|
4588| 0
|
[官方资料] NVIDIA Jetson Nano 2GB 系列文章(31):DeepStream 多模型组合检测-1 |

|
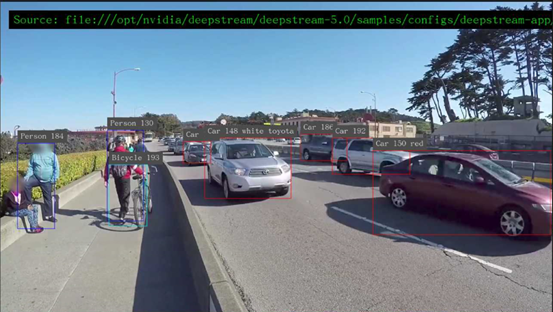
前面已经介绍过关于 DeepStream 各种输入源的使用方式,而且 Jetson Nano 2GB 上开启 4 路输入(两个摄像头+两个视频文件),都能得到 25FPS 以上的实时性能,但毕竟“单一检测器(detector)”检测出来的物件是离散型的内容,例如车、人、脚踏车这些各自独立的信息。有没有什么方法能够实现“组合信息”呢?例如“黑色/大众/SUV 车”! DeepStream 有一个非常强大的功能,就是多模型组合检测的功能,以一个主(Primary)推理引擎(GIE:GPU Inference Engine)去带着多个次(Secondary)推理引擎,就能实现前面所说的功能。 本实验在 Jetson Nano 2GB 上,执行 4 种模型的组合检测功能,能将检测到的车辆再往下区分颜色、厂牌、车种等进一步信息,在 4 路输入视频状态下能得到 20+FPS 性能,并且我们将显示的信息做中文化处理(如下图)。
简单说明一下每个目录所代表的的意义:
组成结构也十分简单,其中主(Primary)检测器只有一个,而且必须有一个,否则 DeepStream 无法进行推理识别。次(Secondary)检测器可以有好几个,这里的范例就是针对“Car”这个类别,再添加“Color”、“Maker”、“Type”这三类元素,就能获取视频图像中物件的更完整信息。 在 Jetson Nano 的/opt/nvidia/deepstream/deepstream/samples/config/deepstream-app 下面的 source4_1080p_dec_infer-resnet_tracker_sgie_tiled_display_int8.txt,就已经把这个组合检测器的配置调试好,现在直接执行以下指令:
现在看到启动四个视频窗,但是每个视窗的执行性能只有 8FPS,总性能大约 32FPS,并不是太理想。 接下来看看怎么优化这个配置文件
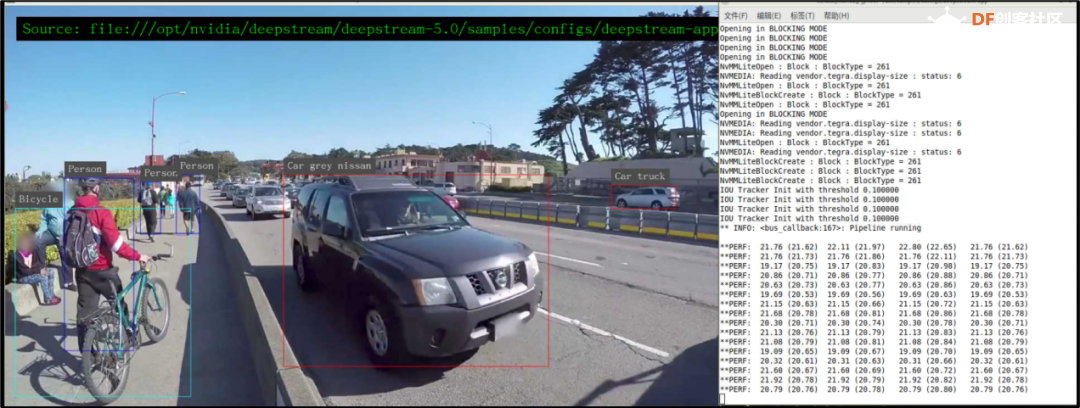
(1) model-engine-file路径的“Primary_Detector”部分改成“Primary_Detector_Nano” 3.将追踪器从原本的 ibnvds_mot_klt.so 改成 libnvds_mot_iou.so,用“#”变更注释的位置就可以。 修改完后重新执行,可以看到每个窗口的检测性能提升到 10~12FPS,总性能提升到 40~48FPS,比原本提升12~50%,不过距离理想中的 25FPS 还有很大的差距。 执行过程中如果遇到“Theremay be a timestamping problem, or this computer is too slow.”这样的信息,就把[sink0]下面的“sync=”设定值改为“0”就可以。 现在看看是否还有什么可调整的空间?参考前一篇文章“DeepStream-04:Jetson Nano 摄像头实时性能”所提到的,将[primary-gie]下面的“interval=”设定为“1”,然后再执行应用时,发现每个输入源的识别性能立即提升到 20FPS 左右(如下图),总性能已经能到 80FPS 左右,比最初的 32FPS 提升大约 2.5倍,这已经很接近实时识别的性能。 好了,在Jetson Nano 2GB 上已经能达到接近实时推理的性能,是相当好的状态。 如果对于显示输出的状态有些不满意的话,我们按照下面的步骤去执行,将“英文”类别名改成“中文”,并且将边框变粗、字体放大,就能更轻松看到推理的效果: 1.所有的显示名称,都在 models 目录下个别模型目录里的labels.txt,可以将里面的内容全部改成中文。 例如
2.边框宽度:修改[osd]下面的“board-width”值,推荐 2~4 比较合适; 现在重新执行这个 deepstream-app 的应用,就能得到本文一开始所显示的效果: 如何?这样的效果与性能就是在 Jetson Nano 2GB 实现的! |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






