|
14676| 5
|
[M10项目] 行空板——Micro:bit——加速度计计算倾斜方位 |

|
本帖最后由 云天 于 2022-10-4 19:43 编辑 【行空板——加度计】 行空板上ICM-20689追踪物体运动6轴IMU惯性传感器在同一个硅芯片上配有3轴陀螺仪和3轴加速度计,是市场上性能的传感器,具有的噪音、的温度稳定性和的灵敏度精度。  【micro:bit——加速度计】 micro:bit主板上配备有一个加速度计,可以测量X,Y,Z轴的运动,横向左右移动为X轴,纵向前后移动为Y轴,高低上下移动为Z轴,可以很好的检测mincro:bit在空间中的位置以及移动方向。每一根轴都有一种方法,返回一个整数或者负数,当读数为0的时候,在该轴方向是水平的。 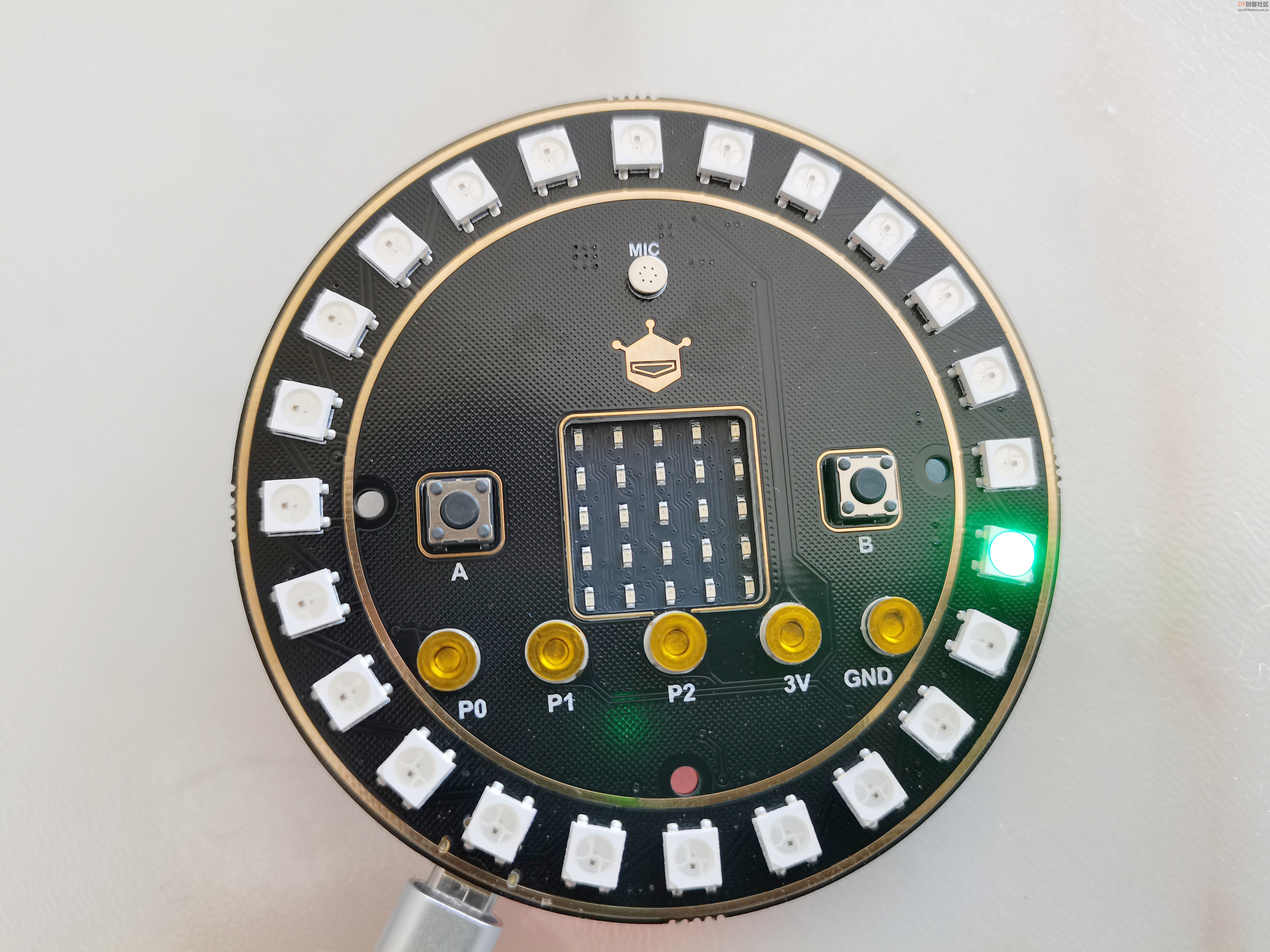 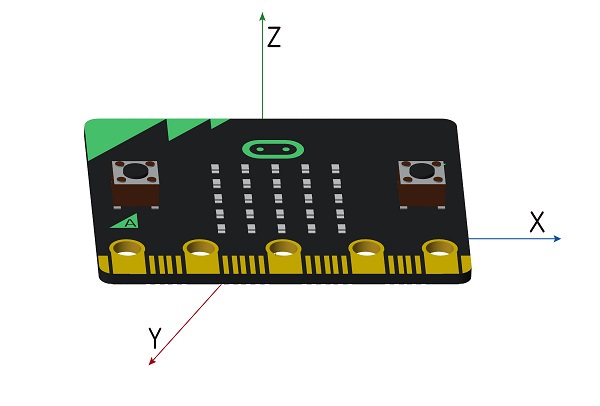 【欧拉角】 pitch是俯仰角,是“点头“,(在固定翼飞机中则由升降舵舵机控制) yaw是偏航角,是‘摇头’,(在固定翼飞机中则由方向舵舵机控制) roll是旋转角,是“翻滚”,(在固定翼飞机中则由副翼舵机控制) 欧拉角是表达旋转的最简单的一种方式,形式上它是一个三维向量,其值分别代表物体绕坐标系三个轴(x,y,z轴)的旋转角度。这样的话,很容易想到,同样的一个三维向量,代表了绕x,y,z的旋转值,先进行那个旋转是否对结果有影响呢?显然是有影响的,可以拿着你的手机试一下,不同的旋转顺序会代表不同的旋转结果。所以,一般引擎都会规定自己的旋转顺序。 下面三张动图形象的表示了欧拉角的旋转方式。第一张是绕x轴旋转pitch,第二张绕y轴旋转yaw,第三张是绕z轴旋转roll。    加速度计来计算侧倾和俯仰。以下是用于计算侧倾和俯仰的方程式。 pitch = 180 * atan (accelerationX/sqrt(accelerationY*accelerationY +accelerationZ*accelerationZ))/M_PI; roll = 180 * atan (accelerationY/sqrt(accelerationX*accelerationX +accelerationZ*accelerationZ))/M_PI; yaw = 180 * atan (accelerationZ/sqrt(accelerationX*accelerationX +accelerationY*accelerationY))/M_PI; M_PI = 3.14159265358979323846 【行空板——图形化编程】 Mind+编程软件,Mind+是一款集成了包括行空板在内的大量开源硬件的编程软件,它拥有非常多的图形化基础指令和扩展库。 1、获取校准数据(零点漂移) 在传感器水平静止的放在桌面上时,陀螺仪角速度的值应该为零,加速度计的X轴,Y轴的值应该为0,Z轴的值应该为8192(重力加速度g,1/4量程)。 传感器安装在设备上总有一个初始的角度,我们设这个角度为0度,那我们每一次的数据都要减去这个初始数据,得到一个相对的角度。为了保证数据的准确性,我们在初始静止的状态测量大量数据(我取了1000个),用程序算出平均值,然后以后测量的数据都要减去这个平均值。  2、完整程序 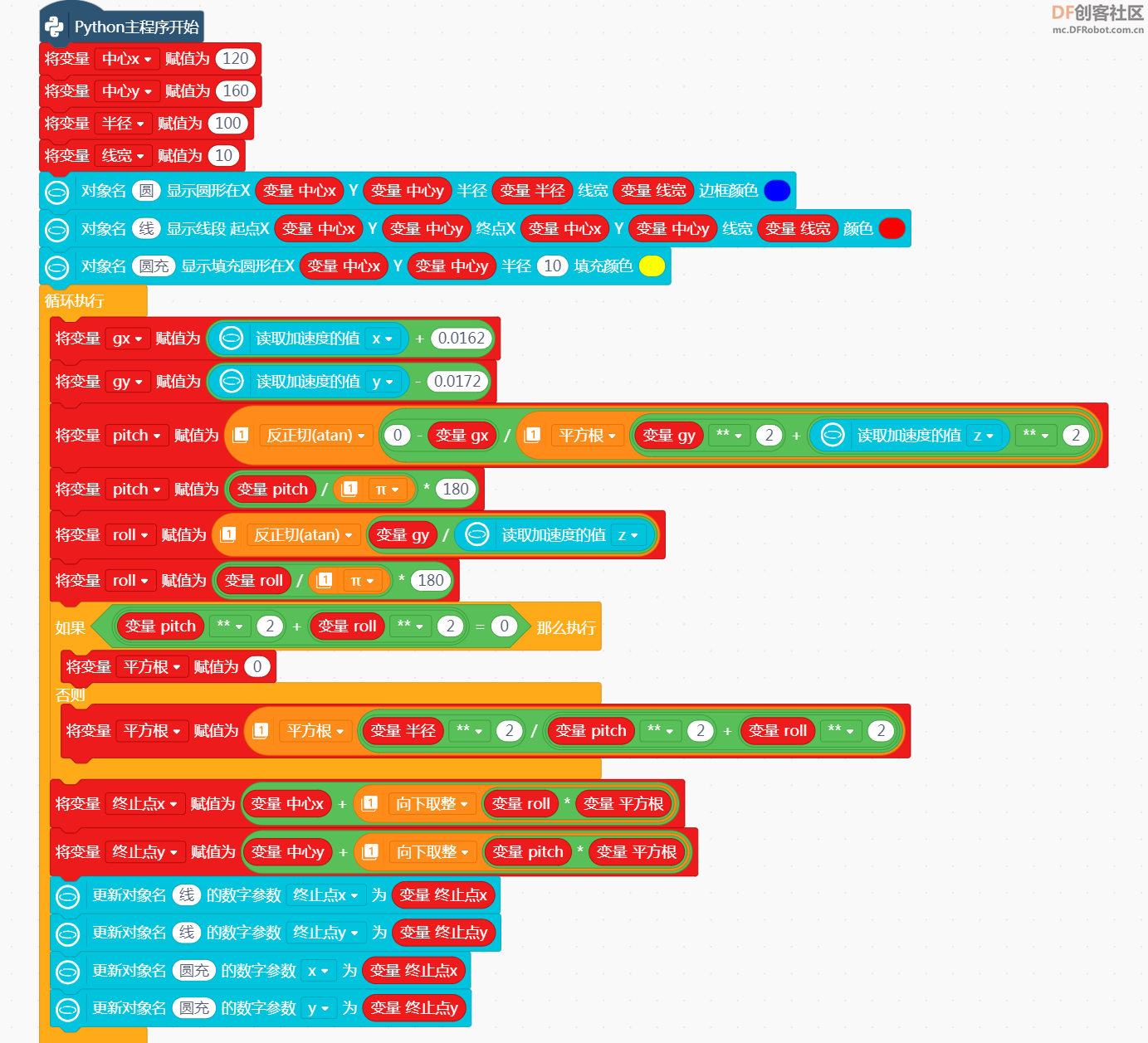 【Micro:bit编程】 1、计算roll,pitch  2、灯环共24灯,每个间隔15度,按平面直角坐标系分四个区。  3、完整程序 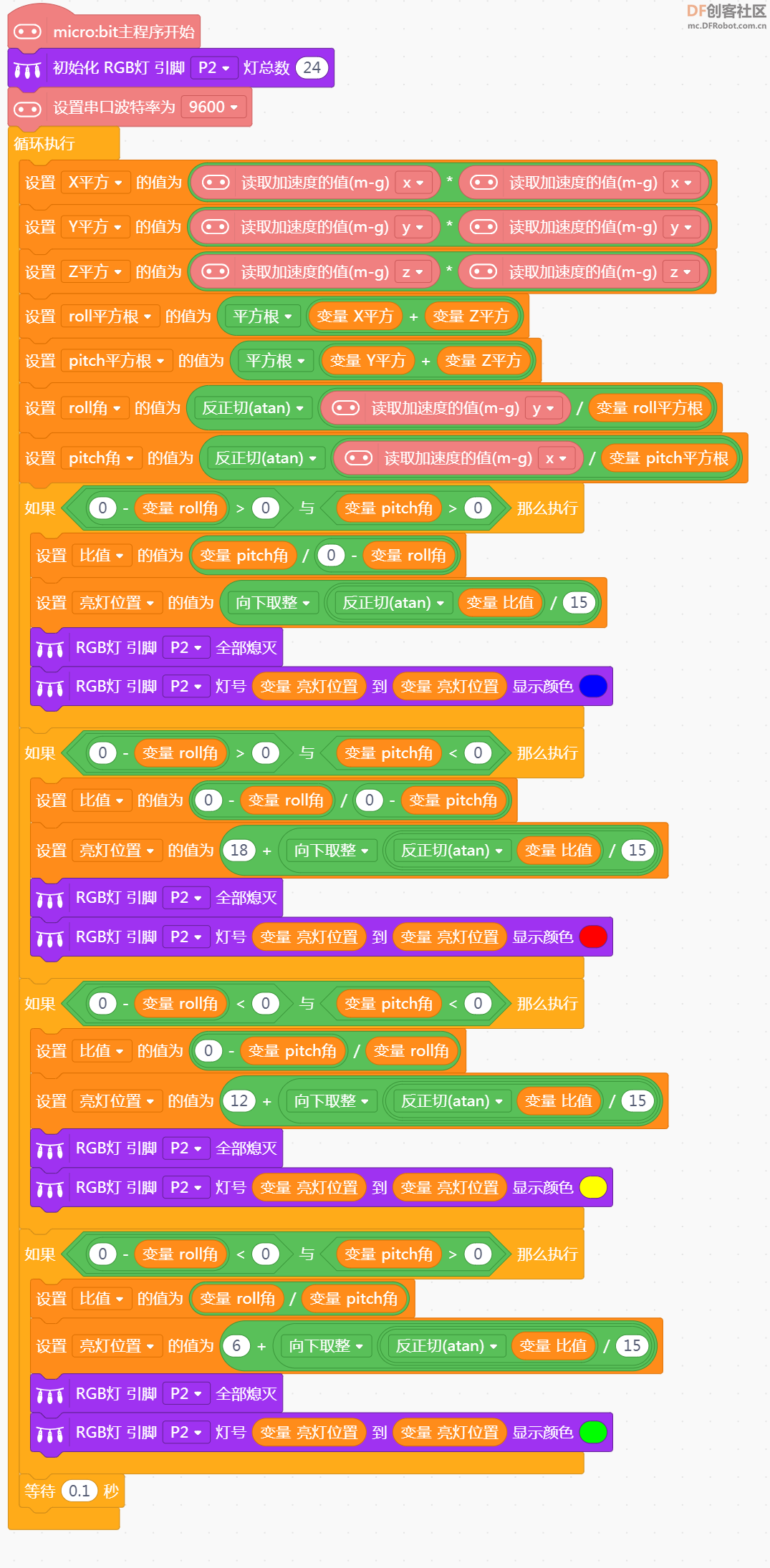 4、演示视频 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创客造
创客造
 编辑选择奖
编辑选择奖
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






