|
88| 0
|
[项目] 【Arduino 动手做】使用Xbox控制器控制麦克纳姆机器人 |
|
我们现在已经在 Hackster.IO 上为 Pulse Train Hat 创建了一个平台,如果您能成为会员来帮助我们,那么这将对我们有很大帮助,因为我们需要 25 名会员才能让它成为特色。 https://www.hackster.io/pulse-train-hat 使用即时命令的 PTHAT Mecanum Bot 示例 第 1 部分 通过此示例,我们将展示如何使用 PTHAT 和无线 Xbox 控制器控制麦克纳姆机器人。我们将其命名为麦克纳姆机器人,是因为它使用了麦克纳姆轮,可以实现一些疯狂的动作。它与所有通过 WiFi 发送的通信兼容,并且可以与 Xbox 控制器配合使用,实现自由式操控。 PC 充当中间人,无线 Xbox 控制器通过它与使用 C# 为 Windows 10 IOT 编写的通用 Windows 应用程序 (UWA) 进行通信。 然后,它会创建一个网络套接字连接,连接到在 Raspberry Pi 上运行的另一个 UWA,该 UWA 监听网络并接收命令,然后将这些命令传递给控制电机的脉冲列车帽。 第 2 部分 首先,我们将 UWA 部署到 Raspberry Pi,然后使用物联网遥控器进行设置。在应用程序中,首先从下拉列表中选择 Raspberry Pi 的串行端口,然后点击“连接”按钮,连接到 Raspberry Pi。现在,您可以在应用程序中测试 Jog 按钮,确保机器人能够移动,然后使用在 PC 上运行的 UWA,通过 Xbox 控制器进行测试。 在 Raspberry Pi 上运行的 UWA 还会创建一个网络套接字,并在端口 9000 上监听来自 Xbox 控制器所连接 PC 的传入数据包。 正如您所见,它的组件并不多,而且相当大,面积超过 500 平方毫米,并使用 152 毫米的轮子。您可以使用更小、更便宜的轮子,也可以使用更小的低成本电机。 第 3 部分 本例中使用的即时命令是: 设置轴命令 启动轴命令 停止轴命令 切换电机启用线 请求固件版本 重置 PTHAT 最终开发人员可以轻松修改此示例来构建自己的应用程序。 示例应用程序是在 Visual Studio 2015 中开发的,可以与 Raspberry Pi 上的 Windows 10 IOT 一起使用,也可以编译为 x86/x64 以在 PC 上使用。该示例已用 C# 编写为通用 Windows 平台 (UWP)。 请使用以下链接下载完整的源代码。 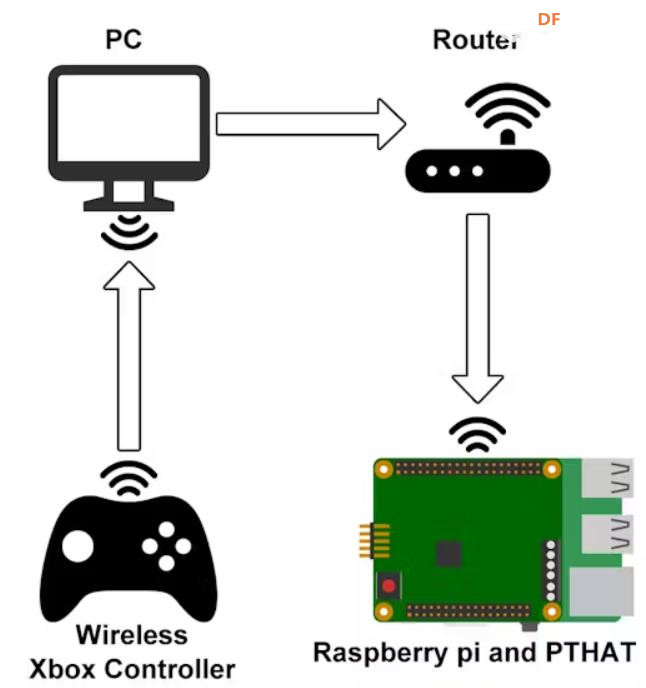 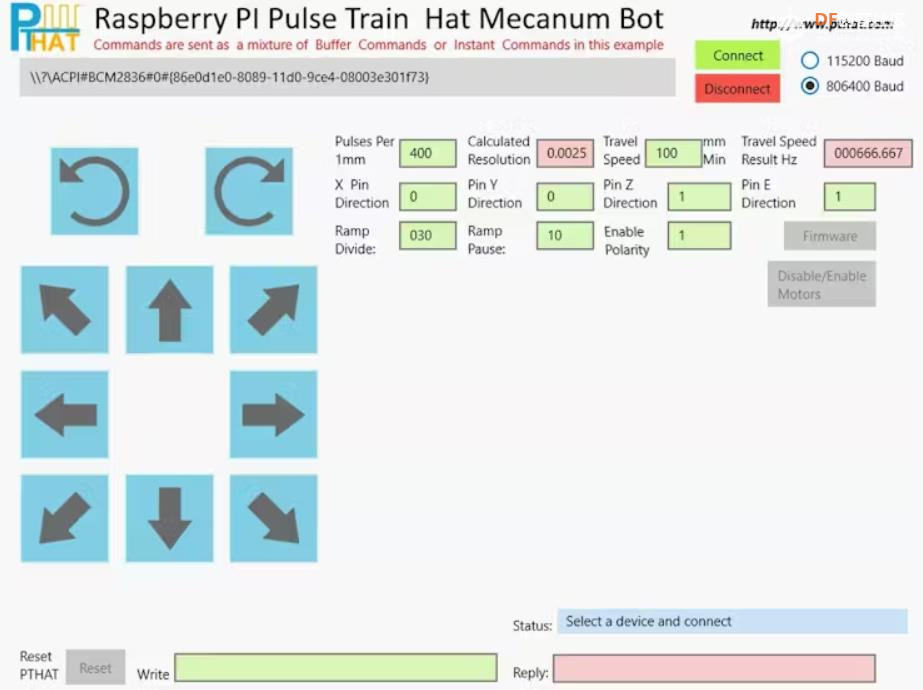 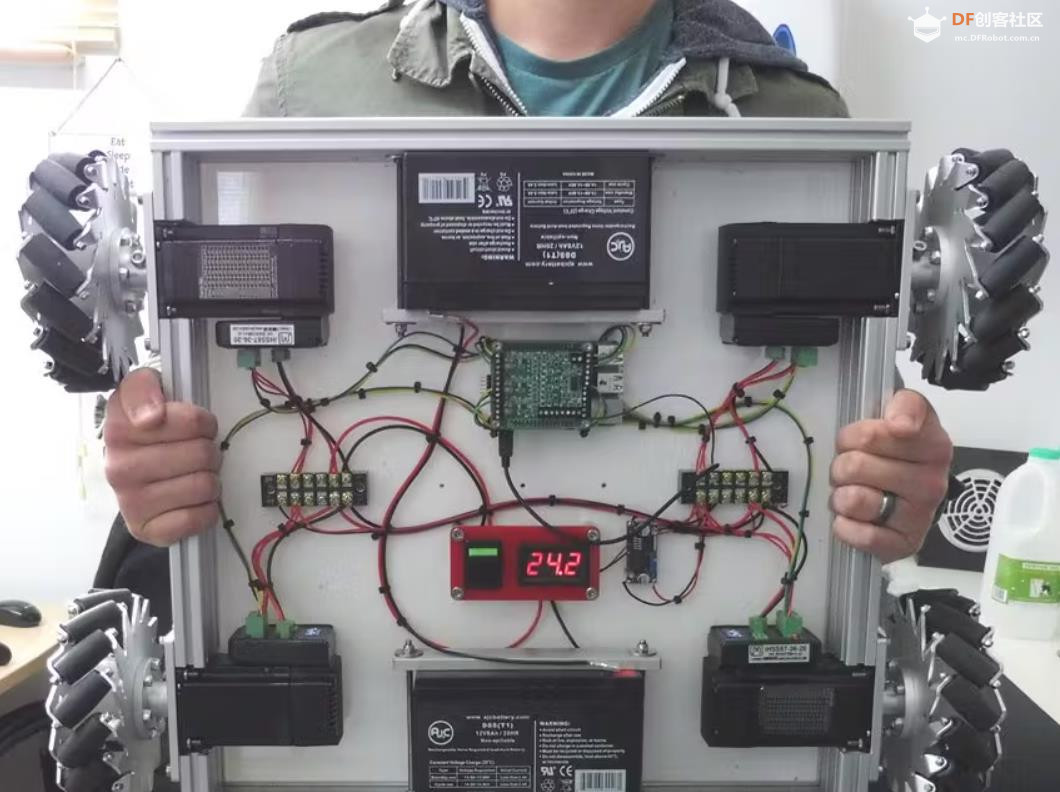 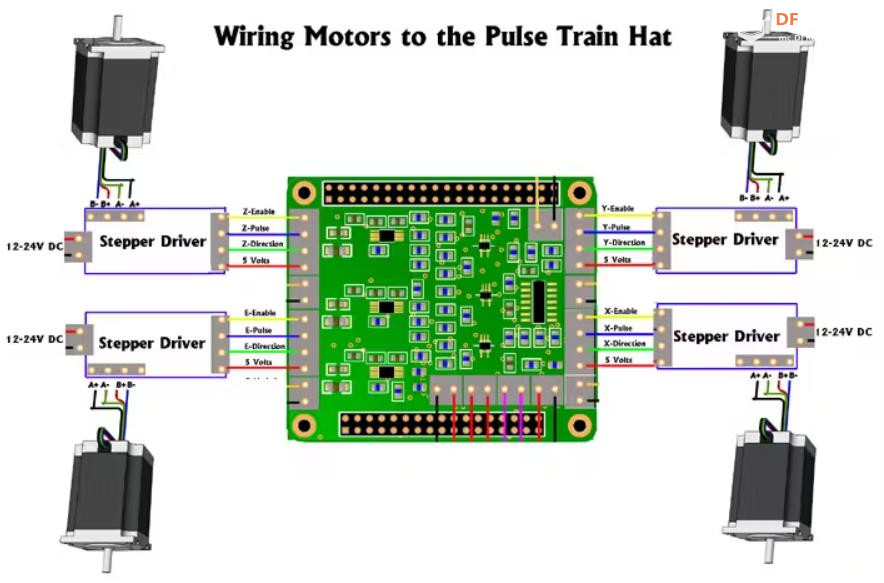 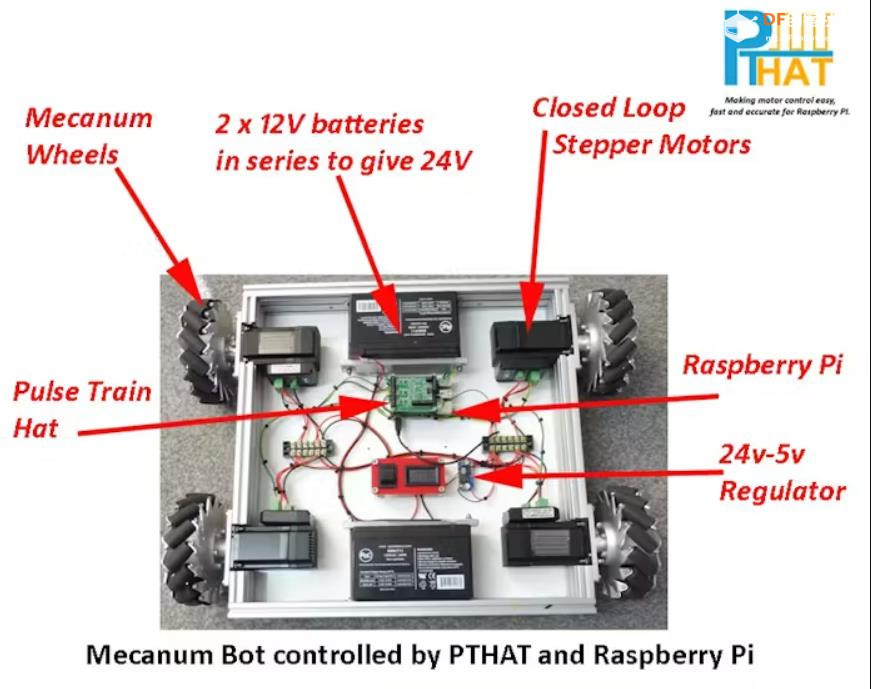 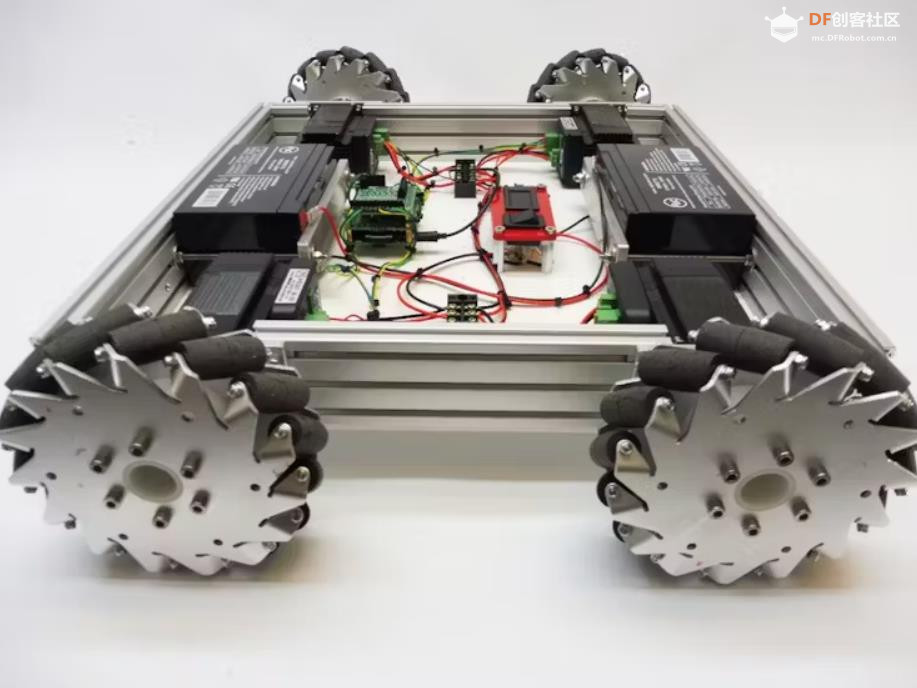  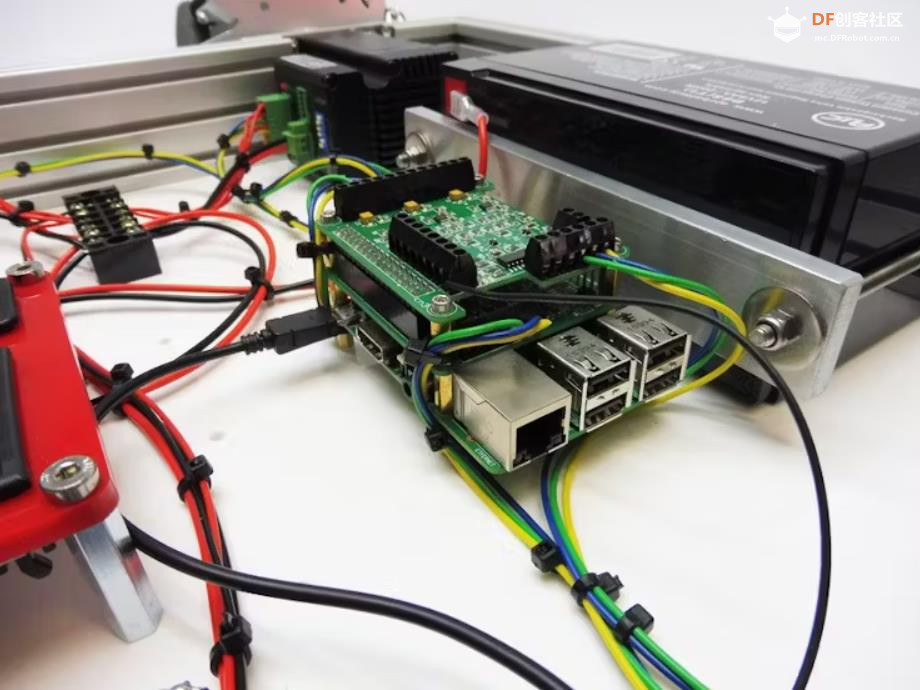 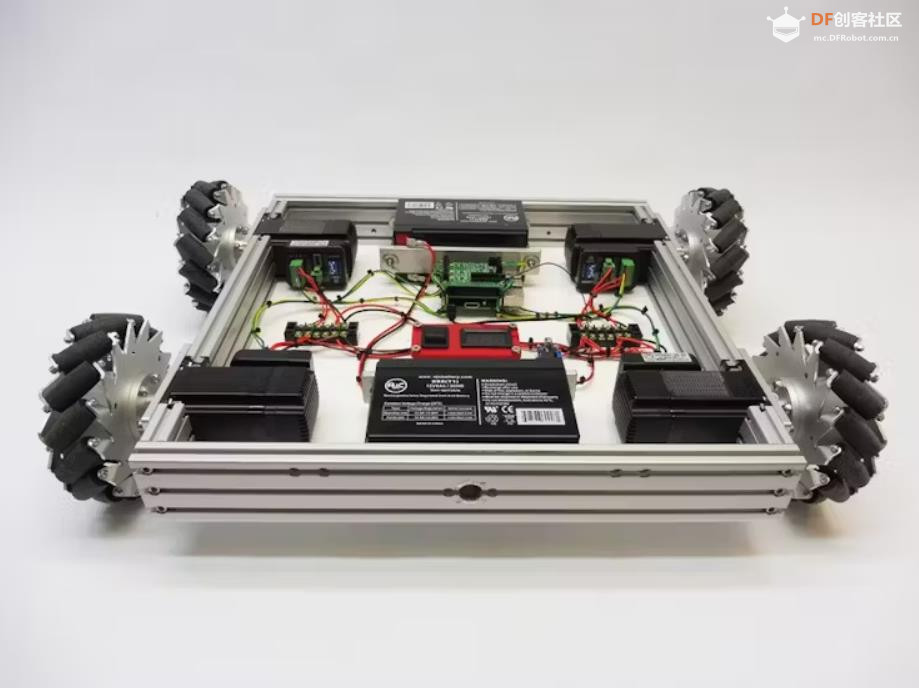 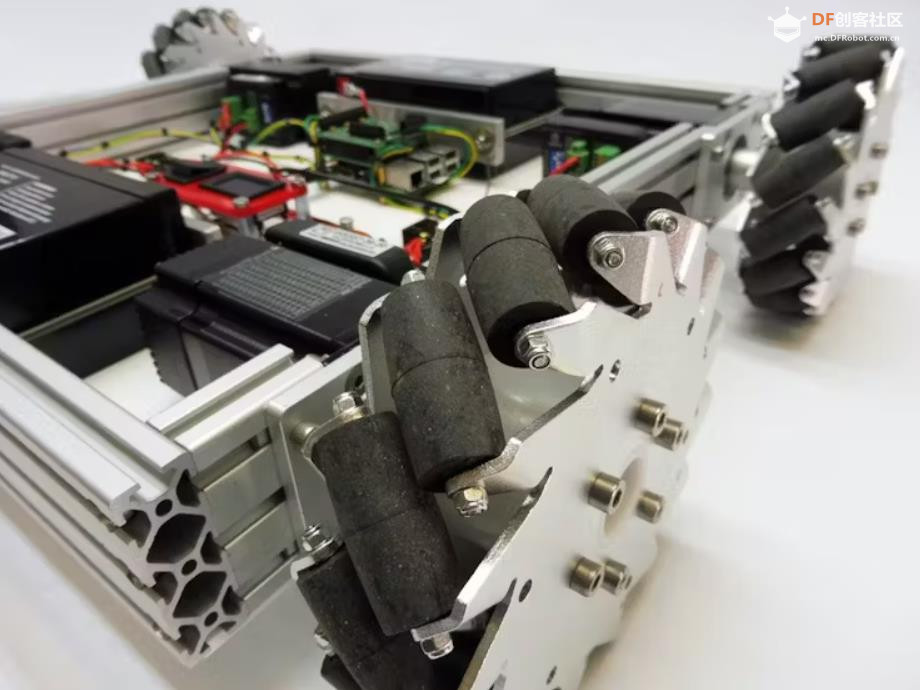 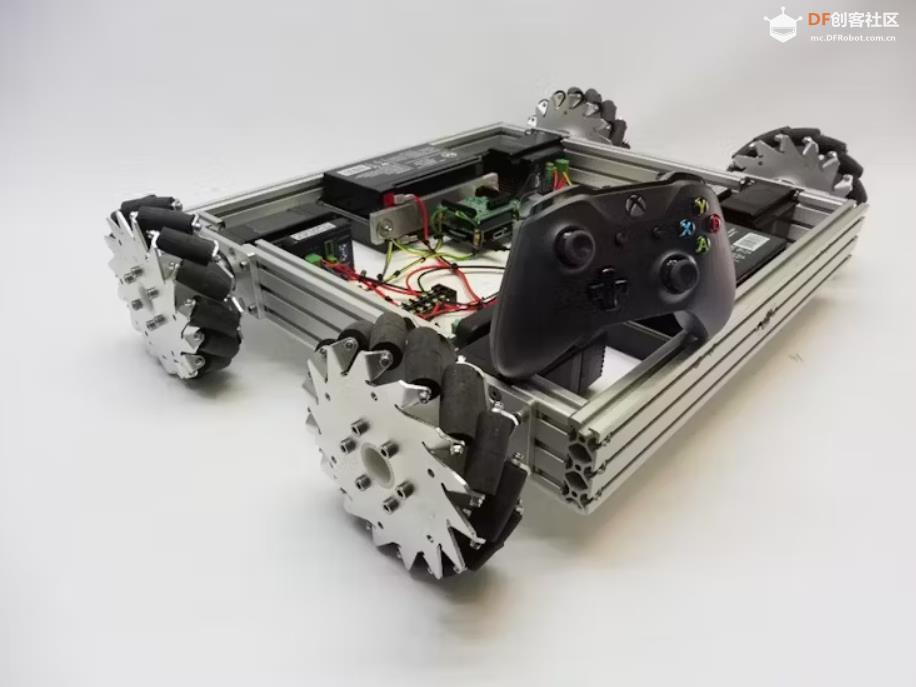 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2025 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






