|
10535| 11
|
【四轴兴趣小组】骑驴玩儿漂移的烂尾四轴收尾篇(连载) |
|
自从被孙老师拉下四轴的这个深坑后,就被各种坑诱惑着,我,骑驴玩儿漂移又是一个特别不能忍受诱惑的人,因此,各种坑不停的填入,从此,四轴,迷你四轴,船模,车模,3D打印机,Arduino,树莓派,mbed,各种坑都义无反顾的扎入。身在骚中不知骚的感觉。。。。但是每天忙碌的工作赚钱,陪小肥羊(我的家眷),写文档。。。。终于我的各项都进入一个烂尾的阶段,每次都说,今天晚上回家弄,可是到家各种事情感觉自己身不由己有木有啊!?于是乎,各种烂尾,各种拖延症就开始蔓延。。。 请原谅我的慢。。。哈哈 微信群里的各位小伙伴各种四轴升级版本的展示,各种osd各种云台,各种听都没有听过的术语,艾玛,我感到一种前所未有的压力,我在大家的聊天中获悉,我得买买买,剁手剁手再剁手,因此我家里多了一堆mwc和naza,GPS,灯带,桨,无刷,电调,电池。。。。 本来我的想法是好好玩好mwc,让它成为一个稳定又高效的四轴,后来发现大家都转而投向pix,naza。于是我也准备换naza。 回忆有时候是痛并快乐着的。。。 我的mwc第一架四轴消失在视野中的时候,我很淡定,以为我知道,技术不够熟练,一键放飞还是很正常的,所以用他人的失误来弥补自己心中的缺憾,这里躺枪的@微笑的rockets,请不要娇嗔责怪偶,我在一键放飞我的mwc的时候,我心里一直都想着你的大疆精灵有木有。。。。我心里突然平衡了。(偷笑十分钟) 好吧,言归正传,我为此在昨晚回到家,下定决心已定要搞定我的四轴。 因此开始了漫长的询问,查找资料,下载资料,尝试,测试的过程,在整个过程中,我要在这里向@BD6CR兄弟还有@Disluyer兄弟表示我由衷的感谢,在我组装这个烂尾的项目中,他们俩给我了勇气和技术指导,一步步非常详细的指点我如何去安装naza-m-lite,GPS,油门行程校准,下载新固件,升级新固件,下载调参软件,设置参数,连接线缆,设备布线和走位。。。 过程中不断的截图,语音。这些东西都成了一手的资料,非常珍贵,我今天还利用休息时间简单的回顾了一下。 所以在此开贴,准备将我的naza配置过程图文并茂的展示给大家,让更多的朋友参与进来,学习和参考,让那两位兄弟的经验帮新人少走一些弯路。。 做成连载模式,是为了更好的讲解哦。慢慢来,大家不要太心急,每天都有更新。呵呵 在说一边,请原谅我的慢。。。哈哈,享受慢生活带来的愉悦感受吧。 好了,未完待续。 上图镇个楼: 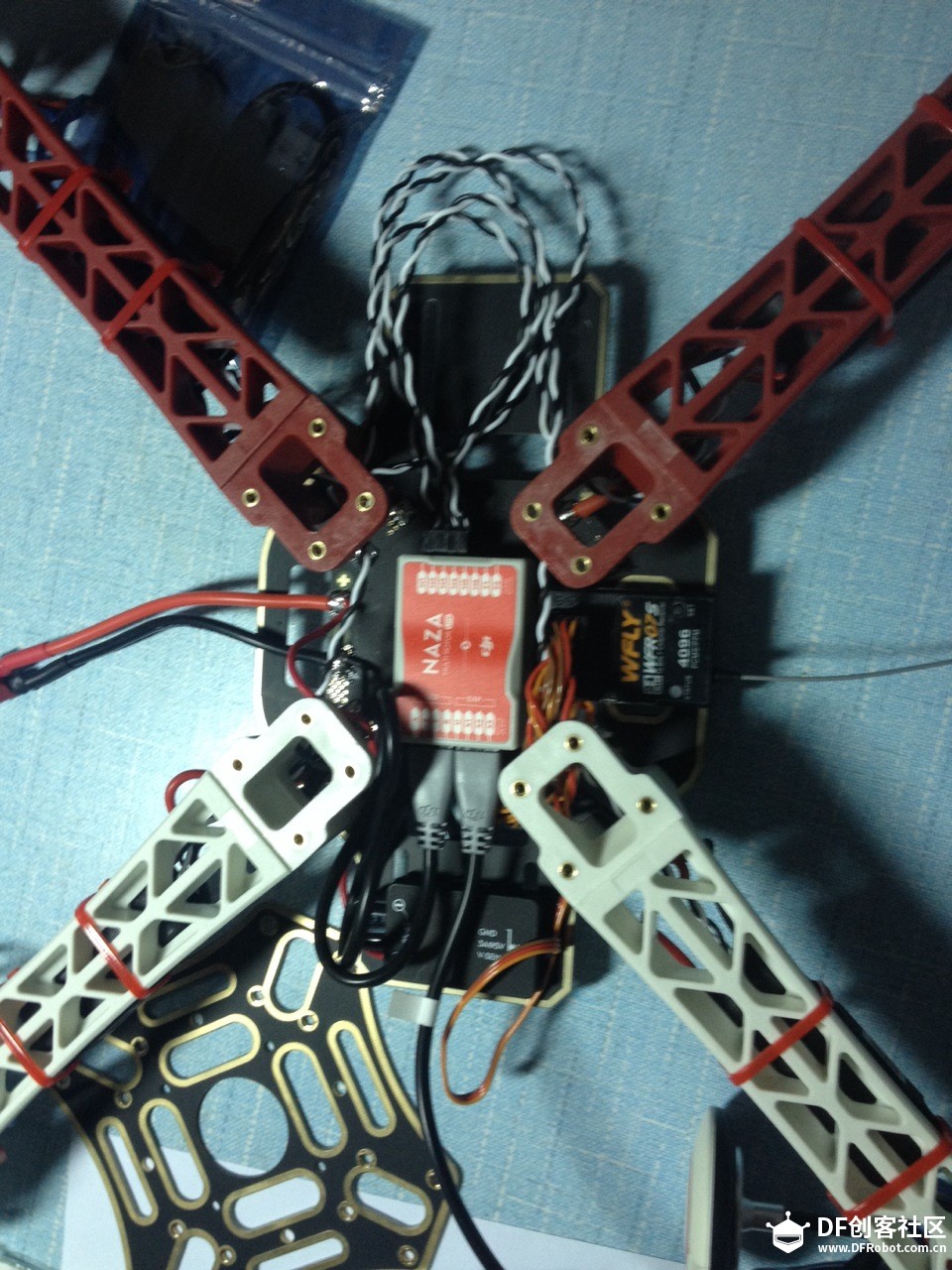 |
|
继续更新: 为了爽飞四轴,实现飞天的梦想,业余时间除了陪伴小肥羊,基本上就在折腾四轴了,虽然我也很多分心的项目,例如瓦力机器人,树莓派,还有mbed,arduino等等,但是每次看到群里的模友们爽飞的小视频,心里就无比的羡慕,我也想飞。 于是,下班回到家就开始进行组装和调试工作了,对于资料我看的真的很少,一是没有时间,二是不知道从何开始,所以就在微信群里询问大家,大家都很热心,特别感谢@BD6CR兄弟,还有@disluyer,@沙漠,@4AGR, @孙浩钦@魔豆, @老马,你们给我我太多的帮助,感激涕零。。他们有的耐心的给我讲解组装方法,指引我前进的道路,有的给我精神上支持,仿佛给我duang就加上了强击光环和持久光环,让我能够在解决问题的道路上一路杀出重围。。。。 好了,扯了这么半天,估计各位看官都已经要开始烦躁了。我还是来点儿干货吧。我将我组装四轴的大部分过程展现在这个帖子里面,希望对大家有用,如果有错误的地方,还请大家指出来我好修改哦。 先说说设备准备: 下面的一段型号和说明来自:sb-dji.com的一篇文章:http://www.sb-dji.com/?p=5097 机架:飞行器机体及负载安装平台。 常见型号:XAircraft XA650、DJI F450 2、飞行控制器:负责处理飞行器一切姿态控制,所有输入输出信号都经过飞行控制器处理。常用飞行控制器都包含GPS及地磁传感器模块,可以完成定点悬停,自动返航等一系列功能。 常见型号:零度 X4~6、XAircraft SUPERX、APM、DJI NAZA、WKM、A2 3、无刷电调:用于将飞行控制信号转变为电流控制输出给电机,实现无刷电机的加速和减速。 常见型号:好盈30~40A、ZTW 30A 4、无刷电机:驱动螺旋桨,并通过加速和减速完成姿态控制。 常见型号:朗宇4112、DJI 2212、XA 4822 5、正反螺旋桨:输出提供升力及扭力,通过正桨与反桨抵消扭力。 常见型号:APC MR系列、DJI 9443 6、为飞行器所有部件供电。 常见型号:富力 14.8V 25C 5000MA、格式 11.1V 25C 2600MA 我的设备是:遗留的f450机架(带底板),还有四个好赢的铂金30A电调,四个朗宇980kv的2212无刷电机,一个naza-m-lite的飞控+GPS套装,一个天地飞7通的接收机,还有一个天地飞7通的美国手遥控器,电池不知名wild scorpion,野蝎?不知道好像买的时候才35元,还有以前遗留的B6平衡充电器。 大致我将组装四轴的步骤分为: 1. 拆箱(废话) 我收到naza-m-lite的飞控和GPS后,激动了一下,做工真的不错,外观很好看,DJI赞一个,华强北还是出人才的。哈哈,三下五除二,就拆掉了所有的包装。这个如果你不会的话,我可以收费指导你暴力拆解的美学艺术。   2. 焊接电调 焊接这个活儿,就是有点儿小技巧的,我焊接的时候,由于只有一个尖头的焊枪,所以,等到预热好以后,先在底板上焊上锡,然后给电源线焊上锡,然后焊枪按住电源线,压在底板上,快速上锡,这样,焊锡就很快将电源线和底板融为一体了,动作要快,然后快速移走焊枪,吹一下,就可以焊好了。我手里拿的两根线是gps上的,直接焊接在主电源上就好。 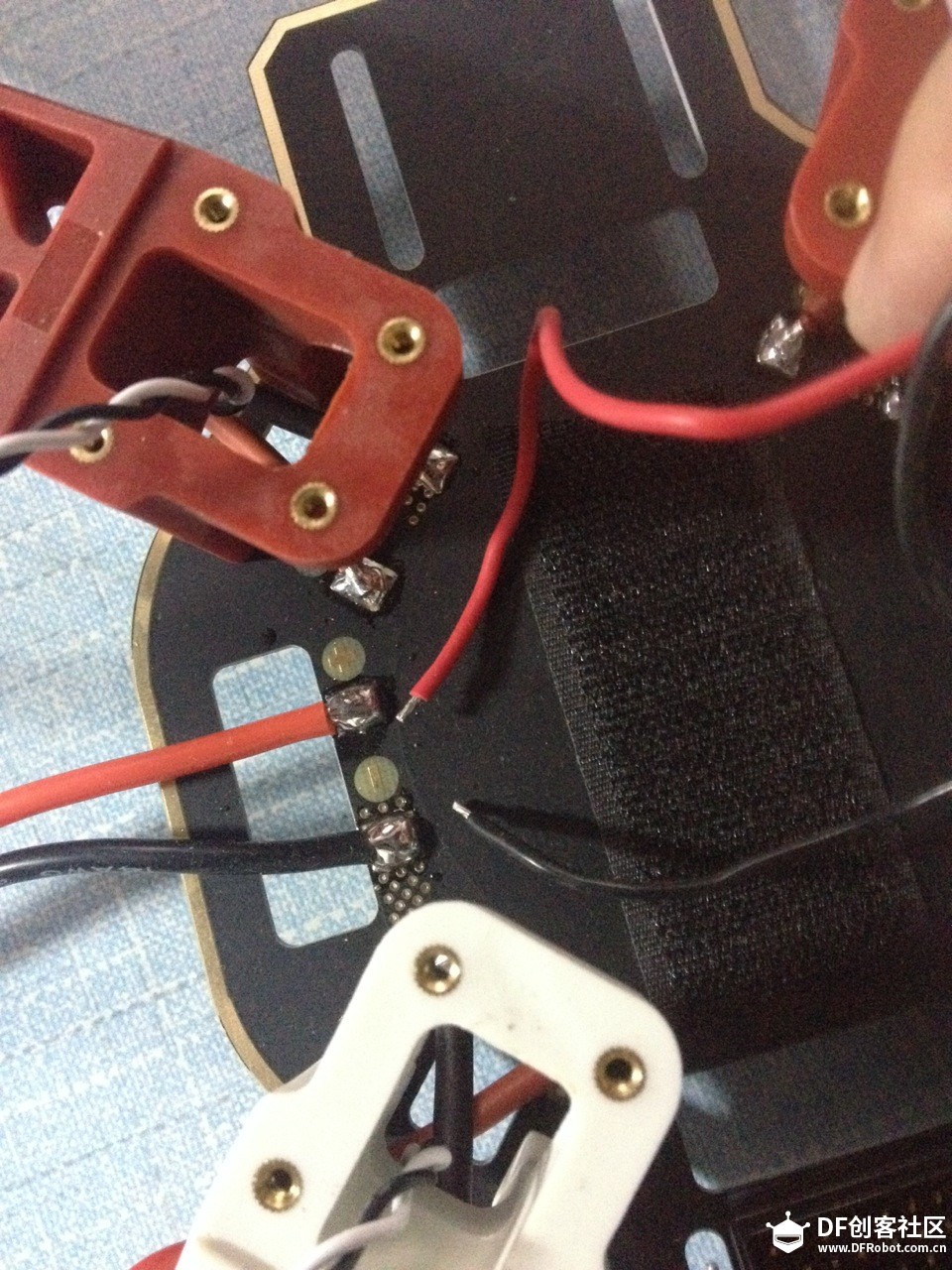 焊接好后是这样的 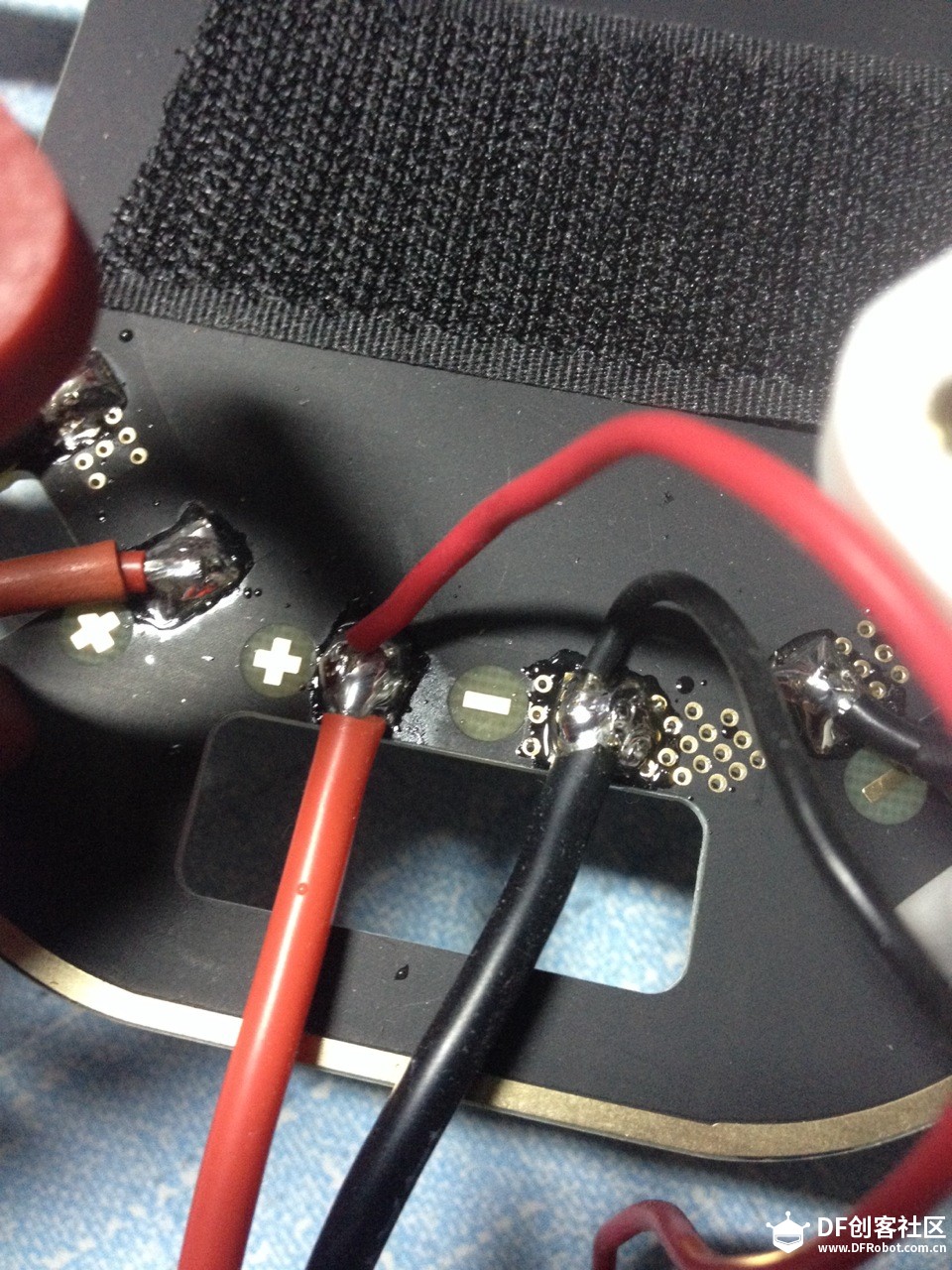 3. 安装飞控 飞控需要安装在底板的正中间,我还专门用尺子量了一下,然后在飞控的背面粘上3M的双面贴纸,然后一定要注意安装的时候,要看清飞控上有个前方指向的标记,这个标记要朝着你机头的位置,我选择的是红色机臂作为整架飞机的前端,就是如下图,请忽略我画功粗糙: 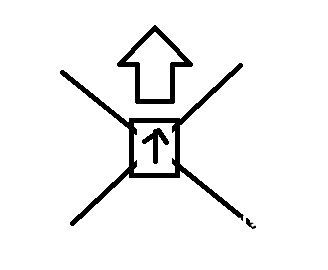 安装完成后,就可以安装机臂了。 安装完成后,就可以安装机臂了。4. 安装机臂 安装机臂的时候,一定要找个平面整齐的桌子,然后以对角线的方式安装螺丝钉,安装的时候注意整个机身的平整,我第一次安装完成后发现四轴一个脚是翘起来的,不水平,后来全部松开了螺丝钉,然后重新安装才安装好。这里耽误了20多分钟。可以算是经验教训吧,希望后面来学习的小白不走弯路了。 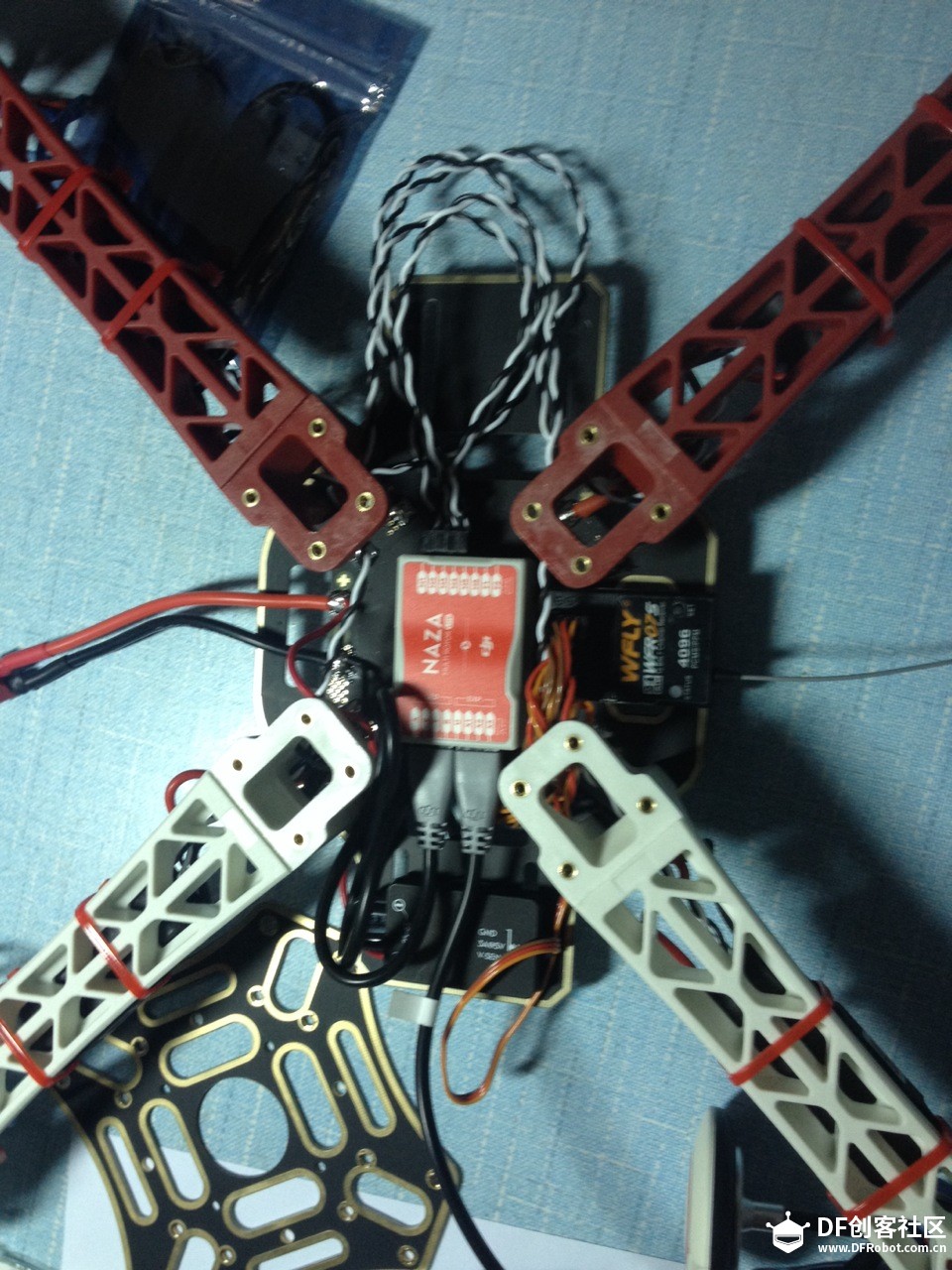  这个手持的好像是电调的协调器?不知道了,反正上面标着接x3,直接插入naza飞控的x3接口。 5. 接线及捆绑电调 然后将线缆理顺了,按照顺序扎好,我先扎好了电调 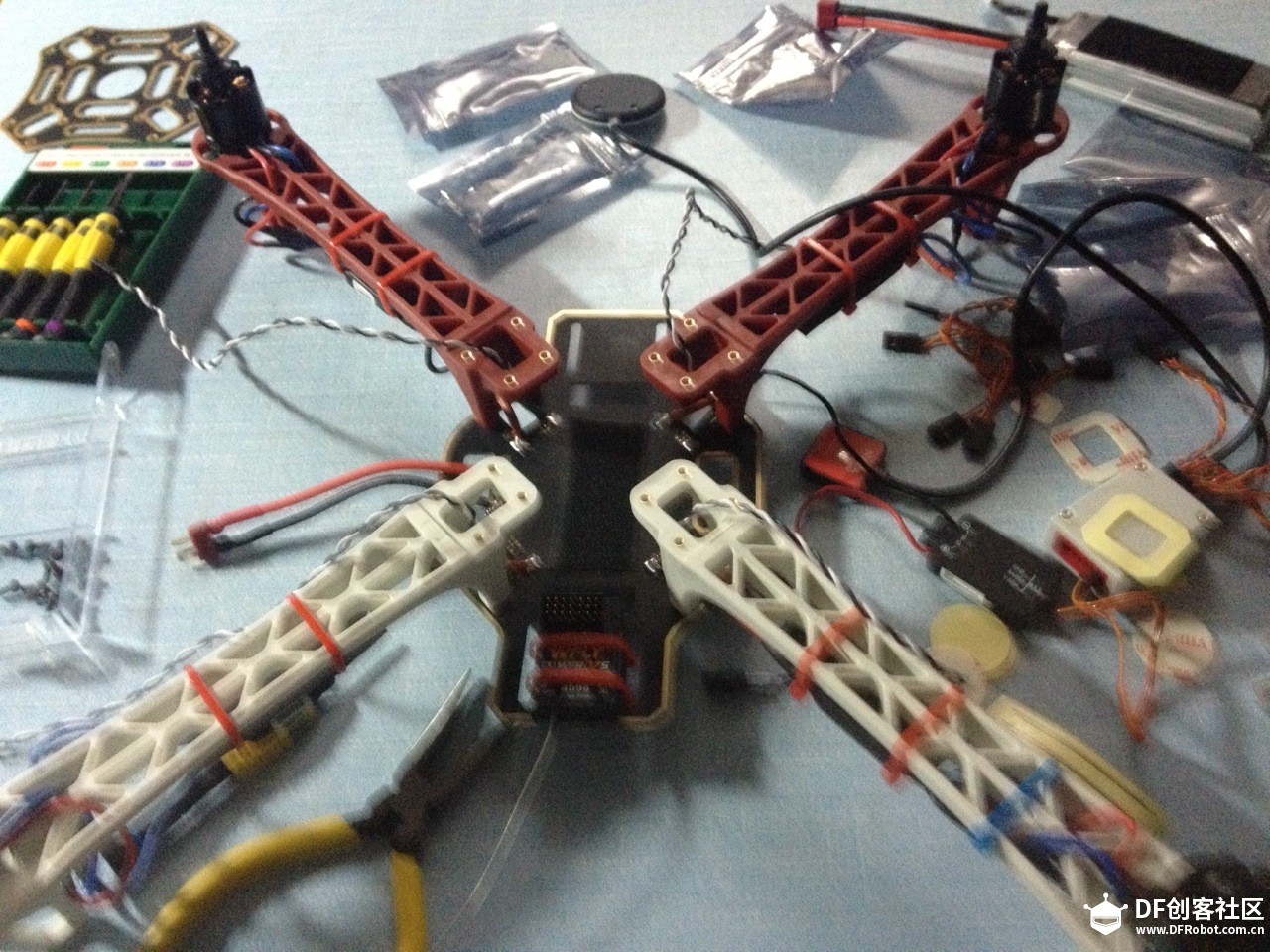 这里的图有点儿不完整,u和x3我就没有标注出来 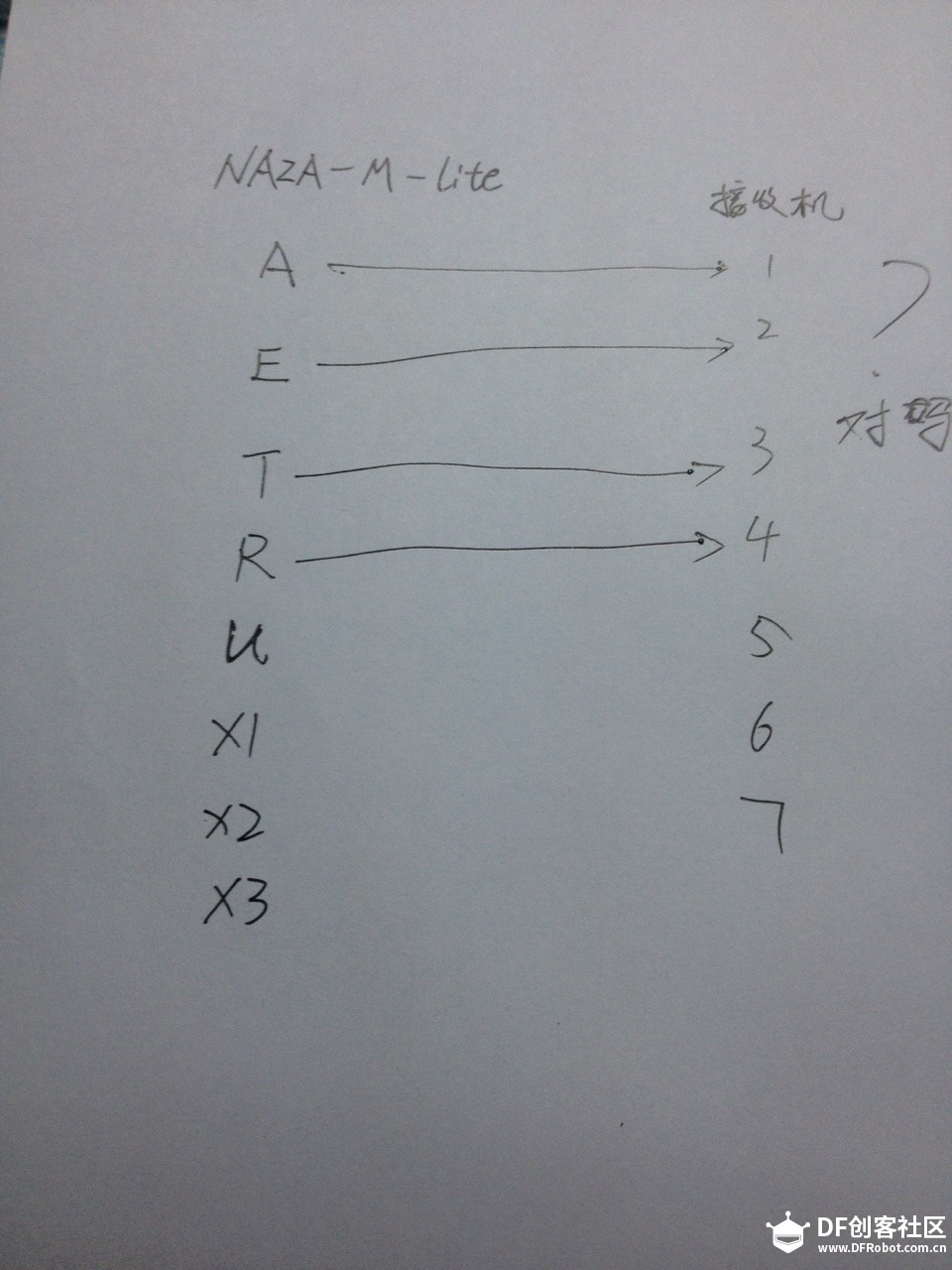 上面图中的线缆接驳还没有全面,后面还有两根线,没有拍照片。。后期补上吧。 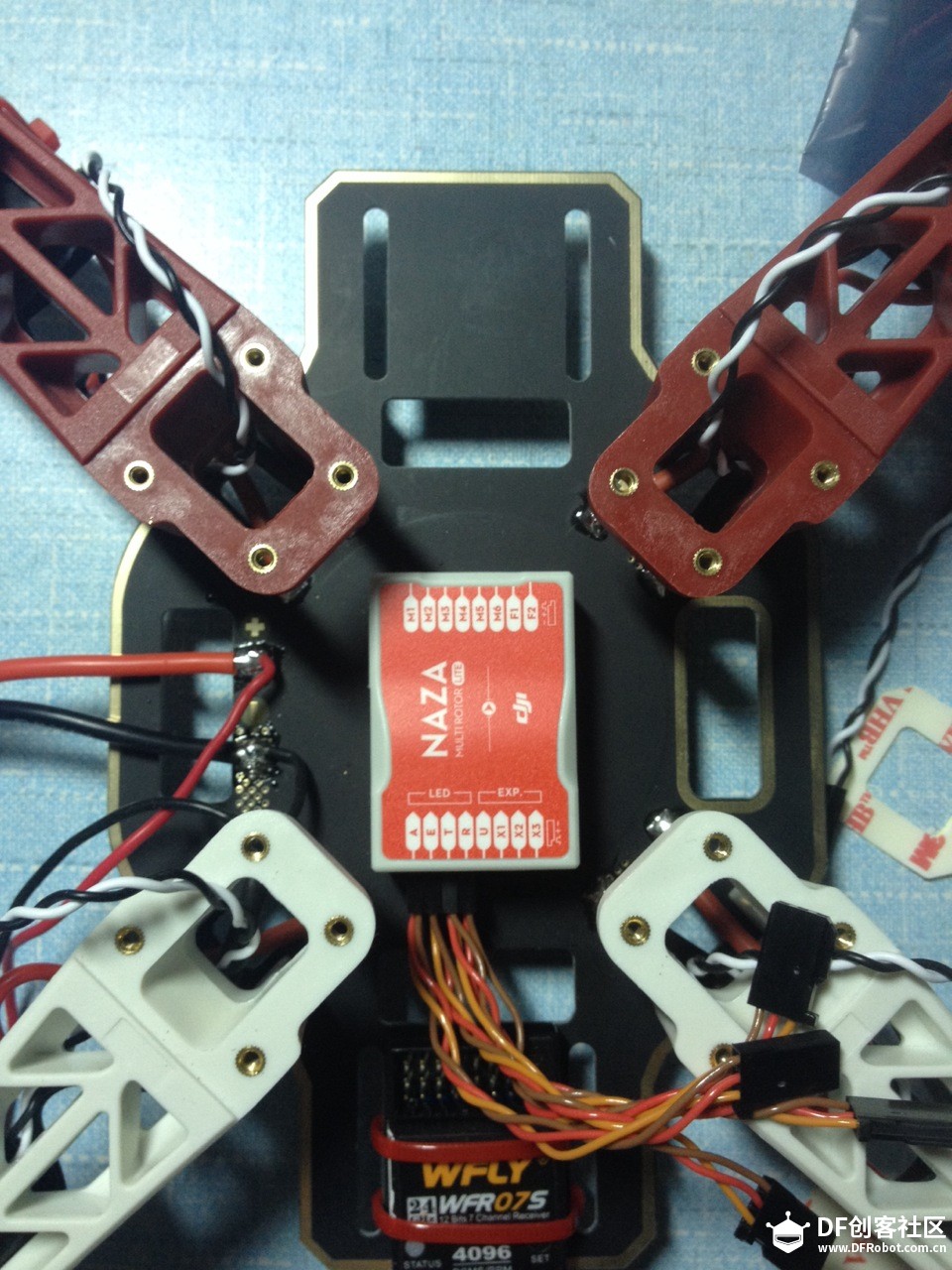 我将这个调试灯接在了接收机的下面  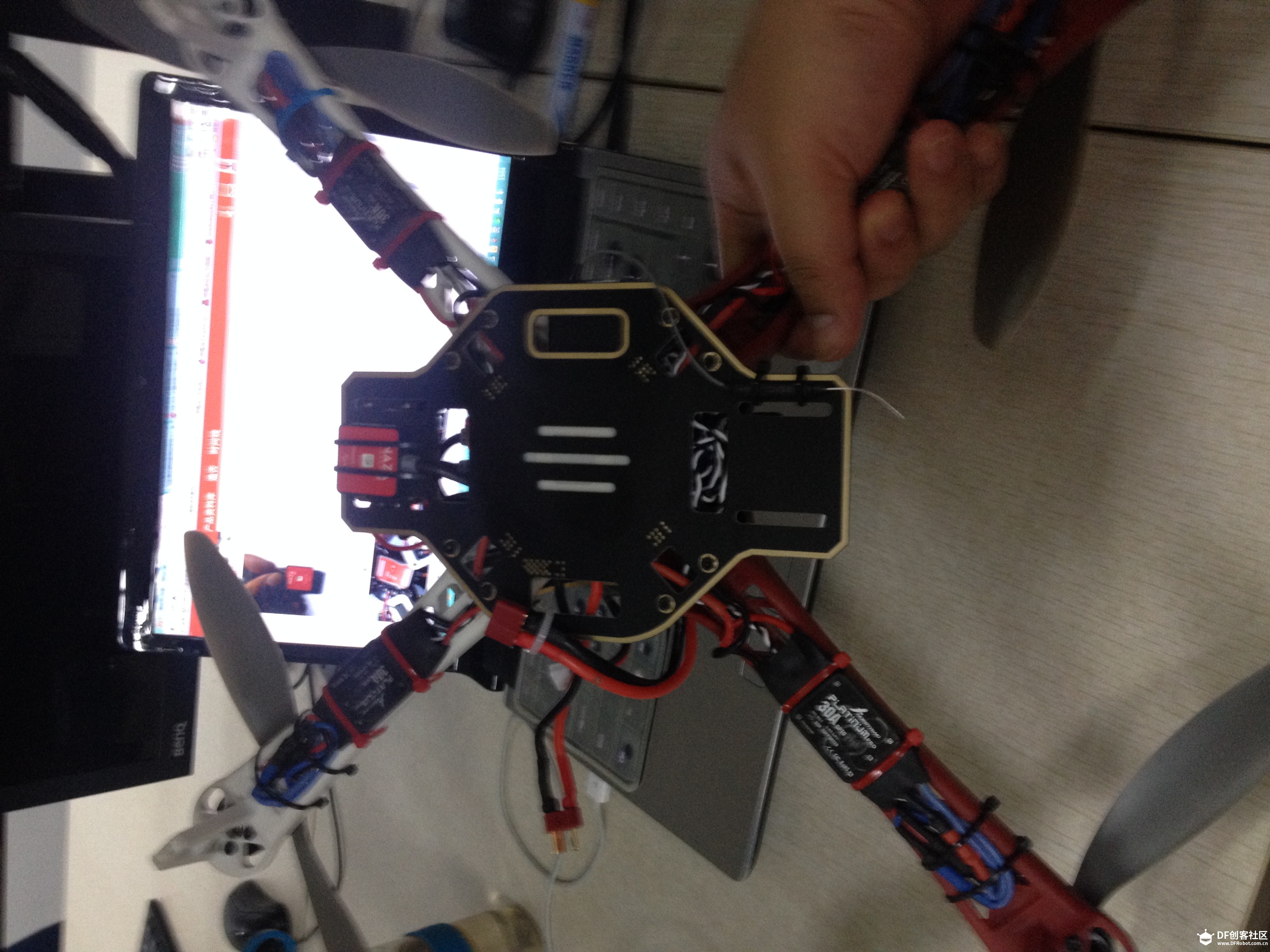 侧面看是这样  然后线缆慢慢理顺,同时将天线用502胶水粘了一下,很快就结实了。哈哈,家里工具不能少啊! 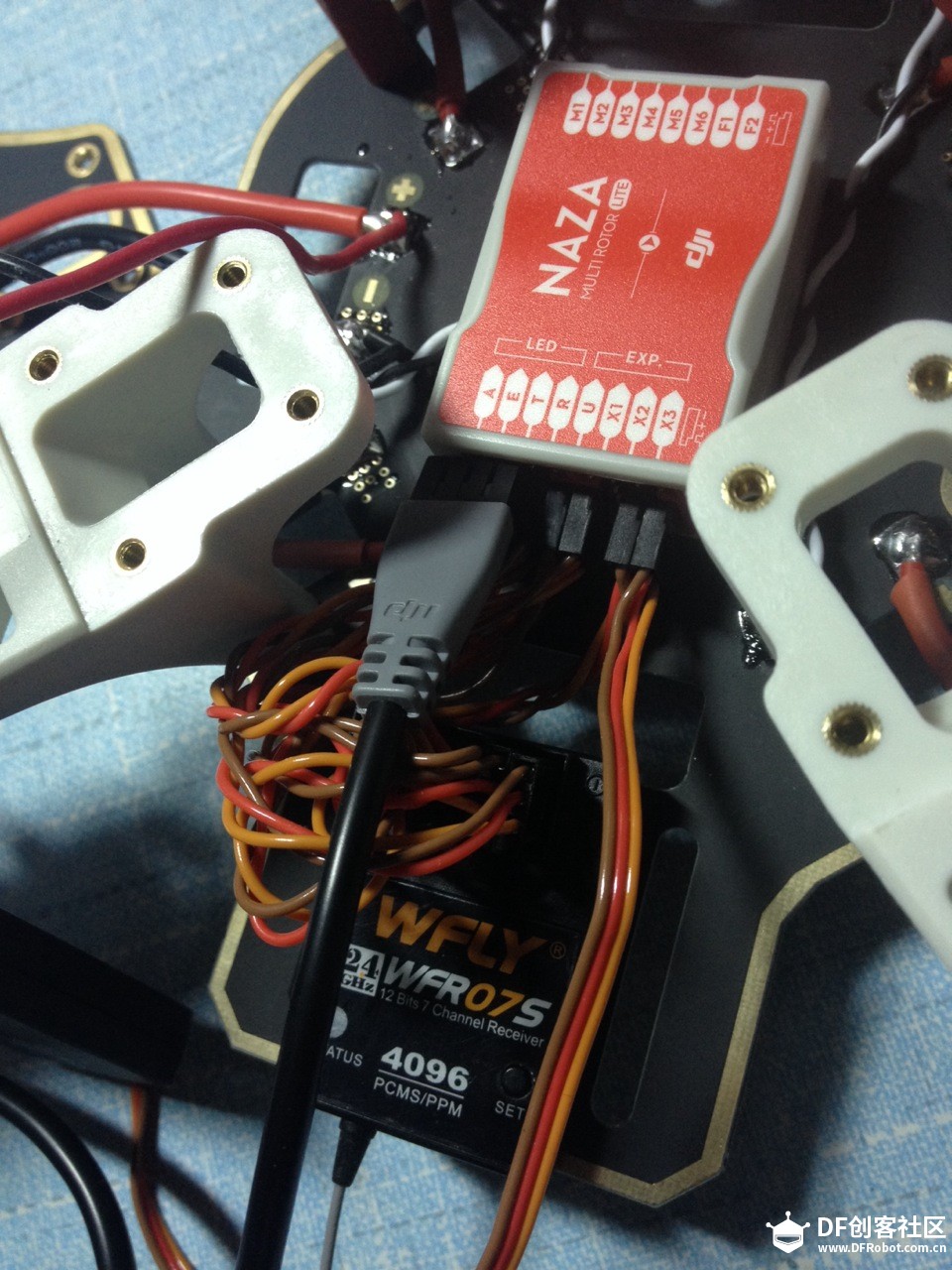 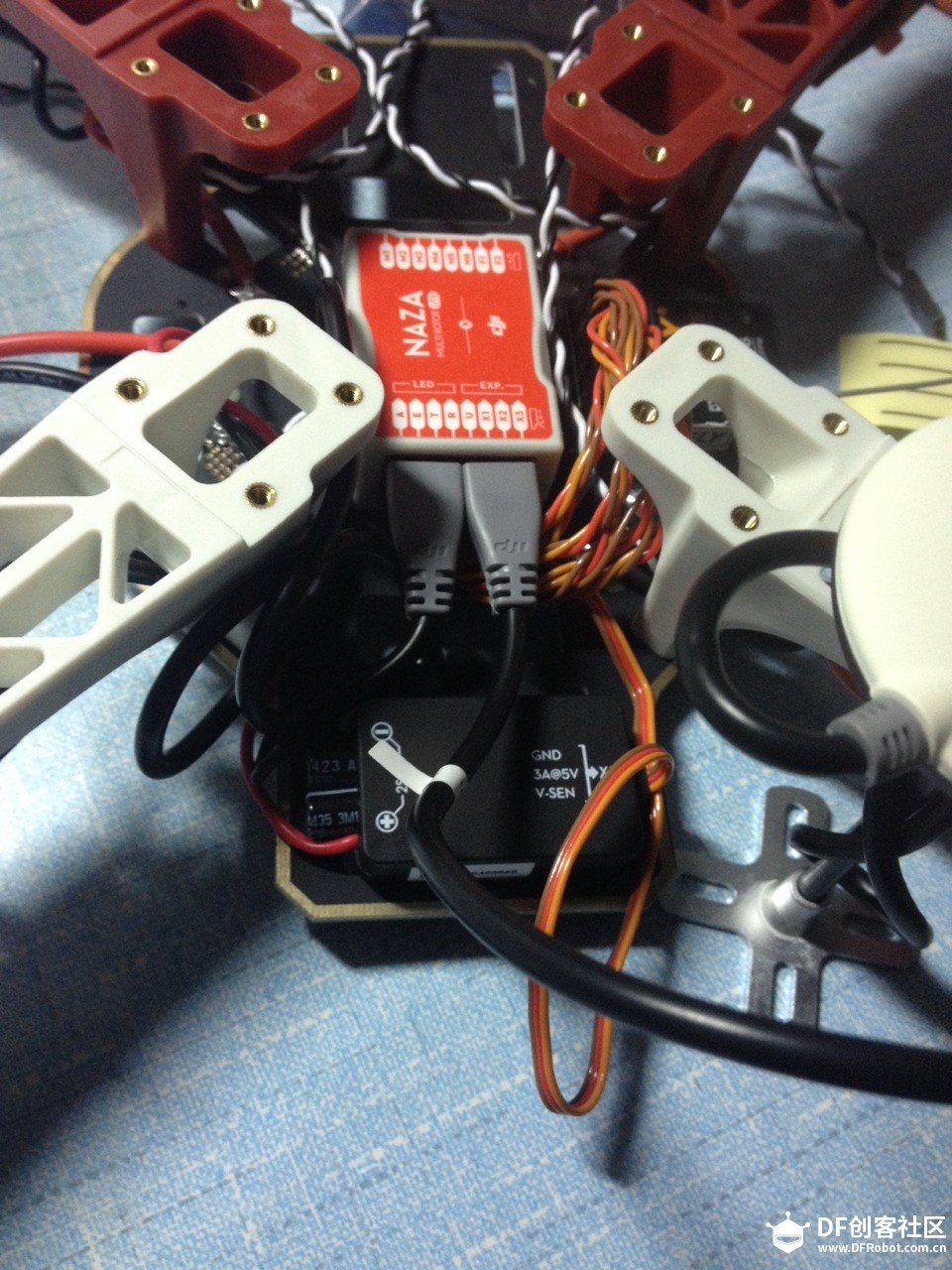 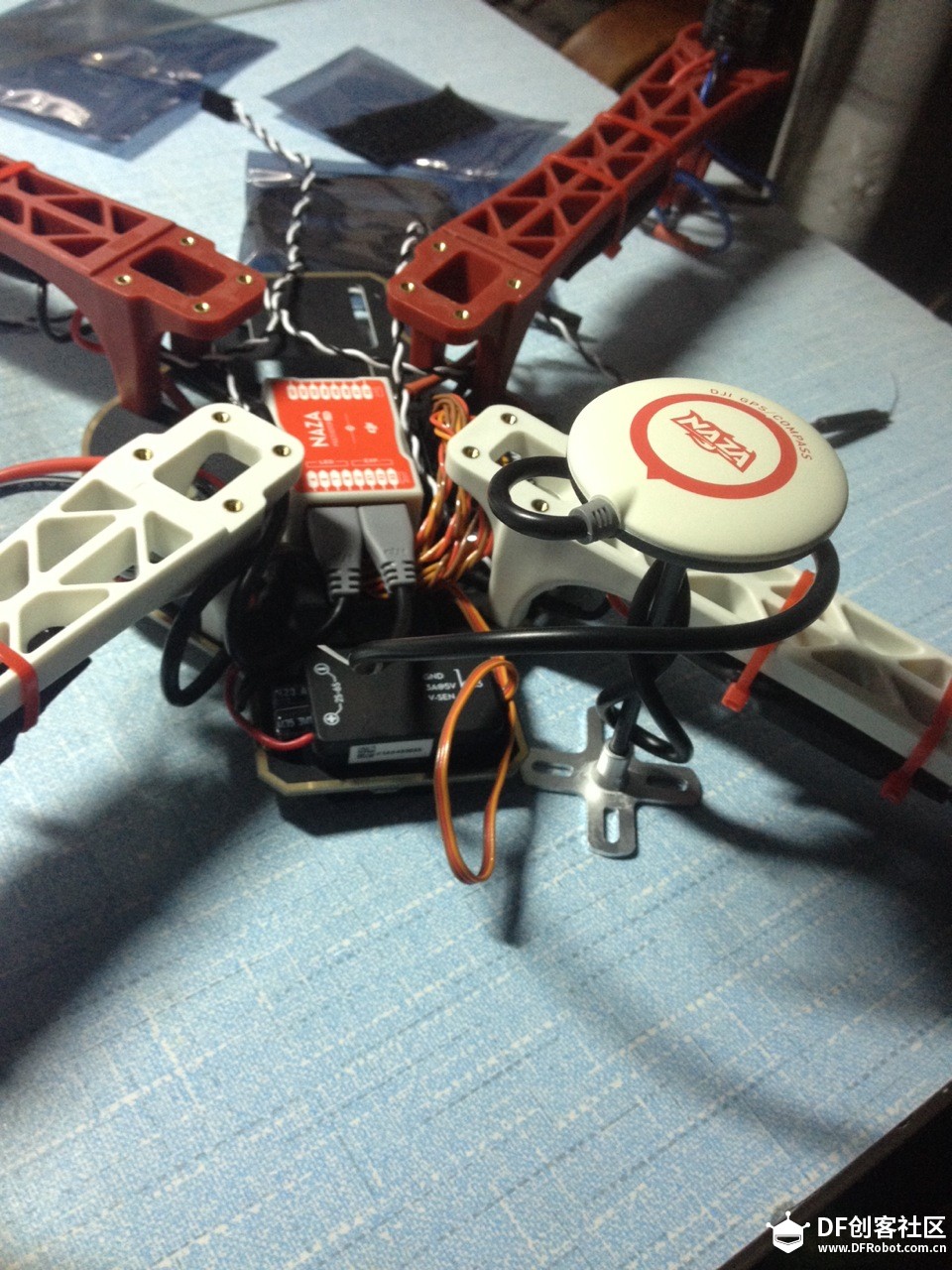 6. 安装无刷电机  为了防止由于电机震动导致螺丝松动,就加了点儿垫片。 然后四个电机分别安装好,要保证电机是垂直于机臂的就可以了,最好拿水平仪测试,我用的是iphone手机的app测试了水平状态。还不错。 7. 安装GPS天线 粘天线的时候没有拍照,所以盗用淘宝上商家的图(应该不会被算是盗版吧?)   旁边的四根黑线我一直不知道干吗用的。。。谁知道告诉我一下哦。 然后接好我是将线缆这样绕在天线支架上的。大家有别的方法告诉我一下哦。绕在上面主要是防止桨打到线缆。这个特别要注意,我的电池正极的线缆就让桨削了一块,太锋利了。大家一定要注意安全哦! 8. 安装接收机 接收机我是绑在底板的右侧,然后用3M胶带粘好,用扎带捆绑了一下。保证悬空的线不会被螺旋桨打到。 工作开始忙了。等回家再接着更新吧,写帖子好麻烦哦。 未完待续。。。。 9. 调整遥控器参数 10. 逐个校准油门行程 11. 电池充电 (学问也蛮深的) 12. 连接电脑刷v2.0固件 13. 通过调参软件进行参数调节 14. 测试无刷旋转方向 15. 无桨上电测试( 这里面要注意的内容更多) 16. 桨做静平衡,有能力的做动平衡(虽然动平衡我从来没有做过) 17. 飞场选择及飞行前检查步骤(我建议大家做个check list) 18. 飞行测试 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 创作达人
创作达人
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 创客造
创客造
 编辑选择奖
编辑选择奖






