|
15084| 15
|
坐姿智能提醒器 |

【设计意图】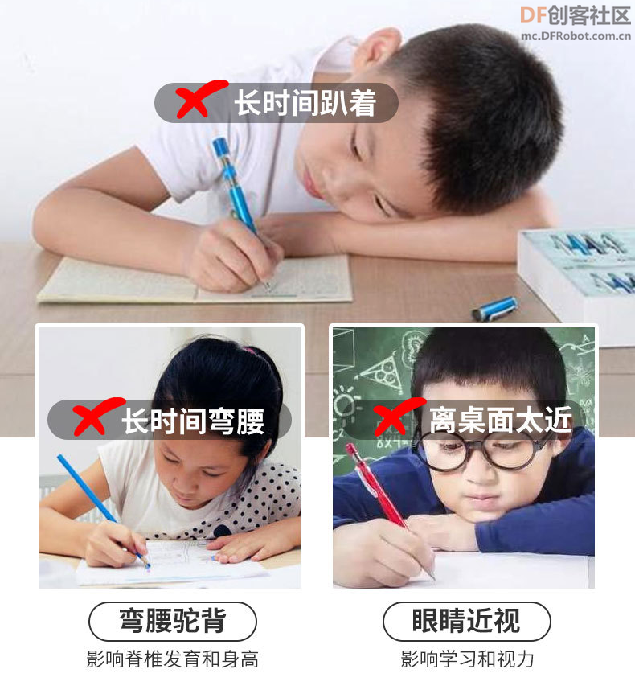 坐姿不正确,是儿童和青少年在学习和工作中经常出现一种情况,坐姿不正确,可以引起一系列的后果,通常会引起以下后果: 1、脊柱侧弯:儿童、青少年处于生理发育期,脊柱的关节、韧带没有完全成形或者处于比较薄弱的时期,由于长期的坐姿不良,会导致发育的异常,从而出现脊柱的侧弯; 2、颈椎病:由于坐姿不良,尤其是长时间的低头、伏案工作、看手机、看电脑,容易出现颈椎的退行改变,颈椎的生理曲度会变直或者消失,严重的会反弓。从而引起颈椎周围的韧带和关节退行改变,严重椎间盘突出或者颈椎不稳,压迫了周围的血管或神经,出现一系列症状; 3、腰背部肌肉劳损:由于慢性疲劳、坐姿不良等,造成肌肉的长期高强度、高张力状态,引起局部的缺血、损伤,出现严重的改变,就是腰肌劳损; 4、视力异常:没有放在一个正常的位置看东西,可能出现近视或者出现屈光不正等异常情况。 【作品功能】   1、通过摄像头采集坐姿,通过人工智能算法进行实时判断人体姿态 2、对不正确坐姿进行语音、灯光提醒,如低头趴桌、左右歪头、长时间不活动。 【制作元器件与材料】 1.LattePanda 拿铁熊猫 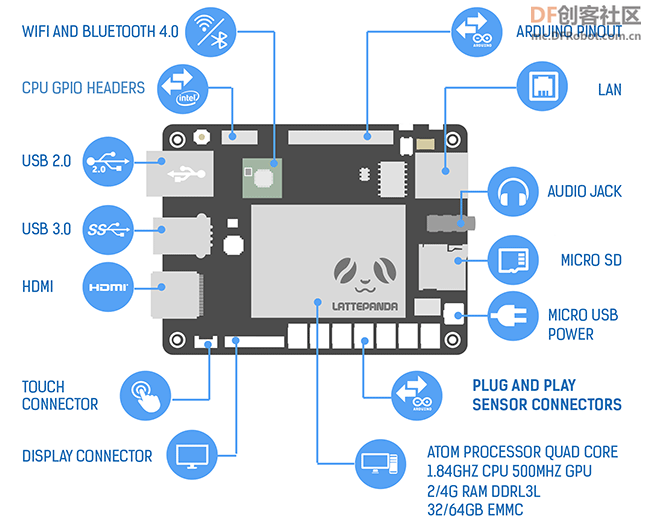 LattePanda是市面上首款Win 10开发板,运行完整版Windows 10操作系统。板载一颗英特尔4核处理器,最高1.92GHz运行频率,内置蓝牙和WiFi模组,支持USB 3.0接口、HDMI视频输出、3.5mm音频接口,100Mbps以太网口,以及额外的MicroSD扩展卡槽。您完全可以把它作为一台mini小电脑来看待,并且开发板集成一块Arduino Leonardo单片机,可以外拓各种传感器模块。 2.LattePanda 拿铁熊猫 IPS显示屏  LattePanda 7寸屏幕,IPS屏幕技术和1024 * 600高分辨率带来完美的视觉体验,精致小巧的显示屏与您的“小熊猫”完美配套!无需单独供电,连上LattePanda即可使用。搭配触摸屏,为您的项目提供可视化的用户界面。 3.高低音调节数字蓝牙功放板 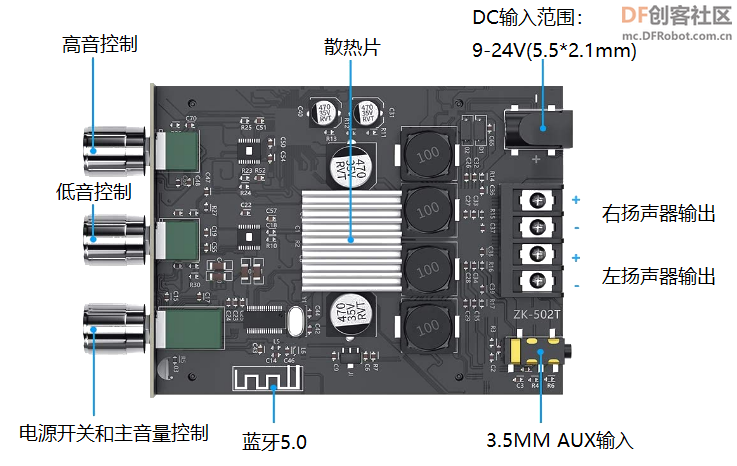 这是一款可独立控制高音和低音的数字蓝牙功放板,它具有AM干扰抑制和滤波功能,确保即使长时间大功率操作,音质更加清澈圆润。工作电压范围DC9-24V,AUX+蓝牙5.0输入,输出功率50W,带有3个调节旋钮可进行电源开关和主音量控制、高音和低音独立控制,适用于4-8Ω、15W-100W无源扬声器。可连接拿铁熊猫、树莓派、手机以及其它带有蓝牙的主控板使用,可以DIY出自己喜欢的音箱。 【电路图】 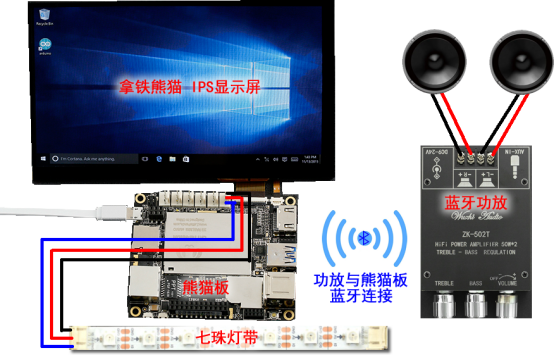 【实物图】  【制作元器件与材料】 1.旧物利用——喇叭  从旧Mp3播放器上拆下两个喇叭 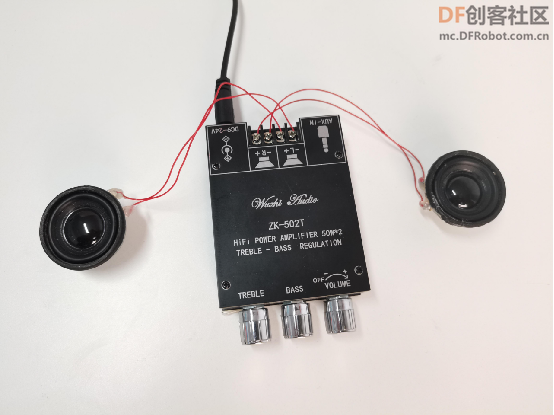 将两个喇叭与蓝牙功放连接 2.安装摄像头  摄像头安装在装置顶端,使用热熔胶固定,数据线通过盒子上的孔穿回盒内。 3.安装喇叭与灯带  喇叭与灯带安装在装置底端 4.安装蓝牙功放  将盒子侧面开孔,将蓝牙功能的三个旋钮引出。 5.安装熊猫板与显示屏   熊猫板固定在屏幕的背面 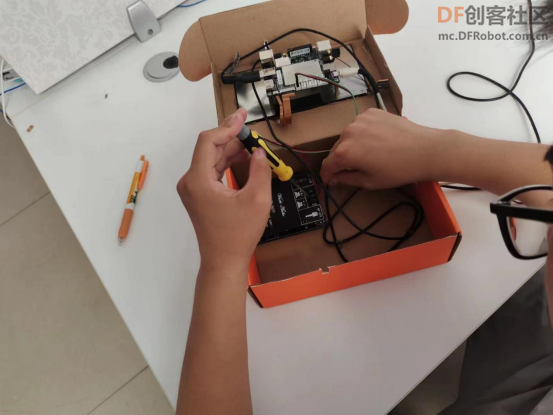 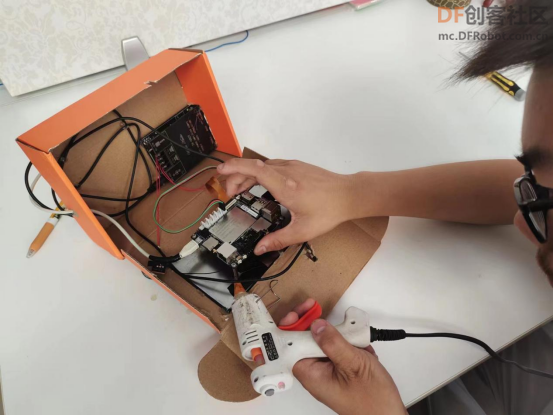 【技术实现过程】 1.Mediapipe  Mediapipe是google的一个开源项目,支持跨平台的常用ML方案。 我们使用到其中人体姿态估计:可以给出33个关键点的3D坐标 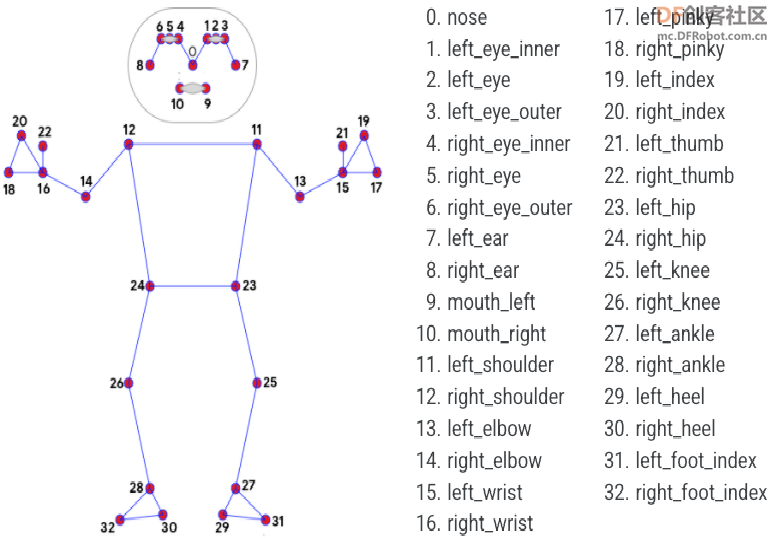 33个关键点的3D坐标 2.配置环境 程序运行在python 3.8.0环境下: (1)安装opencv-python 计算机视觉库。 pip install opencv-python (2)安装Numpy 开源的数值计算扩展,功能是科学计算,数据分析与处理。 pip install Numpy (3)安装Scipy 距离计算库。 pip install Scipy (4)安装pinpong 是一套控制开源硬件主控板的 Pyhton 库。 pip install pinpong (5)安装Mediapipe 人工智能姿态识别开源库 pip install mediapipe (6)安装cvzone 一个计算机视觉工具包,可方便的图像处理和实现视觉AI功能。核心是使用OpenCV和Mediapipe库。 pip install cvzone 3.HAR判断低头开源算法(head aspect ratio) 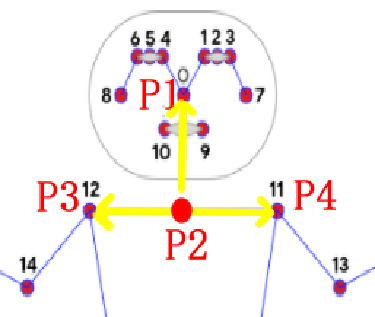 因人像在摄像头中会出现近大远不的现象,所以只使用两点间距离阈值来判断姿态是不准确的。 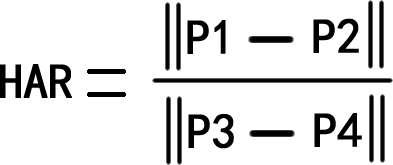 HAR判断低头开源算法: 在头部选择鼻子、两肩、两肩中点,四个点,具体如右图。 根据这四个点我们便可以表示低头和抬头的状态。当抬头的时候,上图中竖着的黄色箭头会变得比较高,而低头(不正确姿势)这个箭头就会变矮。但是由于近大远小的原因,单纯用高度来表示状态缺少参考比较,因此提出如下公式表示状态: 4.利用Mediapipe 获取人体姿态坐标点 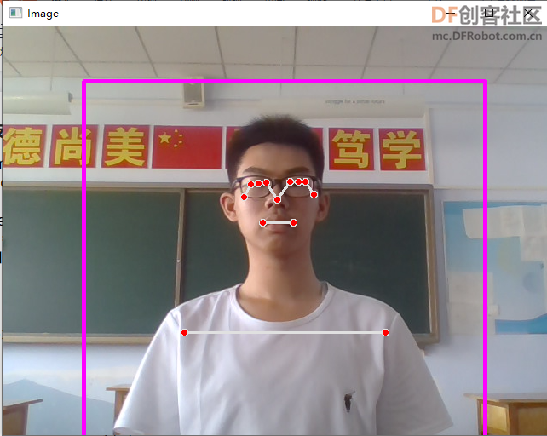 5.修改开源库cvzone中PoseDetector中findDistance函数 6.计算判断低头的HAR 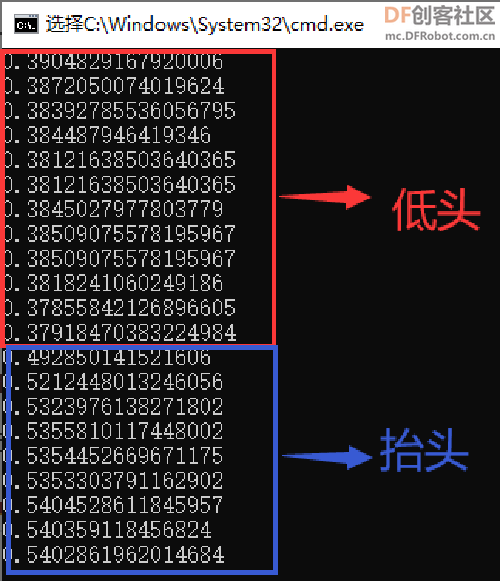 #计算判断低头的HAR disp0pmid=detector.findDistance(11,12,img,dismid=True,p0=0)#计算鼻子与两肩中点的距离 disp11p12=detector.findDistance(11,12,img)#计算两肩的距离 Har=disp0pmid/disp11p12#计算Har print(Har) if Har<0.45:#Har小于0.45认定过于低头 engine.say("请不要过于低头") engine.runAndWait() 7.确定Har阈值 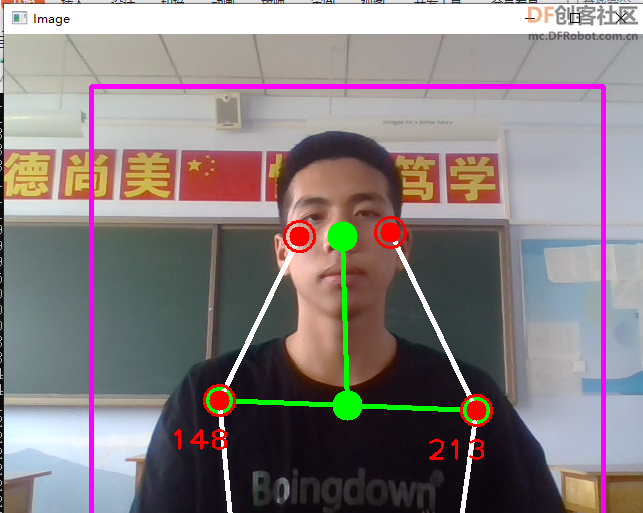 使用print(Har)语句,经过不断测试,查看低头与抬头中间的阈值,最终确定阈值为0.45,当Har小于0.45认定过于低头。 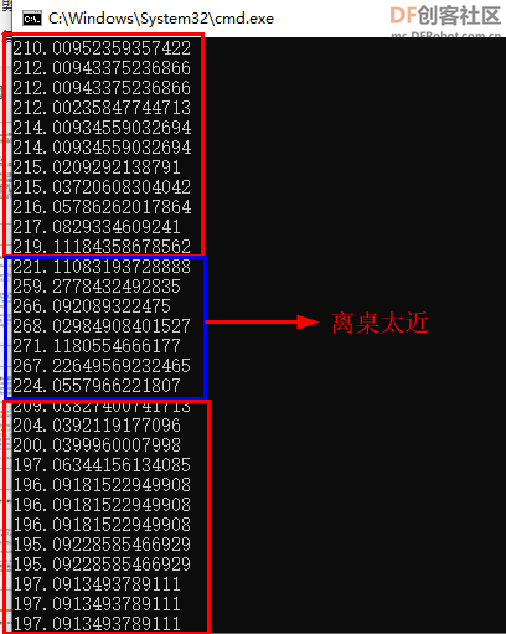 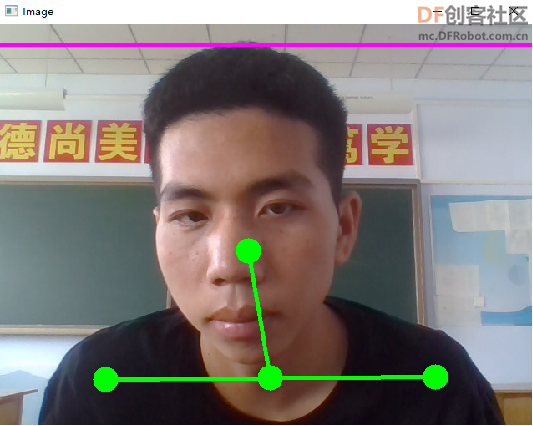 使用print(near)语句,经过不断测试,离桌远近的判断阈值,最终确定阈值为,当Har大于220认定离桌过近。 8.确定左右歪头的阈值 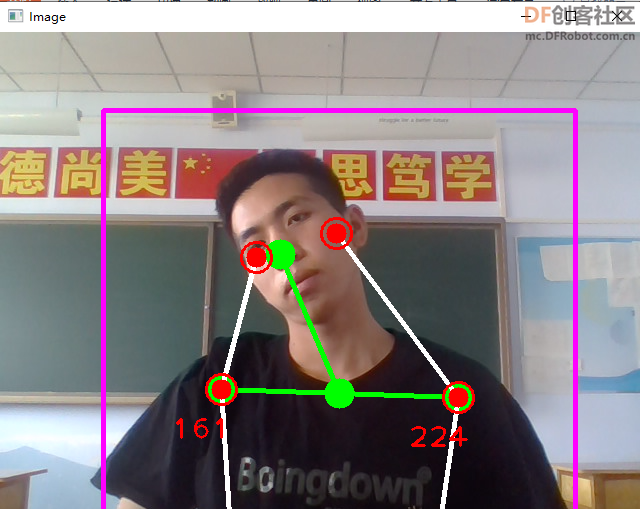 经过不断测试,确定左右歪头的阈值,最终向右阈值为225,如大于225为向右歪头,向右阈值为135,如小于135为向左歪头。并使用语音合成进行语音提醒。  将Arduino程序提前下载到,Lattepanda集成的Leonardo板中,接收Mind+程序通过串口传来的指令,控制Arduino GPIO,驱动灯带。   【演示视频】 【制作反思】 本项目作品虽实现部分不正确坐姿的判断,但还有多种不正确坐姿未能实现有效识别,有改进的空间。 1、装置放在正前方,由于学习课桌的遮挡,无法识别腰部以下姿态关键点,所以不能判断如翘二郎腿等不正确坐姿,所迭代作品考虑增加从侧面检测功能,以识别翘二郎腿不良坐姿进行提醒。 2、因不同年龄,不同性别等原因,在头肩横纵比上会有一定差异,所以迭代作品,会增加预识别,根据实际使用者进行阈值设定功能 3、未能实现对于人体姿态动态的识别,如抖腿等不正确坐姿,可以使用连续时间段内,腿的高度变化频率来进行判断。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶










 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创客造
创客造
 编辑选择奖
编辑选择奖
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






