|
28| 11
|
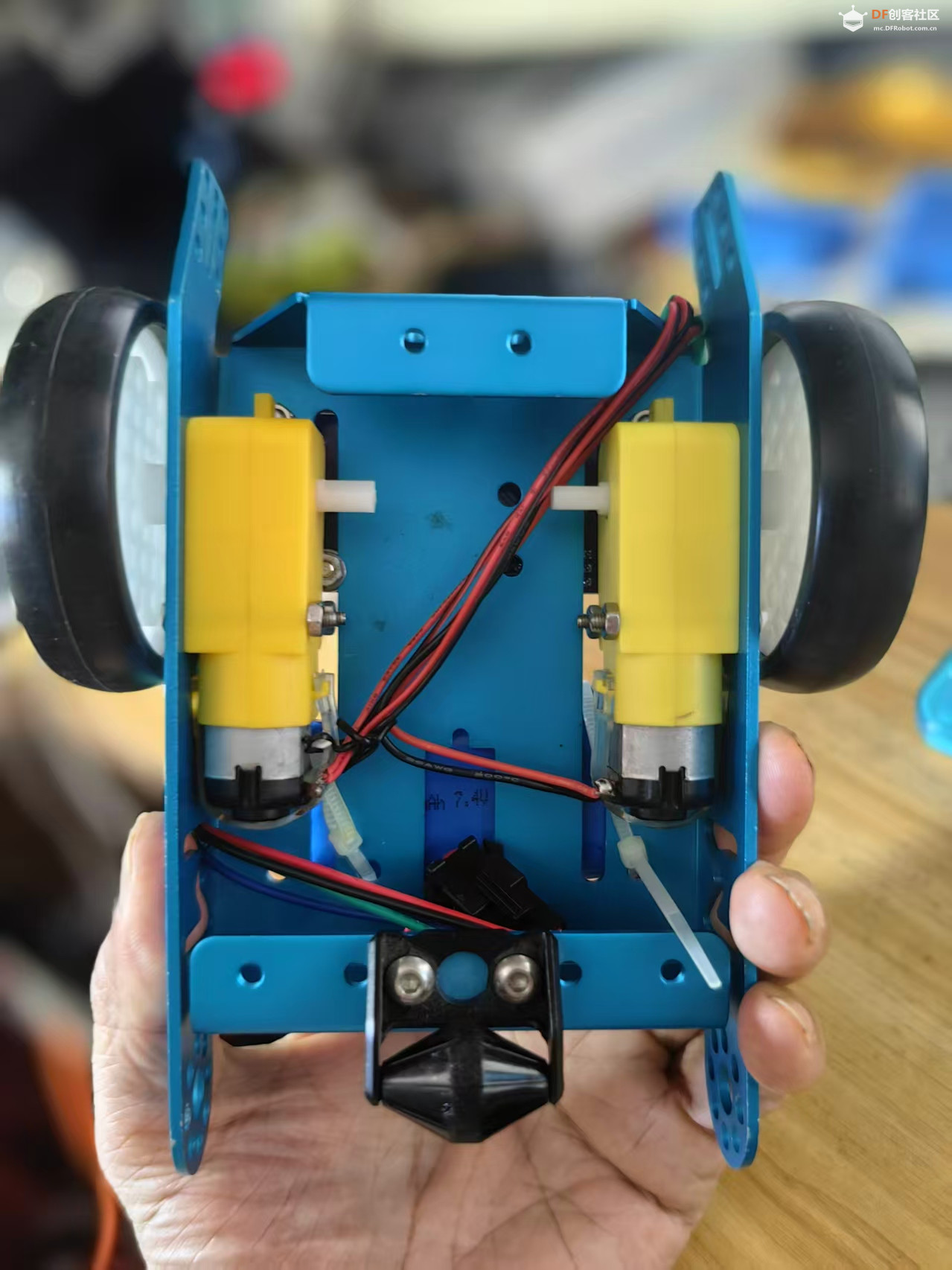
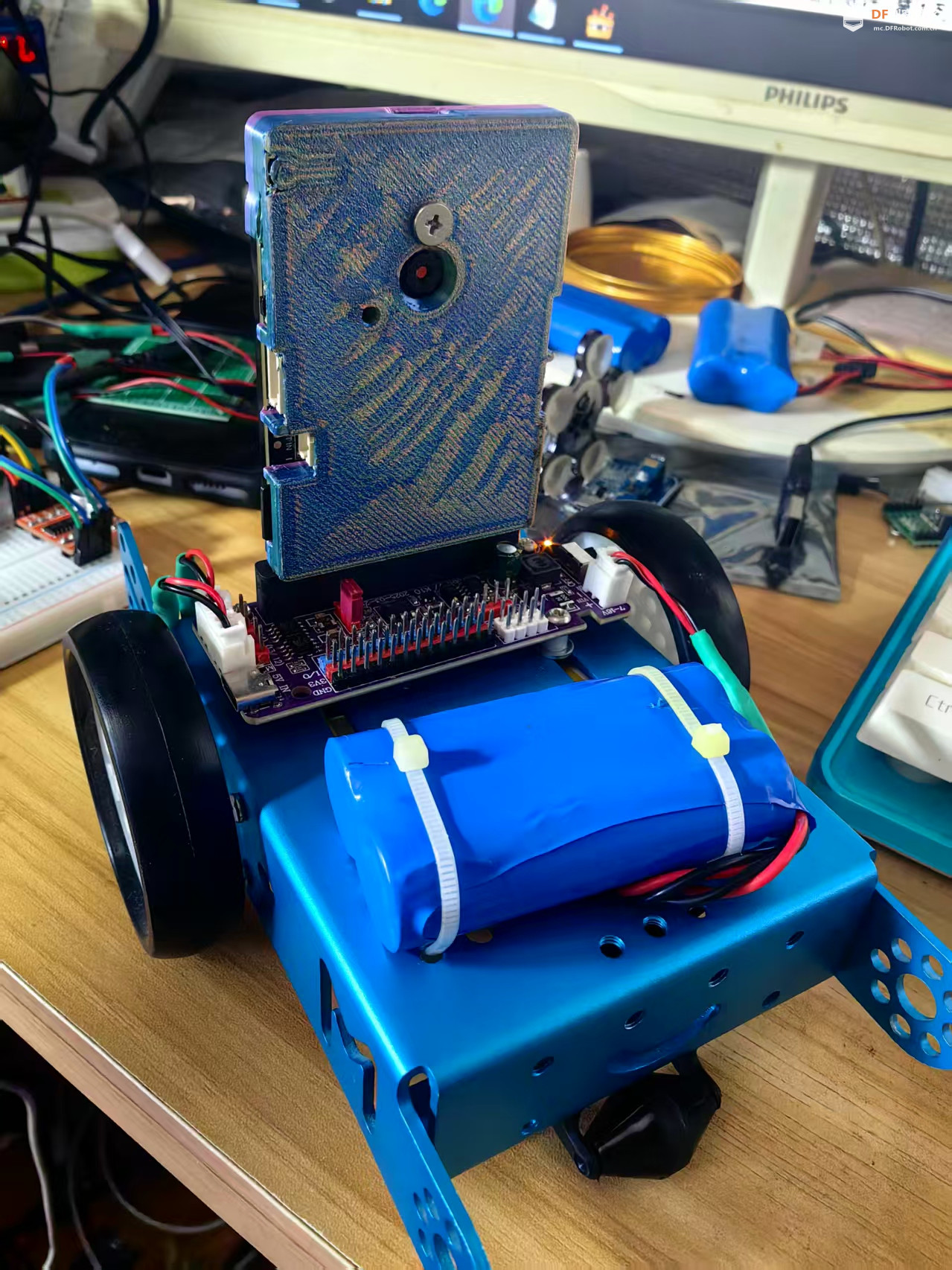
[K10教程] 【花雕动手做】行空板 K10 之 TT 马达差速 M 底盘小车二号 |
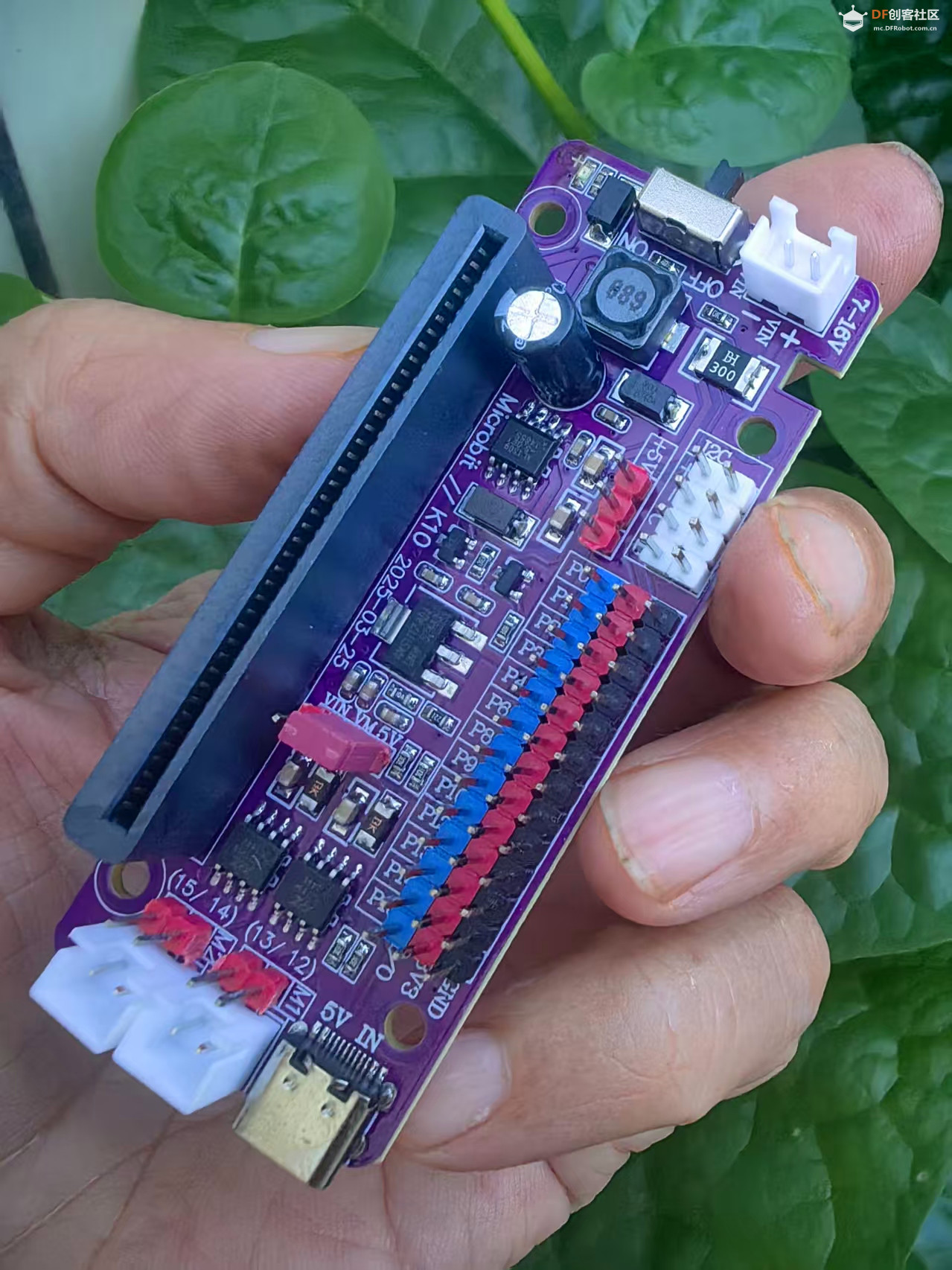
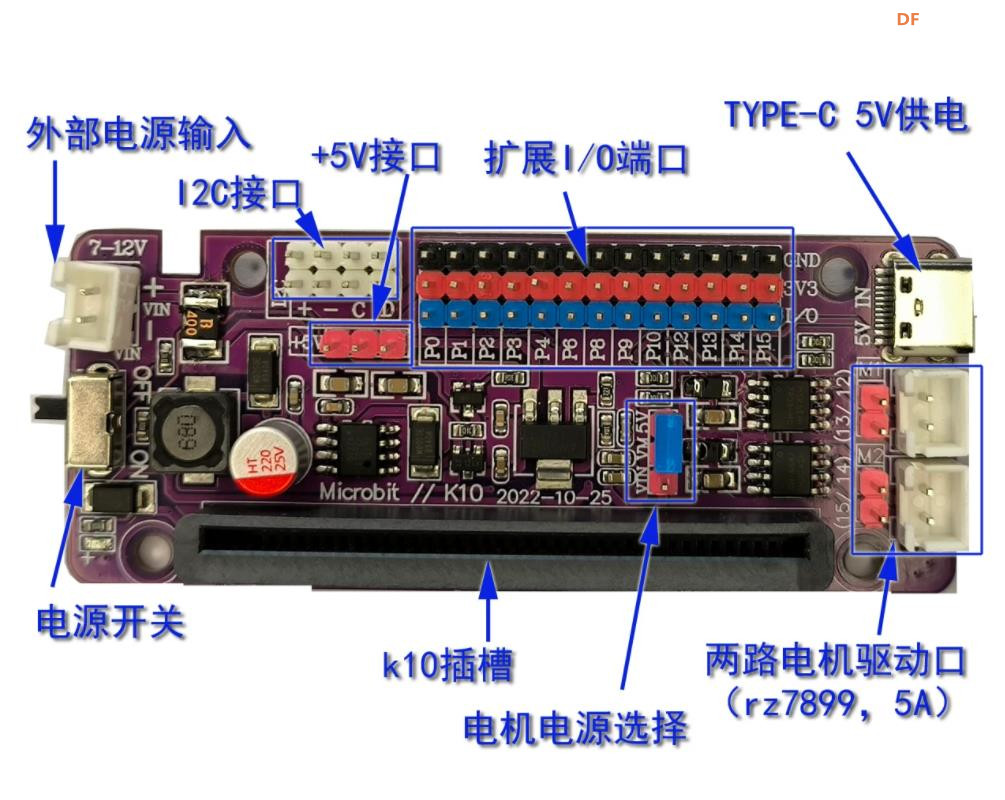
 行空板K10是一款专为快速体验物联网和学习人工智能而设计的开发学习板,100%采用国产芯片,知识产权自主可控,符合信息科技课程中编程学习、物联网及人工智能等教学需求。该板集成2.8寸LCD彩屏、WiFi蓝牙、摄像头、麦克风、扬声器、RGB指示灯、多种传感器及丰富的扩展接口。凭借高度集成的板载资源,教学过程中无需额外连接其他设备,便可轻松实现传感器控制、物联网应用以及人脸识别、语音识别、语音合成等AI人工智能项目。 主要特点 集成摄像头&内置算法,可进行离线图像检测 集成麦克风&内置算法,可进行离线语音识别 集成扬声器&内置算法,可进行离线语音合成 2.8寸彩色屏幕,数据展示更清晰 集成度高,利于教学 接口丰富,兼容软件多,扩展性好 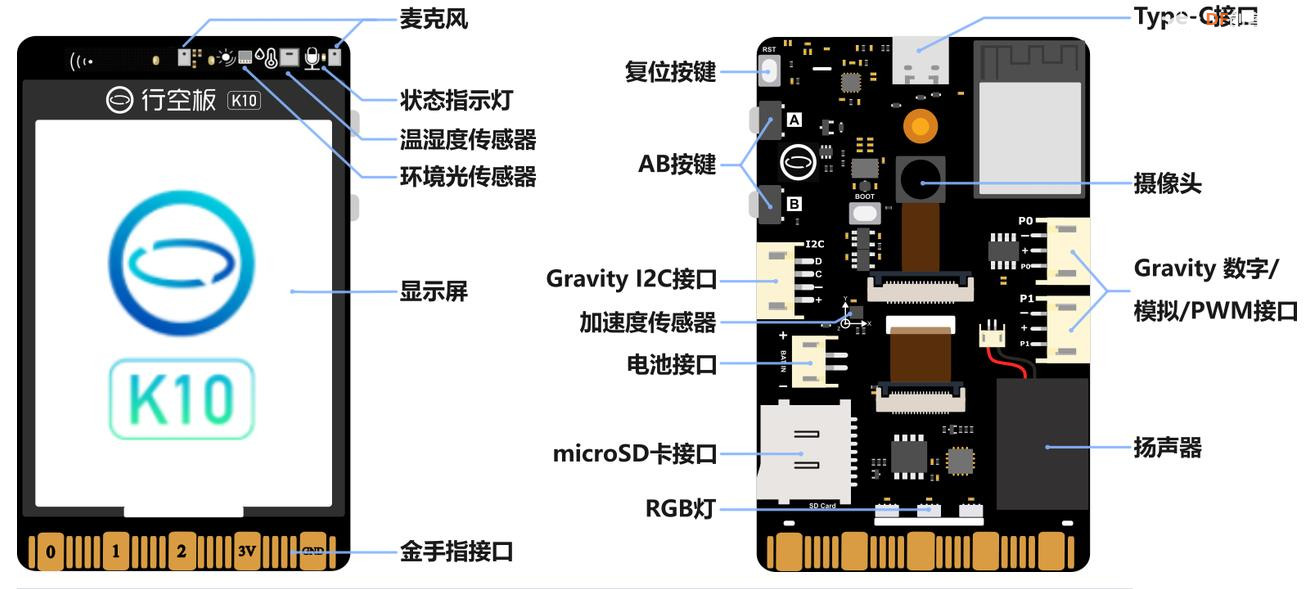 |
|
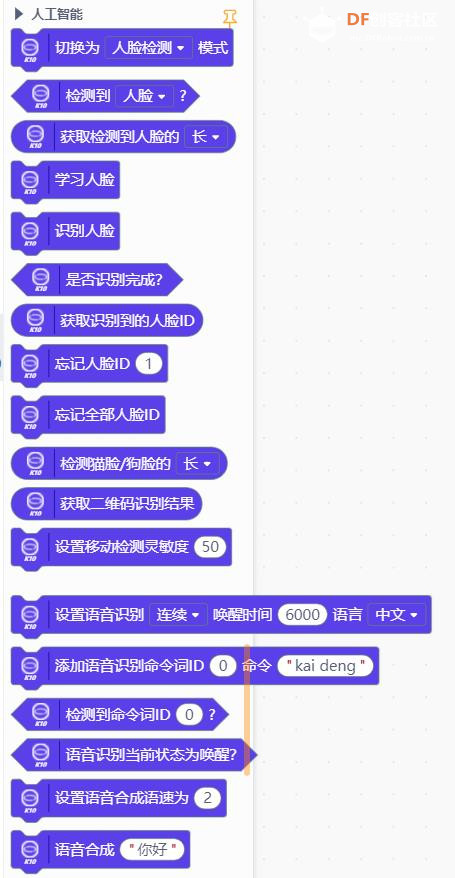
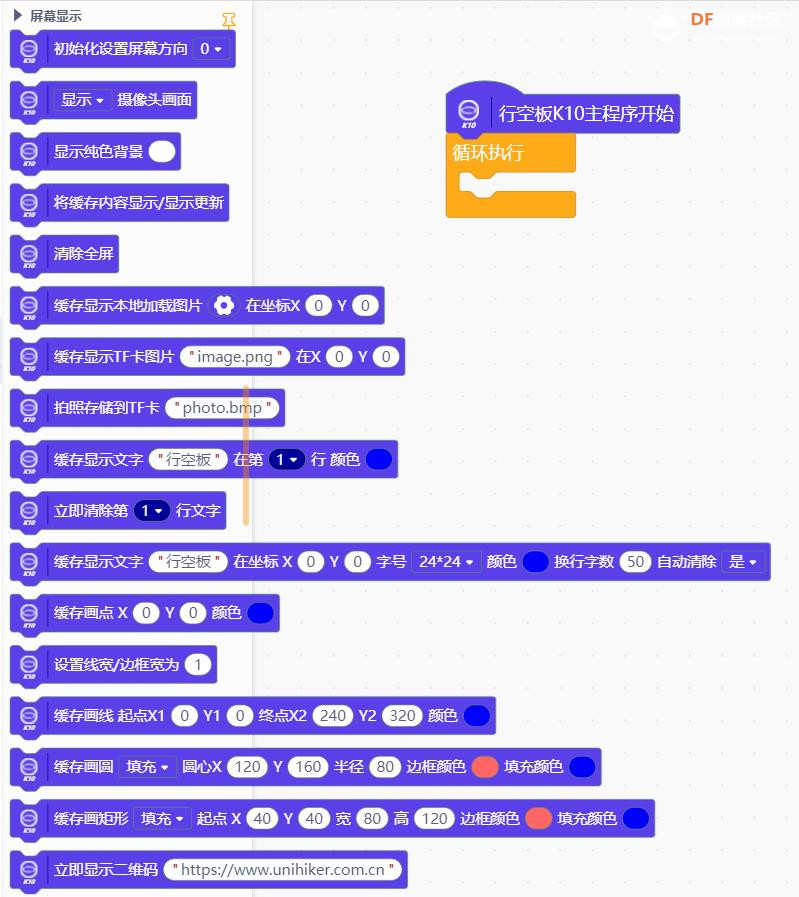
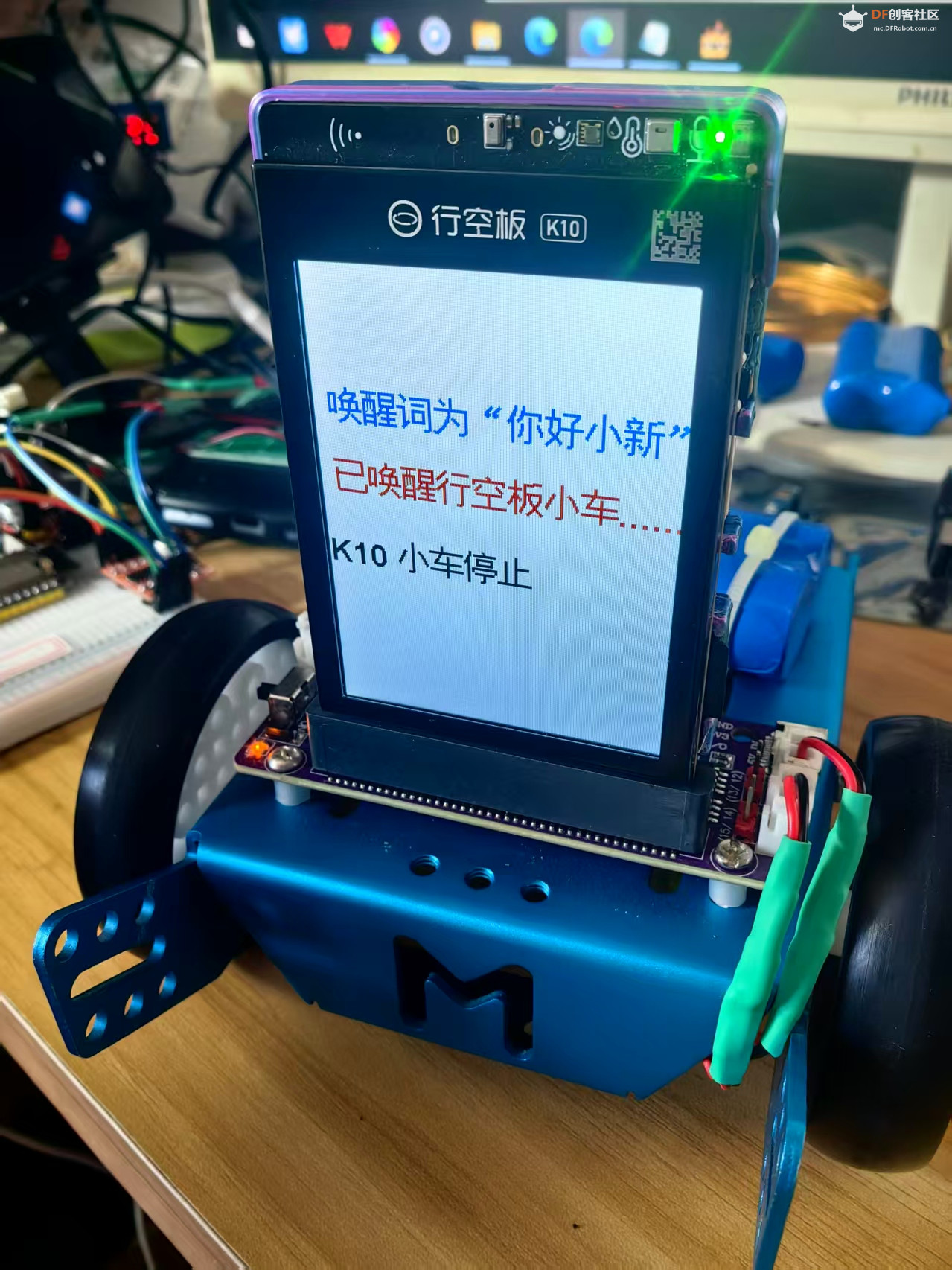
知识点:语音识别(ASR) 一、什么是语音识别(ASR) 语音识别英文缩写是 ASR(Automatic Speech Recognition),简单来说:让单片机、电脑听懂人说话,把麦克风采集到的声音信号,转换成文字或者指令。 分为两大类: 在线语音识别:需要联网,把声音上传到云端服务器解析,识别词汇量巨大; 离线语音识别:不需要 WiFi、不需要网络,语音模型预先存放在芯片内部,本地直接处理声音,适合单片机、行空板、Arduino 这类硬件。 你代码里使用的就是离线本地 ASR 语音模块。 二、离线语音模块核心功能(对应你 K10 代码) 1. 两种工作模式 (1)持续拾音模式 CONTINUOUS 麦克风一直处于收音状态,不间断监听声音,专门用来做语音唤醒。 对应代码:asr.asrInit(CONTINUOUS, CN_MODE, 12000); (2)按键触发模式 按下按键才开始录音识别,省电,一般用于命令词识别。 2. 语言模式 CN_MODE CN_MODE:中文模式,只识别汉语; EN_MODE:英文模式,识别英语。 本程序开启中文识别,用来识别唤醒词:你好小新。 3. 灵敏度阈值(第三个参数 12000) 数值代表声音检测灵敏度: 数值越大:越不容易被环境杂音误触发,抗干扰强; 数值越小:轻声说话就能识别,但是容易被噪音误唤醒。 12000 属于中等灵敏度,适合室内环境使用。 三、语音唤醒技术(本项目核心) 1. 唤醒词机制 唤醒词就是开门密码。模块平时处于低功耗监听状态,只监听这一句话,其他普通对话会直接忽略。 只有说出预设唤醒词(你好小新),模块才会被 “唤醒”,进入待命状态,之后才可以识别后续控制指令。 2. 代码里的唤醒检测函数 ```cpp asr.isWakeUp() ``` 检测到唤醒词,函数返回 true; 没有检测到唤醒词,返回 false。 3. 模块状态标志 ```cpp asr._asrState ``` 值 = 0:语音模块正在启动、模型加载中,暂时无法工作; 值 ≠ 0:初始化完成,可以正常收音识别。 程序中用 while 循环等待模块就绪,避免硬件未启动造成程序崩溃。 四、硬件运行完整工作流程 上电初始化行空板主板与显示屏; 启动 ASR 语音芯片,加载离线语音模型; 等待语音模块就绪; 屏幕打印实验标题; 模块持续收音,安静待机,只监听唤醒词; 使用者说出:你好小新; 程序捕捉到唤醒信号,屏幕切换文字提示 “已唤醒行空板”; 没有听到唤醒词,则一直显示唤醒词提示语句; 每秒刷新一次屏幕,并清除文字,防止画面重叠。 五、离线语音识别优缺点 优点 完全离线,不用网络、不用流量; 响应速度极快,话音刚落立刻识别; 单片机就能驱动,成本低,非常适合机器人、智能音箱、门禁、实验教具; 不受网络波动影响,设备在野外也能正常使用。 缺点 词汇数量有限,一般只能预先录入几十条唤醒词 + 控制指令; 对嘈杂环境比较敏感,噪音大会出现识别失败; 无法自由识别任意一句话,只能识别预先烧录好的词语。 六、拓展功能(可以在现有代码上升级) 多级指令识别 唤醒之后,再识别 “开灯”“关灯”“前进”“后退”,控制电机与 LED 灯; 自定义唤醒词 修改库文件,把 “你好小新” 改成 “你好行空板”; 多句话语音交互 唤醒后连续识别多条语音命令; 调节收音灵敏度,解决误唤醒或者识别不到声音的问题。 七、容易遇到的常见问题 识别不到唤醒词 调低阈值数值,靠近麦克风,降低环境噪音。 无缘无故自动唤醒(误触发) 把灵敏度数值调高,提高抗干扰能力。 程序卡死在初始化循环 语音模块接线异常,串口通信断开,导致模块始终处于未就绪状态。  |
|
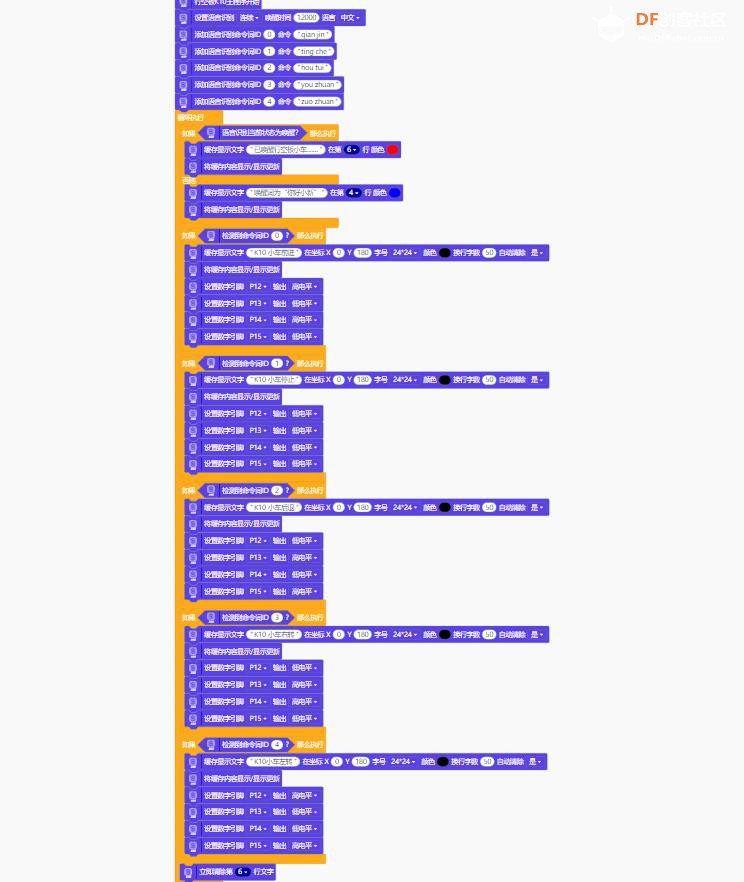
【花雕动手做】行空板 K10 系列实验之TT马达双路差速智能小车方案二号M底盘 实验开源代码 |
|
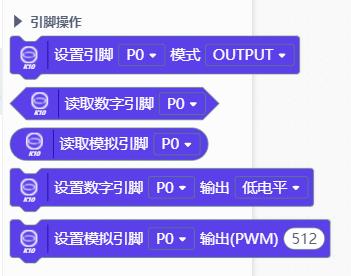
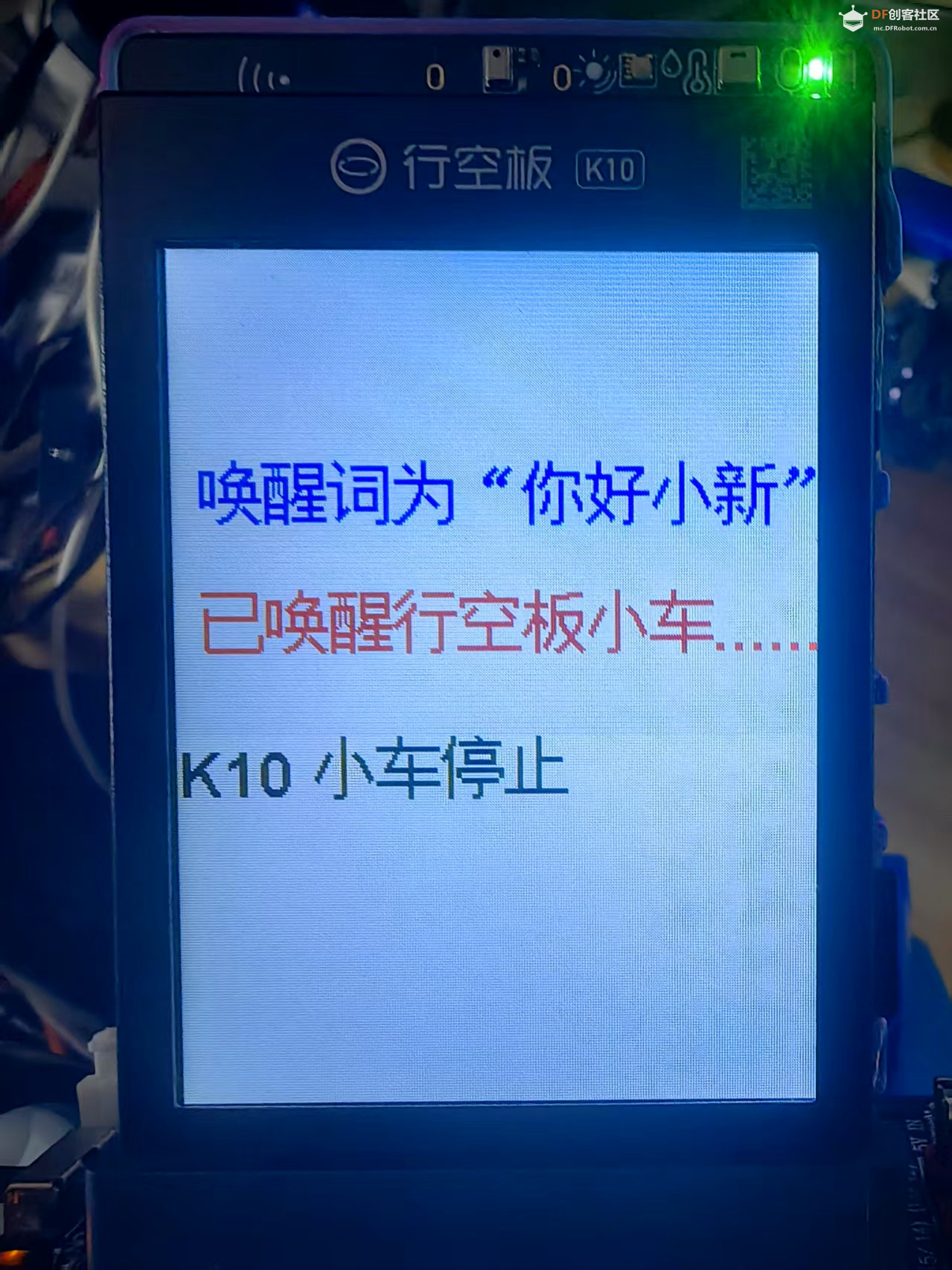
代码解读 一、项目整体功能 该程序运行在行空板 K10,搭配离线 ASR 语音模块、L298N/L293D 电机驱动,实现语音控制两轮差速小车: 唤醒固定口令:你好小新; 5 组语音动作:前进、停车、后退、原地右转、原地左转; 行空板 4 路 IO 输出高低电平控制电机驱动,屏幕大号文字实时展示小车运行状态。 二、头文件与硬件对象说明 asr.h:离线语音识别库,提供语音唤醒、自定义拼音指令识别; unihiker_k10.h:行空板核心库,包含屏幕画布绘制、digital_write IO 电平输出函数。 k10:行空板主控对象,管理屏幕、板载 IO 引脚; asr:语音识别对象,处理麦克风收音、人声解析; screen_dir=2:设置屏幕倒置显示。 三、setup () 上电初始化函数(仅开机执行 1 次) 初始化行空板全部底层硬件、通信总线、IO 资源。 语音模块初始化:持续收音、中文识别、12000 抗噪灵敏度;循环等待语音模型加载完成,硬件就绪后再执行后续代码。 按倒置参数点亮 LCD 屏幕,创建绘图缓冲区,所有文字先缓存再刷新。 提前注册 5 条离线语音口令,语音模块仅能识别预存的拼音。 四、loop () 无限主循环,实时监听语音指令 1. 唤醒状态检测 检测是否识别唤醒词「你好小新」: 唤醒成功:屏幕第 6 行红色文字提示 “已唤醒行空板小车”; 未唤醒:蓝色文字提示唤醒口令; updateCanvas() 将画布内容刷新到实体屏幕。 2. 引脚硬件分配规则 eP12、eP13 → 左电机 M1 方向控制脚 eP14、eP15 → 右电机 M2 方向控制脚 digital_write(引脚, HIGH/LOW):输出高低电平给电机驱动,改变电机转向。 3. 各语音指令动作逻辑 ① qian jin 前进 左右电机同向正转: eP12=HIGH,eP13=LOW;eP14=HIGH,eP15=LOW 屏幕显示:K10 小车前进 ② ting che 停车 四路引脚全部拉低,电机无压差,直接刹车停稳: eP12/eP13/eP14/eP15 = LOW 屏幕显示:K10 小车停止 ③ hou tui 后退 左右电机同向反转: eP12=LOW,eP13=HIGH;eP14=LOW,eP15=HIGH 屏幕显示:K10 小车后退 ④ you zhuan 原地右转 左轮反转、右轮正转,差速实现右转: eP12=LOW,eP13=HIGH;eP14=HIGH,eP15=LOW 屏幕显示:K10 小车右转 ⑤ zuo zhuan 原地左转 左轮正转、右轮反转,差速实现左转: eP12=HIGH,eP13=LOW;eP14=LOW,eP15=HIGH 屏幕显示:K10 小车左转 4. 屏幕清理 清空第 6 行及下方全部文字,清除上一轮状态,避免新旧文字重叠残影。 五、电平与车辆动作对照表 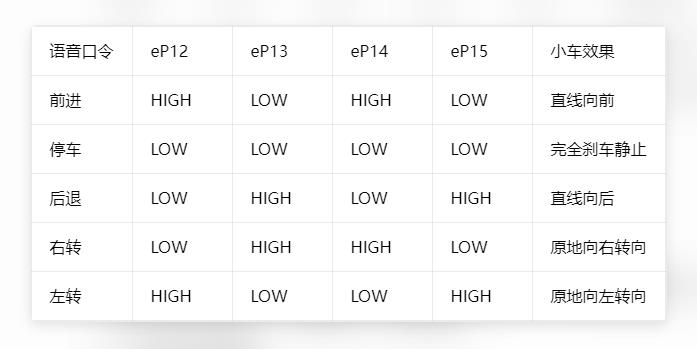 六、完整运行流程 设备上电,初始化主板、语音模块,等待语音芯片加载完成; 初始化倒置屏幕、创建画布,录入 5 条小车语音口令; 麦克风持续监听唤醒词 “你好小新”; 唤醒后说出对应语音口令,四路 IO 同步输出对应电平驱动电机,屏幕同步显示运行文字; 循环自动清空屏幕文字,持续等待下一条语音指令。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶










 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






