|
8044| 6
|
[K10项目分享] 行空板k10——行空电子宠物狗 |

|
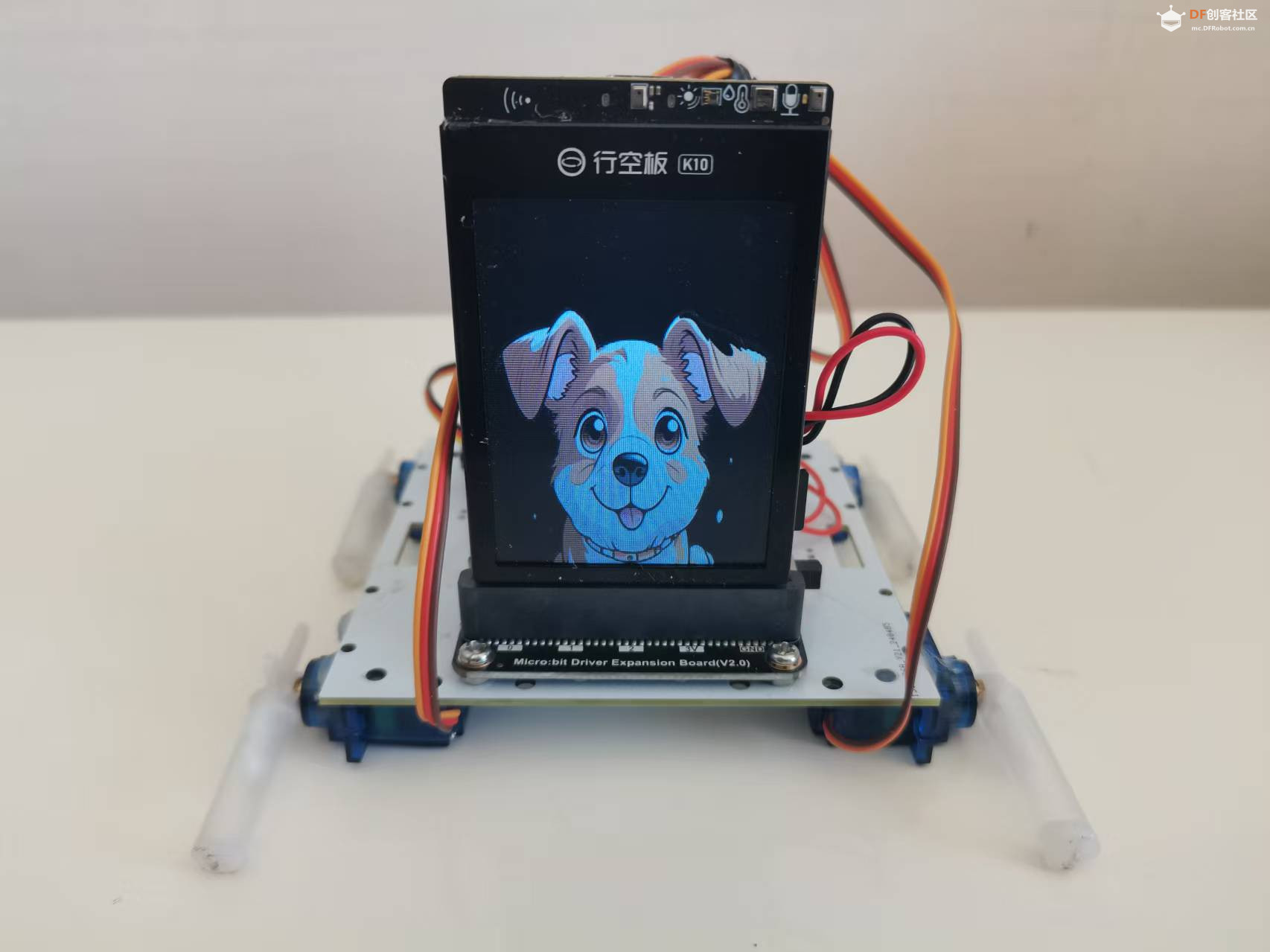
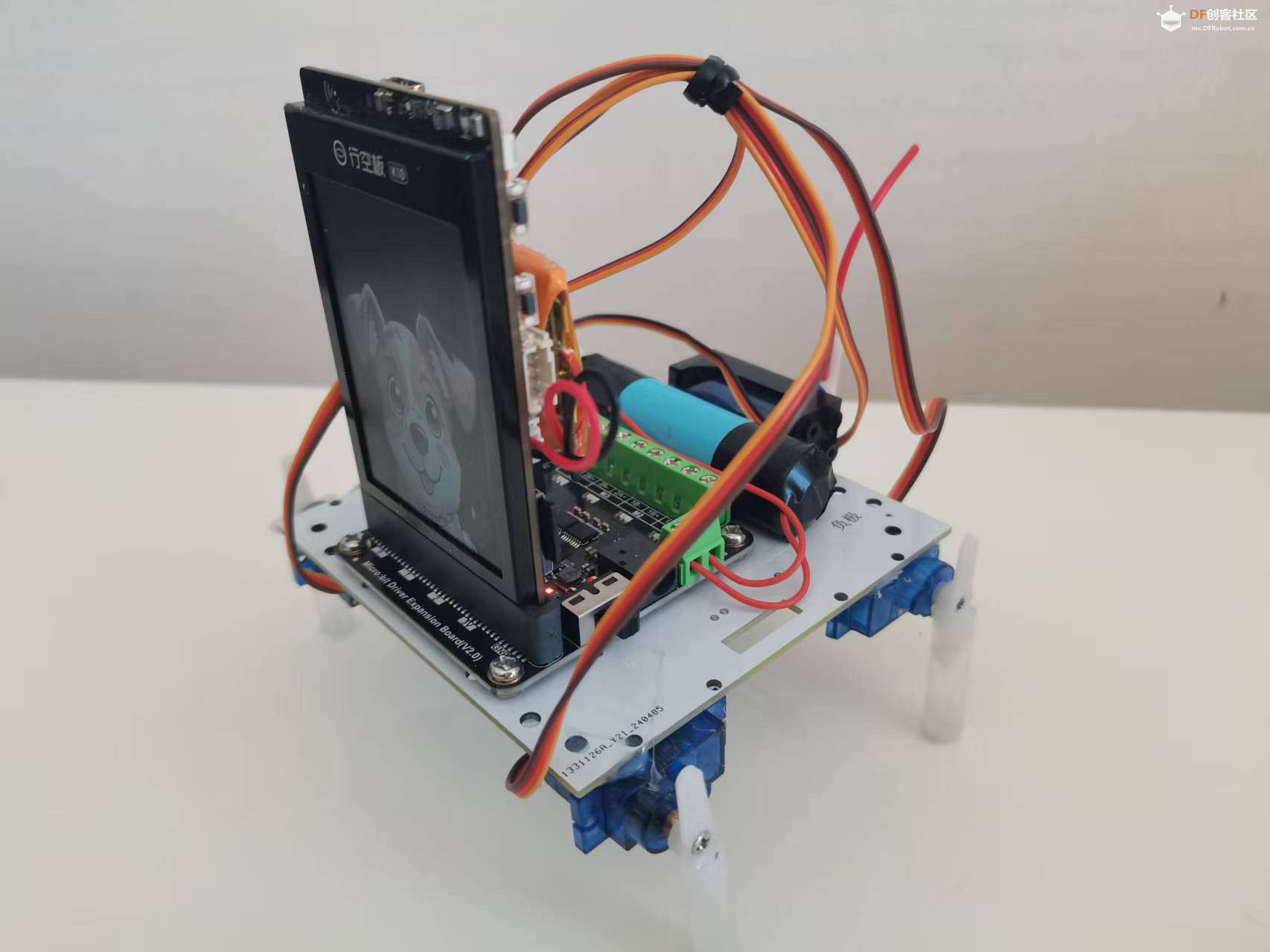
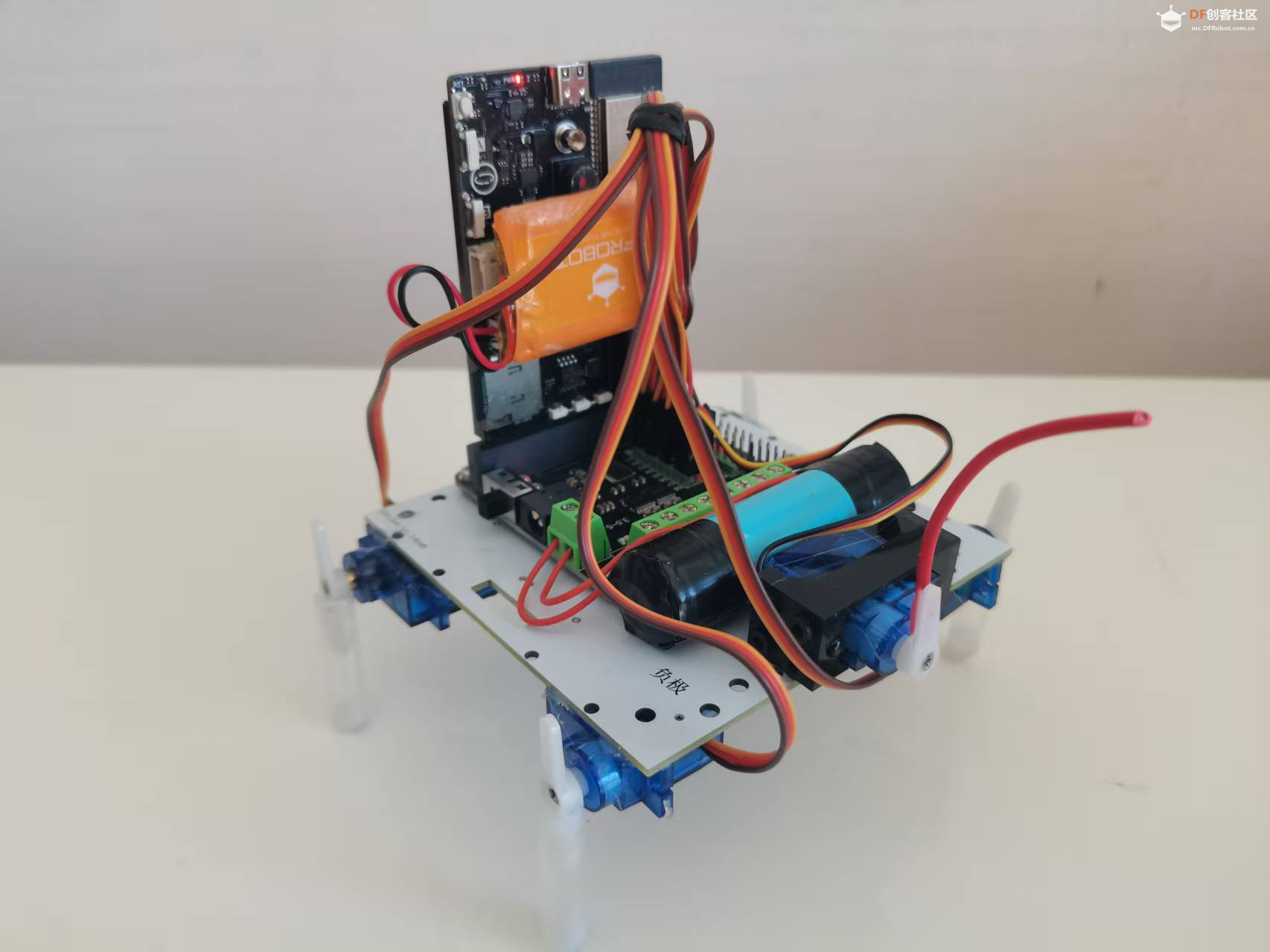
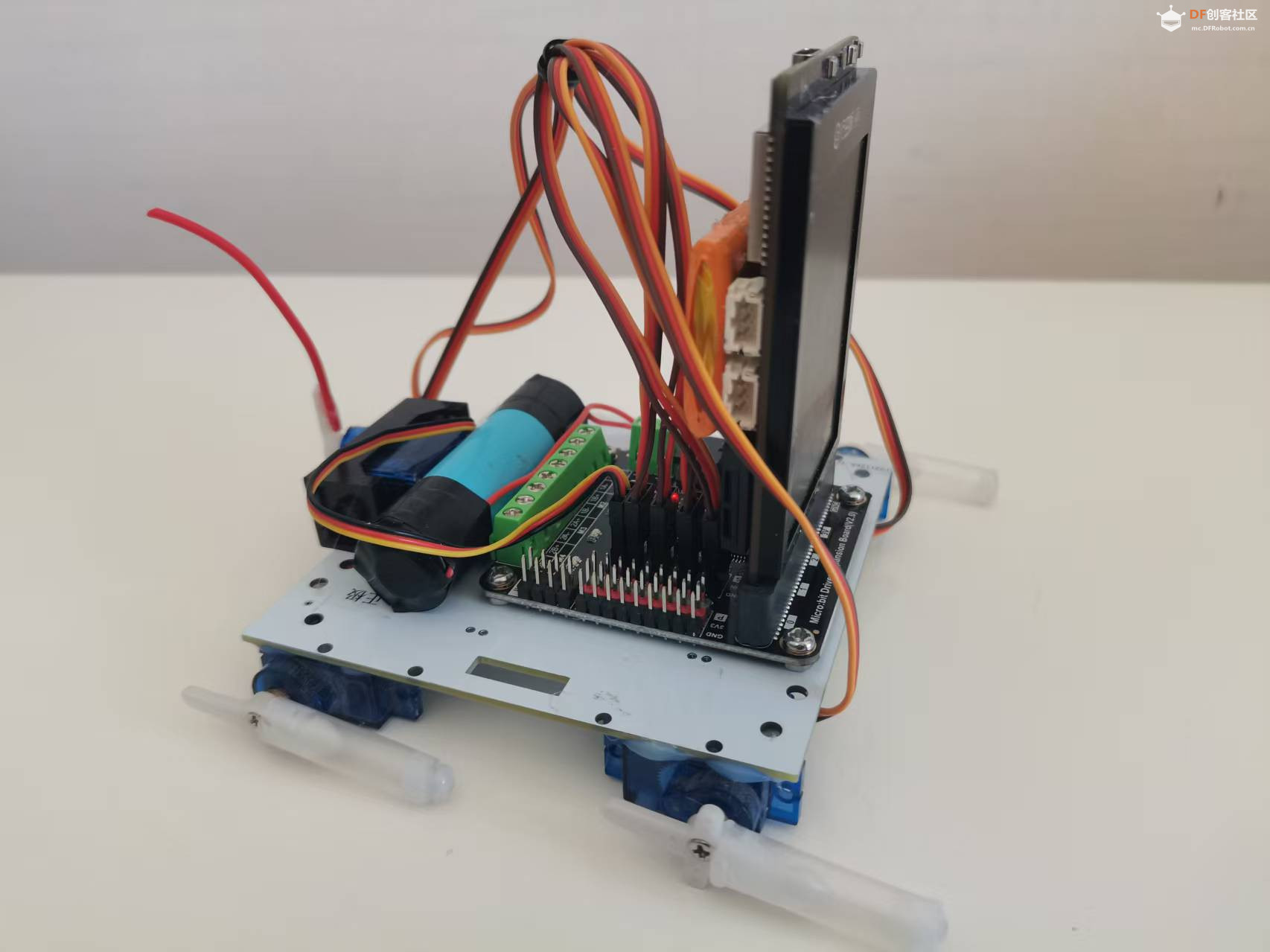
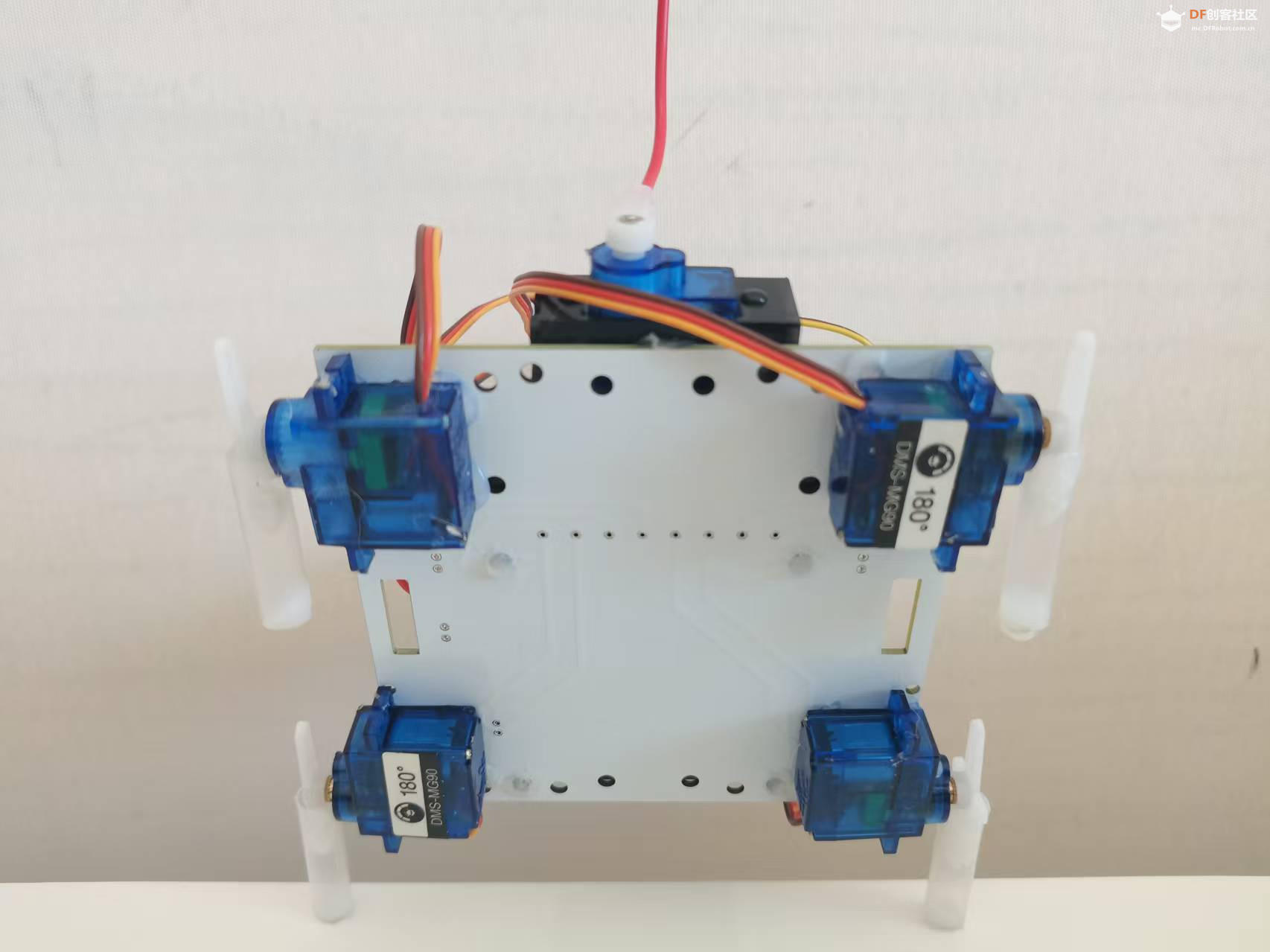
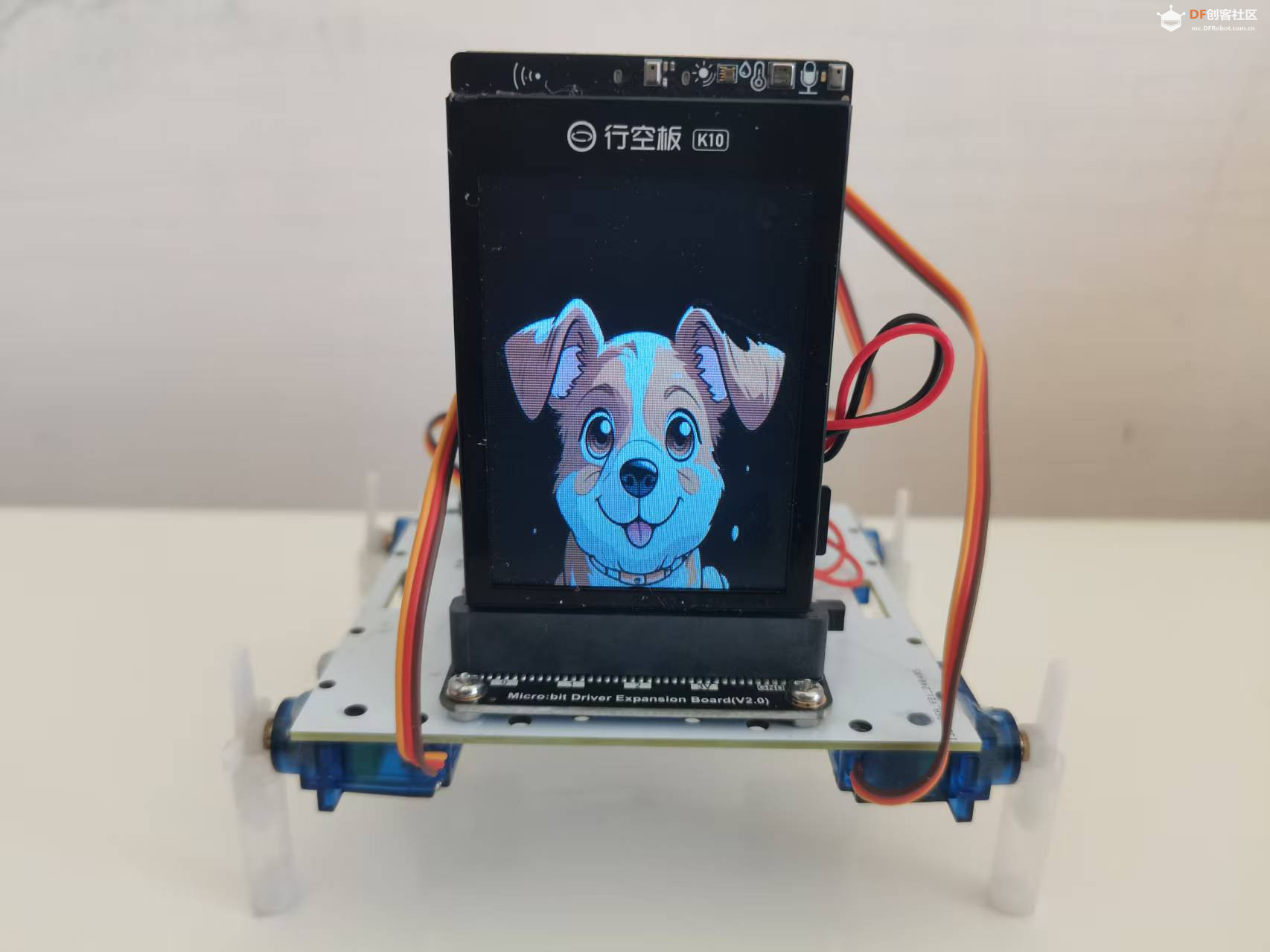
本帖最后由 云天 于 2025-2-7 14:39 编辑 项目来源 本次项目是基于《义务教育信息科技课程标准(2022年版)》和《义务教育信息科技课程教学指南》的要求,结合行空板 K10 的功能特性设计的。旨在通过制作电子宠物狗,让学生在实践中学习信息科技、人工智能相关知识,提升学生的编程能力和创造力。 项目介绍 本项目使用行空板 K10 作为核心控制板,结合五个 9g180 度舵机、四个控制脚、一个控制尾巴,制作一只电子宠物狗。学生可以通过语音指令控制电子宠物狗的各种动作,如站起来、坐下、趴下、招手、摇摆、前进、后退、左转、右转、停止、摆尾等。此外,电子宠物狗还具备 “讲个故事”“讲个笑话”“成语故事”“播放歌曲” 等功能,通过访问人工智能大模型 Kimi 实现。该项目所用材料简单,学生可以边学边制作。 硬件介绍
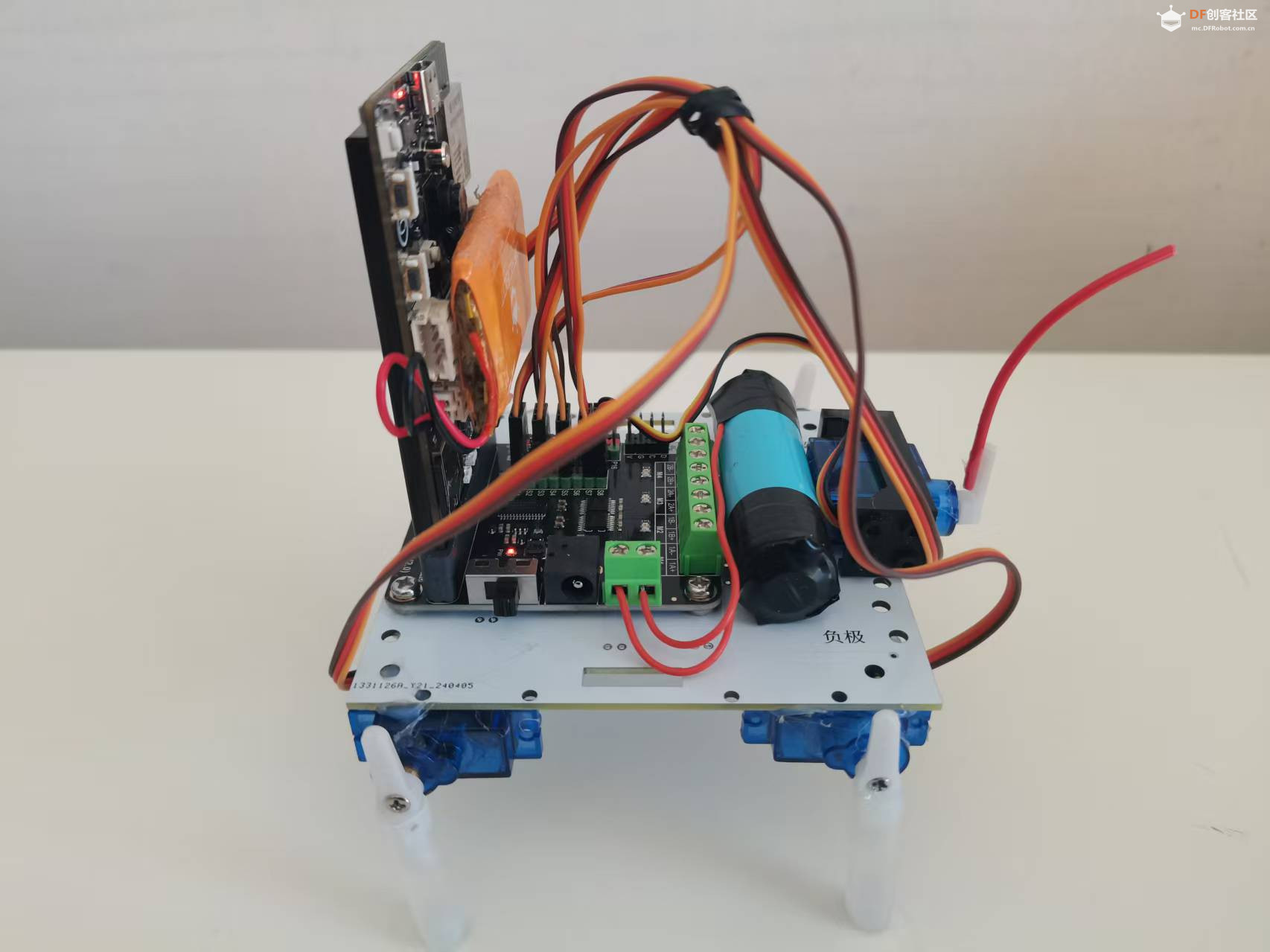 软件功能
 程序编写 1.程序示例  Kimi扩展 扩展包在附件中,通过“扩展”——“用户库”可加载。  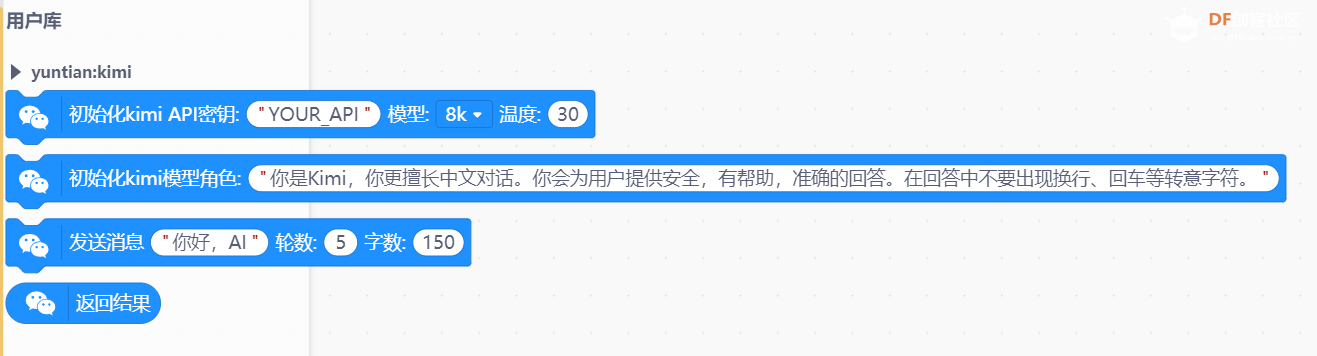 项目实施
     演示视频 通过本项目的学习和实践,学生不仅掌握了信息科技知识和编程技能,还培养了创新思维和实践能力。电子宠物狗的制作过程让学生了解了硬件连接和软件编程的基本方法,语音识别与控制功能让学生体验了人工智能技术的应用,故事与笑话、播放歌曲等功能则增加了项目的趣味性和实用性。 附件下载  K10-kimi-thirdex.rar K10-kimi-thirdex.rar |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创客造
创客造
 编辑选择奖
编辑选择奖
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






