|
4182| 0
|
[官方资料] NVIDIA Jetson Nano 2GB 系列文章(8):执行常见机器视觉应用 |

|
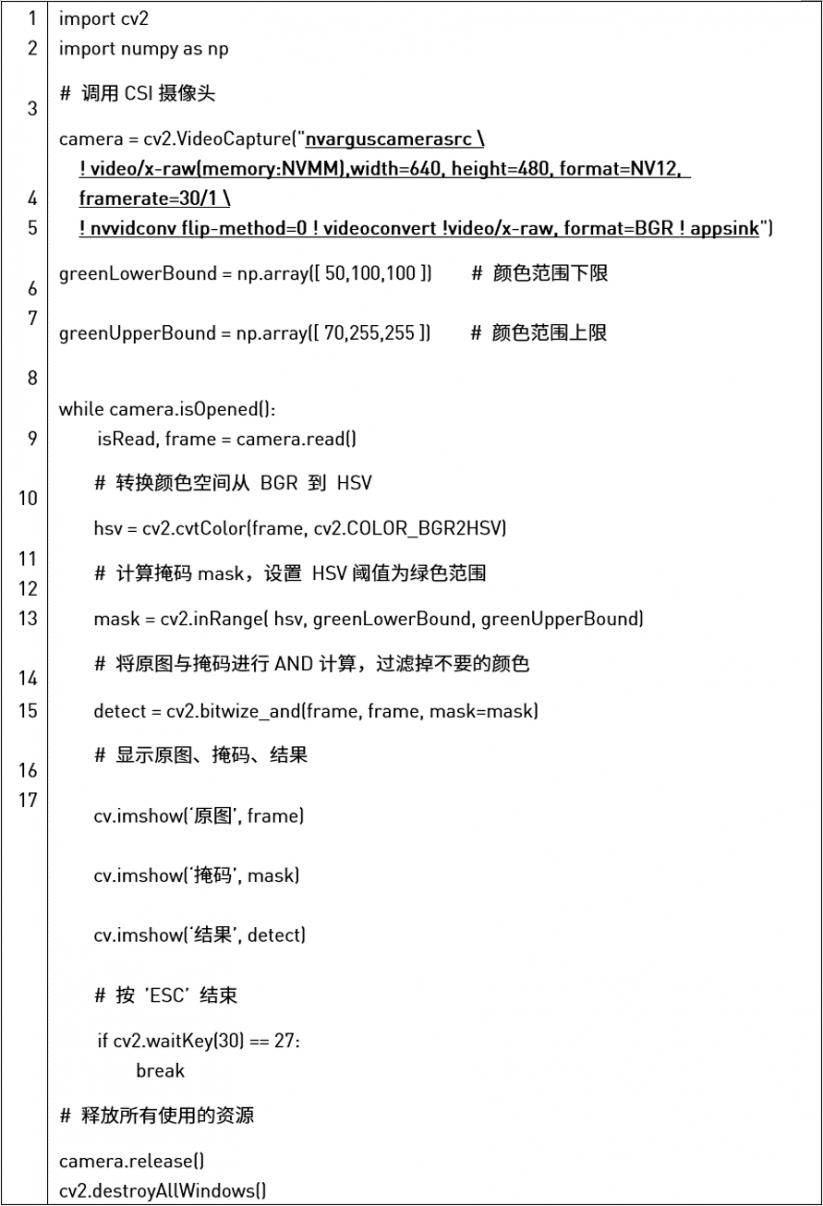
本帖最后由 jetson小助理 于 2021-7-6 10:26 编辑 在本系列上一篇文章中,我们为大家展示了如何通过 OpenCV 调用 CSI/USB 摄像头,在本篇文章中,我们将向大家介绍如何执行常见机器视觉应用。 在上一篇文章中,已经简单说明了图像处理与计算机视觉的差异,并且在 Jetson Nano 2GB 上,结合 CSI 摄像头与 JetPack 所提供的 OpenCV 4.1.1 版本,实现了三种最基础的应用。每个 Python 代码都只需要 10+ 行就可以,让大家轻松感受到 Jetson Nano 2GB 的开发便利性。 本篇内容主要是在 Jetson Nano 2GB 上运用 OpenCV,执行三个有特色的计算机视觉应用,这部分会很频繁的运用到色彩空间(color space)转换技巧,在 OpenCV 上只需要一道“cv2.cvtColor()”指令就可以实现,非常简单。 接下来就开始本文的实验内容。 追踪特定颜色物件本范例追踪“绿色”物体,执行步骤如下:
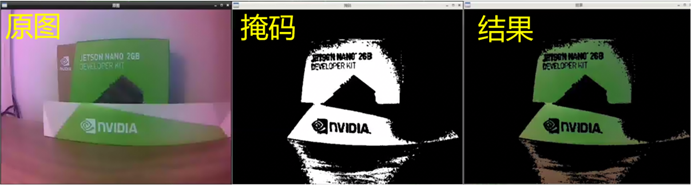
执行结果如下:
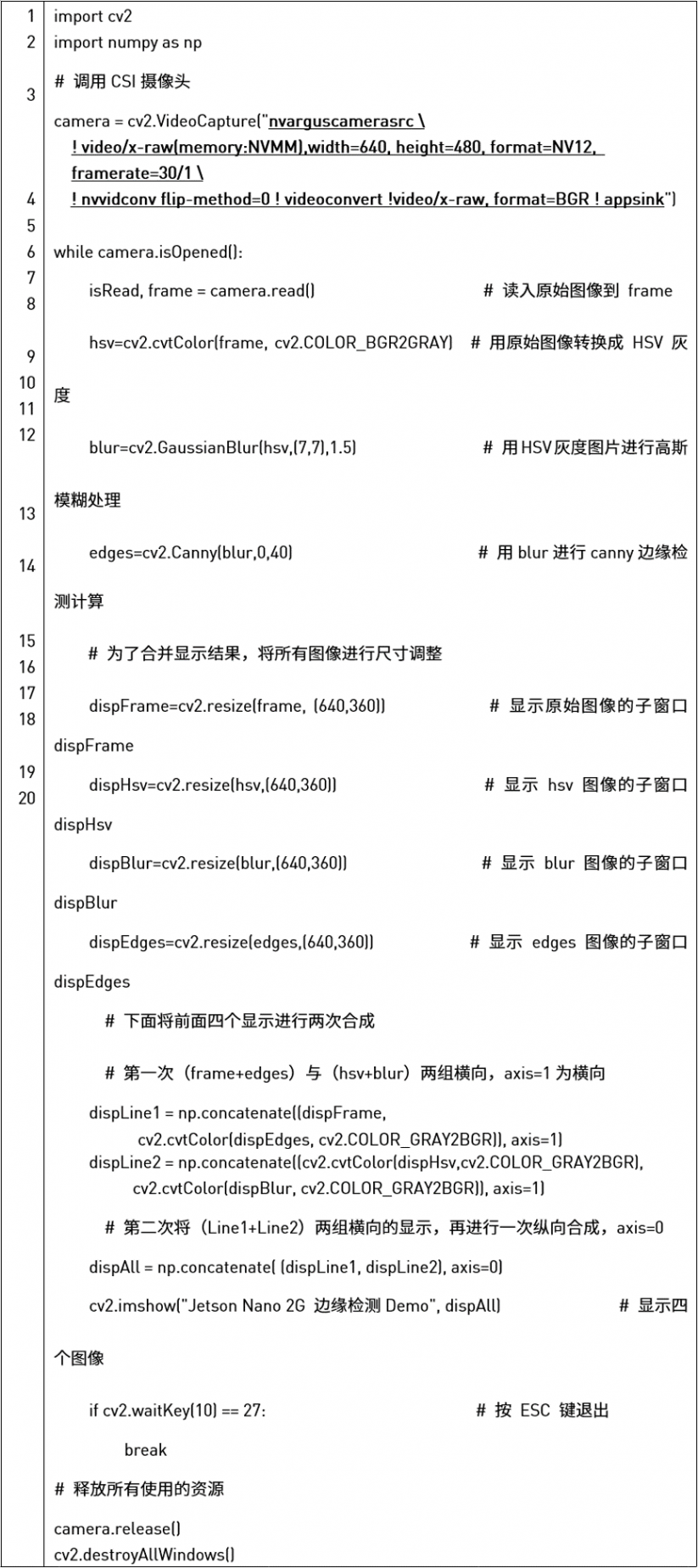
边缘检测(Edge Detection)执行步骤如下:
执行结果如下:
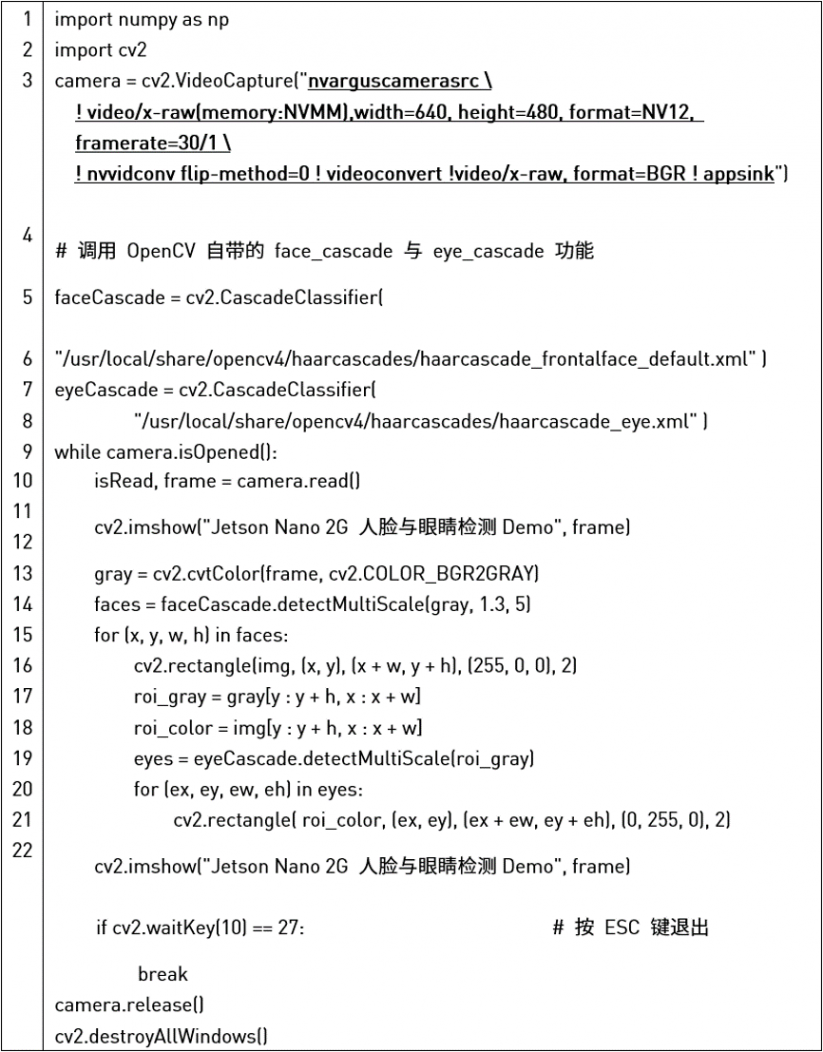
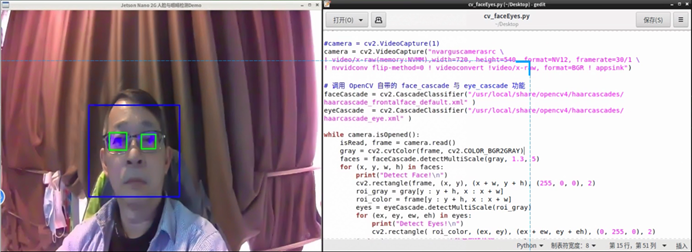
人脸追踪+眼睛追踪这个代码调用 OpenCV 自带的 HaarCascade 算法分类器,调用方式也很简单,需要指定脸部分类器(classifier)的位置,在 /usr/local/share/opencv4/haarcascades 下面,里面提供将近 20 种分类器,可以按照需求变更。 这个范例也将“眼睛”识别分类器放进去,并且嵌套在脸部识别的循环里面,因为眼睛一定在脸里面,这样可以做的更丰富些。 详细代码如下:
执行结果如下:蓝色框代表找到的“脸”,绿色框表示“眼睛”。
|



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






