|
628| 14
|
[K10教程] 【花雕动手做】K10 实验之 UDP 广播双 K10 双向通信点亮LED |
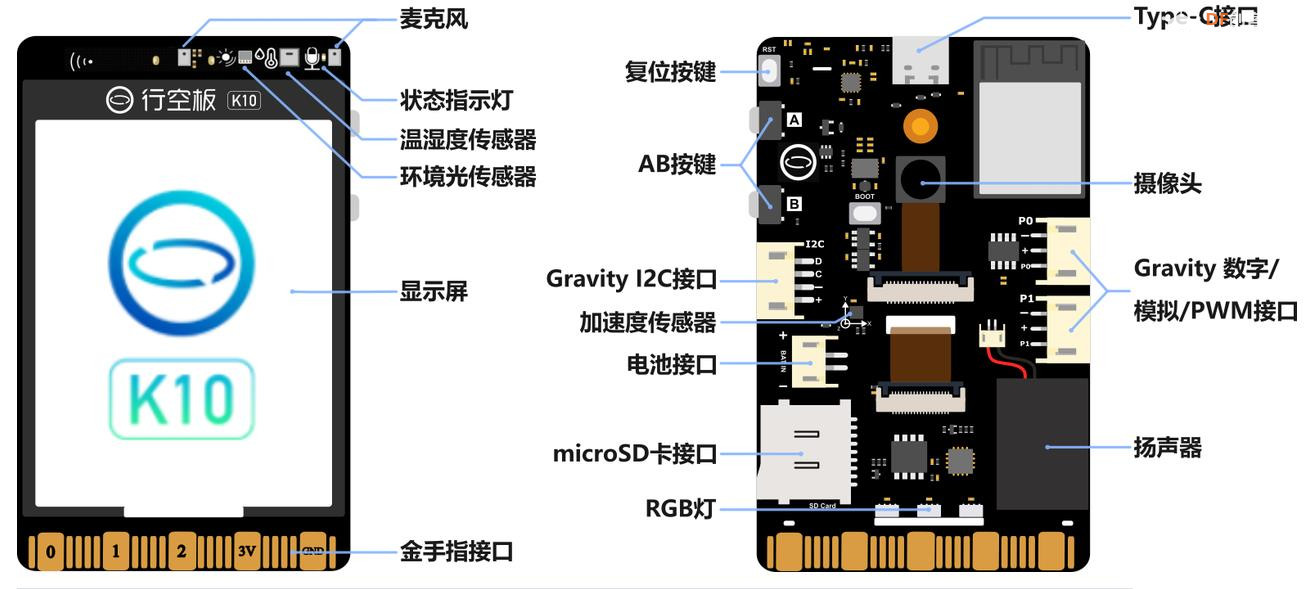
本帖最后由 驴友花雕 于 2026-6-15 17:52 编辑  行空板K10是一款专为快速体验物联网和学习人工智能而设计的开发学习板,100%采用国产芯片,知识产权自主可控,符合信息科技课程中编程学习、物联网及人工智能等教学需求。该板集成2.8寸LCD彩屏、WiFi蓝牙、摄像头、麦克风、扬声器、RGB指示灯、多种传感器及丰富的扩展接口。凭借高度集成的板载资源,教学过程中无需额外连接其他设备,便可轻松实现传感器控制、物联网应用以及人脸识别、语音识别、语音合成等AI人工智能项目。 主要特点 集成摄像头&内置算法,可进行离线图像检测 集成麦克风&内置算法,可进行离线语音识别 集成扬声器&内置算法,可进行离线语音合成 2.8寸彩色屏幕,数据展示更清晰 集成度高,利于教学 接口丰富,兼容软件多,扩展性好 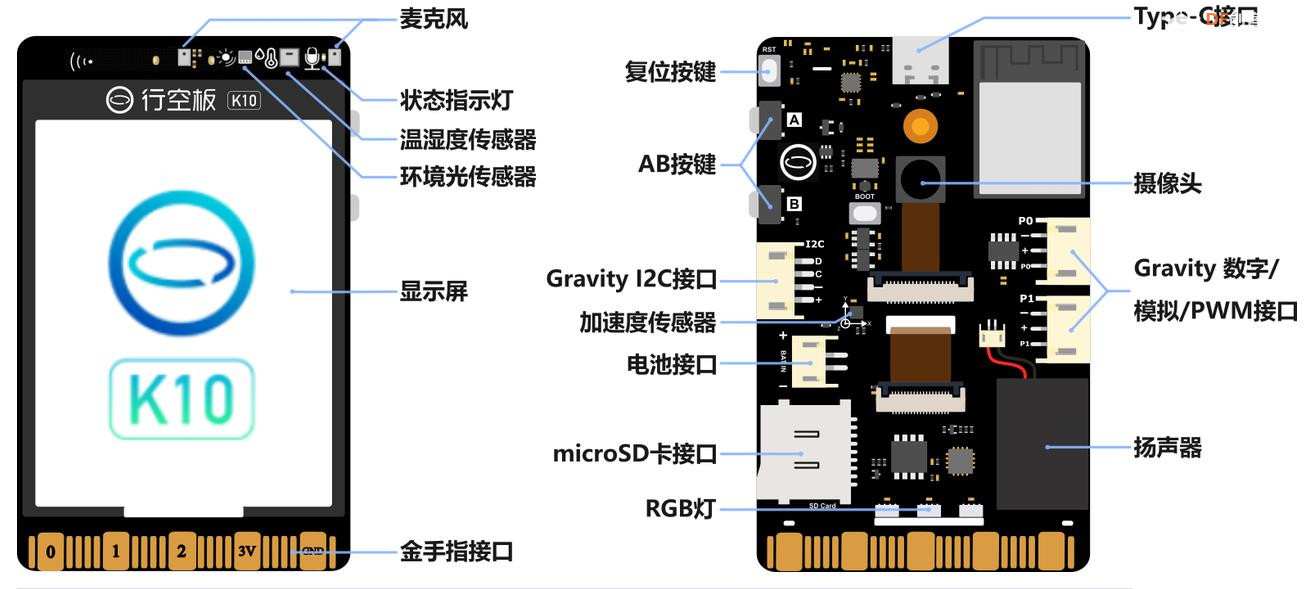 |
|
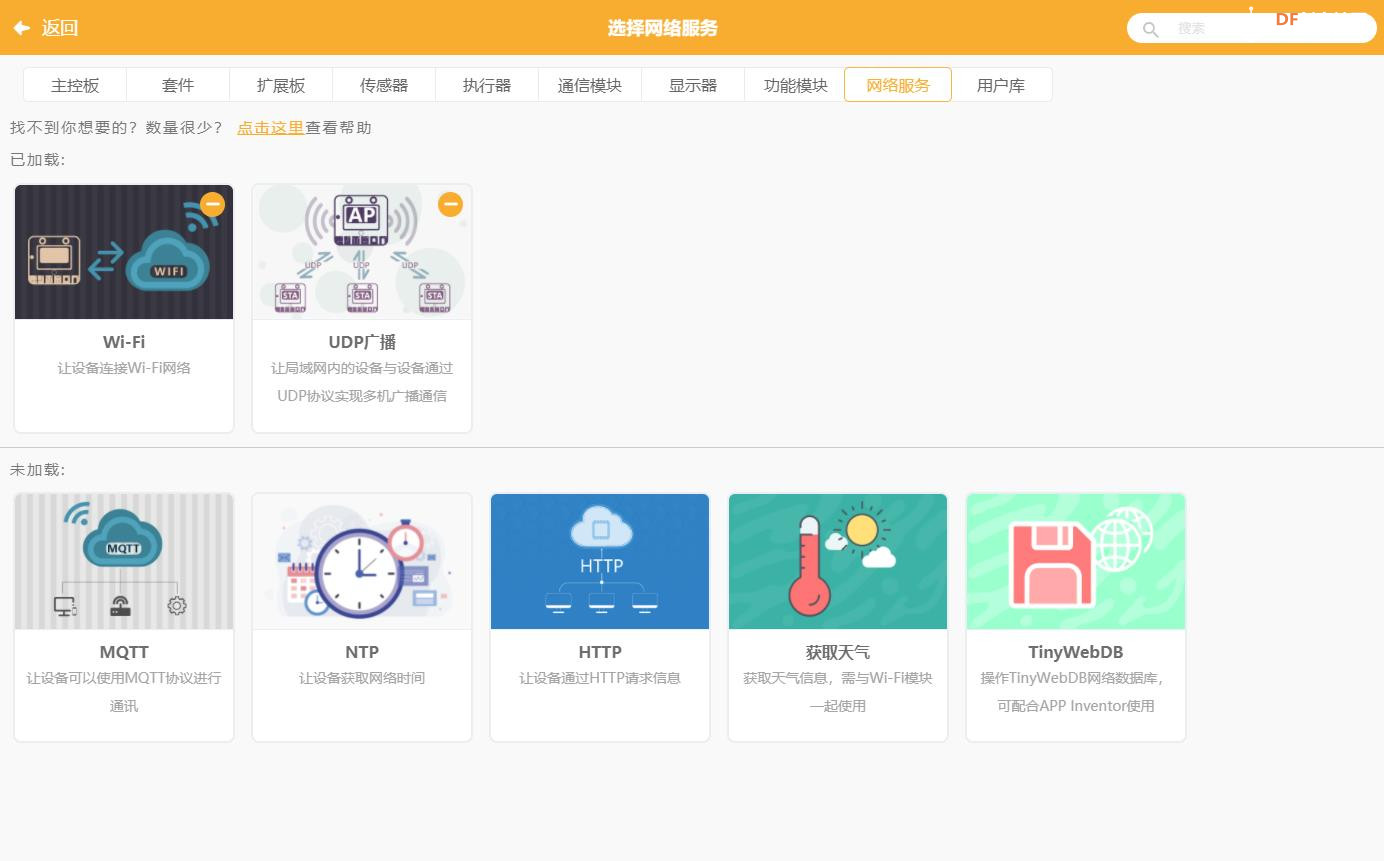
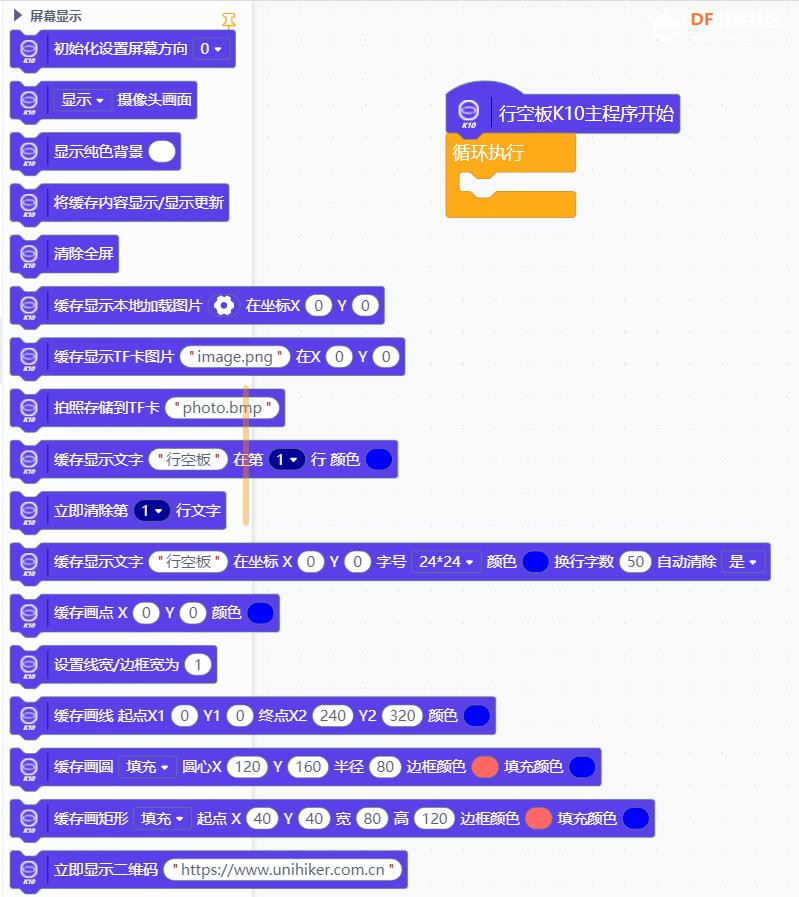
知识点:行空板 K10 WiFi 局域网 UDP 广播 一、UDP 基础概念 UDP 全称用户数据报协议,属于 TCP/IP 网络协议,是无连接、广播式、尽力传输的通信方式。 放到行空板场景:所有设备连同一个 WiFi 路由器,组成局域网,依靠 IP + 端口收发数据;支持一台发送、全网所有设备同时接收,也就是 UDP 广播。 和 TCP 最大区别:不用提前握手建立连接,发消息直接抛到局域网里,速度快、代码简单,但不自动重传丢包数据。 二、运行硬性前提(必须满足) 全部通信行空板 K10 连接同一个 WiFi 热点; 设备自动获取同一段内网 IP(常见 192.168.4.xxx、192.168.1.xxx); 通信双方设置完全一致的端口号(截图示例固定 8888); 程序开头必须先执行 WiFi 配网连接,没连上 WiFi,UDP 模块无法启动。 三、相关图形积木功能解析 1. 基础服务端积木 设置 UDP 服务器端口 8888 本机开启 UDP 监听服务,占用 8888 端口,持续等候局域网内所有广播数据包。一块板子可同时做服务端 + 客户端。 当 UDP 服务器收到 广播消息 事件回调块:一旦局域网内有设备发出广播数据,立刻触发内部执行逻辑(点灯、屏幕打印、动作指令)。 UDP 服务器发送消息 "xxx" 向外发送全网广播包,当前 WiFi 局域网里所有开启 UDP 8888 端口的设备全部收到这条内容。 2. 基础客户端积木 设置 UDP 客户端连接到服务器 IP 192.168.4.1 端口 8888 客户端绑定目标服务端的内网 IP 与端口,建立通信目标;广播场景下 IP 可填局域网广播地址,实现一对多群发。 UDP 客户端发送消息 "xxx" 两种用法:①定向发给上面填写的单个服务器 IP;②发送全网广播,所有同端口设备接收。 当 UDP 客户端收到 广播消息 客户端独立监听广播数据包,收到数据后执行内部程序逻辑。 四、两种常用工作模式 模式 1:一对多广播(教学最常用) 1 块主控发送,N 台从板同步接收动作 主控(发送端):WiFi 联网 → UDP 开启 8888 端口 → 按键 / 陀螺仪触发「服务器发送消息」; 所有从板:WiFi 连同一个热点 → UDP 端口 8888 → 绑定「收到广播消息」回调,识别指令点灯、动作; 特点:一块板子下发指令,几十台设备同步响应。 模式 2:点对点双向通信 A 板客户端连 B 板服务端 IP,双向互发消息,适合一问一答、状态回传(比如小车上报速度、传感器数值回传给主控)。 五、完整积木程序标准结构 发送主控模板 【连接 WiFi】填入 WiFi 名称、密码(第一步必加) 【设置 UDP 服务器端口 8888】 循环 / 按键触发:【UDP 服务器发送消息 "hong"】 接收从板模板 【连接 WiFi】同一个 WiFi 账号密码 【设置 UDP 服务器端口 8888】 【当 UDP 服务器收到广播消息】 判断收到文本,匹配hong/bai/qian等指令,执行 RGB 变色、屏幕文字。 六、UDP 核心优缺点 优点 天然一对多广播:一次发送全网同端口设备接收,批量控制效率高; 速度快延迟低:无握手、无校验重传,体感几乎无卡顿; 兼容多设备:行空板、电脑、手机、ESP32 全都能互通; 数据承载量大:相比离线 Radio 射频,UDP 支持长文本、大量传感器数值、中等长度数据流; 覆盖范围广:路由器 WiFi 全屋覆盖,穿墙能力优于 2.4G 私有射频。 缺点 强依赖 WiFi 网络:无路由器、无 WiFi 环境完全无法运行,户外断电场景不能用; 无可靠传输:干扰、信号弱时会丢包,没有自动补发;稳定场景可重复发送 2 次指令; 功耗更高:WiFi 模块持续通电工作,电池续航比离线 Radio 短; 多组隔离麻烦:多小组实验要分不同 WiFi 热点才能互不干扰,不像 Radio 简单改 Group 数字。 七、实操避坑关键点 WiFi 必须一模一样:发送、接收板子 WiFi 名称、密码完全一致,大小写不能错; 端口号统一:所有设备 UDP 端口必须都是 8888,数字不同收不到; 广播无需精准匹配单个 IP:发全网广播时不用填每台从板 IP,局域网全部 8888 端口设备自动接收; 不要超大段文本发送,过长数据包容易分包乱码; 程序逻辑里不要加超长delay(),会阻塞 UDP 消息监听; 路由器 2.4G WiFi 稳定性优于 5G,行空板优先连 2.4G 频段。 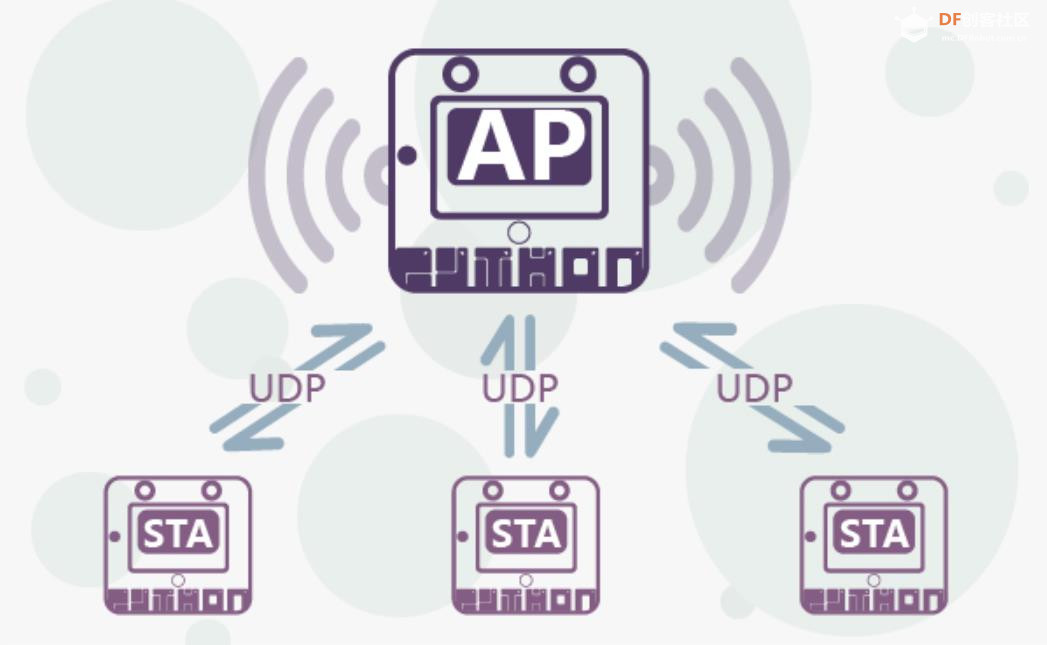 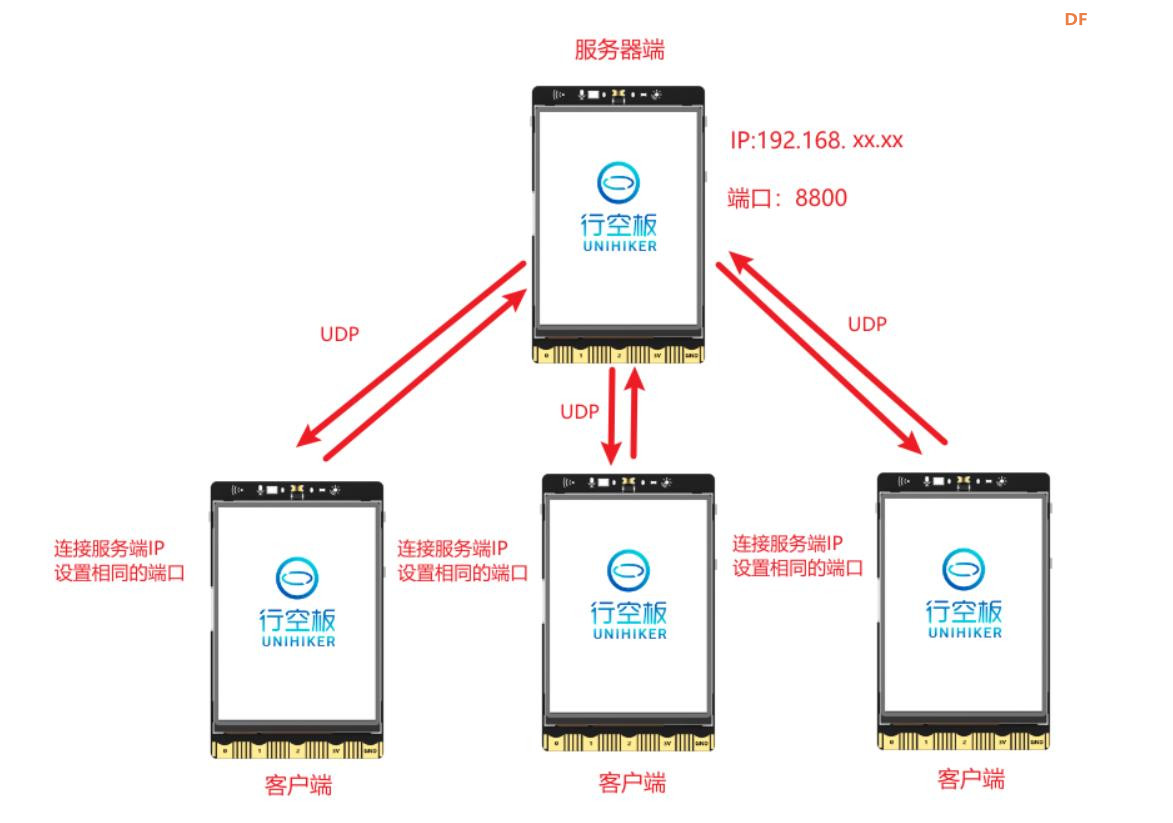 |
|
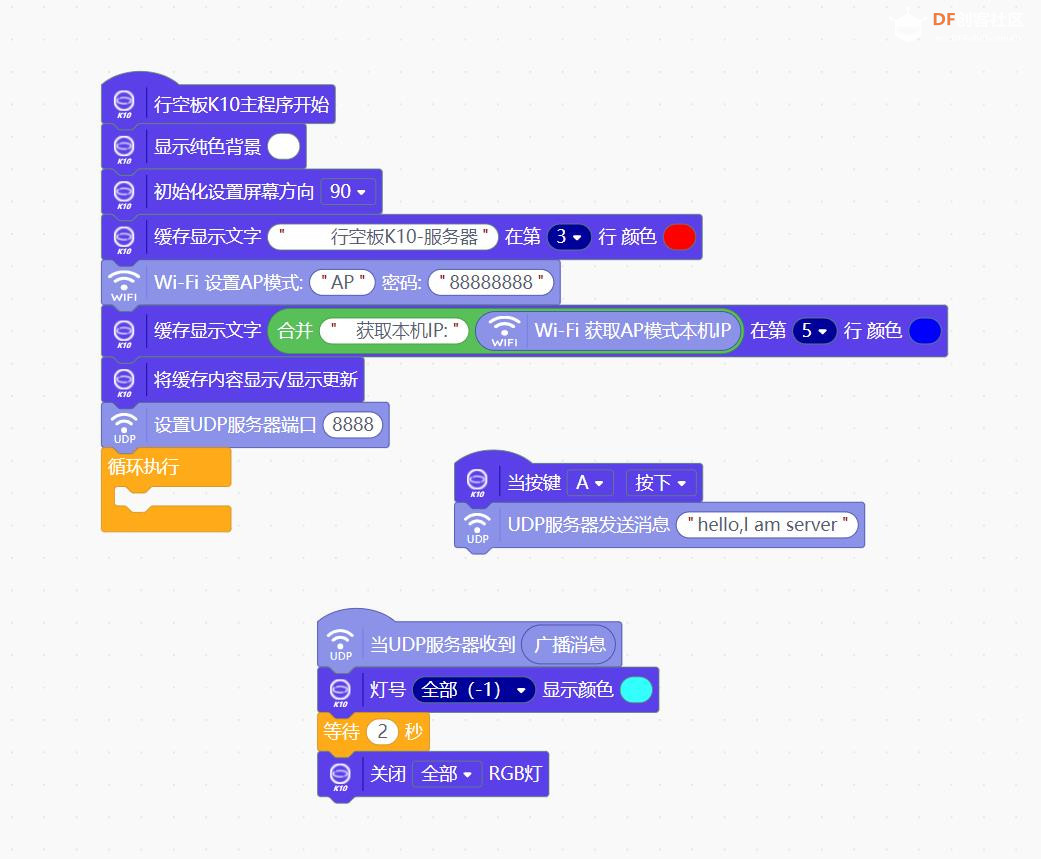
【花雕动手做】行空板K10系列实验之UDP广播双行空板K10双向通信点亮LED 实验开源代码(UDP广播服务器) |
|
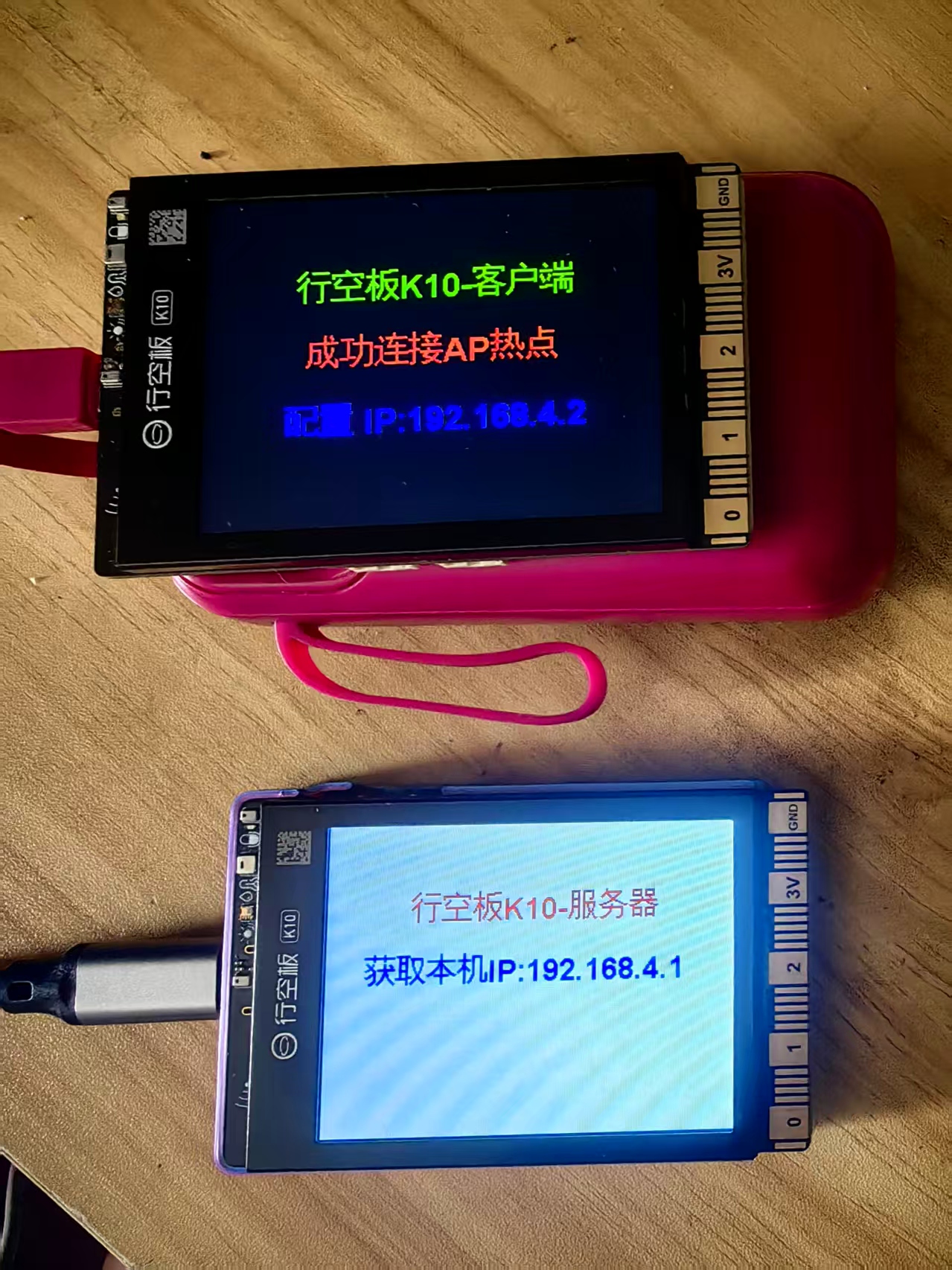
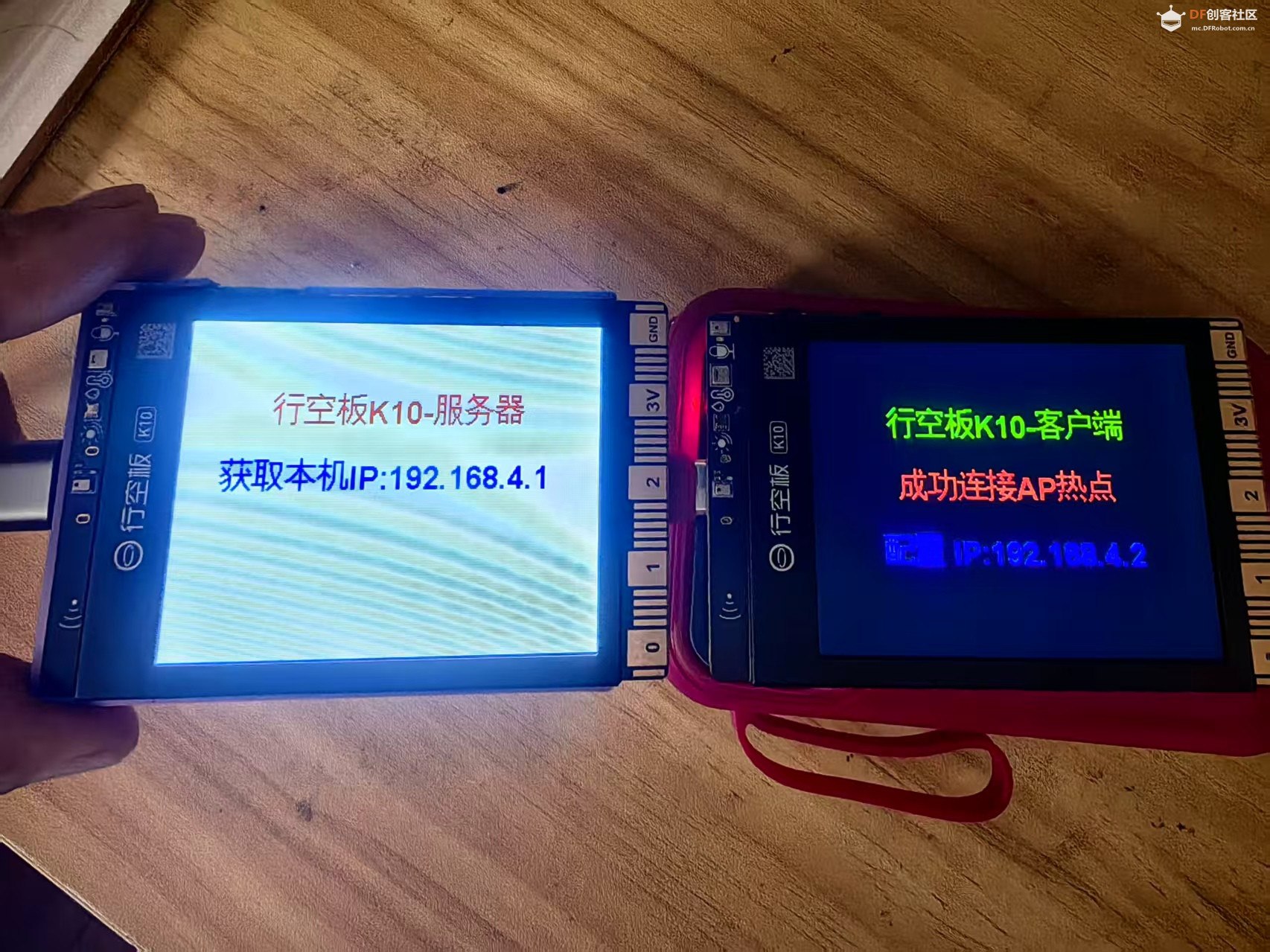
行空板 K10 自建热点 UDP 服务端代码解读 1. 头文件与全局定义 DFRobot_Iot.h:WiFi 管理库,负责开启自建热点 (SoftAP)、读取本机热点 IP; unihiker_k10.h:K10 硬件驱动,管控屏幕、画布、A 按键、RGB 彩灯; DFRobot_UDPServer.h:标准 WiFi UDP 服务端库,开启端口监听、接收客户端消息、广播发送数据。 2. setup () 开机一次性初始化 初始化全部硬件:屏幕总线、按键 IO、RGB 灯、系统底层资源。 绑定 UDP 接收回调:后台扫描到客户端 UDP 数据包,自动执行接收函数,不用循环轮询。 设置屏幕显示方向;创建画布缓存,文字统一刷新减少屏幕闪烁。 绑定 A 按键中断:按下 A 键,立刻执行发送 UDP 消息的函数。 屏幕底色纯白;第 3 行红色大字标注本机是 UDP 服务端。 核心:本机开启WiFi 热点 热点名称:AP 连接密码:88888888 本机变身小型路由器,其他板子连这个热点就能组成局域网。本机热点固定网关 IP:192.168.4.1 读取本机热点 IP,在第 5 行蓝色字体打印;刷新画布把全部文字显示到屏幕。 UDP 服务端开启8888 端口持续监听,等待客户端连接收发消息。 3. loop () 主循环 循环空白,全程事件驱动: WiFi 热点、UDP 收包、按键检测全部由库后台线程独立运行,不需要在 loop 里反复扫描信号。 4. 两个回调功能函数 (1)A 按键按下:主动广播消息 按下 A 键,向所有连接本热点、监听 8888 端口的设备,广播发送文本 hello,I am server。 (2)收到客户端 UDP 消息触发动作 message变量储存客户端发来的完整文字内容;本段代码只做灯光反馈,没有打印收到的文本。 5. 整套配对通信规则 本机(服务端) 角色:UDP 服务端 + WiFi 热点发射器 IP:192.168.4.1 端口:8888 行为:按 A 发广播;收到消息亮浅青灯 2 秒 配套客户端要求 WiFi 必须连接热点 AP、密码88888888; UDP 客户端连接地址 192.168.4.1、端口8888; 客户端按 A 发送消息,服务端灯光响应;服务端按 A 发消息,客户端可屏幕打印文字。 6. 协议区分重点 本代码 = 标准 WiFi 局域网 UDP 完全符合教科书 UDP(User Datagram Protocol)传输层协议,依托 TCP/IP、IP + 端口寻址,和你截图里 IP 端口的 UDP 图形积木是同一套网络方案,必须依赖 WiFi。 和DFRobot_ESP32_Radio(BLE蓝牙广播)本质区别 | 项目 | WiFi UDP(当前代码)|BLE 分组广播(Radio 库)| |--------|-----------------------|-----------------------------| | 网络依赖 | 必须 WiFi 组网 | 无 WiFi,上电离线通信 | | 寻址标识 | IP 地址 + 端口号 | Group 分组数字 | | 功耗 | WiFi 功耗偏高,电池续航短 | BLE 低功耗,续航更长 | | 传输数据 | 支持较长文本、批量数据 | 仅限 10 字符内短指令 | 7. 实操注意点 delay(2000)会阻塞消息接收:亮灯 2 秒内新来的 UDP 消息会延后响应;优化可用非阻塞毫秒计时; UDP 无丢包重传,信号差容易丢包,稳定场景可连续两次 send 发送; 只支持 2.4G WiFi,5G 频段无法连接; 热点名、密码、端口号两端必须完全一致,大小写不能出错。 |
|
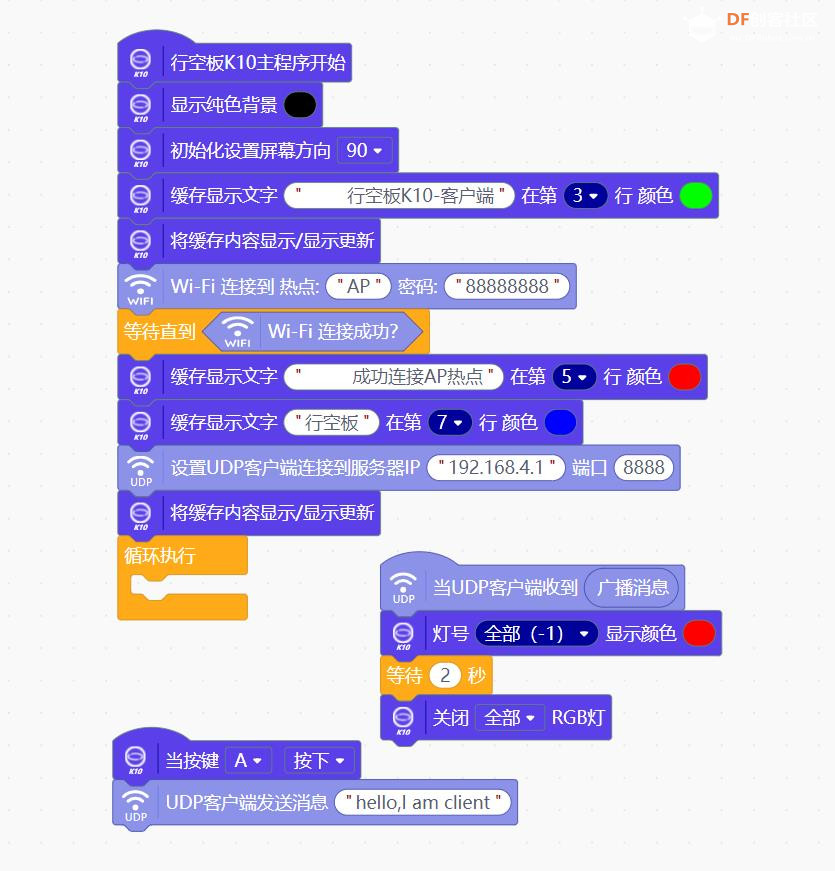
【花雕动手做】行空板K10系列实验之UDP广播双行空板K10双向通信点亮LED 实验开源代码(UDP广播客户端) |
|
本帖最后由 驴友花雕 于 2026-6-15 10:45 编辑 行空板 K10 UDP 客户端代码解读 一、头部引入与全局定义 二、setup () 开机一次性初始化 初始化屏幕、按键、RGB、系统总线等所有底层硬件,硬件程序必备首行。 绑定 UDP 接收回调:后台线程监听服务端数据包,收到消息自动运行onUdpClientRecvMsg,不用在 loop 循环轮询。 设置屏幕显示翻转角度;创建画布缓存,文字批量刷新,减少屏幕闪烁。 A 按键绑定中断回调:物理按下 A 键,立刻执行发送 UDP 消息的函数。 屏幕底色设纯黑;第 3 行绿色大字标记本机是 UDP 客户端;第一次刷新文字到屏幕。 连接服务端搭建的 WiFi 热点:热点名AP、密码88888888; while阻塞死循环:必须等到 WiFi 连接成功,代码才会向下执行,防止无网络启动 UDP 失败。 联网成功后,第 5 行红字提示连接成功;第 7 行拼接打印本机被热点分配的内网 IP 地址。 UDP 客户端发起连接: 目标服务端 IP:192.168.4.1(服务端 SoftAP 固定网关 IP) 统一通信端口:8888 刷新画布,把联网提示、本机 IP 完整显示在屏幕上。 三、loop () 主循环 循环完全空置,整套程序事件驱动运行: WiFi 连接、UDP 收包、按键检测全部由库后台反文旁虫立线程处理,无需手动循环扫描信号。 四、两个核心回调函数 1、收到服务端 UDP 消息回调 message变量存放服务端发来的完整字符串;本段只做灯光反馈,没有打印文本内容。 2、A 按键按下发送消息回调 每按一次 A 键,向服务端 IP:8888 发送 UDP 文本:hello,I am client。 五、与配套服务端完整配对关系  双向交互流程 先启动服务端,热点开启、UDP 端口打开; 客户端上电自动连热点,联网后自动对接服务端 UDP; 客户端按 A → 发送 client 消息 → 服务端灯光亮起; 服务端按 A → 广播 server 消息 → 客户端灯光亮起。 六、通信方案定性区分 本套 UDPClient/UDPServer = 标准 WiFi 局域网 UDP 完全符合 User Datagram Protocol 传输层协议,依托 TCP/IP 网络,用 IP + 端口寻址,和你截图里 IP、端口的图形 UDP 积木是同一套,必须依靠 2.4G WiFi 才能运行。 和DFRobot_ESP32_Radio(BLE 蓝牙广播)核心差异 | 对比项 | WiFi UDP(当前代码)|BLE 分组广播(Radio 库)| |-----------|---------------------|-----------------------------| |WiFi 依赖 | 必须连接热点组网 | 无 WiFi,上电离线通信 | | 寻址方式 | 内网 IP + 端口号 | Group 分组数字 (0~255) | | 功耗 | WiFi 模块持续工作,续航短 | BLE 低功耗,电池续航久 | | 传输能力 | 支持较长文本、批量数据 | 仅限 10 字符内短开关指令 | 实操避坑要点 delay(2000)会阻塞消息接收:亮灯 2 秒内新来的 UDP 消息会延迟响应;优化用millis()做非阻塞计时; UDP 是不可靠传输,无自动丢包重传,干扰环境可以连续两次sendUdpMsg提升成功率; 仅支持 2.4G WiFi,5G 频段无法连接; 热点名称、密码、端口号两端必须一字不差,大小写、符号不能出错; 服务端未开机开热点时,客户端会卡在while (!myIot.wifiStatus()){}死循环里卡死。 |
sVvGOQ5InMMG 发表于 2026-7-14 23:12 ESP32 系列芯片 BOOT 按键统一绑定 GPIO0 行空板 K10:独立实体 BOOT 按键,背面单独按键,GPIO0 硬件功能(底层烧录必备) 1. 进入固件下载 / 烧录模式(最常用) 原理:上电瞬间 GPIO0 拉低,芯片跳过用户程序,进入 Bootloader 下载模式 行空板 K10 操作步骤 1. 拔掉 USB 断电 2. 按住**BOOT 键不放** 3. 插上 USB 连接电脑 4. 电脑识别串口后松开 BOOT 用途: - 烧录完整 ESP32 固件、读卡器固件、AI 小智固件 - Mind + 恢复设备初始设置、擦除 Flash、修复变砖无法上传程序行空板 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶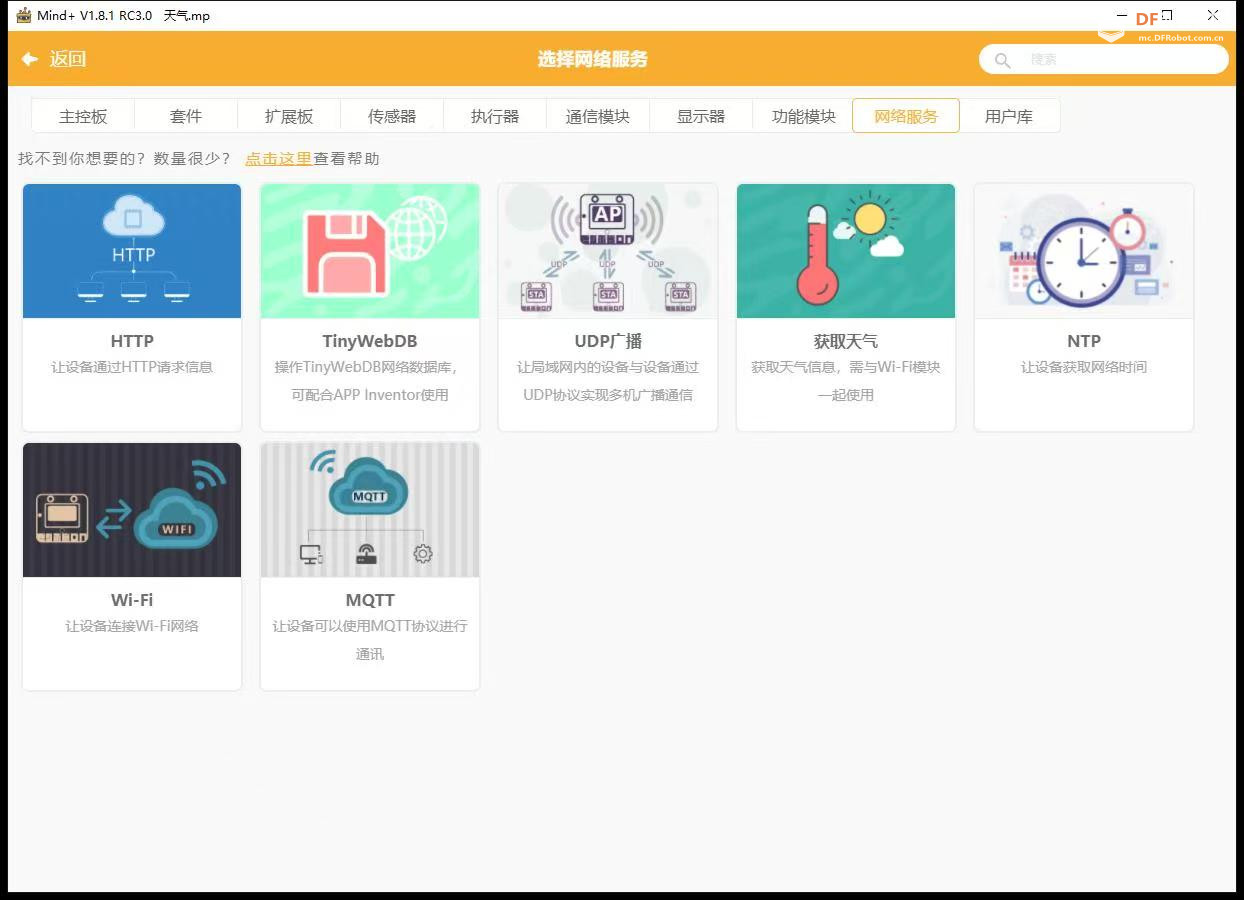






 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






