|
22062| 5
|
[项目] 变脸机器人 |

本帖最后由 章 于 2020-11-30 16:33 编辑  【视频演示】 以前曾写过一篇“萌庞机器人”的帖子,作品效果图如下图(访问帖子请点击图片) 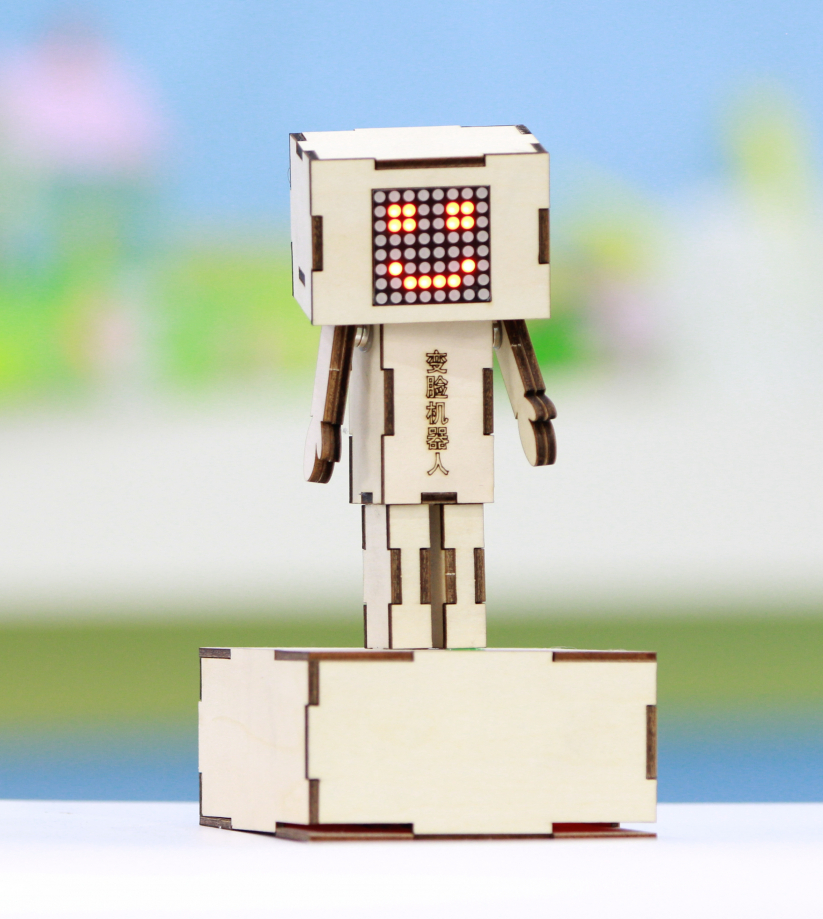 本来想把这个案例作为学校拓展课的一个经典案例,但在实际教学过发现这个机器人的设计及搭建对小学生来说难度有点大,效果还是很好,所以就有了改进的想法,于是就有了现在这个变脸机器人的作品案例。 【功能描述】 1、事先通过编程设计一些表情显示图形,通过按键来切换不同的表情或显示一组组动态表情包。 2、机器人各个关节通过铆钉连接,这样头部、手和脚都可以灵活转动。 3、通过改变各个关节的角度来实现机器人的姿态,再加上与之相对应的表情,使之与周围环境相融合,从而形成不同的情景场面,也可以通过拍摄一组图片或视频来形成一段小动画。 【硬件清单】 DFRduino UNO R3 1 IO 传感器扩展板 V7.1 1 MAX7219 8*8点阵显示模块 1 按钮模块 1 杜邦线等 激光切割结构件 【结构设计与搭建】 1、激光切割件设计 我们先利用软件在电脑中设计出其外壳,并用激光切割机切割椴木板外壳。 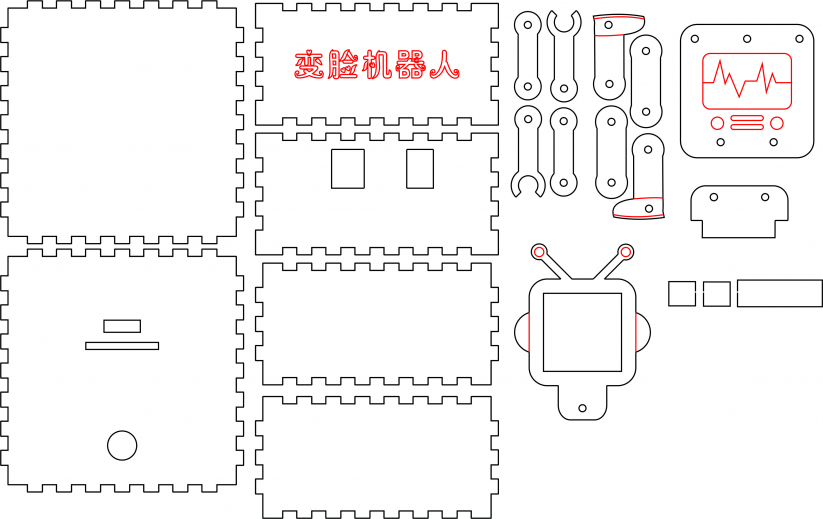 2、把5根90度直角排针焊接在模块的输入接口上,排针的方向向内,这样接线时杜邦线就会向内藏在点阵的后面,以免影响美观。如下图: 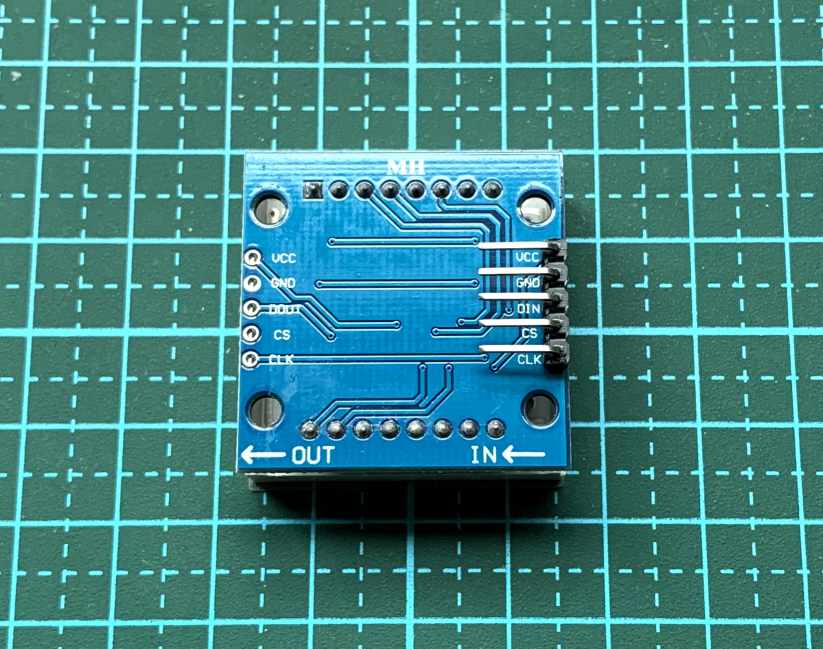 3、把8*8点阵显示模块安装到机器人的头部位置,用热熔胶固定,安装时注意点阵前部面板与头部面板对齐。如下图: 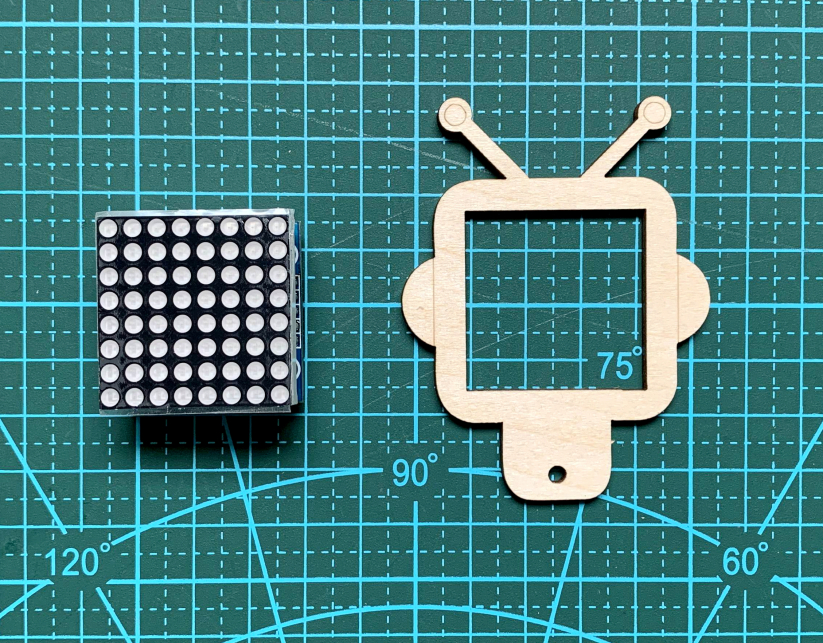 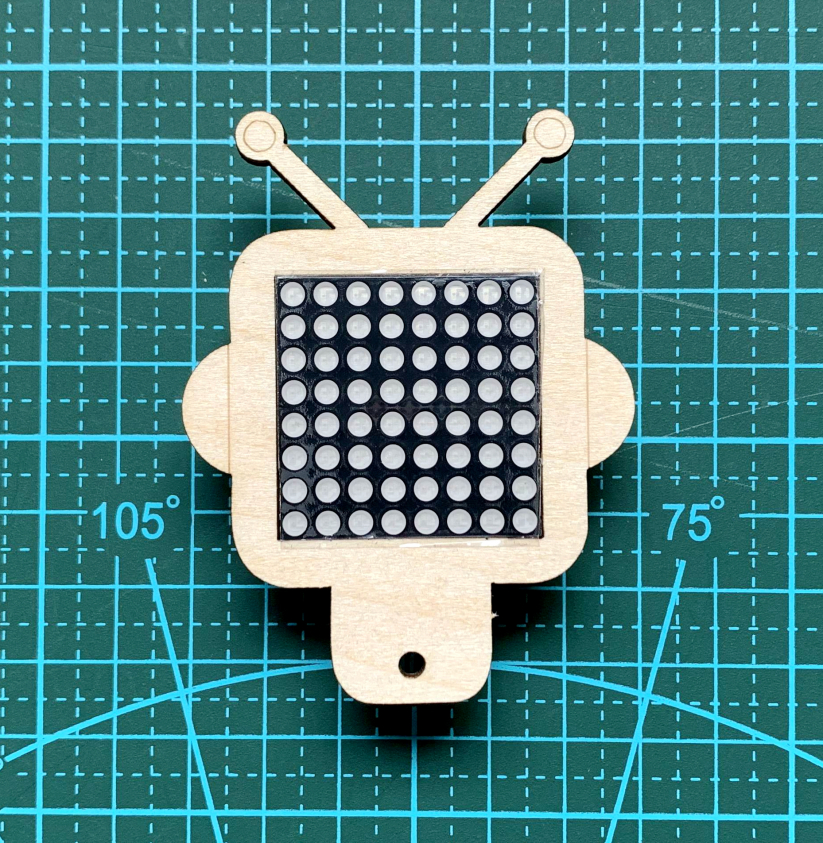 4、利用铆钉把头部、躯干及四肢连接在一起,这里的铆钉规格是R3080。如下图: 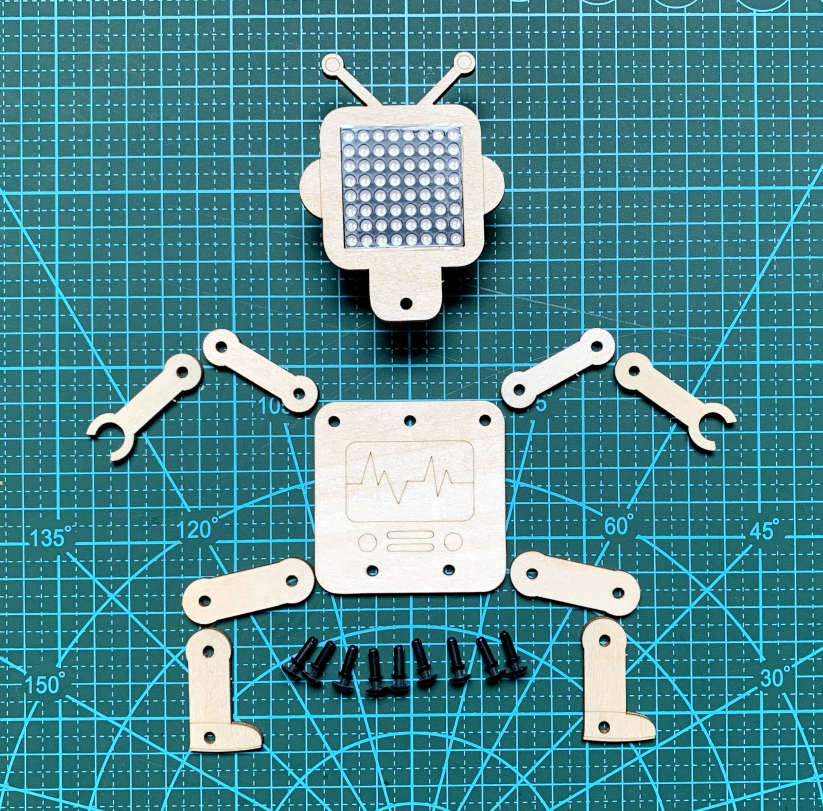 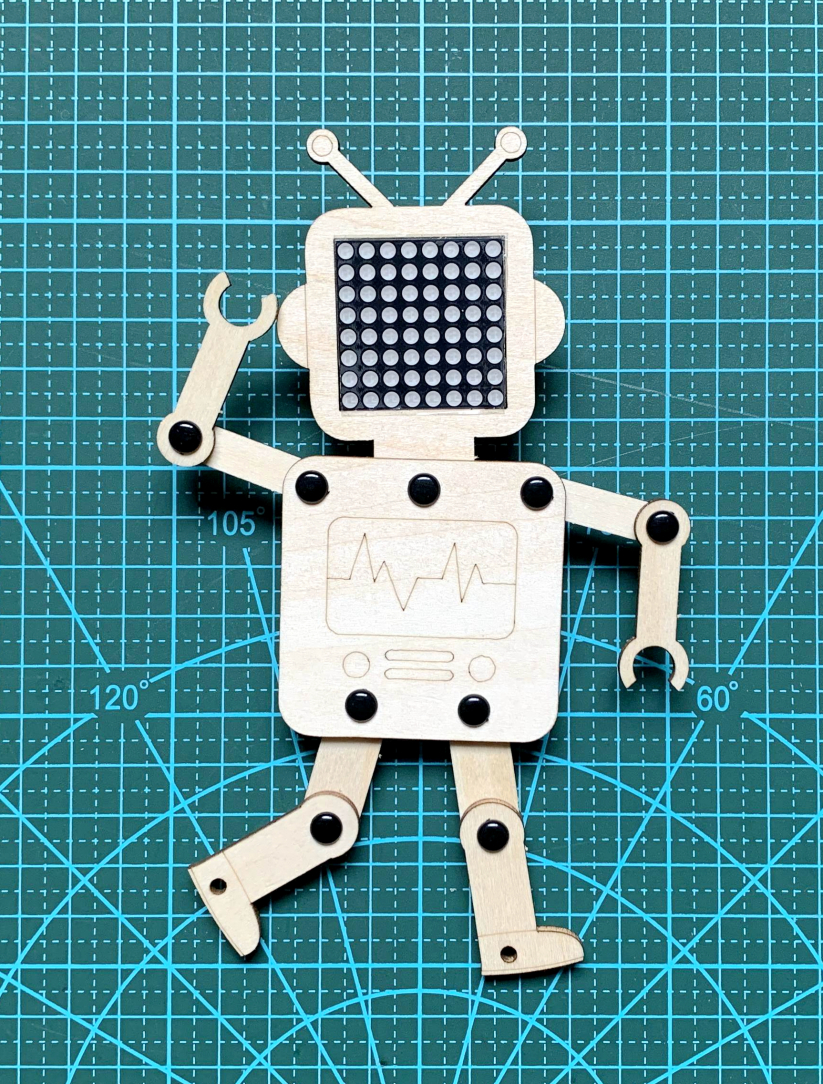 5、用热熔胶把开关模块我脚部固定板安装在面板上。如下图: 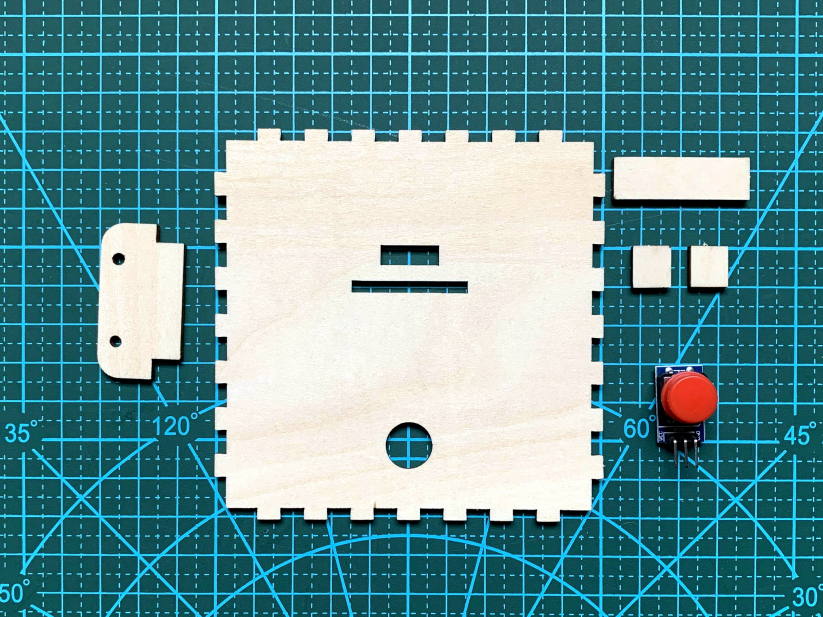 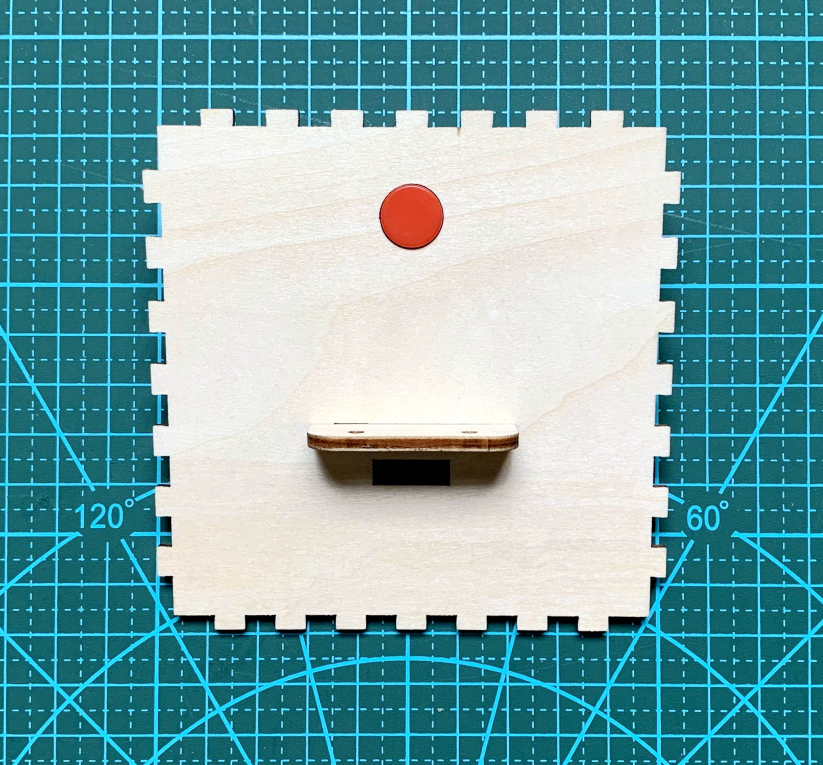 6、把IO传感器扩展板插在DFRduino UNO R3上并用热熔胶固定在底板上,固定时注意位置,使主控板的数据口与电源接口与侧面板的开口对齐。如下图: 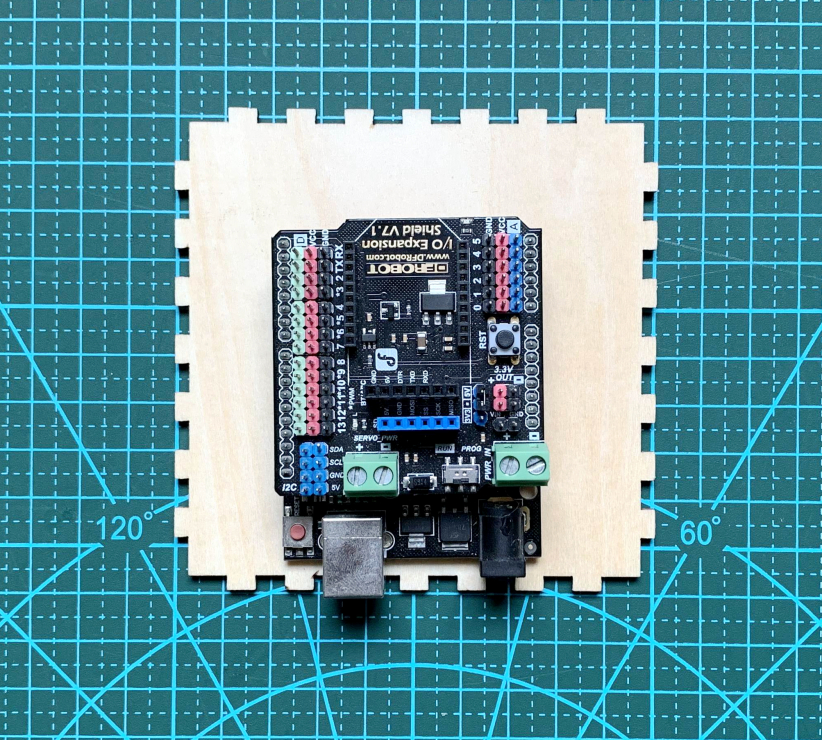 7、把四个侧面板与底板组合起来。如下图: 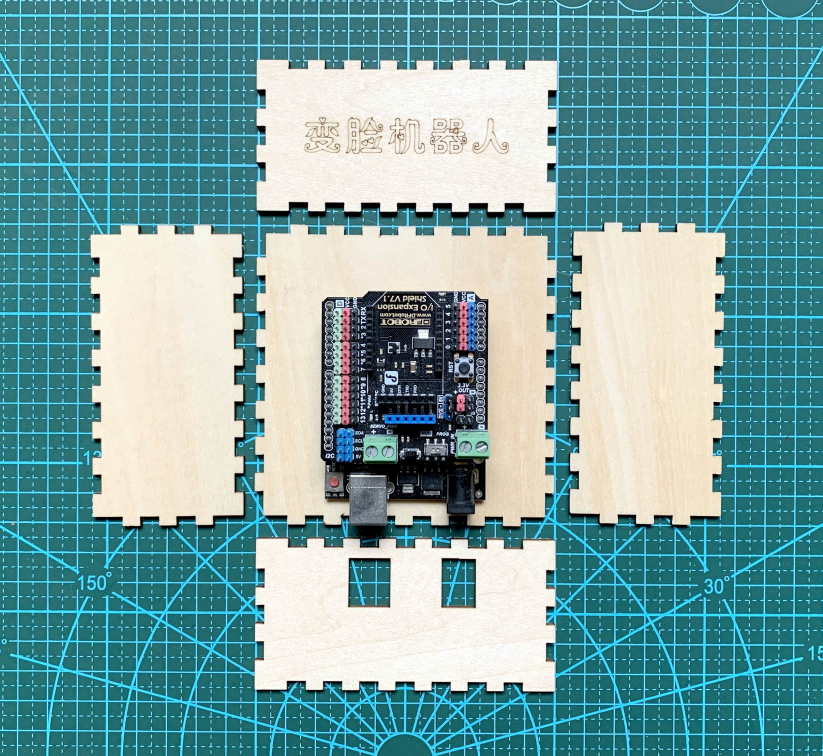 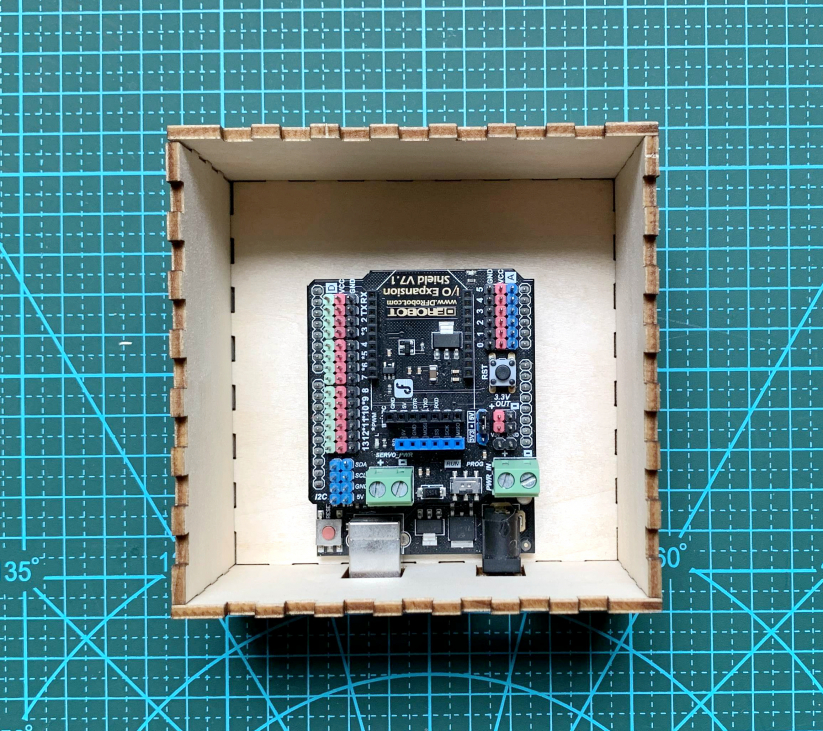 8、把点阵模块和按键模块用杜邦线接在主控板相应的接口上。如下图: 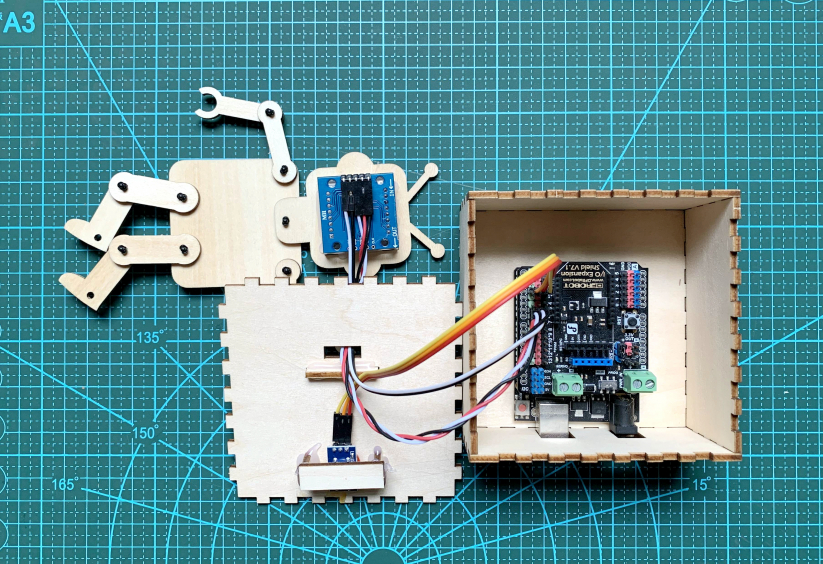 9、把底坐面板盖上,用铆钉把机器人的一只脚固定在底座上,这样整个结构就组装好了。如下图: 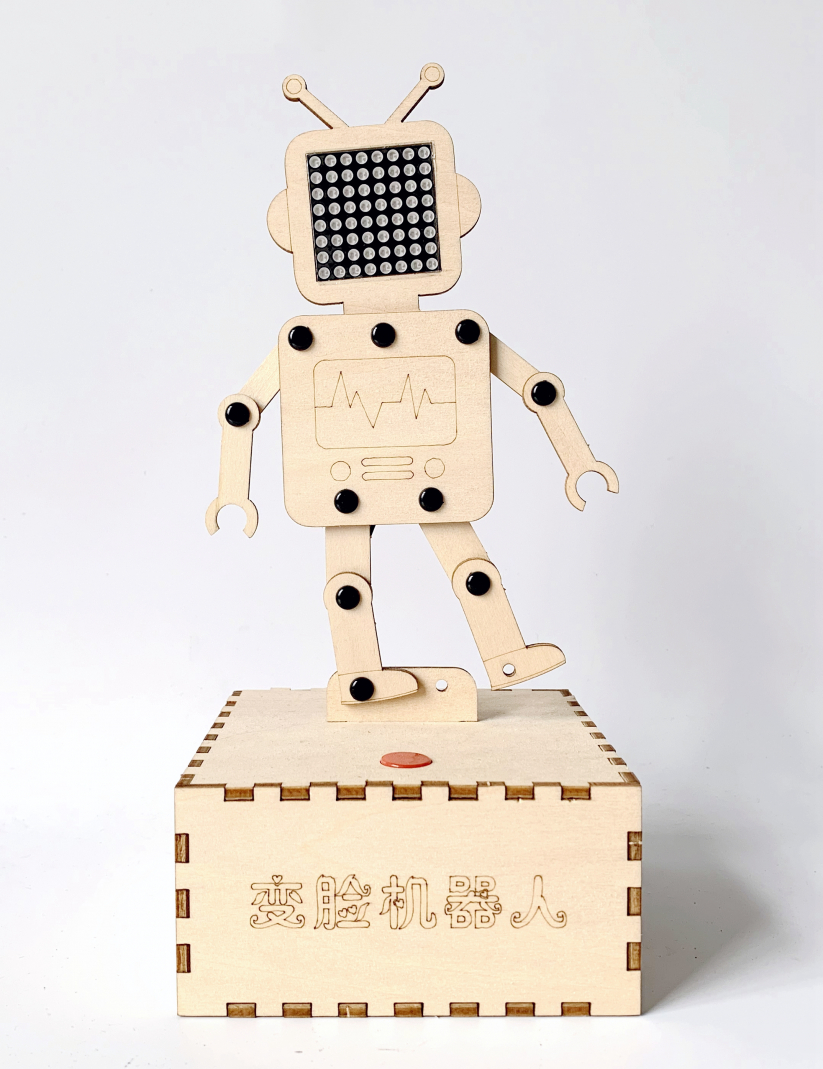 【电路连接图】 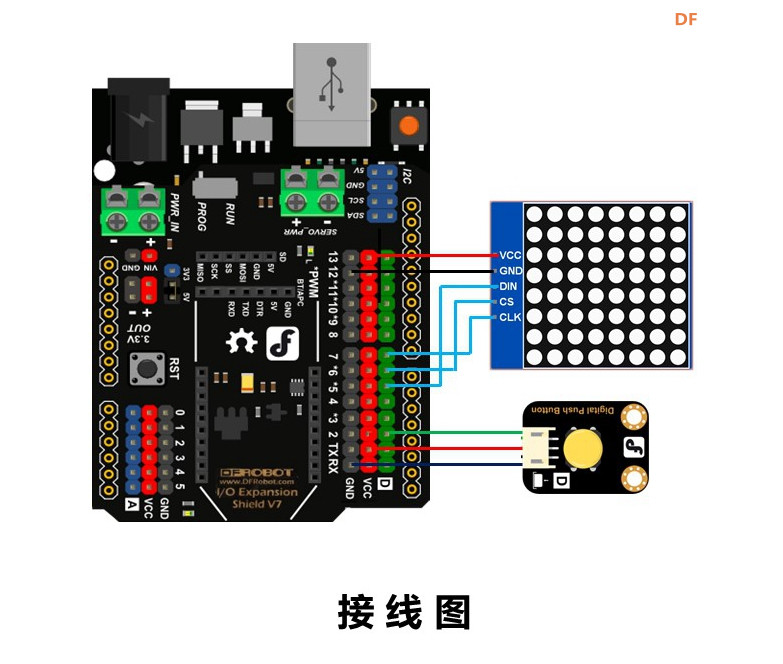 【程序编写】 1、程序的编写软件是Mind+,打开Mind+软件,切换到上传模式,接着点击拓展打开拓展。 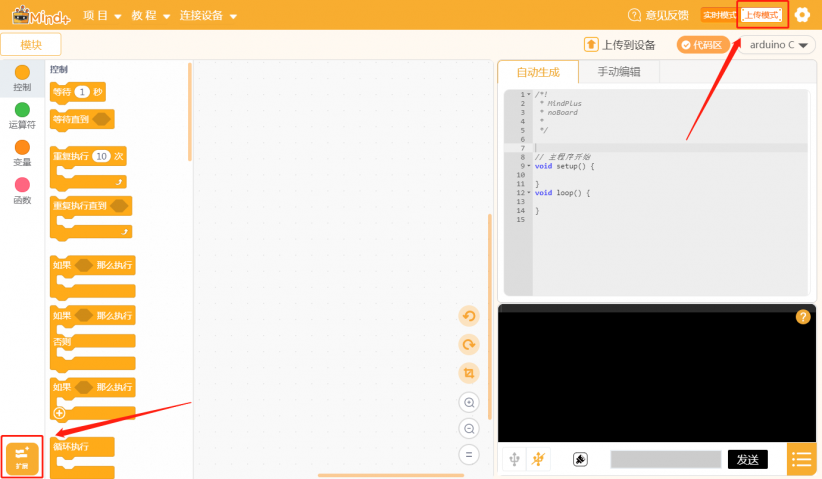 2、在主控板选项卡中选择Arduino Uno主控板。 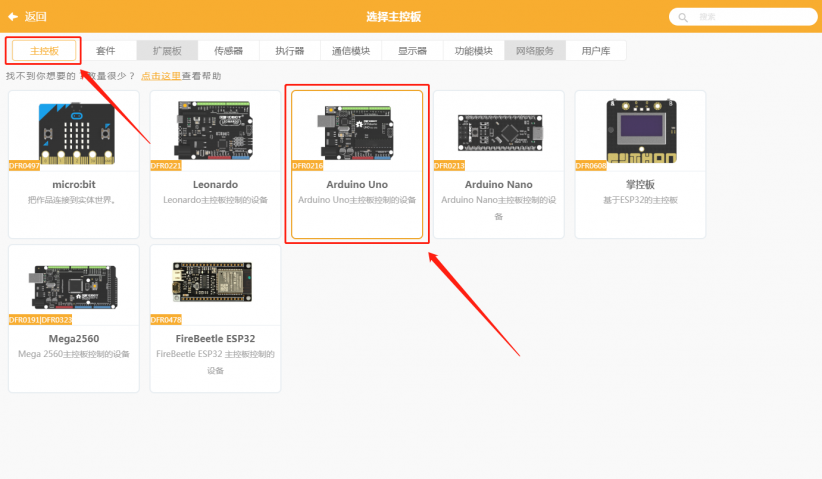 3、在显示器选项卡中选择MAX7219 8*8点阵。 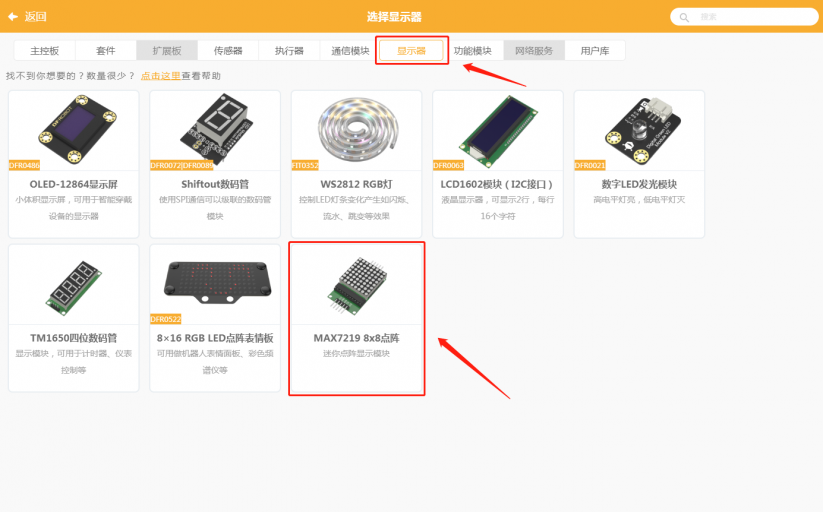 4、接下来开始正式编写程序。 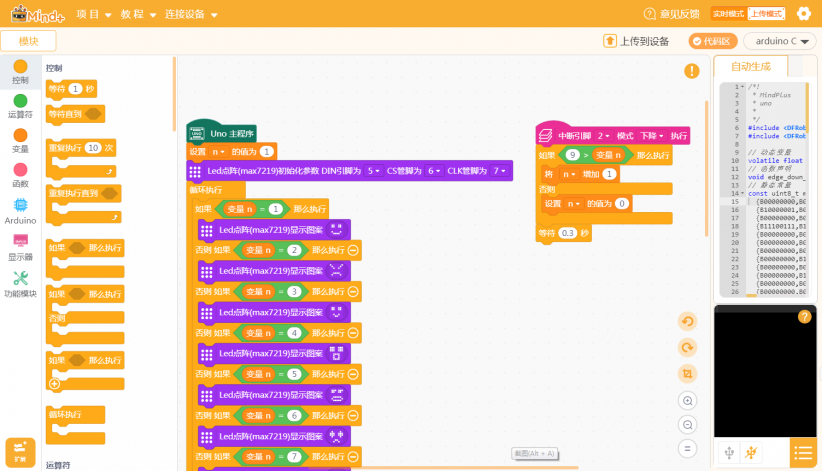 完整程序如下图: 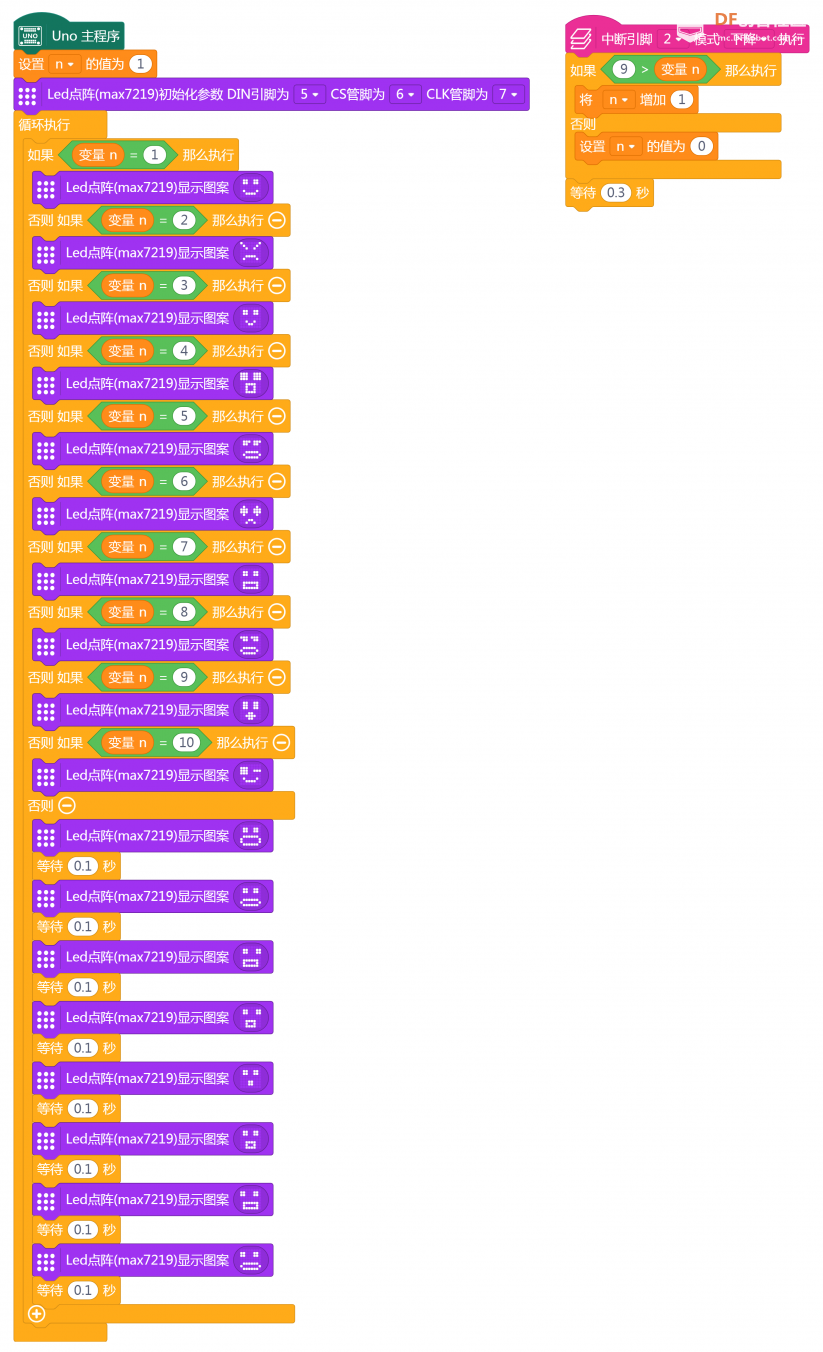 【拓展】 机器人的动作是手动摆的,后期可以考虑加上舵机来自动控制。 ◆ 防近视笔筒 ◆ 猜拳机器人 ◆ 炫彩小夜灯 ◆ 小便池自动冲洗器 ◆ 百变乐器 ◆ 留言机 ◆ 智能储蓄罐 ◆ 看得见的心跳 ◆ 保险箱 ◆ 激光打靶器 ◆ 钥匙忘带提醒器 ◆ 麦昆智能晾衣架 ◆ DIY留声机 ◆ 智能马桶 ◆ 坐姿矫正仪 ◆ 龙舟 ◆ 多脚怪 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖






