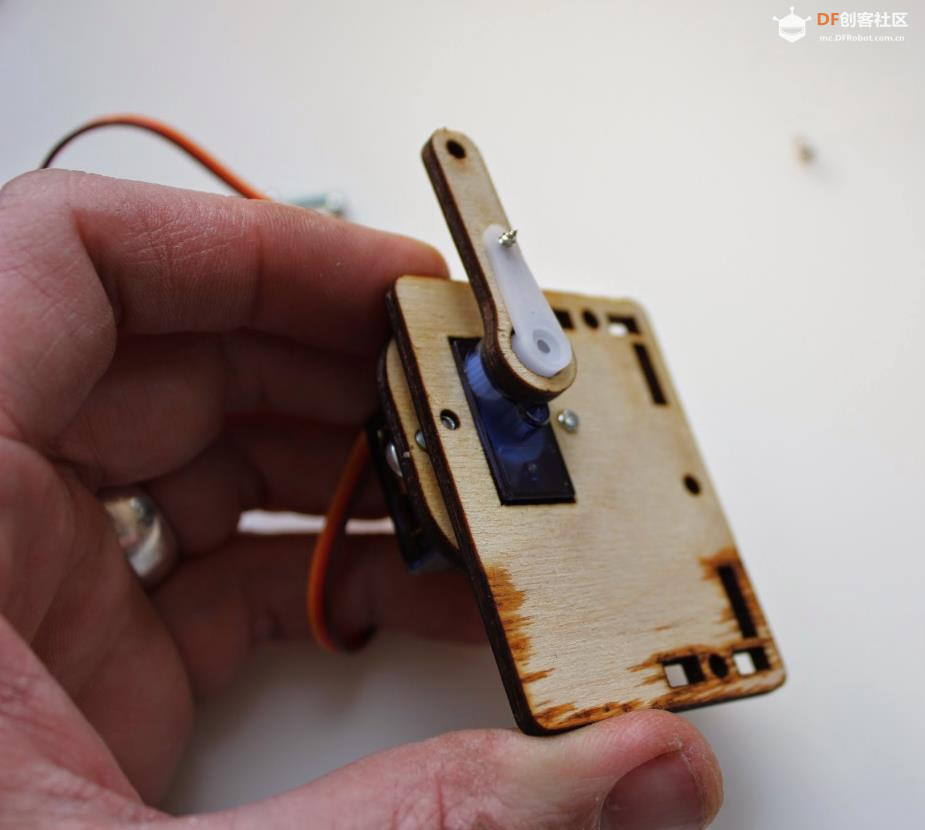
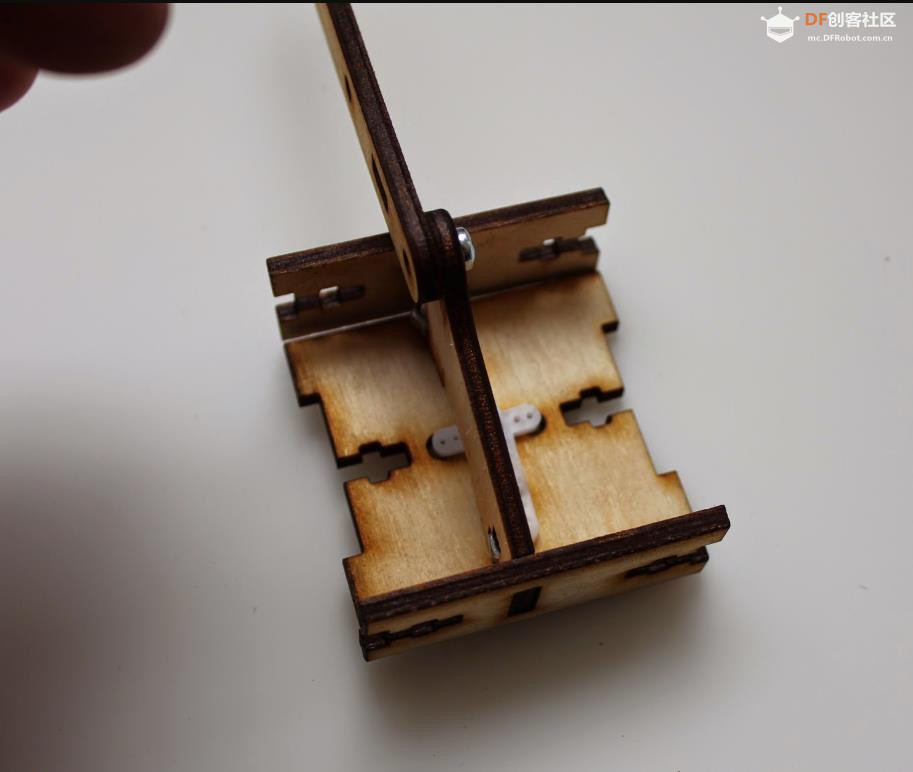
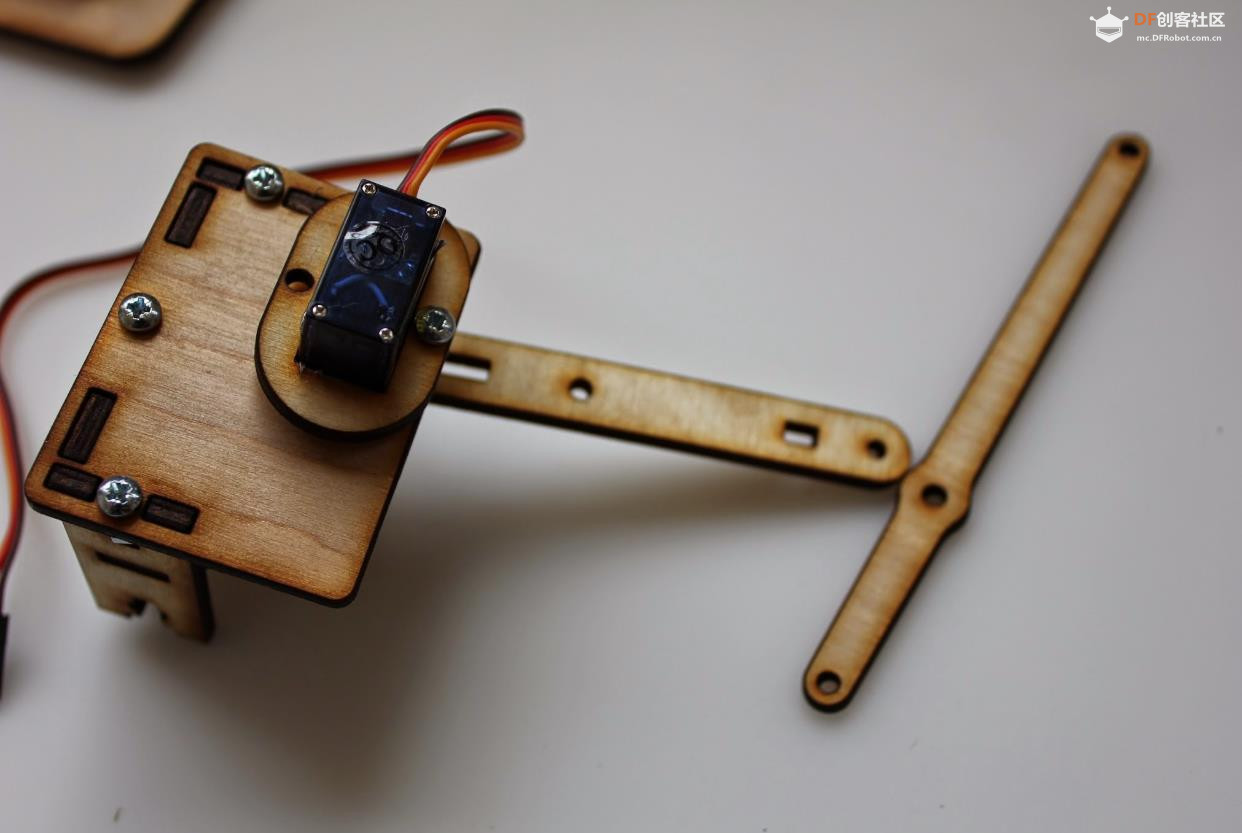
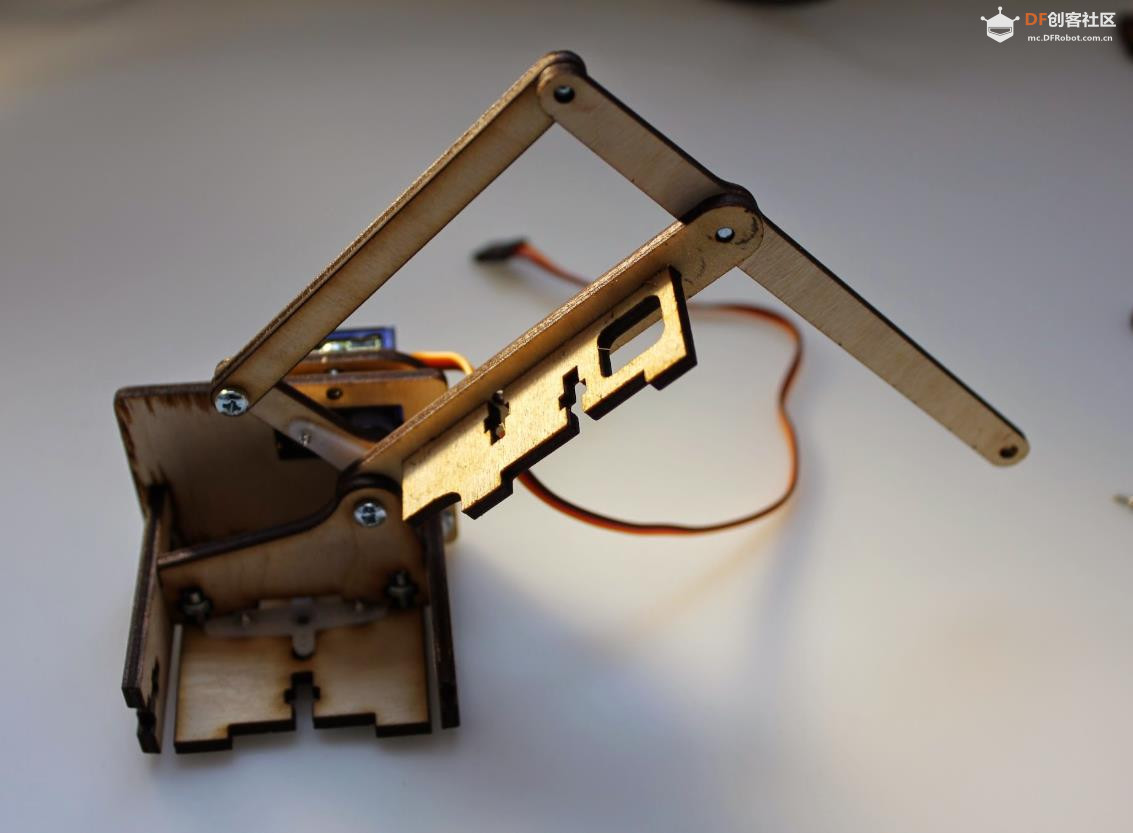
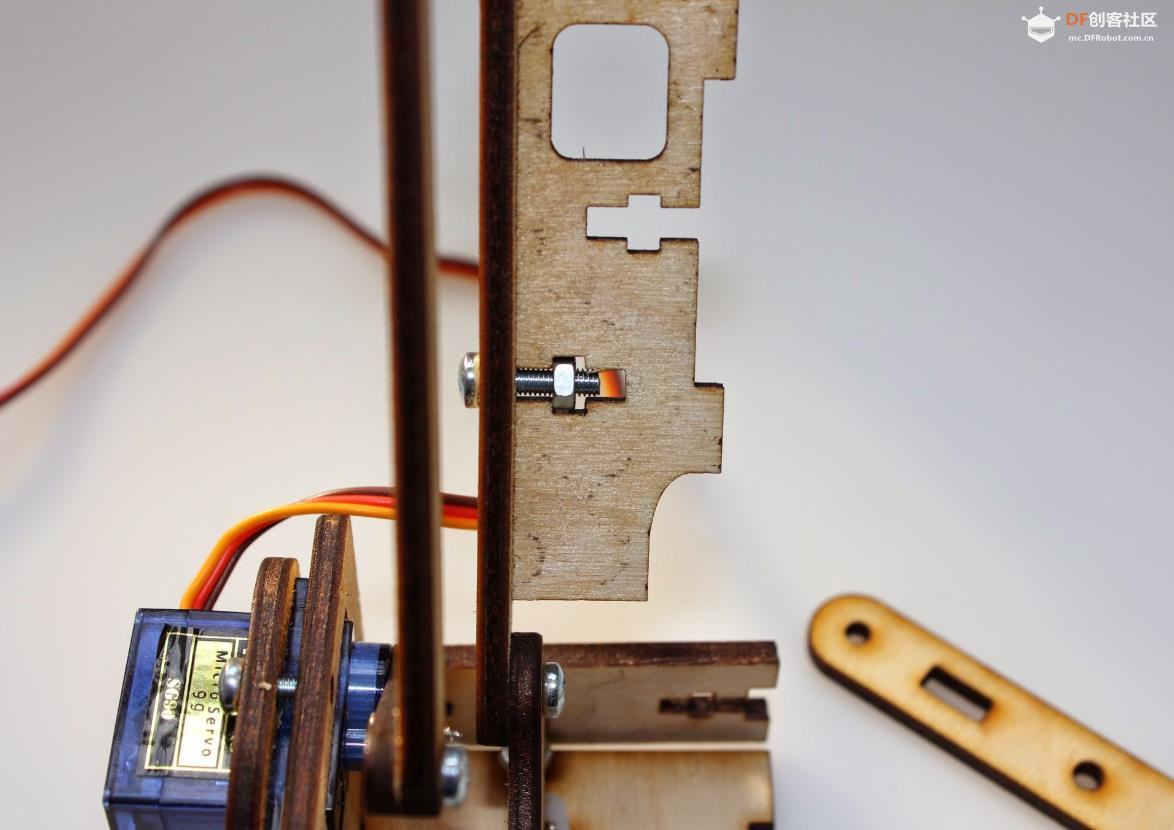
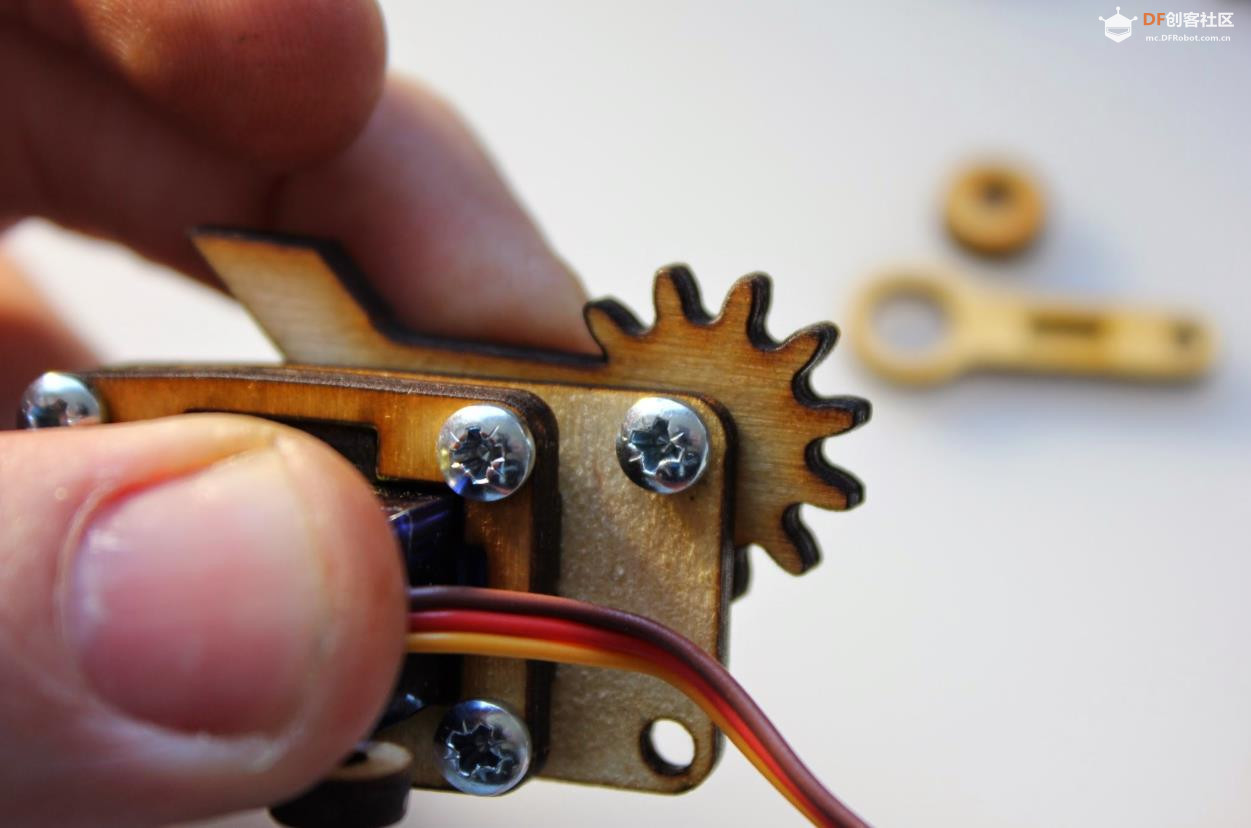
第 4 步:锻炼腰部 现在我们构建我认为称为腰部的部分。使用伺服器随附的十字“喇叭”,并使用伺服器包中的两个长螺钉进行连接。从板的底部拧入伺服喇叭。您现在应该有一个带有喇叭和伸出两个尖刺螺钉的板子。 现在我们要添加中心部分。这使用了我们将再次使用的另一种方法。从电路板的底部插入两个 12 毫米的螺钉并拧上两个螺母,使它们刚好打开。仔细看看这一步的图片。下一块顶部的孔应该在我们将要考虑的前面,而你刚刚穿过上一块的孔应该在左侧。 将中央部分的槽口对齐并拧紧螺母以将其拧紧到底座部分。它在这里可能会偏离对齐,所以要小心一点。考虑到这一点,如果我们将喇叭的位置旋转 90 度并移除底座上的固定位置,我们可能应该增加一个缺口。很抱歉在我进行时做笔记,但如前所述,这是一项正在进行的工作,应该作为 v0.3 的构建! 现在进入 Bicep 的第一部分。这应该在左侧,孔朝向最靠近底部的工件中间。使用从右侧插入的 6 毫米螺钉穿过中央部分,自攻到二头肌部分。真的应该给这些数字!拧紧到足以让部件自由移动,摆动最小。 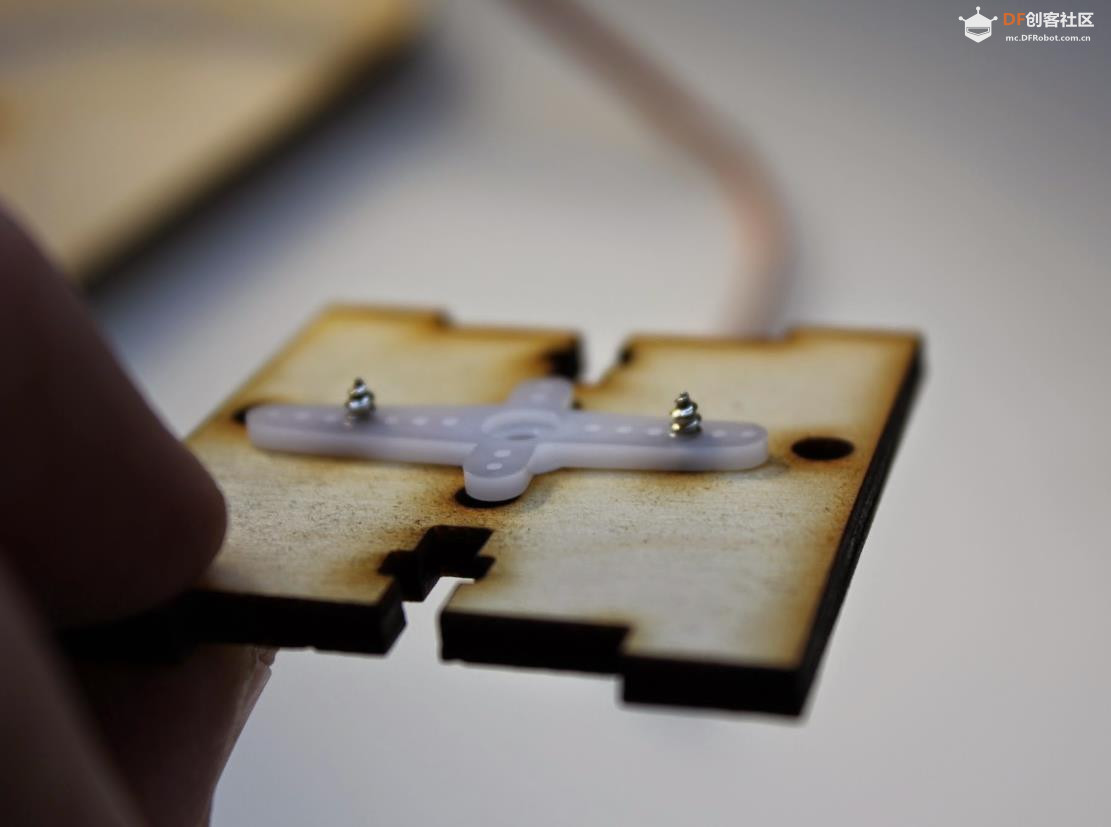 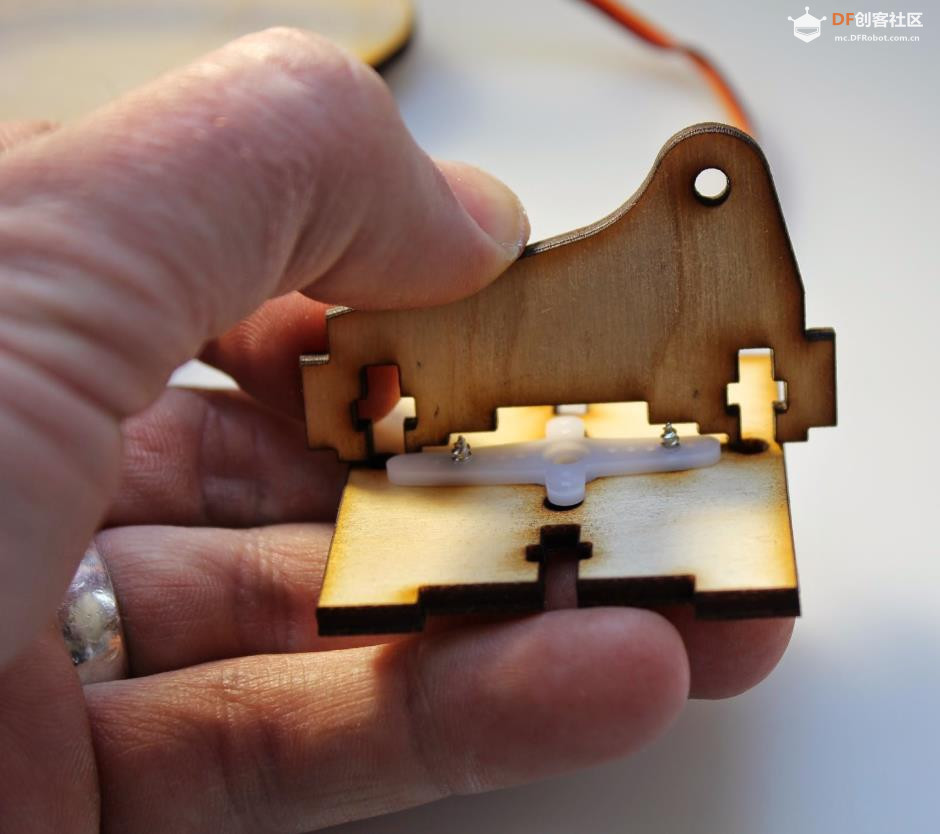  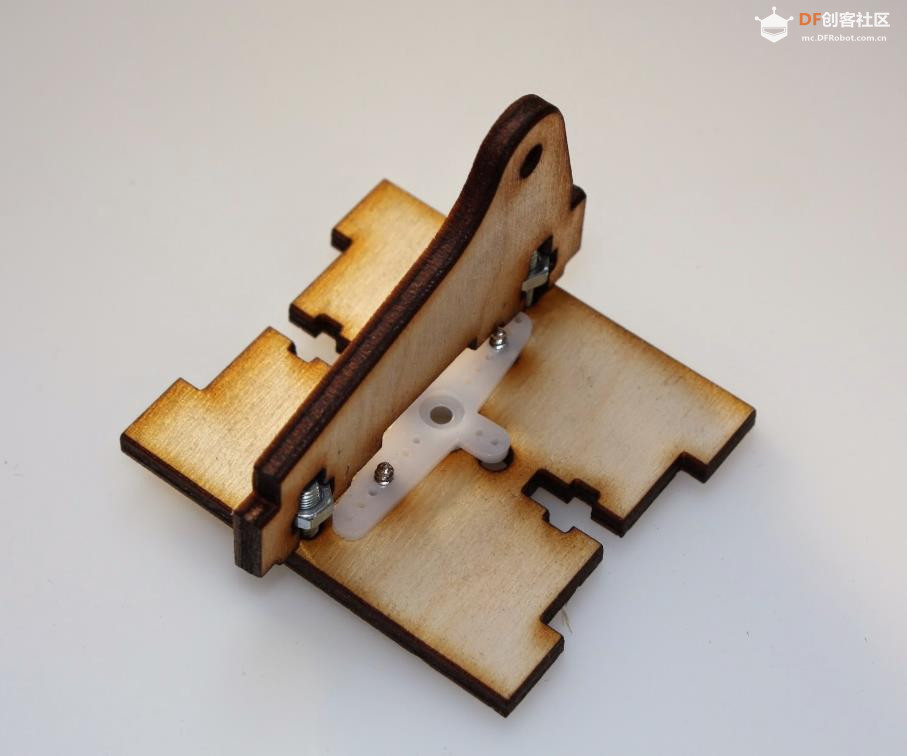 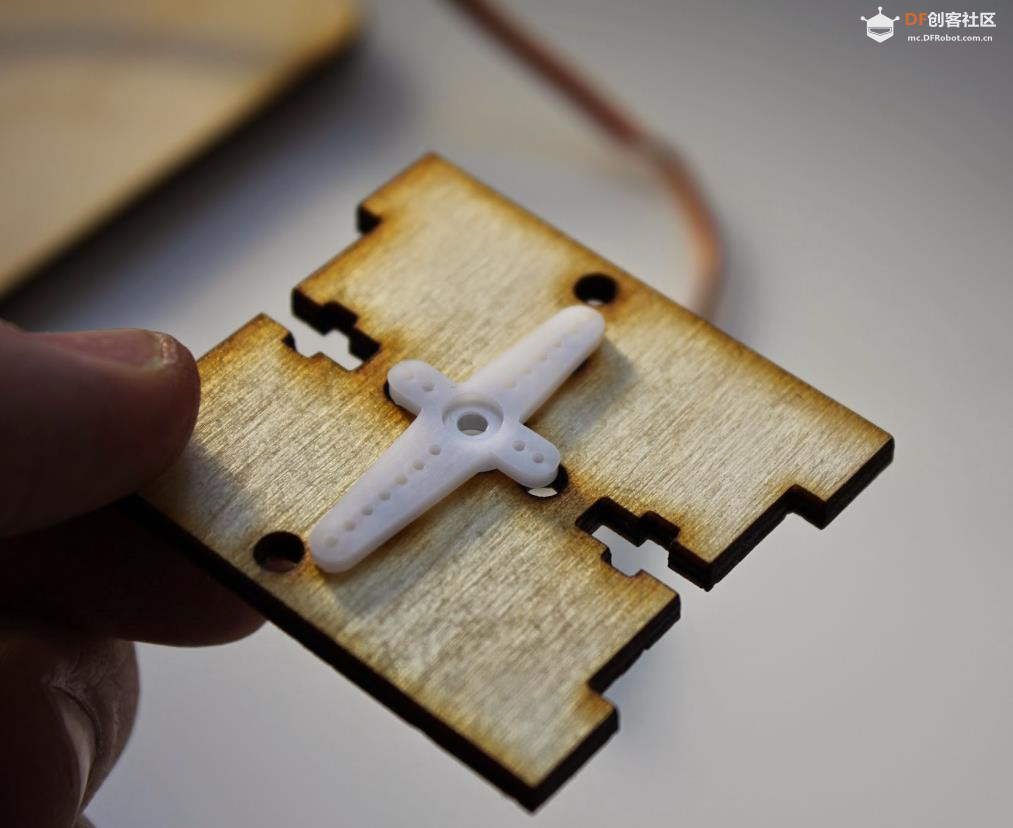  |
|
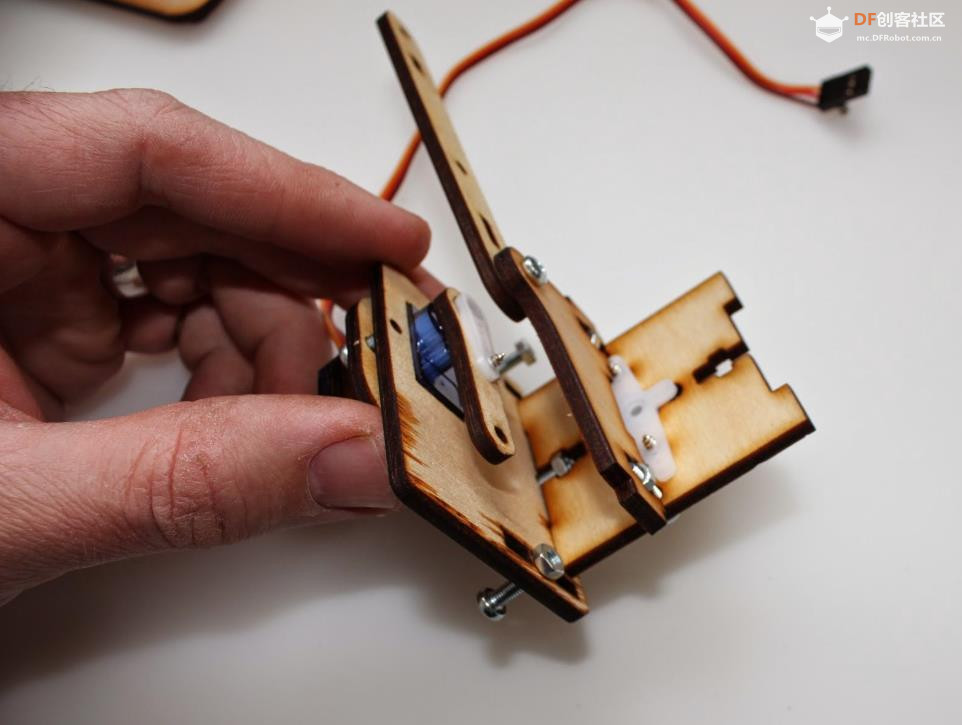
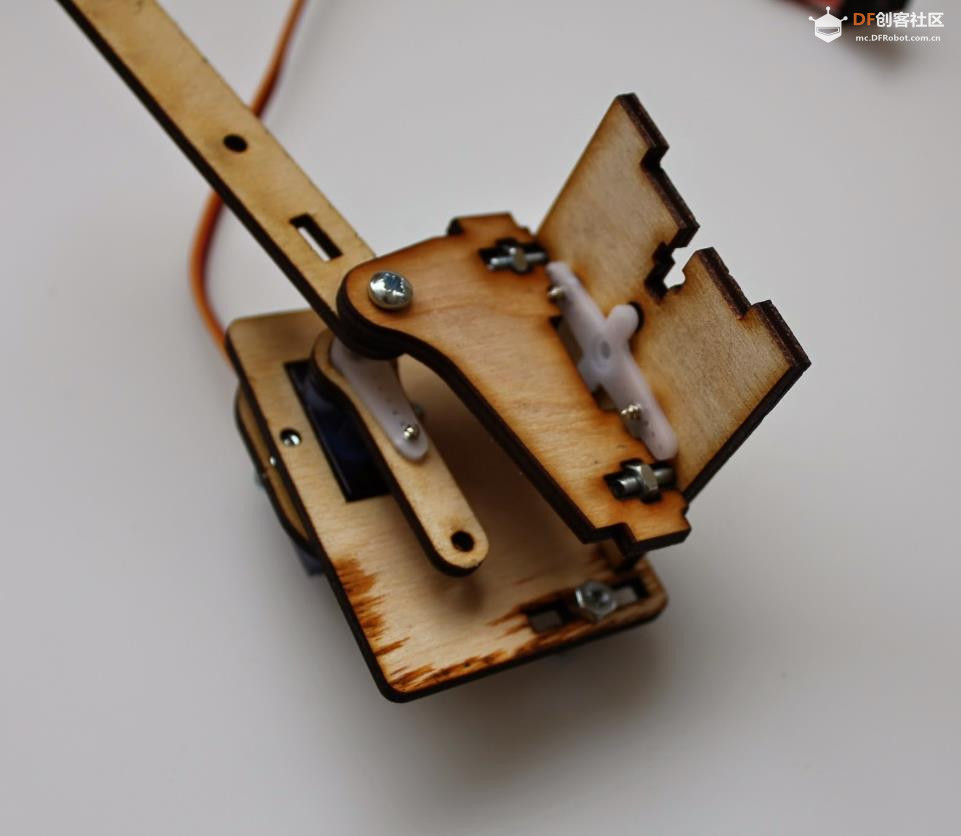
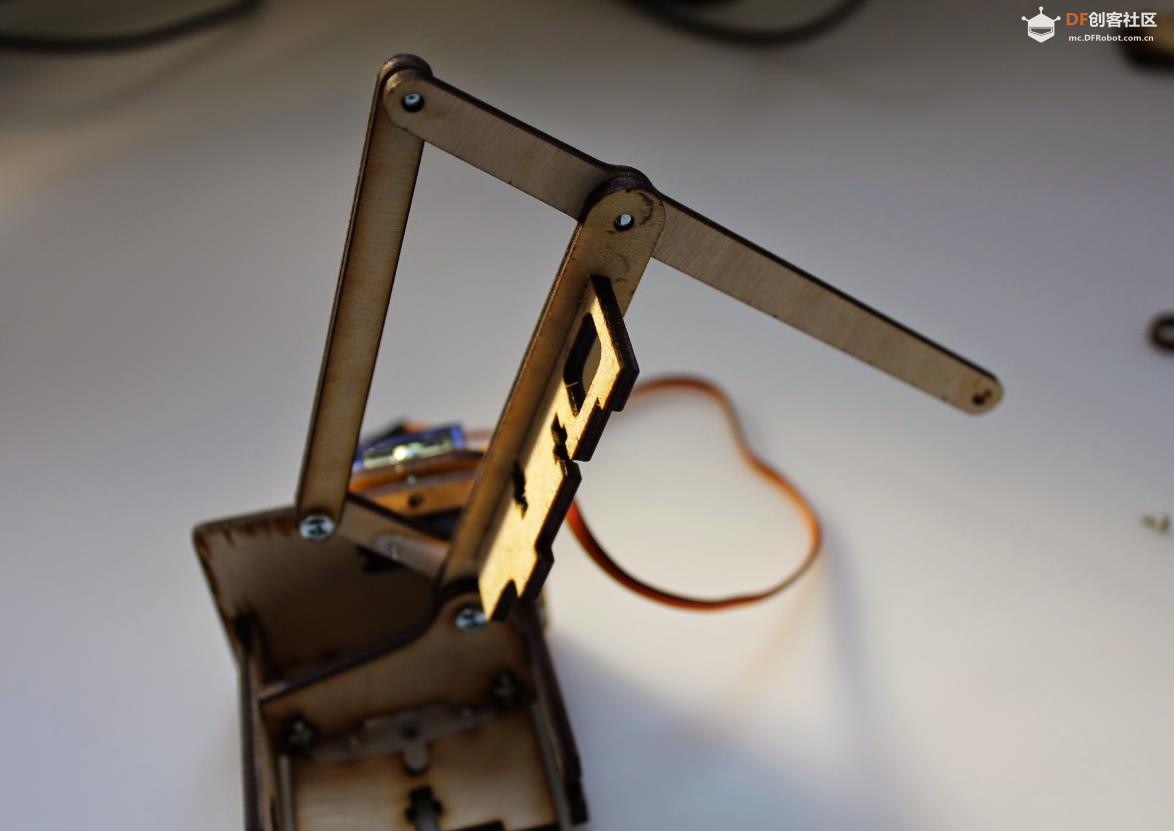
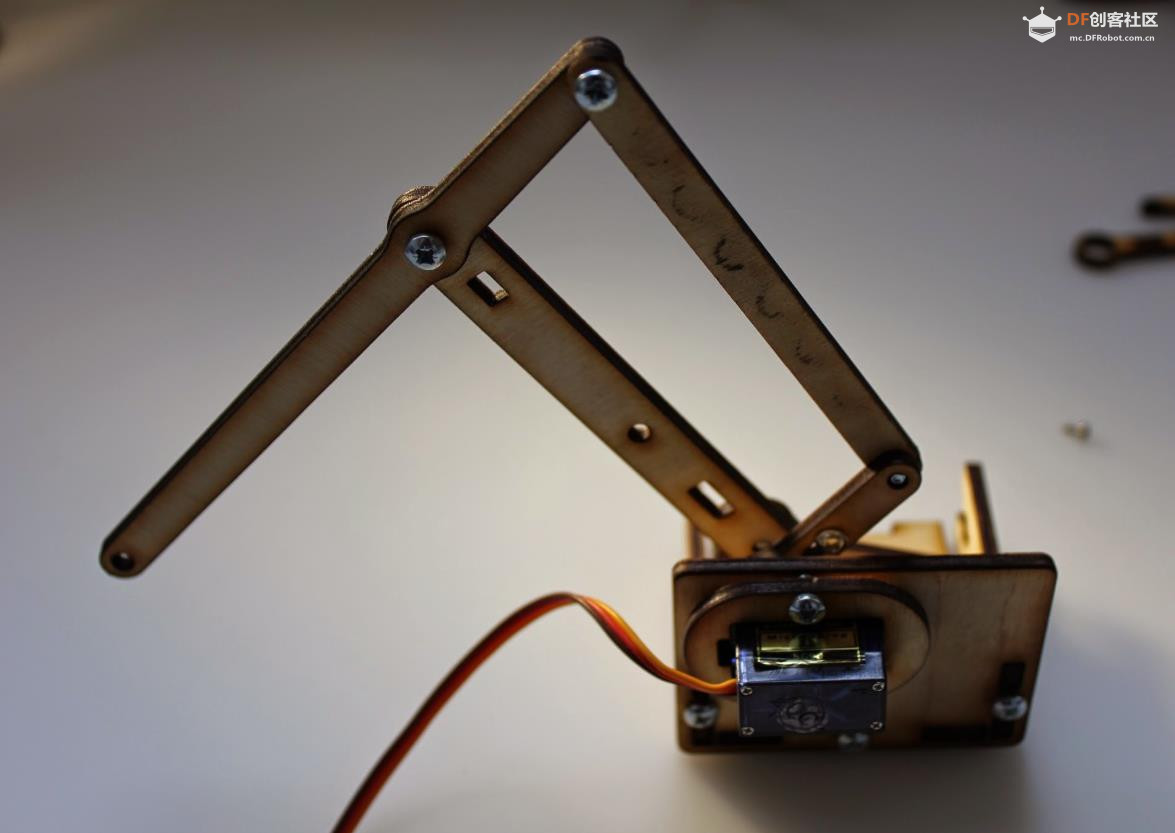
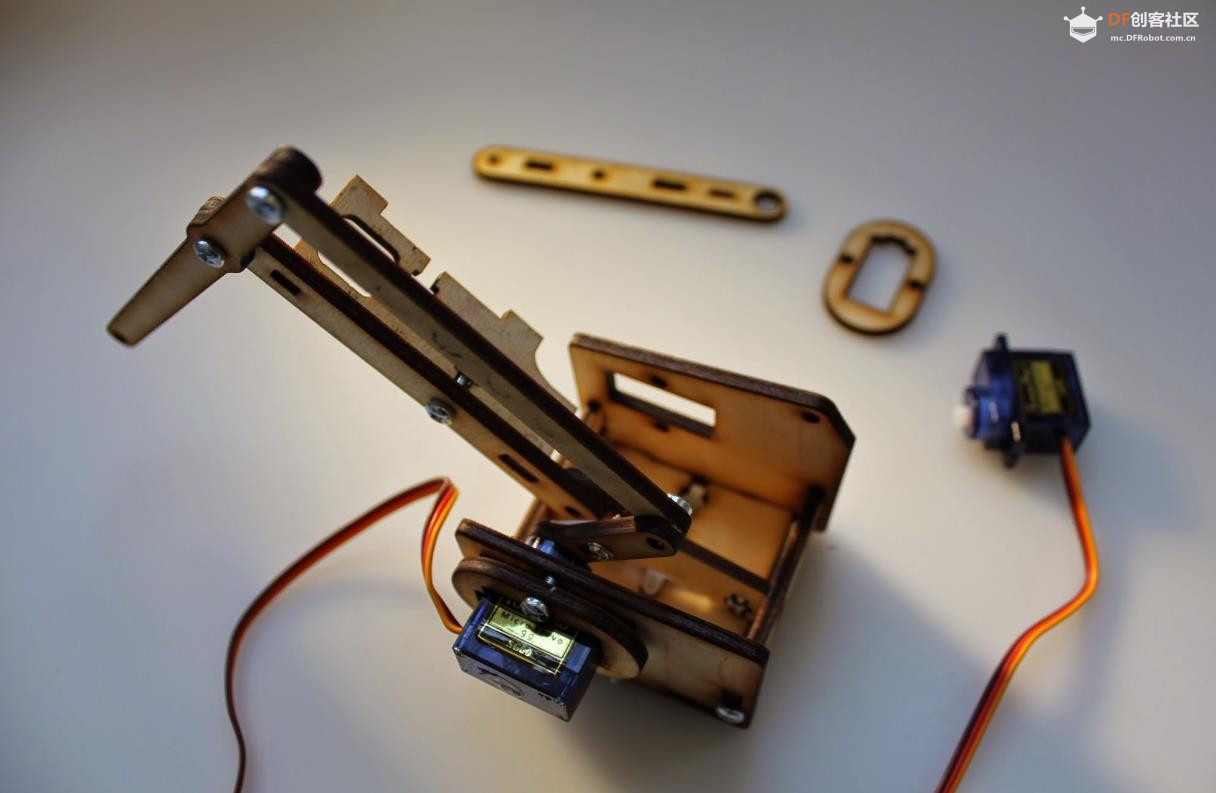
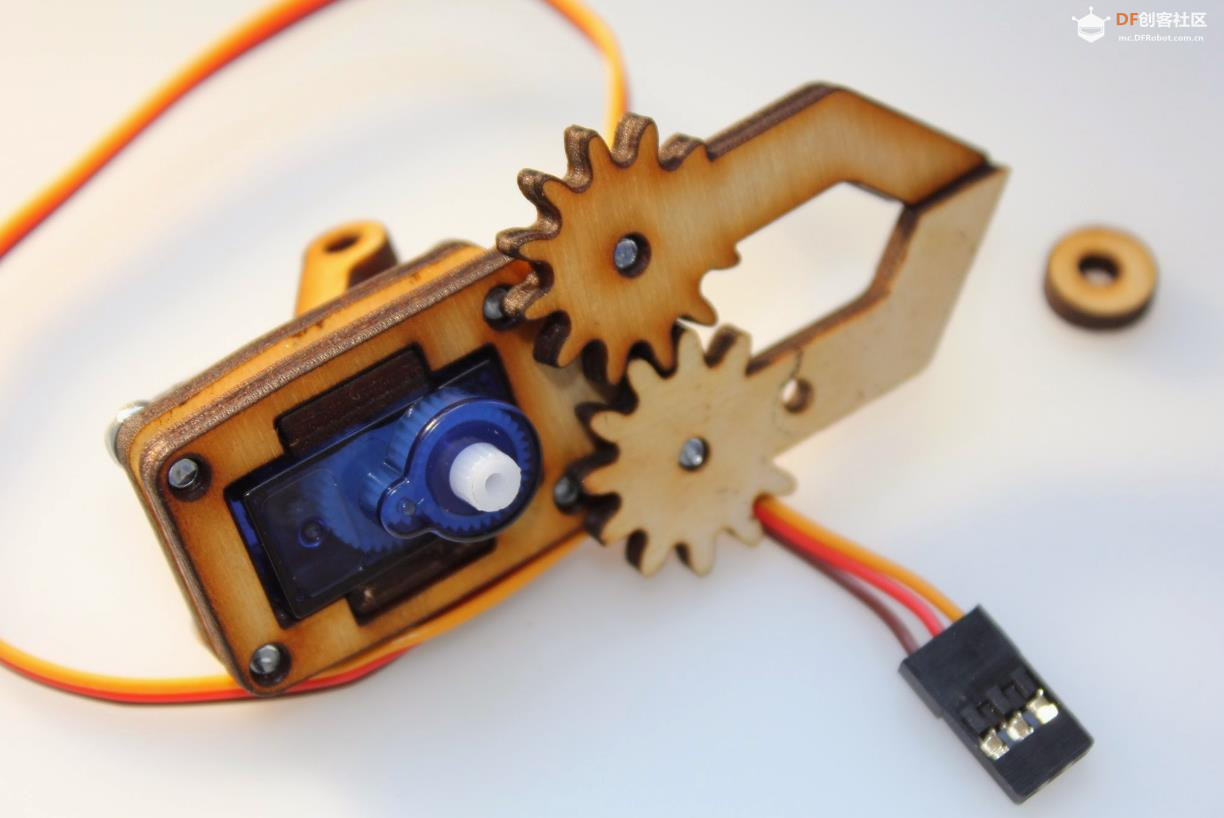
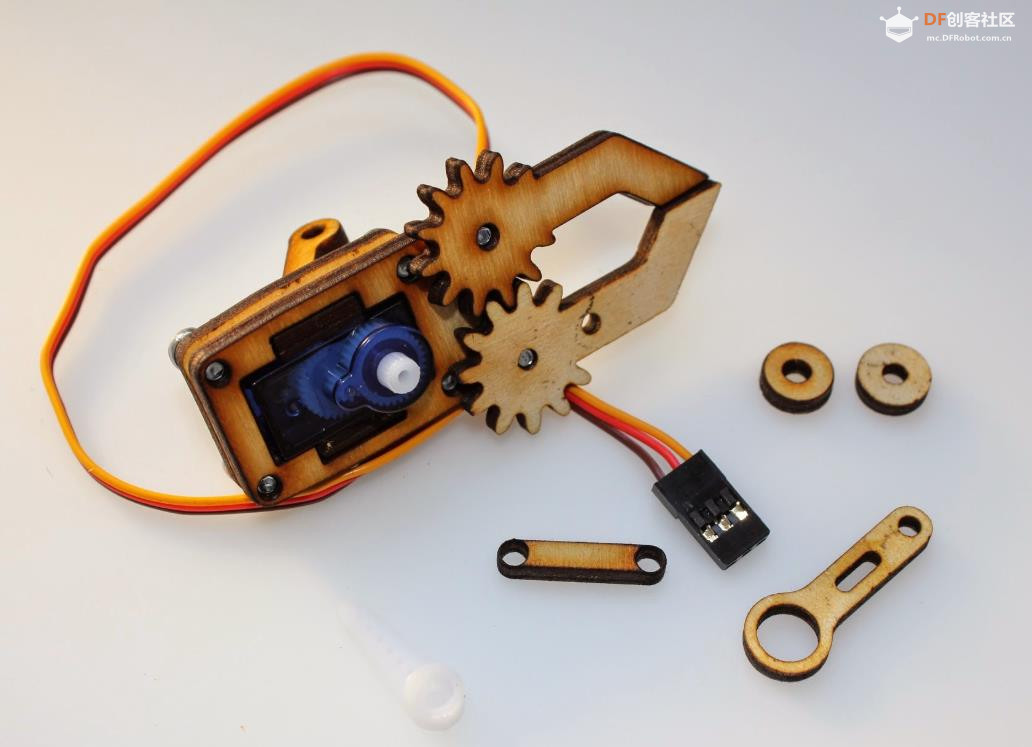
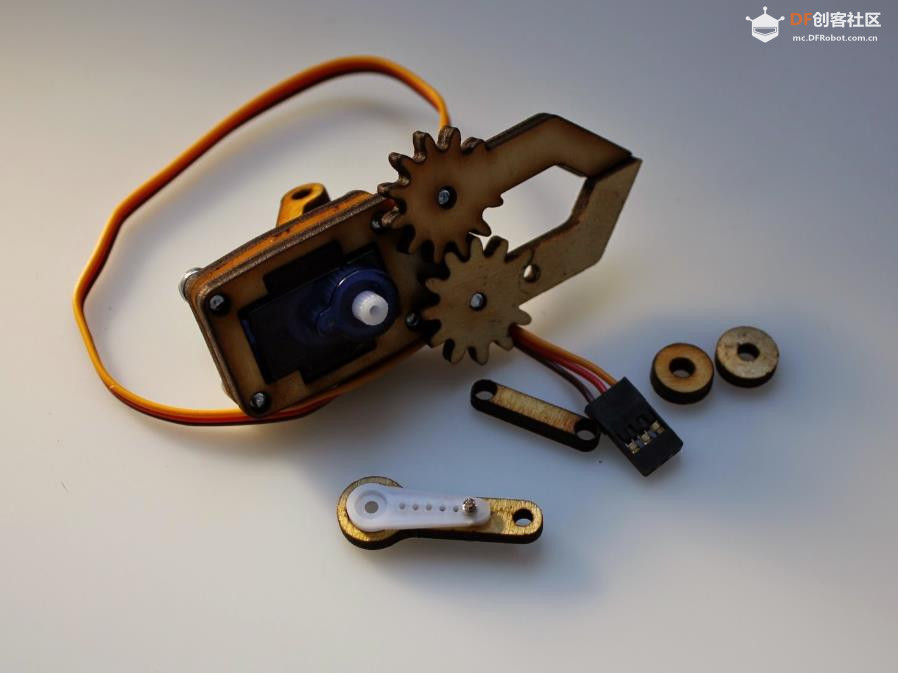
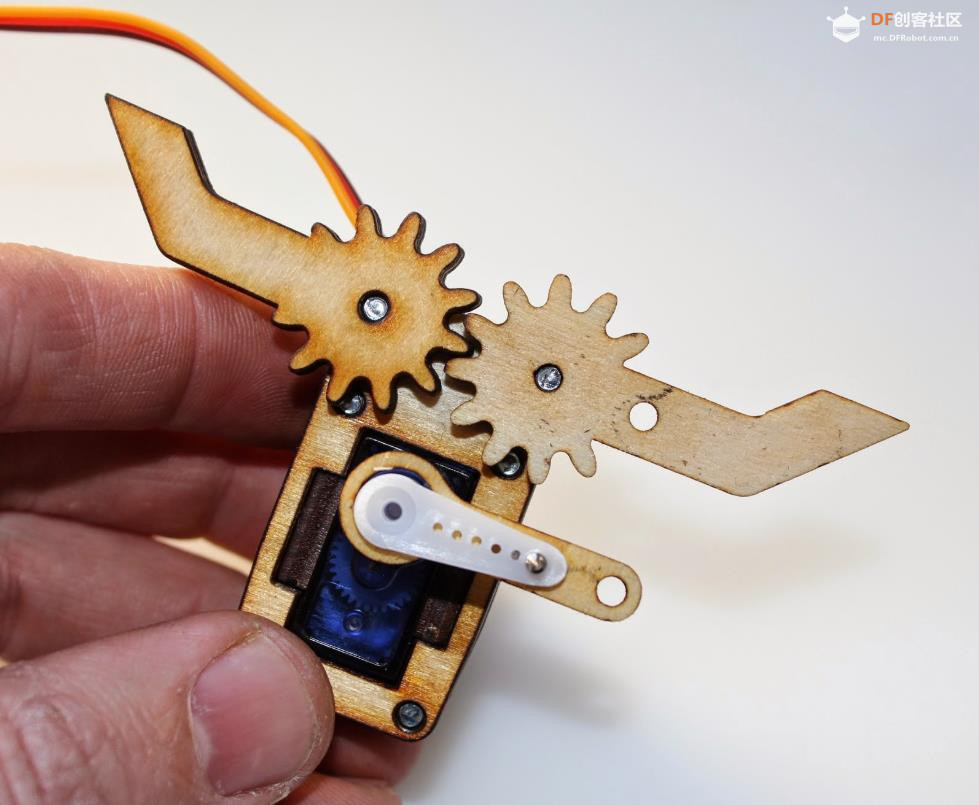
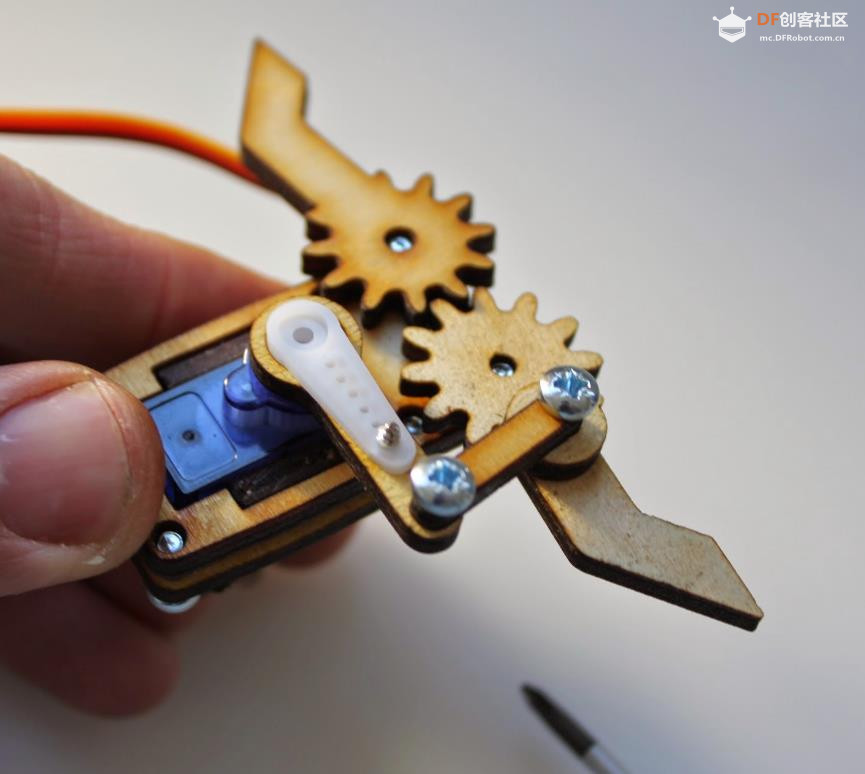
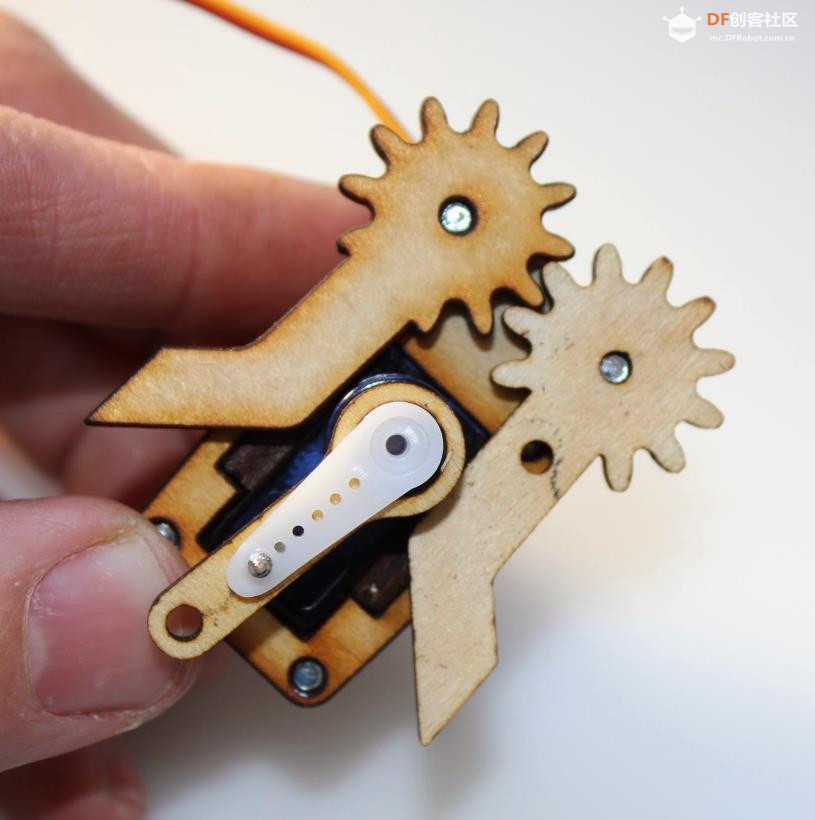
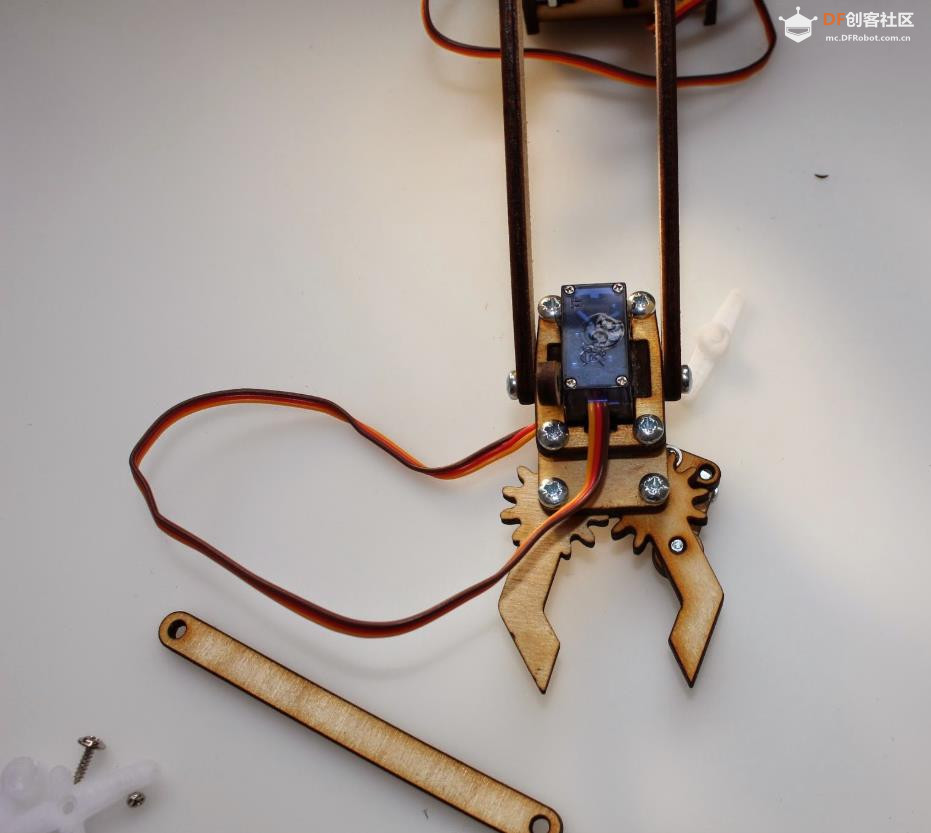
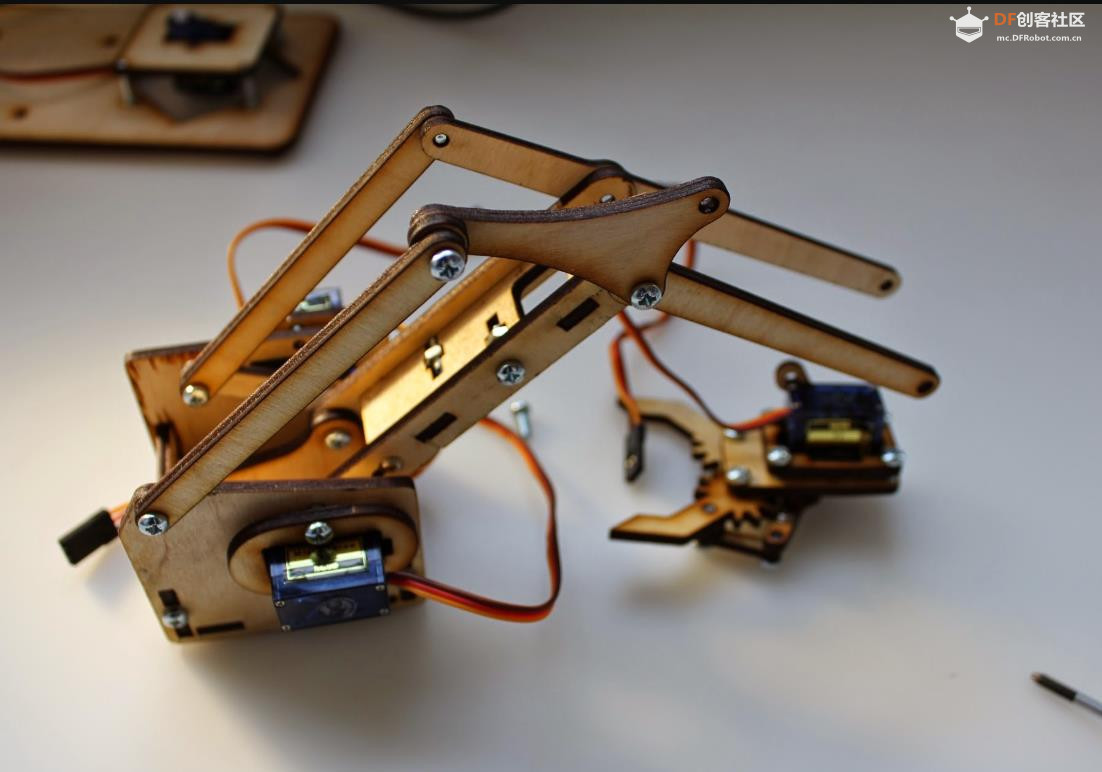
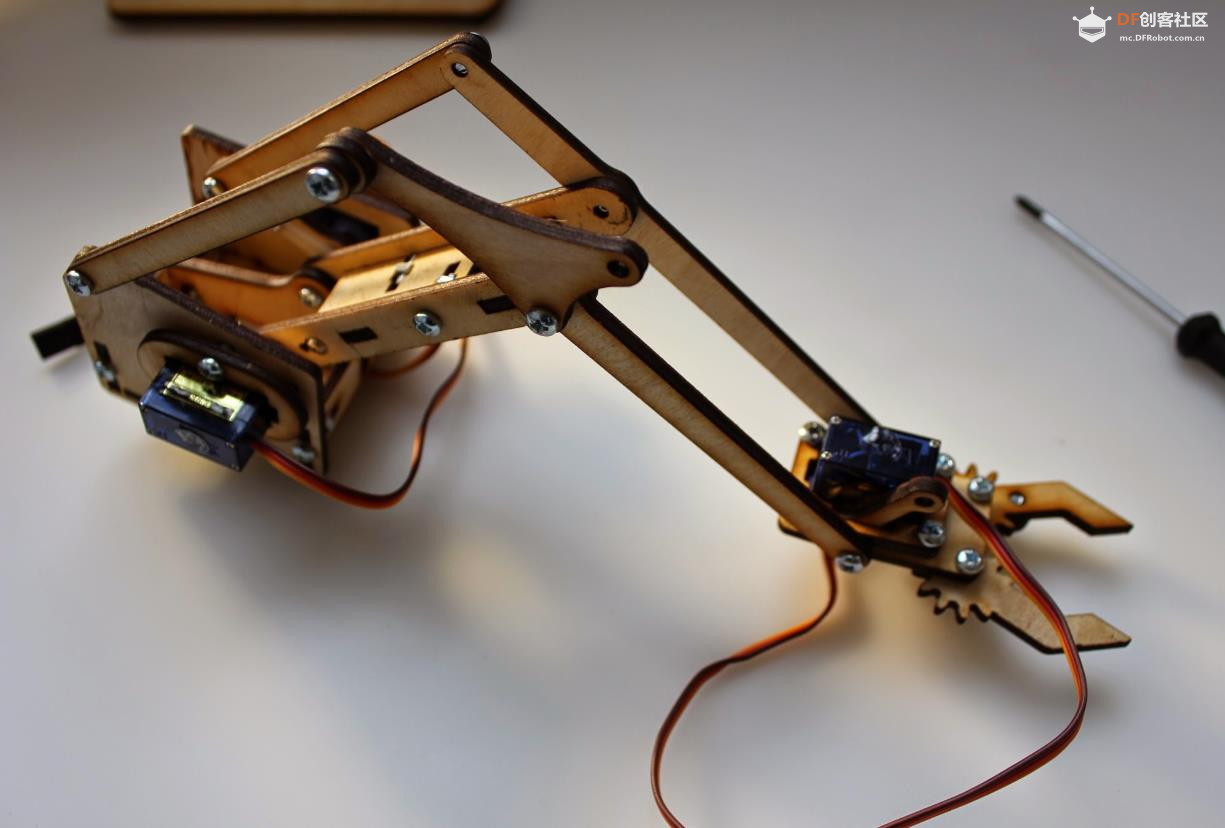
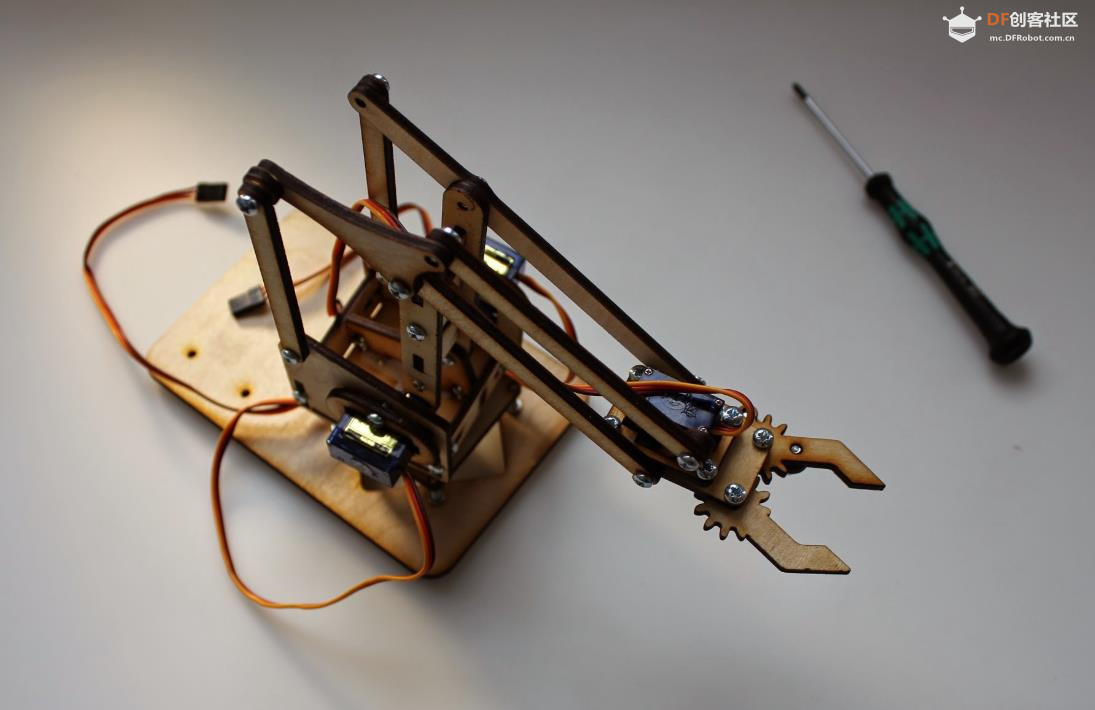
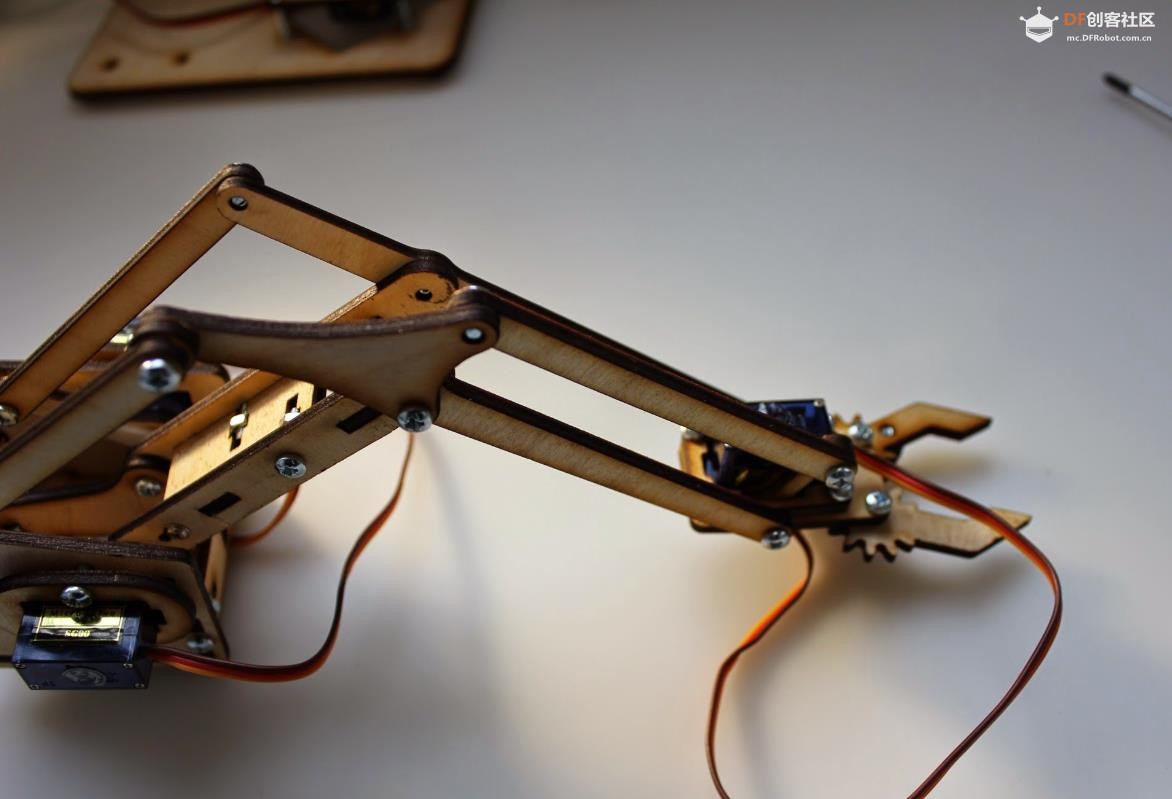
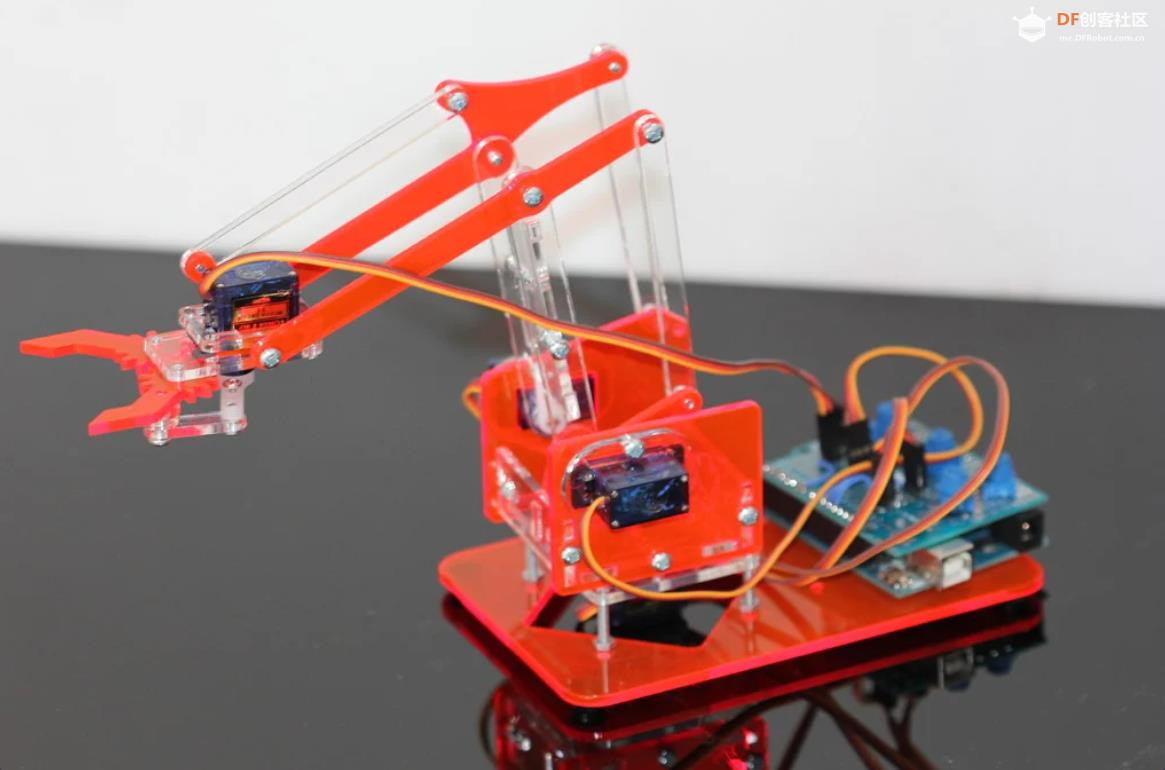
第 8 步:添加剩余的手臂部件! 现在,不用担心此图像中的夹持器,我继续构建了它,但我们接下来会这样做。接下来添加剩余的手臂部件以及保持手腕固定的三角形部件。 为此抓住两个 10 毫米的螺丝。 您需要将三角形部分在外侧,剩余的前臂长度在中间,全部连接到二头肌。前臂与您留下的其他两个长位不同,它们应该是相同的。 用垫片、最后 10 毫米的螺钉和这两个相同的部件之一固定三角形的背面。该部件的另一端将用 6 毫米的螺丝连接到右肩的后部。 现在让我们构建那个抓手。  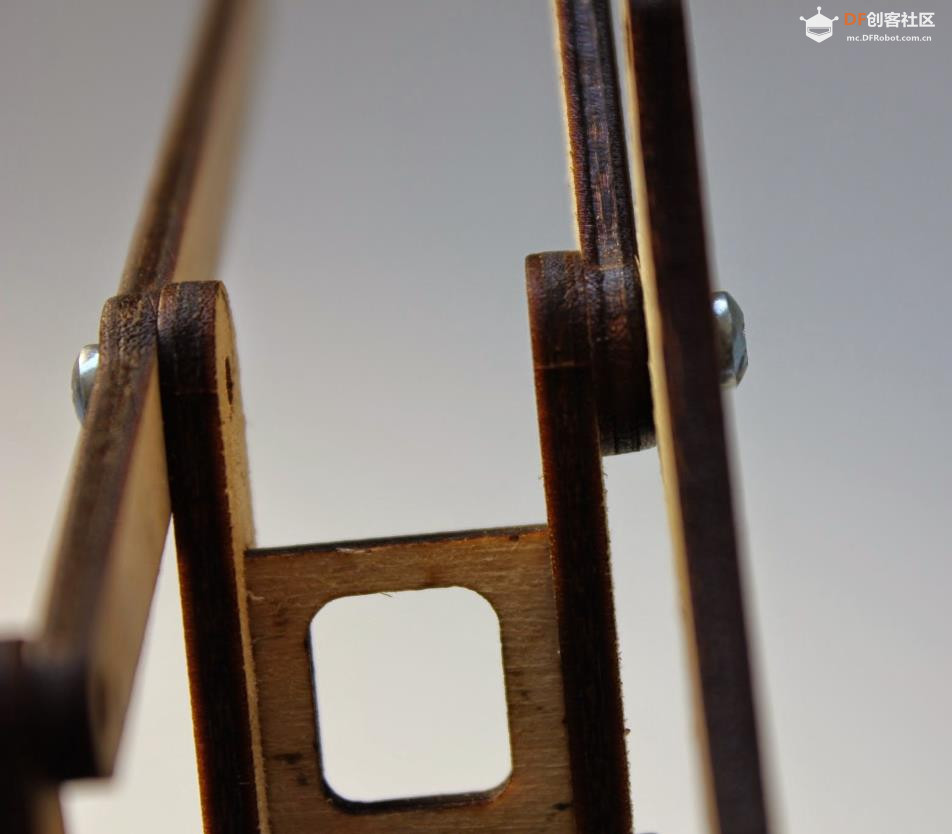  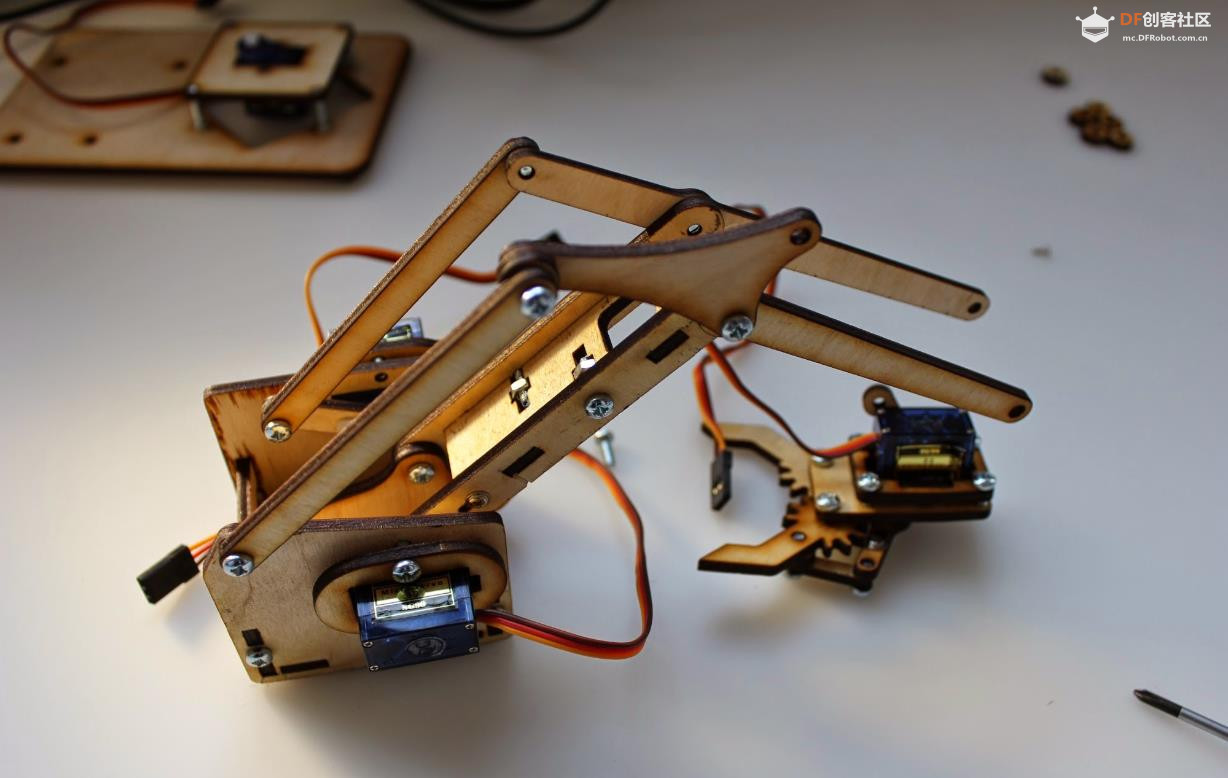 |
|
附录 项目链接:https://www.instructables.com/Me ... Hackable-Robot-Arm/ 项目作者:英国诺丁汉 Phenoptix(凤凰) 项目视频(1分钟):https://www.youtube.com/watch?v=tAhnJ_6QN88 项目代码:https://github.com/phenoptix/MeArm 打印切割文件:https://www.thingiverse.com/thing:298820 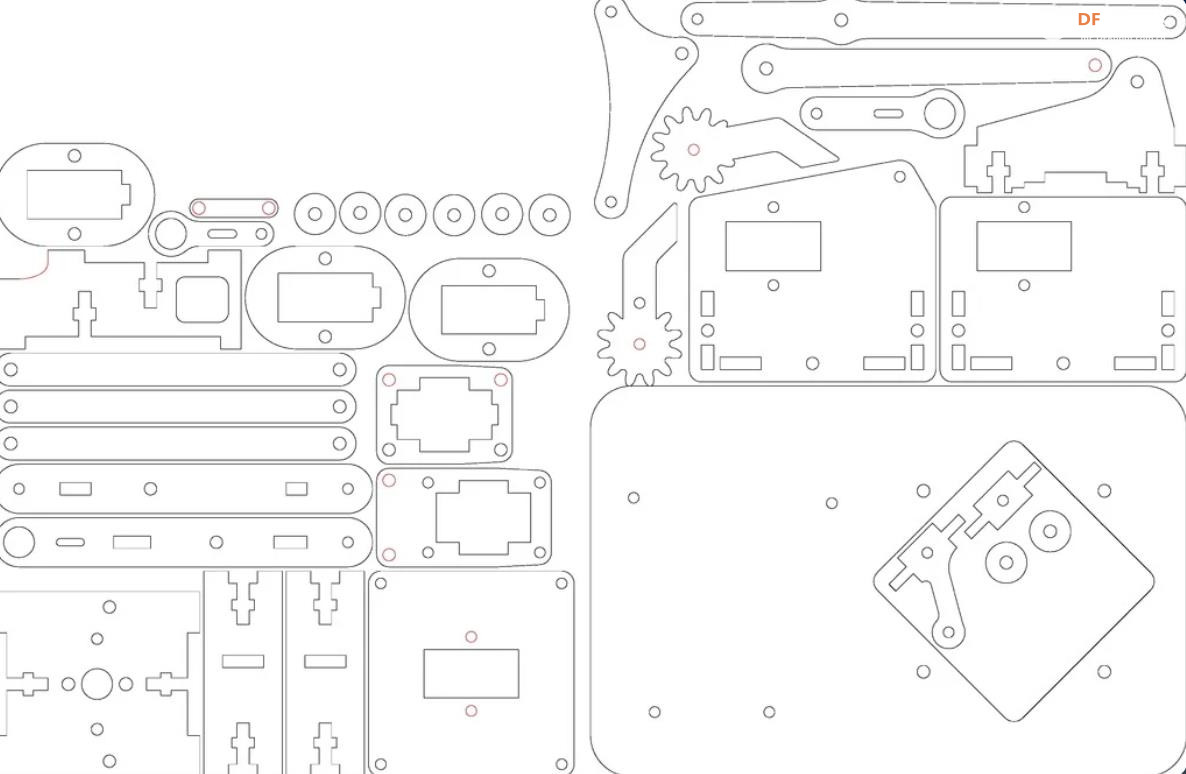 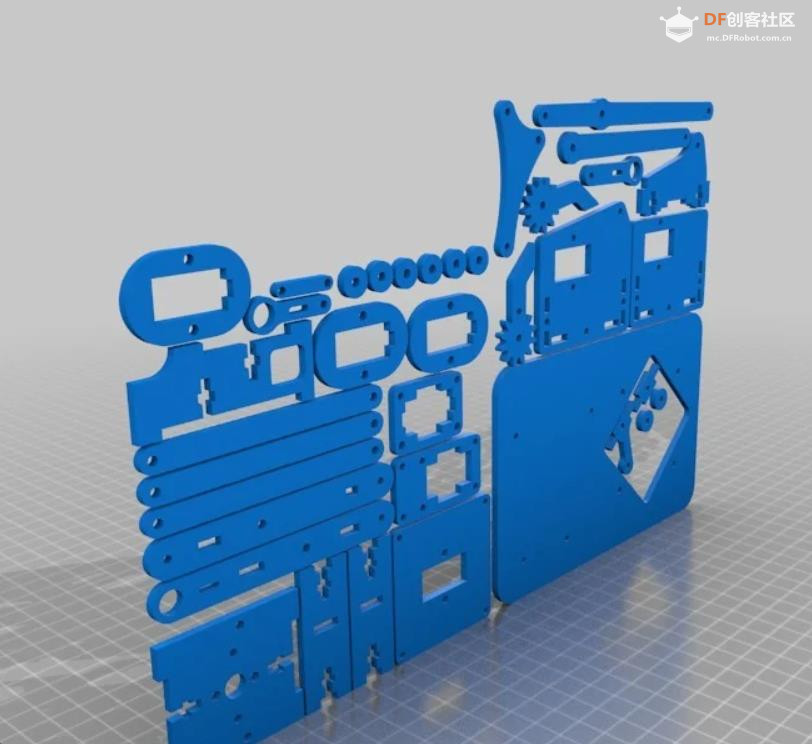 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶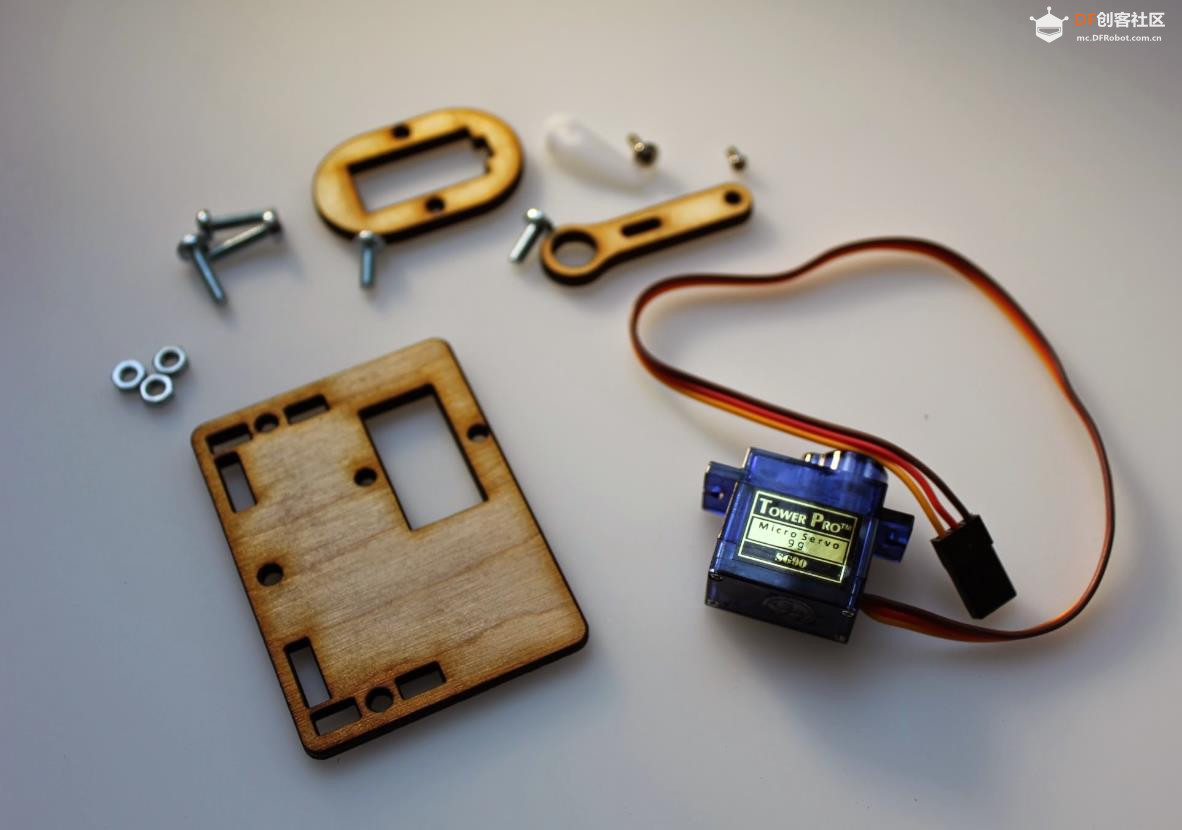






 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






