|
7945| 5
|
[项目] 【嘉年华展示】掌控机甲狄仁杰麦轮战车 |
本帖最后由 rzegkly 于 2019-10-27 15:46 编辑  秋分(autumnal equinox),农历二十四节气中的第十六个节气, 时间一般为每年的9月22或23日。南方的气候由这一节气起才始入秋。 太阳在这一天到达黄经180度,直射地球赤道,因此这一天24小时昼夜均分,各12小时; 全球无极昼极夜现象。秋分之后,北极附近极夜范围渐大,南极附近极昼范围渐大。 天高云淡,秋高气爽,在这个特别的季节,送上特别的礼物——《掌控机甲狄仁杰麦轮战车 》 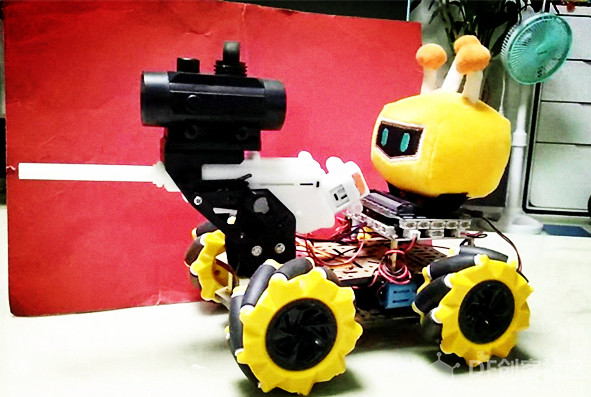  一、思路: 1、设置WiFi的 相关参数,建立SIOT物联网服务器;地址:192.168.1.4 账号:siot ;密码:dfrobot;项目:jj/001; 2、掌控板B端:按P键,发出qianjin指令;按Y键,发出houtui指令; 按T键,发出zuoyi指令;按H键,发出youyi指令; 按O键,发出tingzhi指令;按N键,发出sheji指令; 按A键,发出duoji1指令;按B键,发出duoji2指令; 3、 掌控板A端:当接受qianjin指令,战车前进;当接受houtui指令,战车后退; 当接受zuoy指令,战车左移;当接受youyi指令,战车右移; 当接受停止指令,战车停止;当接受射击指令,战车发射子弹; 当接受duoji1指令,升高电动水弹枪;当接受duoji2指令, 降低电动水弹枪; 二、环境 1、硬件: 掌控板 编程板 2、软件:Mind+ V1..5.6 三、组装麦轮战车 1、电源系统 内置3.7V,800mAh盘古斧扩展板锂电和外接两节8.15v,2000mAh可充锂电配合使用,分别为战车中掌控板和电机、舵机等外部输出设备提供力量来源! 2、麦克纳姆轮系统 轮组由 4 个各含 10个辊子的麦克纳姆轮构成,可助麦轮战车轻松实现全向平移及任意旋转,尽显灵动,实现神奇走位。 3、控制系统 通过掌控板与盘古斧扩展板配合使用,麦轮战车实现前进、后退、左移、右移、射击、调整水弹发射角度等等进行控制。可以实现跟随、自动瞄准、循迹等功能。 4、水弹发射系统: 电动水弹枪、装水子弹仿镜头等组成发射系统,通过金属舵机控制发射器方向,提升使用精准性,发射水晶弹时,后坐电机推力强大,为你呈现震撼打击感, 5、动力系统: 四组蓝色单轴TT马达直流减速电机, 转速200-1023RPMTT,直流电机强磁抗干扰,性能稳定可靠,为麦轮战车提供超强动力! 由于战车体积庞大,建议转速500-1000 RPMTT。 6、组装完毕 卡通小麦昆、麦轮战车、目标射击器组合搭配,形成一道亮丽的风景。 四、建立SIOT物联网服务器 参照相关案例: 【SIOT]基于micro:bit测紫外线科学探究 https://mc.dfrobot.com.cn/thread-296296-1-1.html 【SIOT】基于掌控板测加速值的科学探究 https://mc.dfrobot.com.cn/thread-289931-1-1.html 【物联网】掌控板SIOT测光线值 https://mc.dfrobot.com.cn/thread-288715-1-1.html 【物联网】掌控SIOT远程开关灯 https://mc.dfrobot.com.cn/thread-281136-1-1.html 【小MU】掌控板之乘法连连看 https://mc.dfrobot.com.cn/thread-296782-1-1.html 五、编写程序 步骤1、 掌控板B端参数设置 1、通过数据线连接B端掌步骤控板和计算机,用管理员模式打开Mind+1.5.6,将Mind+切换为“上传模式”下,连接设备,选择串口com9; 说明: 由于家里路由器使用动态分配IP,所有每次开电脑的IP都在变。 设置SIOT服务器地址时,查看本地连接网络属性,再设置服务器地址:192.168.1.2。 掌控板B端: 按P键,发出qianjin指令; 按Y键,发出houtui指令; 按T键,发出zuoyi指令; 按H键,发出youyi指令; 按o键,发出tingzhi指令; 按N键,发出sheji指令; 按A键,发出duoji1指令; 按B键,发出duoji2指令; 步骤3掌控板A端参数设置1、通过数据线连接A端掌控板和计算机,用管理员模式打开Mind+1.5.6,将Mind+切换为“实时模式”下,连接设备,选择串口com17; 2、扩展模块中,添加主控板:掌控板 ;执行模块:舵机,网络服务模块:MOTT 和WiFi 3、 掌控板A端: 当接受qianjin指令,战车前进; 当接受houtui指令,战车后退; 当接受zuoy指令,战车左移; 当接受youyi指令,战车右移; 当接受停止指令,战车停止; 当接受射击指令,战车发射子弹; 当接受duoji1指令,升高电动水弹枪; 当接受duoji2指令,降低电动水弹枪; 六、 知识拓展1、麦克纳姆轮 1973年,瑞典麦克纳姆公司发明。这种全方位移动方式是基于一个有许多位于机轮周边的轮轴的中心轮的原理上,这些成角度的周边轮轴把一部分的机轮转向力转化到一个机轮法向力上面。 麦克纳姆轮与普通轮子的区别在于麦克纳姆轮旋转时,由于存在斜向的从动轮,会同时产生一个斜向的力,当我们控制轮子旋转的速度与方向时,将斜向的力增强或抵消,从而实现小车的全向移动。可以完成横移、斜方向移动等普通小车无法完成的高难度动作,轮子的转动方向与小车的运动方向关系如下图: |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶


 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 版主限定
版主限定
 牛X认证
牛X认证
 老版主限定
老版主限定
 创作达人
创作达人
 小蘑菇
小蘑菇
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 创客造
创客造
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






