|
16957| 8
|
[项目分享] Mind+WiFiBee-MT7681————Wifi履带车 |

本帖最后由 云天 于 2022-11-23 17:02 编辑  能到外面活动好让人羡慕!!! 上个月,在DF商城购入了“履带机器人移动平台”,一直等到闺女放假回来组装起来。为了能让履带车实现可远程遥控,使用了“IO Expansion & Motor Driver Shield ”、“WiFiBee-MT7681”、“MIT APP Inventor2”。 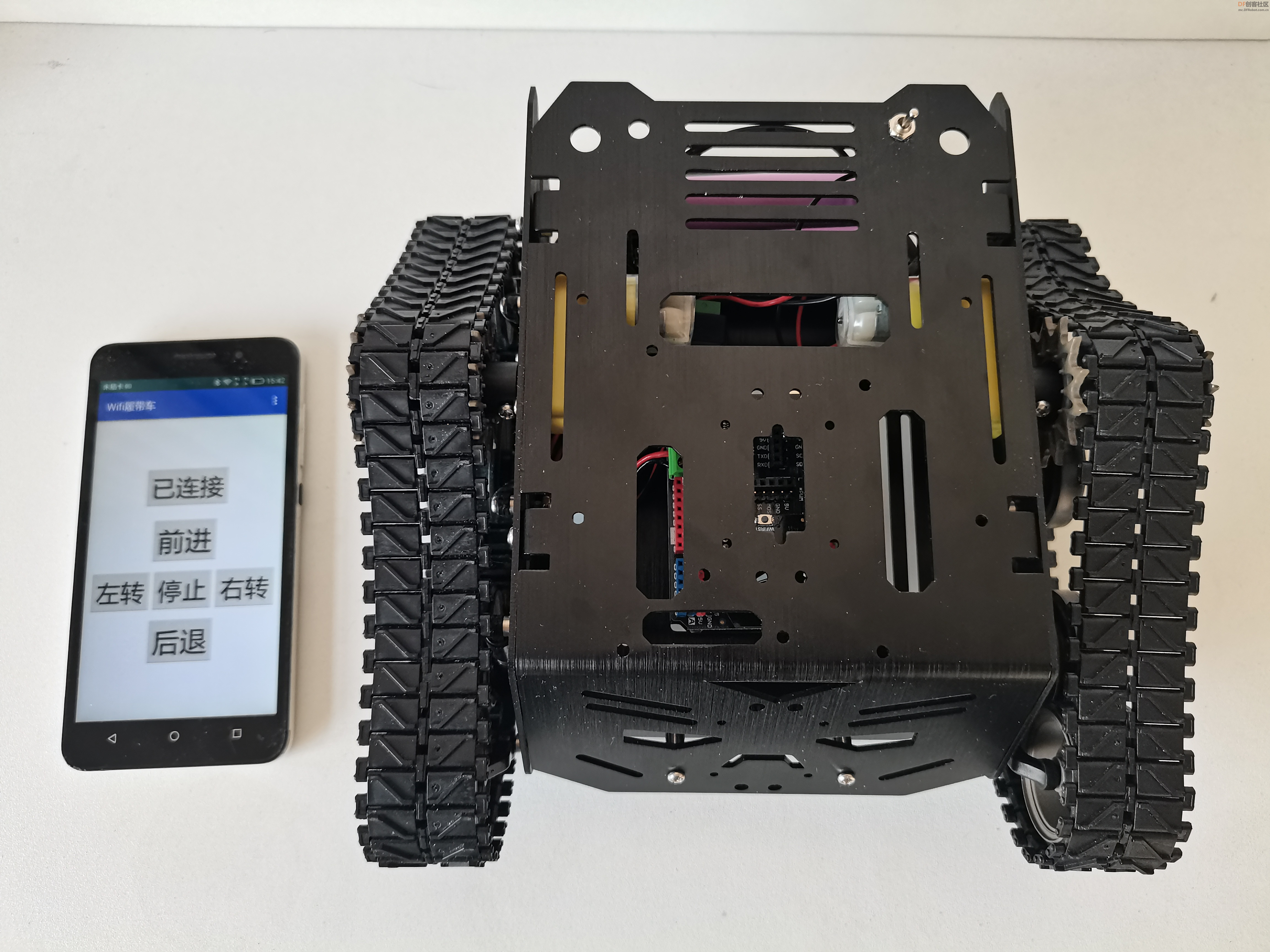 【组装硬件】 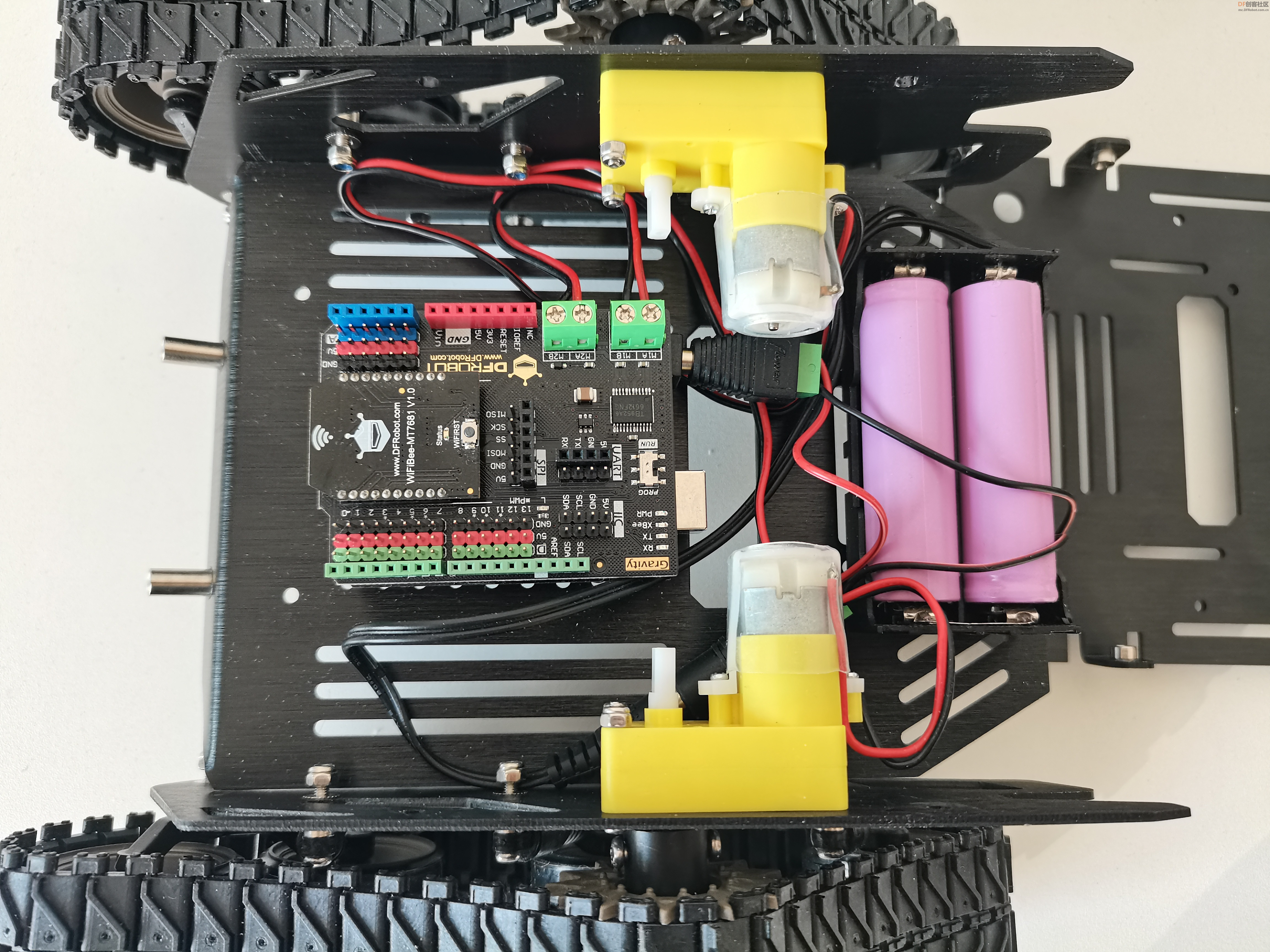 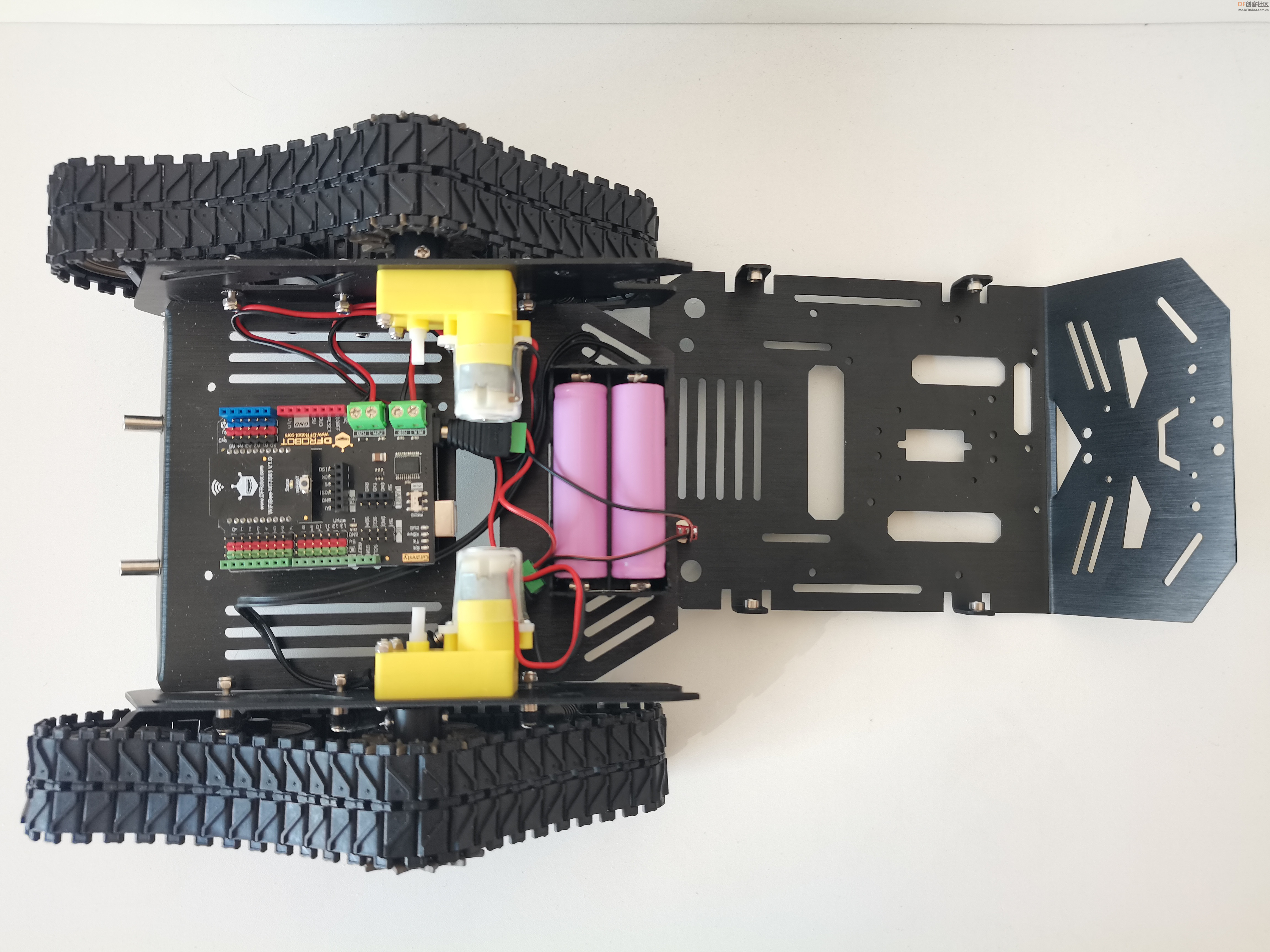 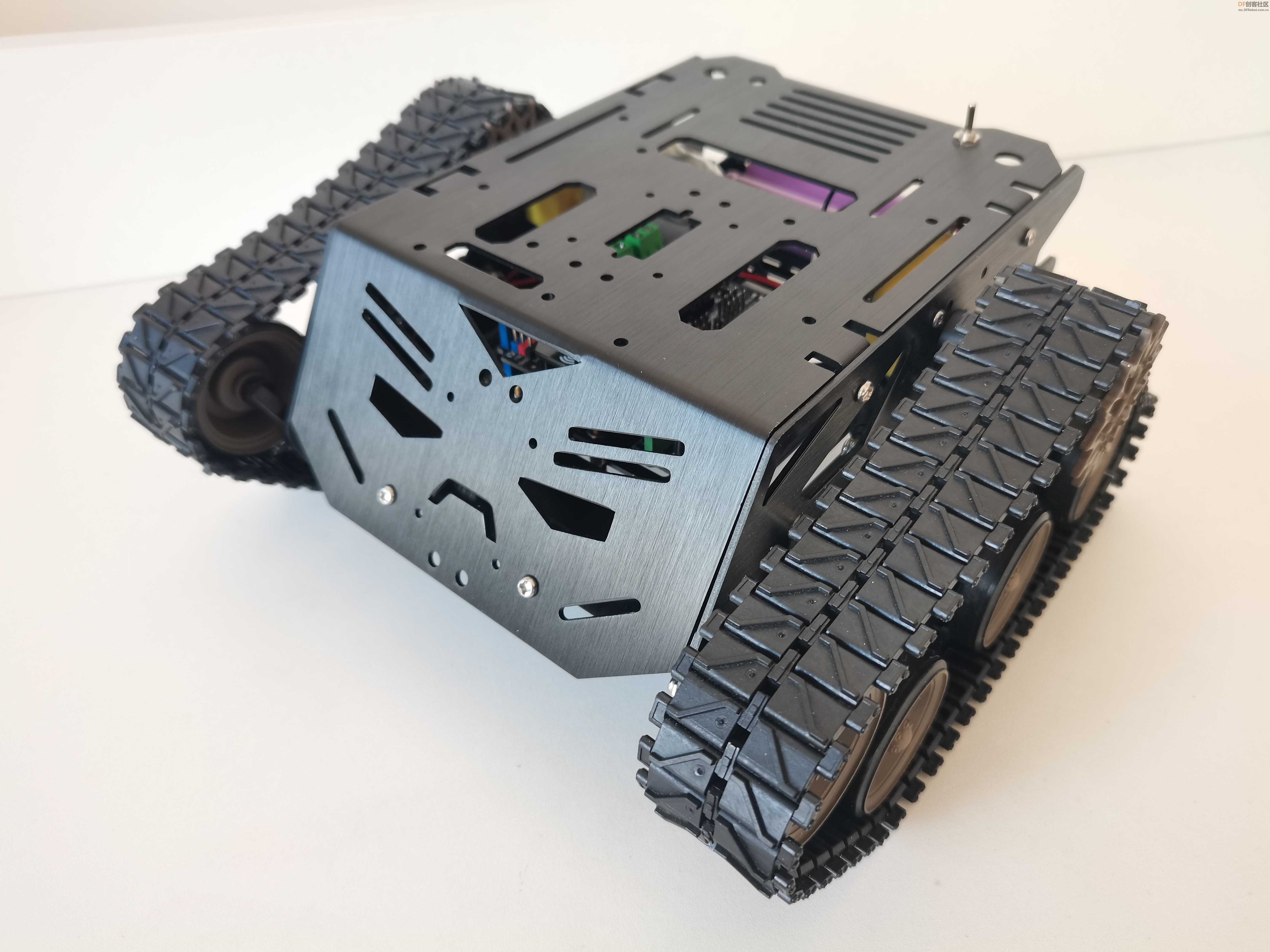 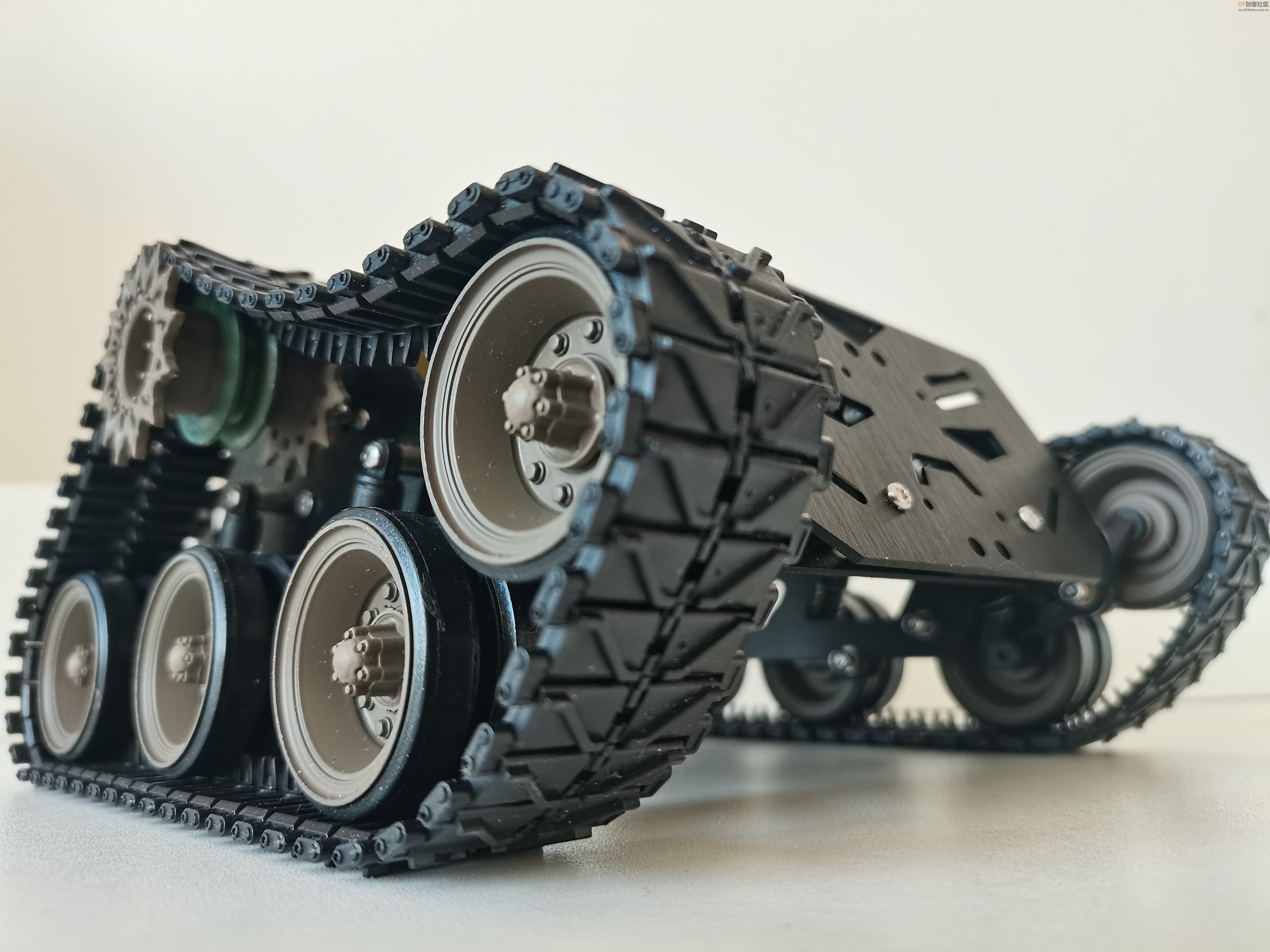 【WiFiBee-MT7681】 (支持Arduino WiFi无线编程)WiFiBee-MT7681是一块基于MT7681开发的串口WiFi模块,兼容Xbee通用接口,支持Arduino Wi-Fi无线下载程序,是一块面向物联网(IOT),智能家居等无线控制领域的产品。 【tcp客服端连接】 红色箭头表示数据传输模型,该模型中数据通过WiFiBee转发,让arduino具有访问远程tcp 服务器或客服端能力。数据通路可以是1<-->2, 1<-->3。 当WiFiBee的1000端口与远程tcp客服端连接或者WiFiBee连接了一个远程的tcp服务器时。UART会配置为纯数据模式,此时WiFiBee会自动将接收到的串口数据转发到远程的tcp客服端或者远程的tcp服务器。 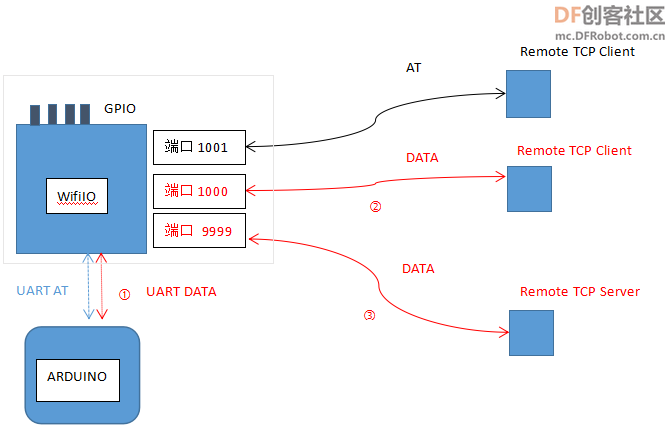 【Mind+编程】 1.通过Mind+代码配置无线网络参数  将上面的代码下载到uno中。 将WiFiBee-MT7681插到IO扩展板上,将IO扩展板插在UNO上,调节IO扩展板开关至 "RUN"上。 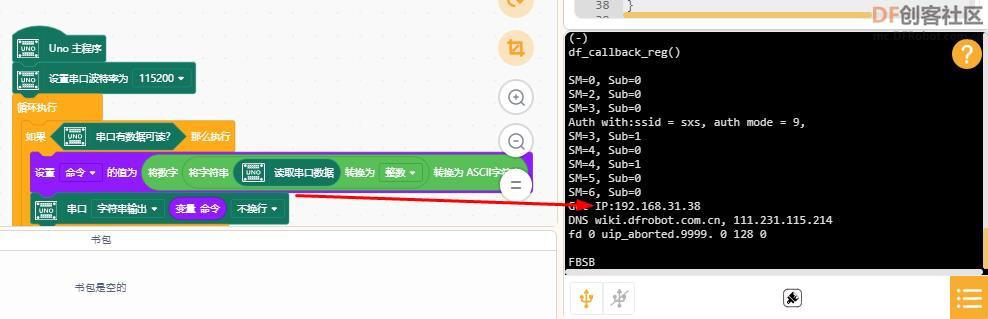 为UNO上电,打开串口监视器,查看IP地址。 注意:扩展板的开关是串口开关,当使用USB下载时,需要调节到”PROG“端,当使用无线下载时,需要调节到”RUN“端。 2.接收指令,驱动电机 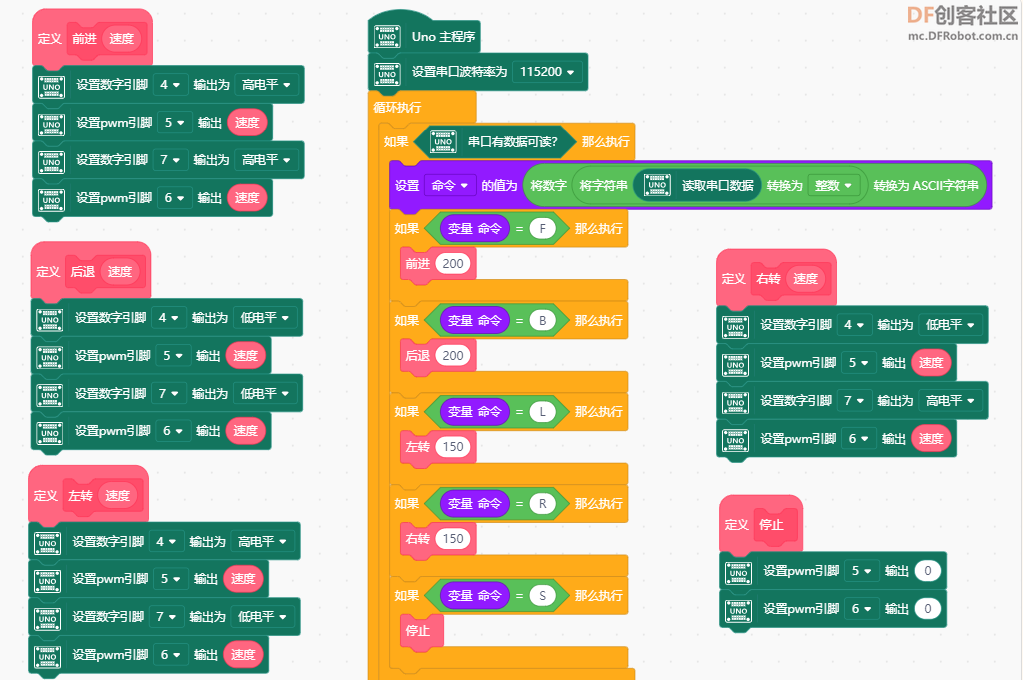 通过接收“WiFiBee-MT7681”从串口传来的指令,驱动电机转动,实现履带车“前进”、“后退”、“左转”、“右转”、“停止”。 【MIT APP Inventor2编程】 1、界面设计 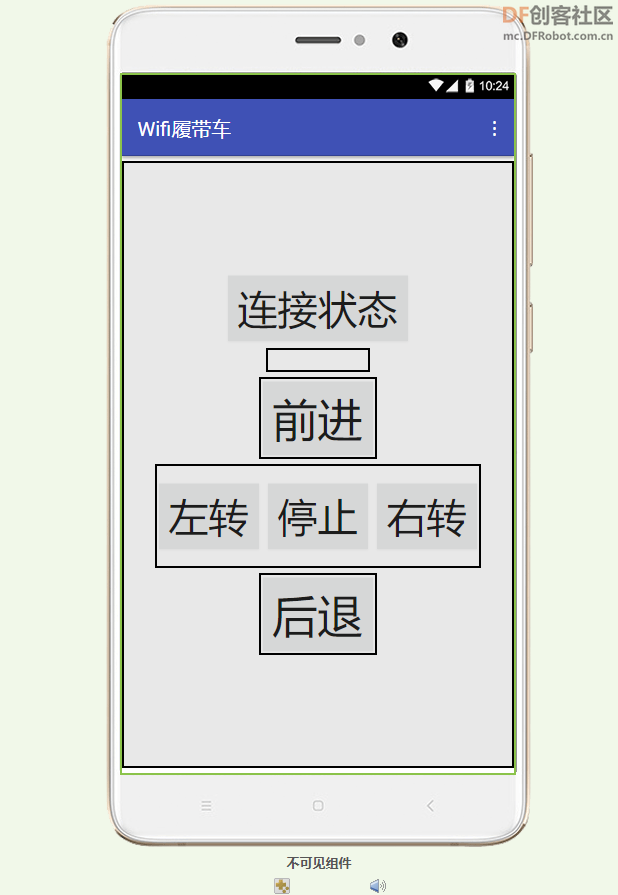 2.app inventor的tcp连接扩展插件下载地址及加载方法。配置TCP扩展插件,参数参考Mind+程序获得IP地址。 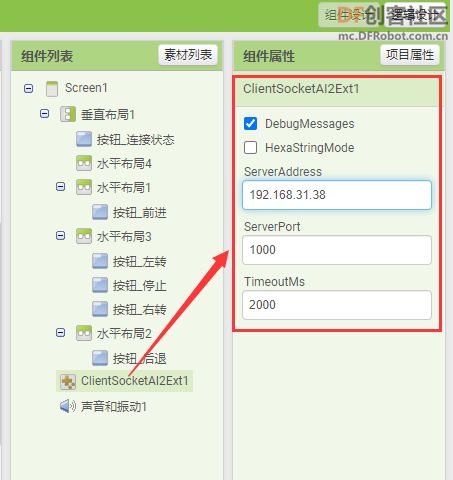 3、完整程序 屏幕初始化时,通过TCP扩展连接“WiFiBee-MT7681”。 当点击相应按钮,通过TCP扩展发送相应指令:“前进”——“F”,"后退”——“B”,"左转”——“L”,"右转”——“R”,“停止”——“S”。 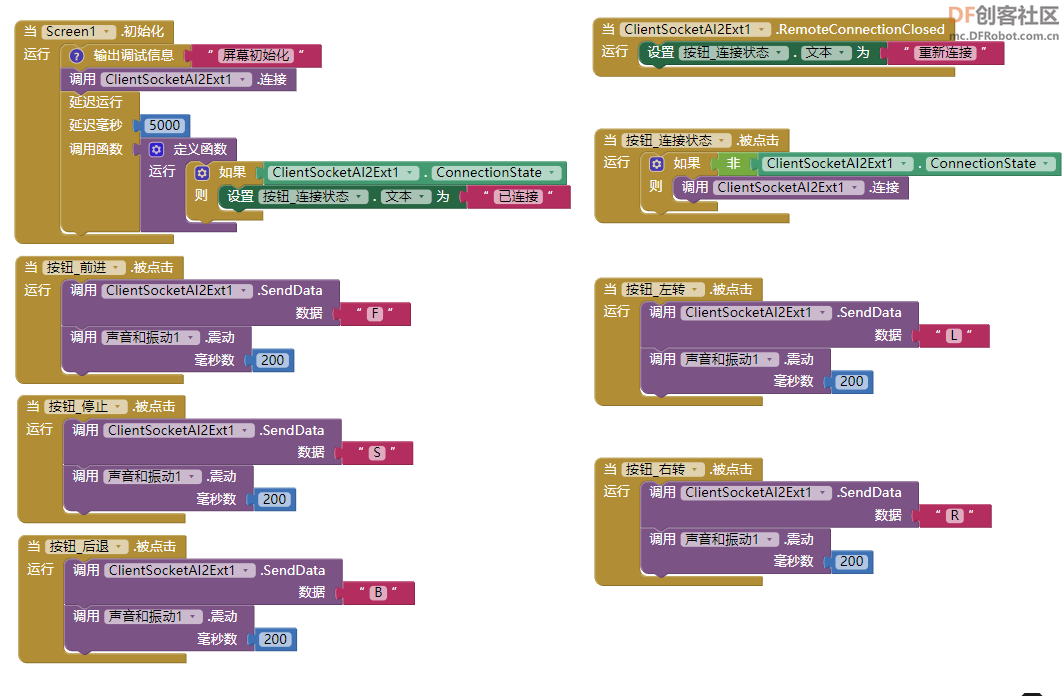 【演示视频】 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶 向大佬学习!
向大佬学习!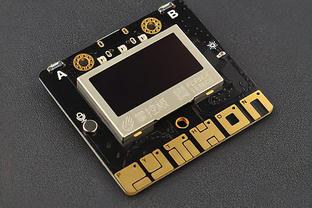




 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创客造
创客造
 编辑选择奖
编辑选择奖
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






