|
12361| 12
|
DRI0034 ManShow-RC1 (闷骚版机器人控制器)资料整理贴 |
|
M a n S h o w – RC1 简介 ManShow-RC1是一款结构高度集成,专为人形、仿生及机械手等机器人量身定制的控制器(当然亦可用于其它机器人系统),集成Arduino UNO R3及24通道的SoftServo舵机控制系统。丰富的Arduino资源、标准化的传感器接口及灵活高效稳定的PWM类型舵机控制,极大程度地加速了机器人原型系统的开发。 规格 电压范围 :DC6 ~ 12V (电源输入:Mini-T插头或JST-PH2.0-2P) 尺寸 :58.2mm * 62.2mm * 23.5mm(长*宽*高) (注:电路板的尺寸及安装孔遵循Gicren Robotics and Electronics 的规范,但ManShow-RC1属于Gicren产品系中的衍生物,没有 完全遵循其标准产品的规范。) 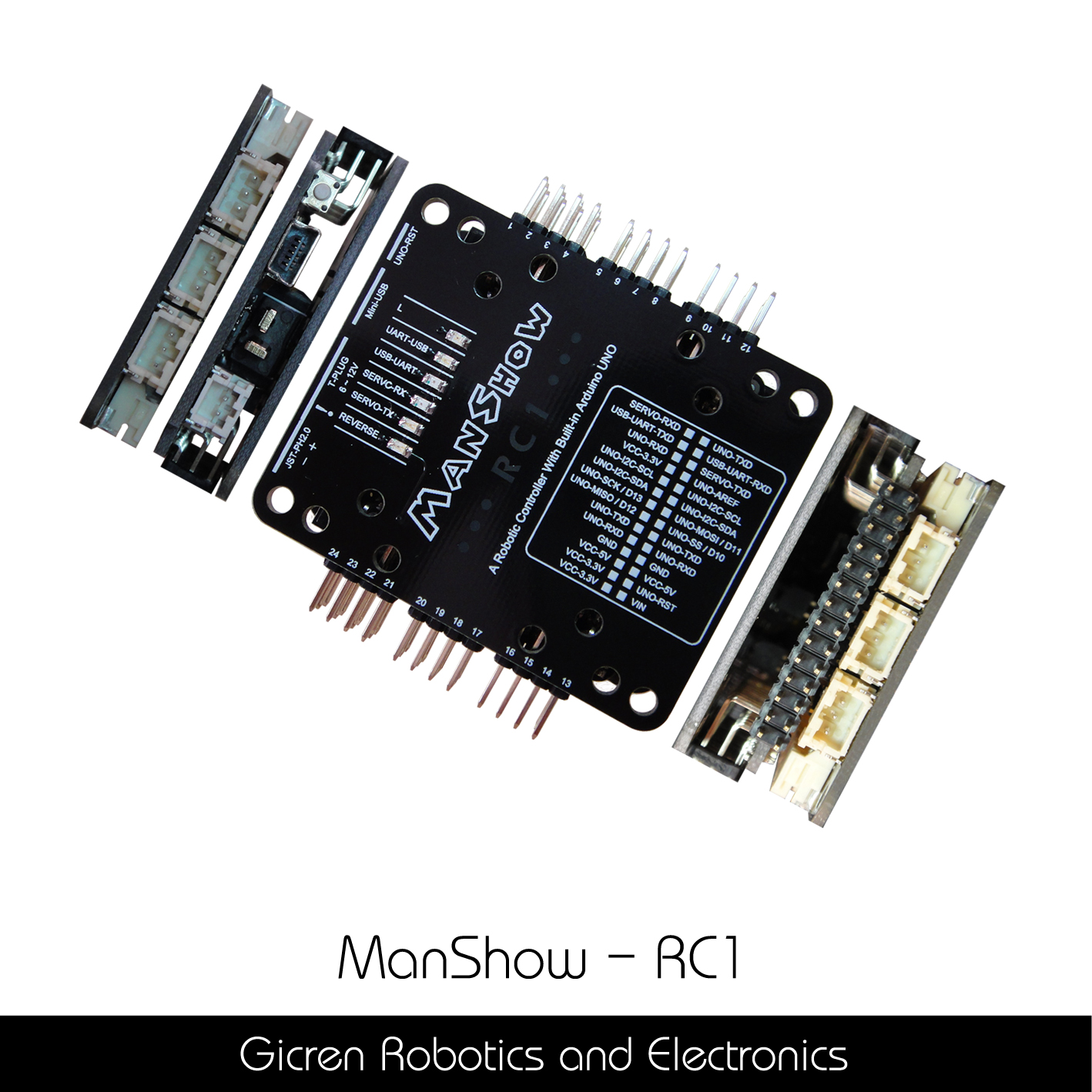 |

(机器人控制器)ManShow-RC1(编辑版本-E14).pdf
851.46 KB, 下载次数: 8592

6.09 KB, 下载次数: 8457
gicren 发表于 2015-1-18 22:44 没那么简单吧~你的锂电池再牛掰也是3.7V的电芯,让舵机动起来,至少要2节电芯串联到7.4V,才能实现,但是电压基本都超出了我们常用的4.8V~6V舵机(还有到7.2V和9V的,不过不常用);电压过高对舵机的控制芯片应该不是啥好事吧...还有就是,当你电池快使完时,就会出现各种奇葩现象,什么机器重启,烧舵机,对于有经验的老手来说不是啥难事,但是对于小白来说就会头大,根本不知道从哪里出的问题,这时就会第一时间指向这块驱动板的问题,这样的事情,我遇到过几次,都要耐心的给他们讲解出现问题的原因啥的,哎,耗时耗力啊 |
Eric 发表于 2015-1-18 23:18 1、4.8~6V的舵机,一般都是最常见的航模舵机,其角度范围一般都没有180度,有的甚至只有60度左右,所以不便于机器人使用。 2、两节锂电池标称是7.4V,充满电的时候在8~9V之间,这个对机器人舵机是无碍的。 3、电池在临界状态的时候,确实会出现一些问题,例如重启,所以ManShow-RC1内置电源电压检测,用户可以根据实际情况实现欠压保护。 4、我遇到过的烧舵机问题,很多时候是错误信号导致的,同时舵机本身又是单周期信号锁存的,这种舵机本身就不适合机器人控制,机器人应用中推荐周期性信号锁存的舵机,在任意时刻可以通过关闭PWM信号让舵机卸载,否则损坏的隐患都非常的大。 5、机器人系统一般都比较讲究紧凑性,要是身上挂两个电池,实在很不方便,同时充电也很麻烦。任何一种方式肯定是有利有弊的,所以只能根据实际需求而选择。 |
|
本帖最后由 gicren 于 2015-1-21 13:44 编辑 我也只是说了一种间接的原因而已,;P 其实舵机损坏的直接原因用通俗的话来表达,就是:转到了不该转的地方,堵转而毁。堵转又分为以下两种情况: 1、因内部机械限位而堵转,这种情况个人认为跟舵机厂家有直接的关系。大家都知道,舵机最早是出现在航模、车模、船模中,这些应用对舵机没有大角度的严格要求,内部的机械限位一般是180度多一点。后来才衍生应用在机器人中,很多厂家并没有更改模具,仅是修改了程序,增大舵机的伺服角度,这样做是非常危险的,机械余量非常小,在发送极限位置的PWM信号时,特别容易堵转(主要原因是电位器自身误差、安装误差、ADC误差,等)。有些舵机集诸多不良基因于一体,首先单周期信号锁存,其次在刚上电时,接收到的第一个脉冲信号,即使超过极限控制量,也会以极限控制量来替代(不知道为何要这么做)。当电池快没电的时候,初始化瞬间,所需的电流比较大,电池提供不了,导致电压拉低,甚至舵机控制器出现复位,这时是经常出现错误信号的时候,严重则导致舵机直接奔向极限位置,堵转而亡。 2、不是因机械限位而堵转,例如机器人从高处跌落、卡在某位置无法到达目标位置,等等,若不能及时检测、及时卸载,并且舵机内部没有自带保护,很容易损坏。 以个人浅薄的经验,强烈推荐大家使用周期性信号锁存的舵机,模拟舵机都是这种方式的,数字舵机也有很多是这种方式的,购买舵机前应需详细咨询。PS:ManShow-RC1产生的是周期性控制信号,还可以通过修改相应通道的位置寄存器实现灵活断开信号,让舵机卸载,最大程度保护舵机,;P 以上纯属个人鄙见,望大家拍砖指正! |
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶







