|
57403| 25
|
[ESP8266/ESP32] 【ESP32教程】DIY智能机械臂 |

话不多说,先甩两张图给你们瞧瞧。。。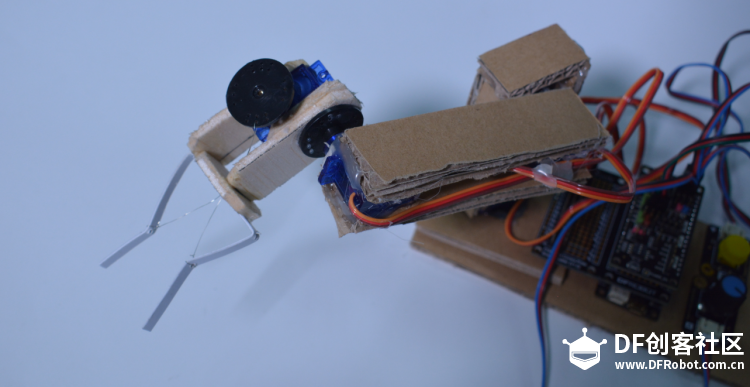 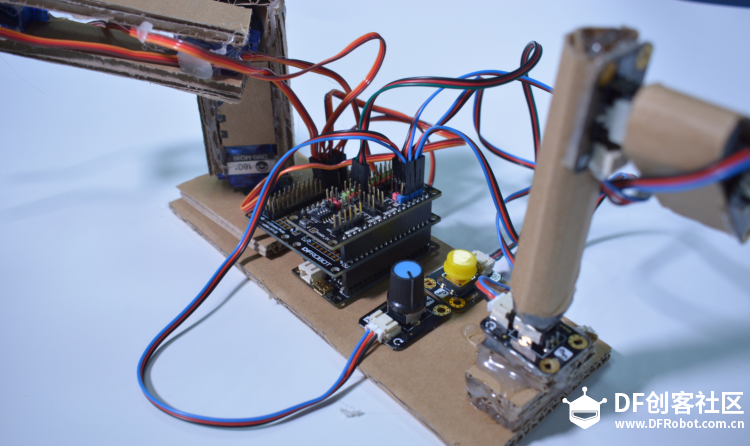 以前读大学的时候买过一个机械臂,说什么10自由度,一个舵机就是30多个大洋,整个机械臂花了我近500块,现在想想TM的也太贵了,而且某宝上还有卖上千元的机械臂,这哪是咱这种人能消受的起的。。。最近看到国外小伙用纸板做东西很火,自己想着为何不用纸板做个机械臂了??? 所需硬件 电位器模块 ×4 按键模块 ×1 9g舵机 ×4 这里我用的电子元件是DFRobot新出的FireBeetle萤火虫系列,方便插接,而主控是用的ESP32,主要是考虑到后续改程序可以通过手机wifi或者蓝牙控制。可能有人会问,为什么要用纸板来做机械臂,答案很简单,因为纸板价格低廉。。。 制作过程 1、 FireBeetle双排原型扩展板排针、排母焊接 DFRobot的萤火虫系列是采用Pin2Pin设计,这里只需要焊接好排针、排母就可以直接插接了。 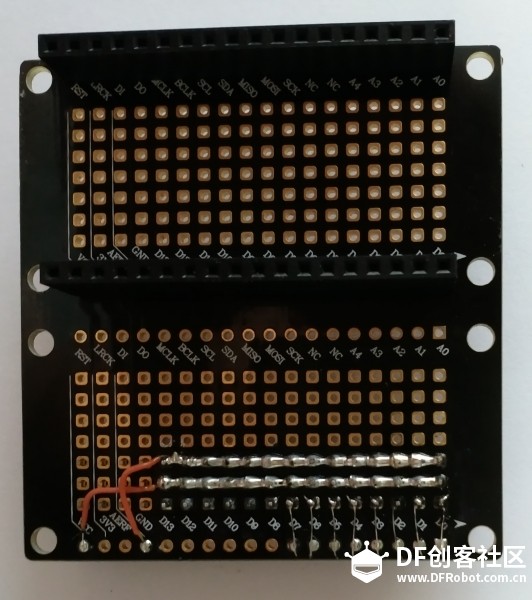 扩展板的背面左边焊接长排母(插接主板的),正面焊接3pin排针,其中2pin连接到VCC,GND,如图所示,其余的pin分别连接到数字口Dx,这是为了兼容Gravity传感器,也是舵机接口。 2、 焊接主板和Gravity传感器扩展板 FireBeetle-ESP32主板焊接排针,Gravity扩展板焊接排母,如下图所示:  3、 插接硬件模块 将主板放在底部,主板上面插接双排原型板,然后在其上面上面查接Graviry扩展板,这样双排原型板可以连接舵机,Gravity扩展板可以插接电位器和按钮模块。 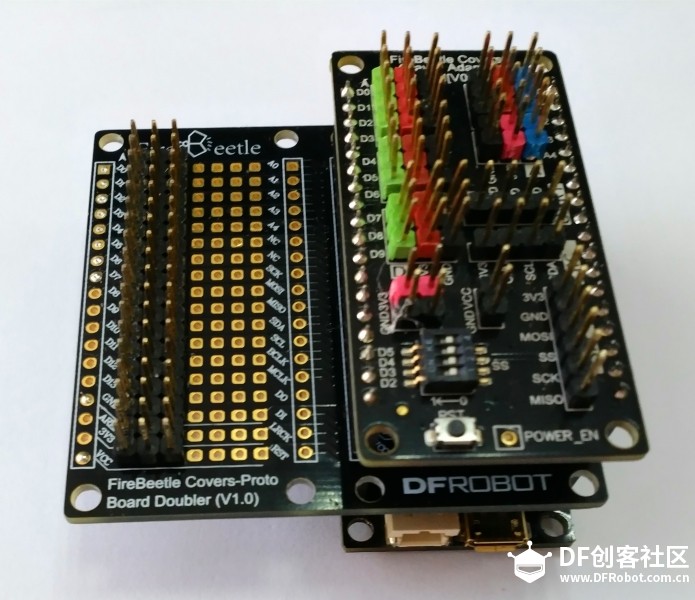 然后下载程序,程序源码,点击下载。 4、 机械臂制作 机械臂的制作过程很简单,就是将各个舵机用纸板拼接起来,大家可以看下我的视频制作过程,需要说明的是,连接部分最好用热熔胶固定,普通的502胶水容易脱落。 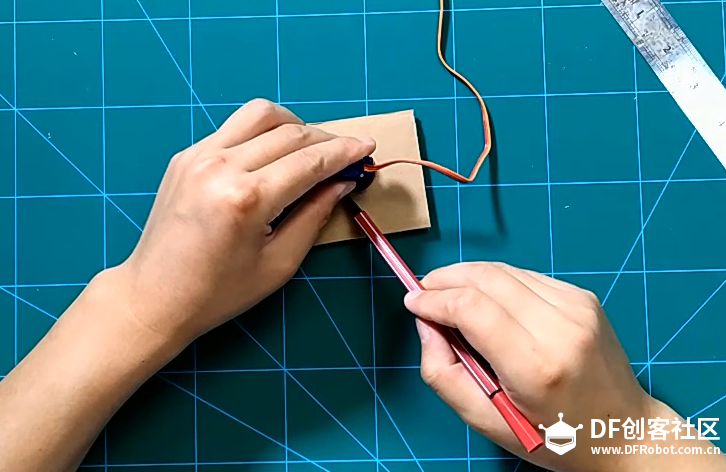   这里要说明一下,舵机、电位器及按键的连接图: 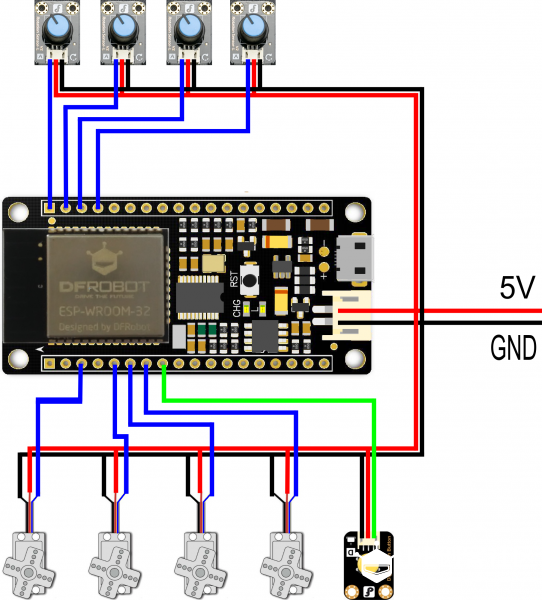 最后,再来一张图秀秀 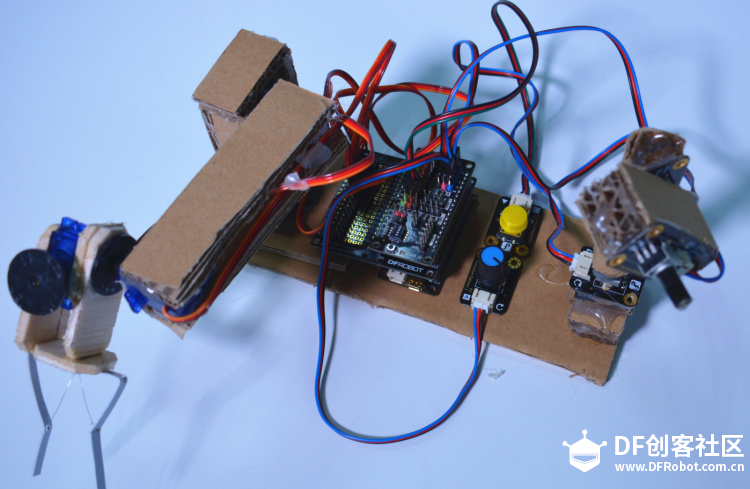 |
野驴先生 发表于 2017-9-7 20:48 软串口没有用过,不过它有多个硬件串口,你可以使用其他的硬件串口呀。 |
|
自己动手做一个吧。成本低。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶







 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






