|
24971| 10
|
[micro:bit基础教程] micro:bit造物粒子(基于Mind+)10— 自平衡仪 |
|
经过前面这么多个项目的学习,你是不是对micro:bit已经了如指掌了呢?来挑战一下吧。 在这一章节的内容学习中,运用micro:bit主控板和传感器,制作出非常炫酷好玩的作品! 麦克的故事 麦克发现,你本来把手机拿在手里时是竖着的,将它转90度,页面就跟随你的重心自动旋转,也就是说页面也转了90度,这是一项极具人性化的设计。这是怎么做到的呢? 这节课的项目我们就是要来模拟这样的功能哦! 所需元件1×micro:bit主控板  1×micro:bit扩展板  1× 舵机(伺服机构) 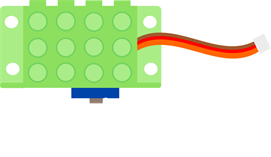 1× MicroUSB 连接线  实现功能 通过编写程序,将程序烧录至板子后,可以让舵机(伺服机构)指针保持指向竖直上方,如果舵机上面支撑某个物体的话,那么物体始终保持竖直向上。 什么是重力加速度? 地球表面附近的物体因受重力产生的加速度叫做重力加速度,也叫自由落体加速度,用g表示。 重力加速度可以做些什么呢? Micro:bit自带加速度计,能实时检测姿态,从而控制舵机指针一直指向正上方。 Micro:bit可以检测X,Y,Z三个方向的重力加速度,其中X沿着左右方向,Y沿着前后方向,Z垂直于板,沿着上下方向。本项目中主要检测X轴上的重力加速度。 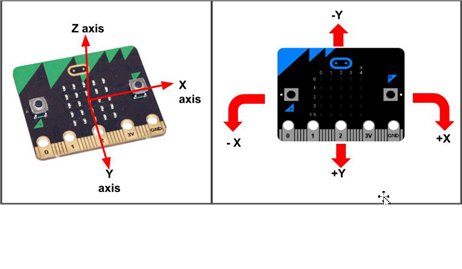 当主板平放在桌面上时,micro:bit只受到竖直方向上的重力(Z轴),所以X,Y都接近于0。 而当板子产生左右倾斜时,X的数值会发生变化。向左侧倾斜则X为负值,反之为正值。 所以我们可以通过获取micro:bit的倾斜角度,控制舵机旋转一个反向的角度,让舵机的指针一直朝上。 硬件连接 将舵机(伺服机构)与micro:bit的P0号接口相连接。 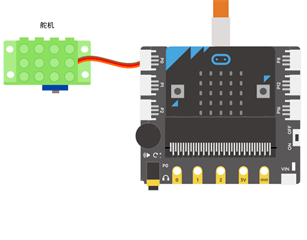 编写程序 STEP1:获取X轴的加速度 X,Y,Z轴的数值可以在功能模块“输入”下找到。  加速度传感器的数值范围在-1023~1023之间变化,你可以通过显示模块来查询变化范围。  左右倾斜观察板子的反应   STEP2:数据处理 当micro:bit板子向左倾斜时,加速度传感器的X方向会产生一个负向的输出值,舵机(伺服机构)需要向右转动来抵消这个角度。 需要用到映射模块,将加速度X轴的值(-1023~1023),映射到舵机(伺服机构)的转动角度(0~180)。映射之后,当micro:bit板子平放在桌面(桌面是水平的)时,舵机(伺服机构)角度为90度。
 STEP2:伺服舵机执行,在“扩展”中找到“执行器”模块,并且选中“舵机模块”: 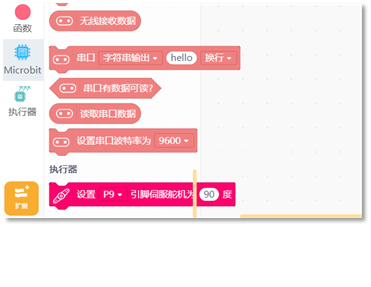 放入“循环执行”中,与“映射模块”嵌套如下: 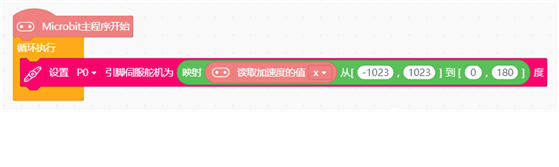 STEP3:结构制作 用双面胶将舵机(伺服机构)和扩展板固定起来,使两者保持相对静止。  实验效果 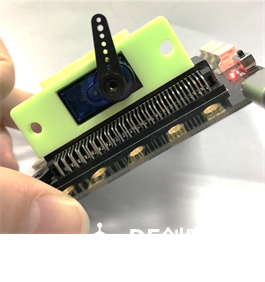 能力提升 尝试使用micro:bit自带的电子罗盘功能制作一个指南针。  更多课程,欢迎点击以下链接 入门课程 进阶课程 |
Vico 发表于 2018-7-23 15:11 你好,我想要一份,这个的程序,想了解一份自由平衡的实现原理,求助 |
Vico 发表于 2018-7-23 15:11 你好,我想要一份,这个的程序,想了解一份自由平衡的实现原理,求助 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶








