|
2735| 20
|
[项目] 【Arduino 动手做】3D打印的机械臂 Remix |
|
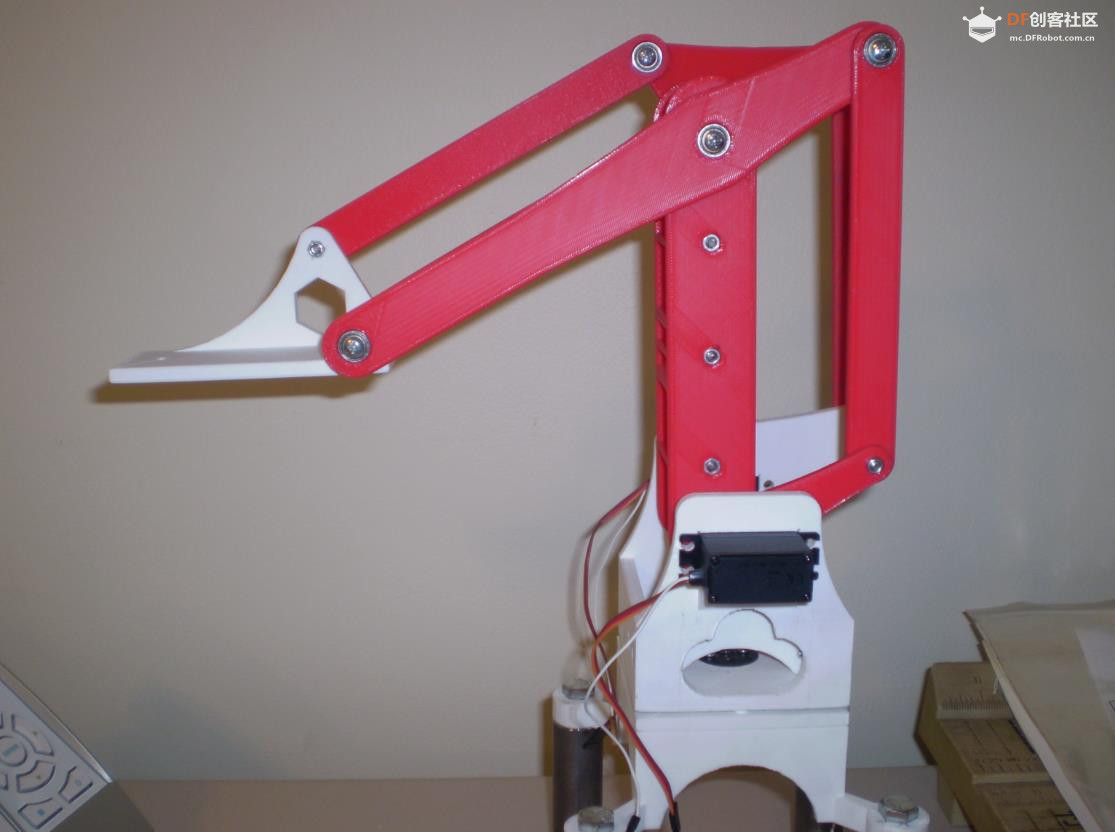
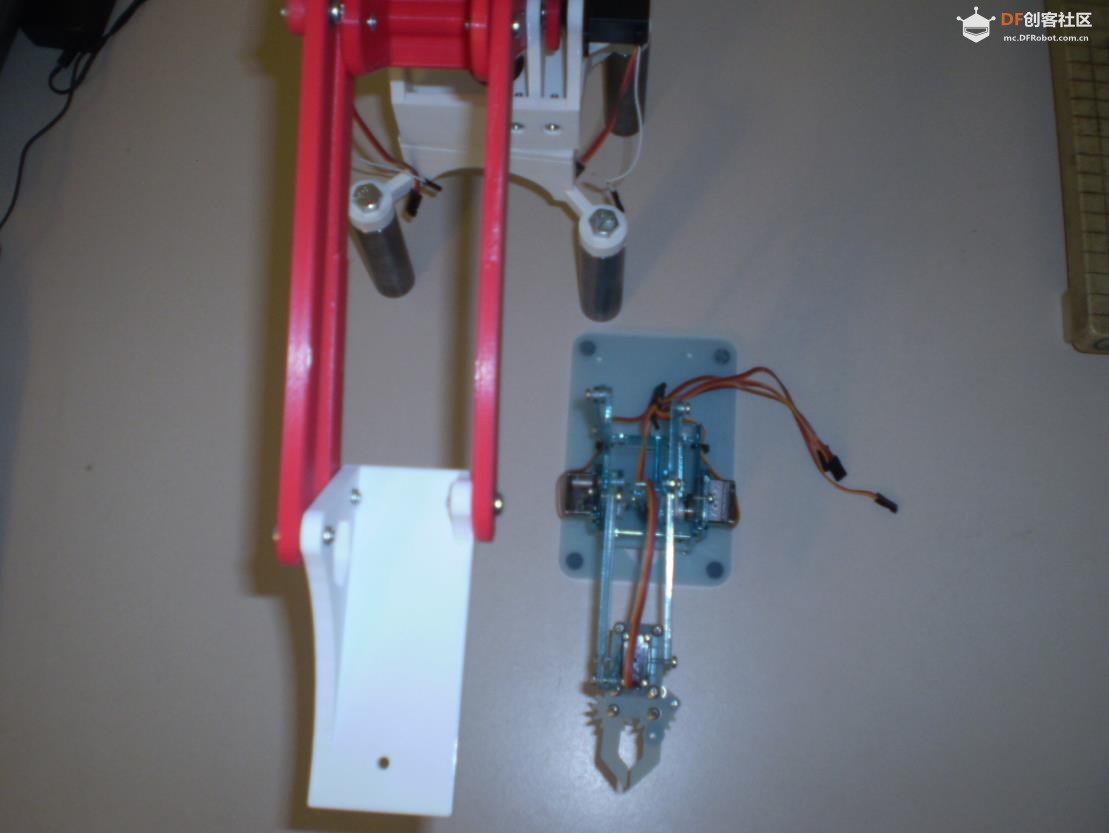
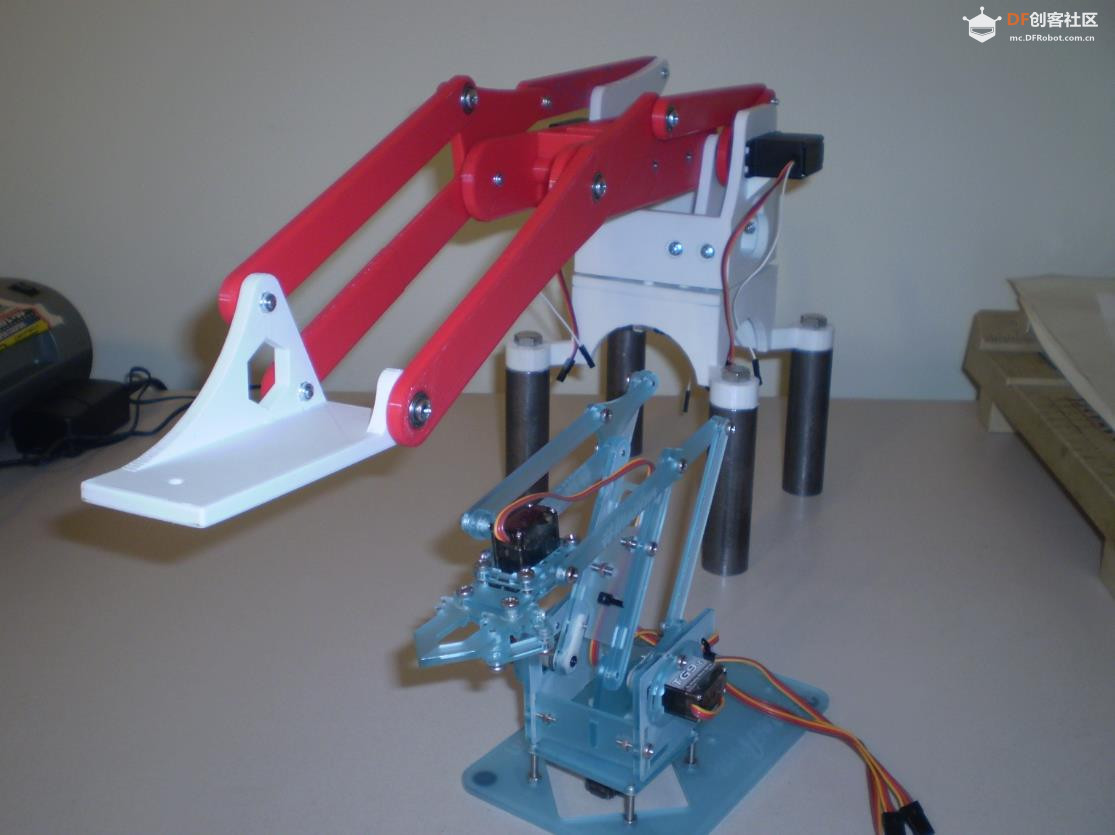
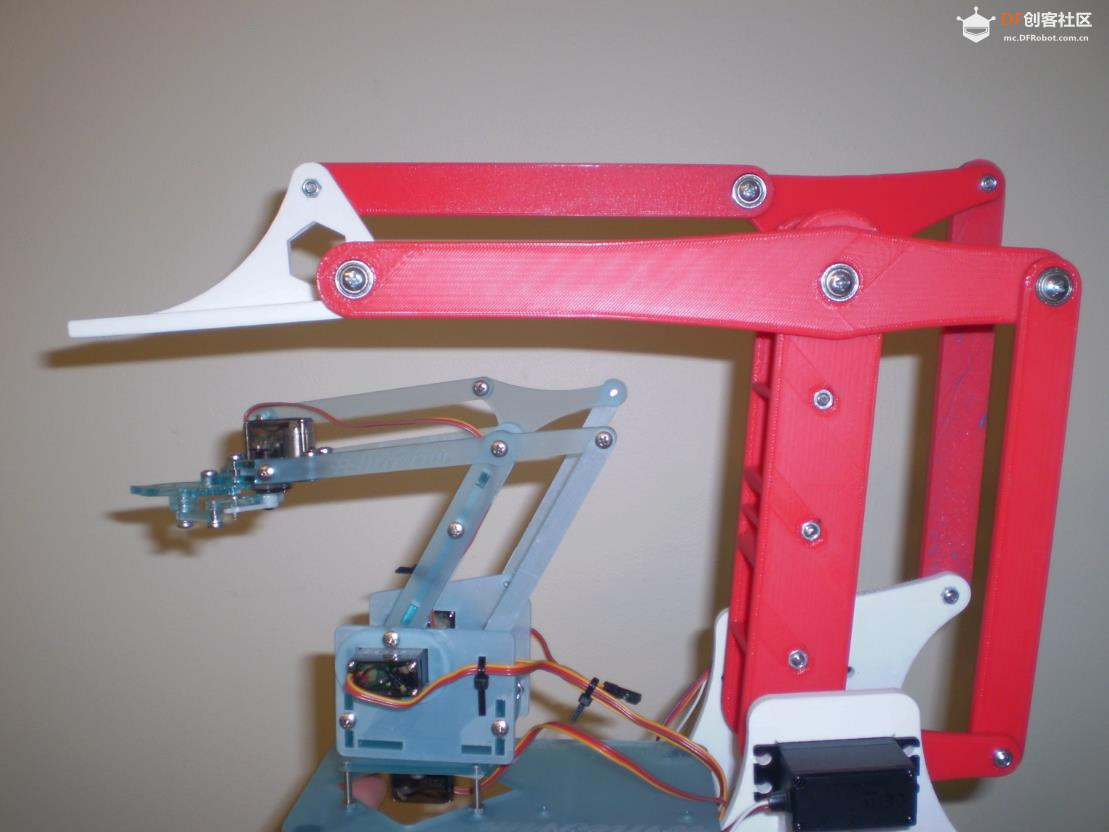
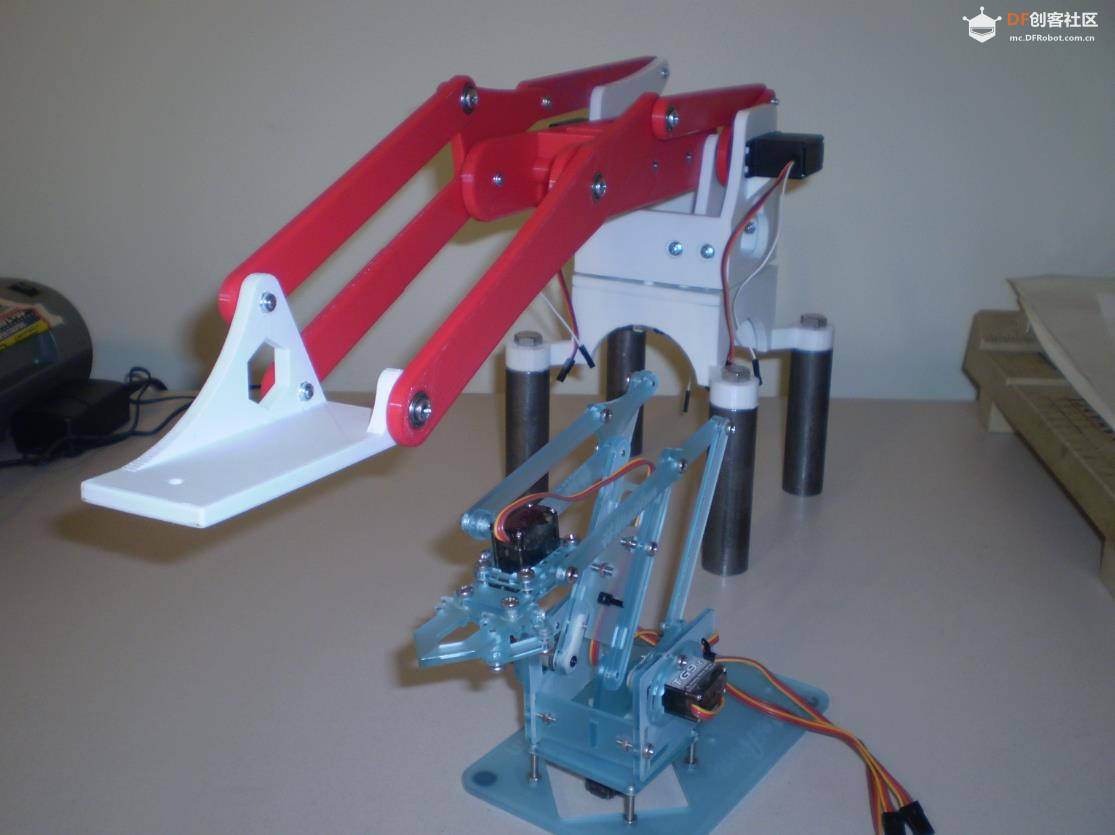
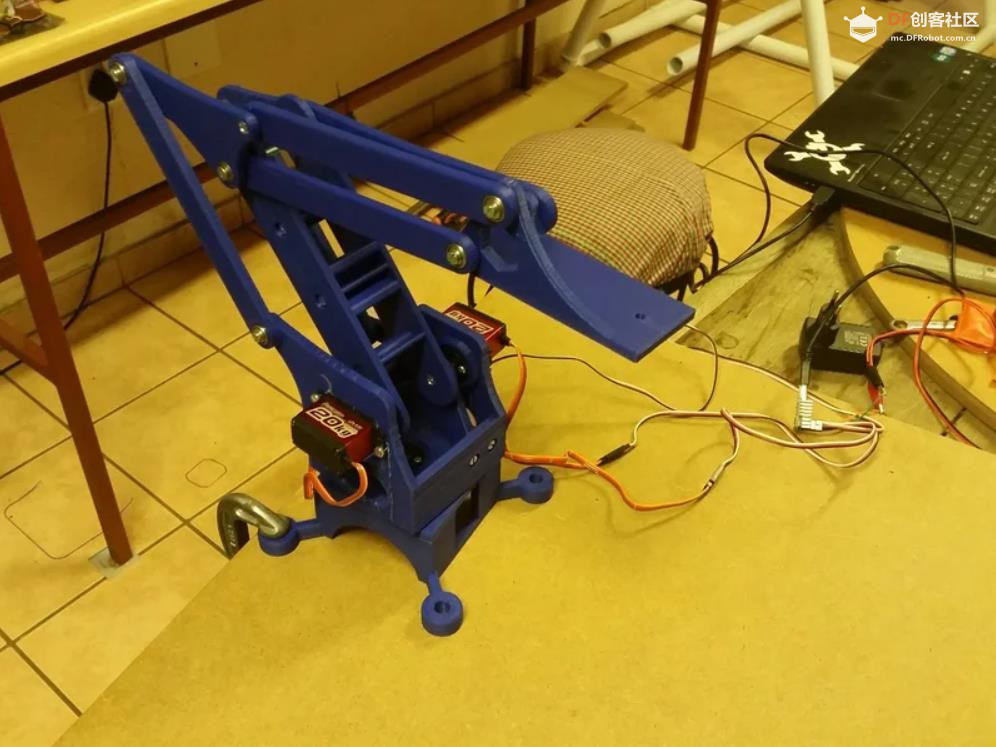
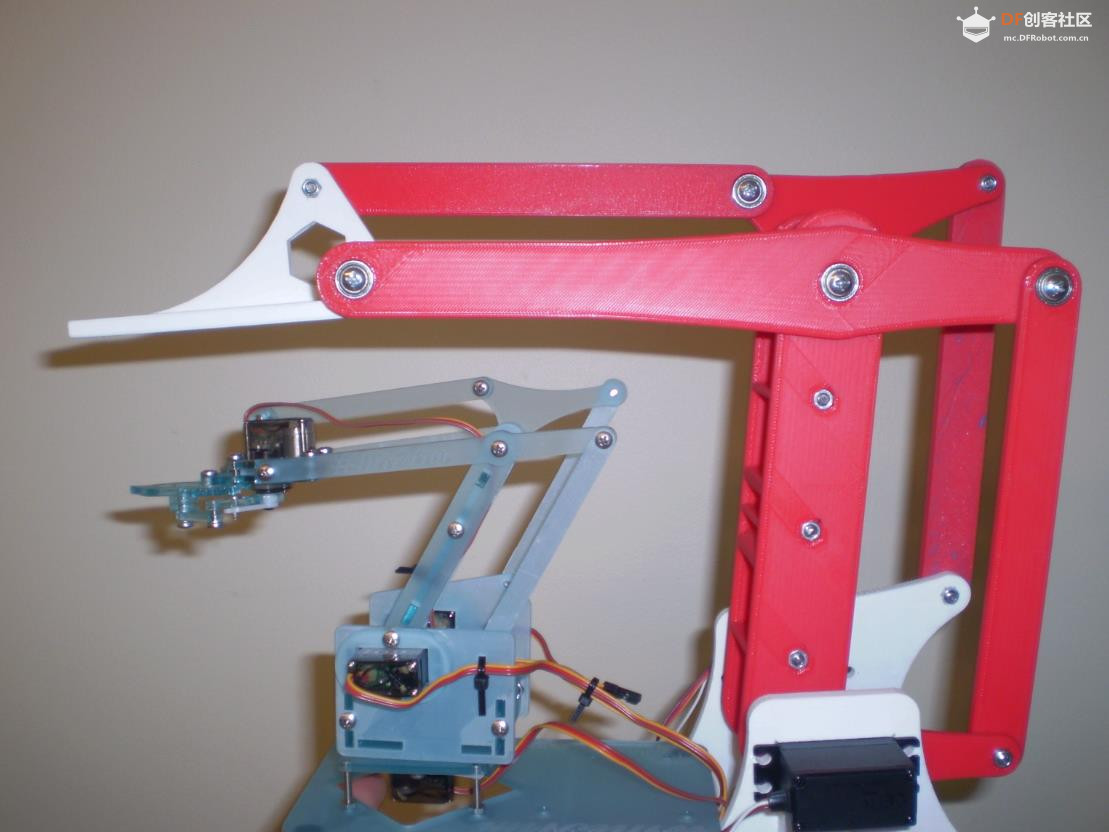
本帖最后由 驴友花雕 于 2025-6-5 06:13 编辑 我设计了一个更大、更强、更长的“meArm”机械臂版本。机器人手臂看起来很有趣,玩起来也更有趣。这种设计为您提供了构建自己的机器人手臂的额外好处。使用 3D 打印机和五金店的零件,我能够提高原始“meArm”套件的举重能力和力量。我添加了一些新功能来纠正我在原始套件中遇到的问题。 要查看原始的“meArm”,请在 Pocket-Sized-Robot-Arm-meArm-V04 上查看他的项目。我从 adafruit.com/products/2012 购买了他的套件,并享受了将其组装和试用的乐趣。我喜欢这个设计,它看起来像工厂里的机械臂。最初的“meArm”是一个很好的套件,但对于任何实际用途来说都有点弱。所以我启动 SketchUp 并预热 3d 打印机。是时候让它变得更大、更强、更长了!我将秤翻了一番,在关节上添加了轴承以抑制运动,并添加了更大的伺服系统来帮助移动较重的物体。我有一些问题需要克服,并且还有更多的改进想要做出,但我正在通往成功项目的道路上。 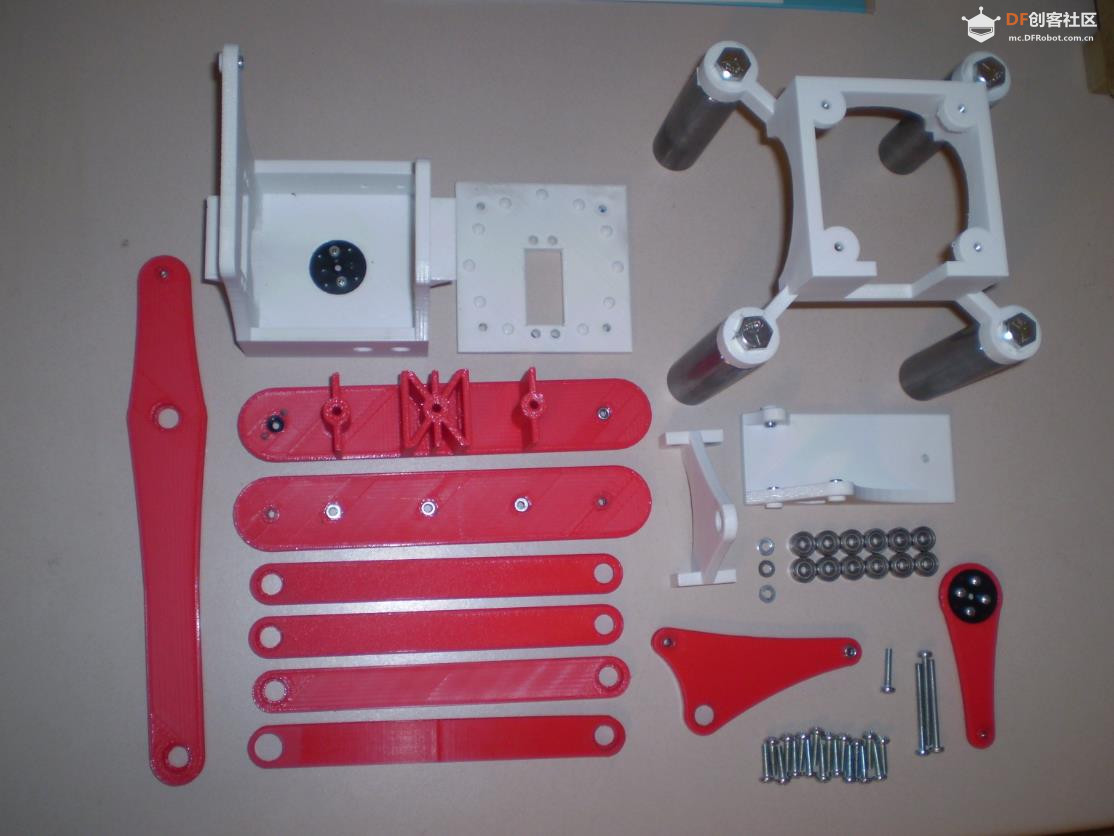  |
|
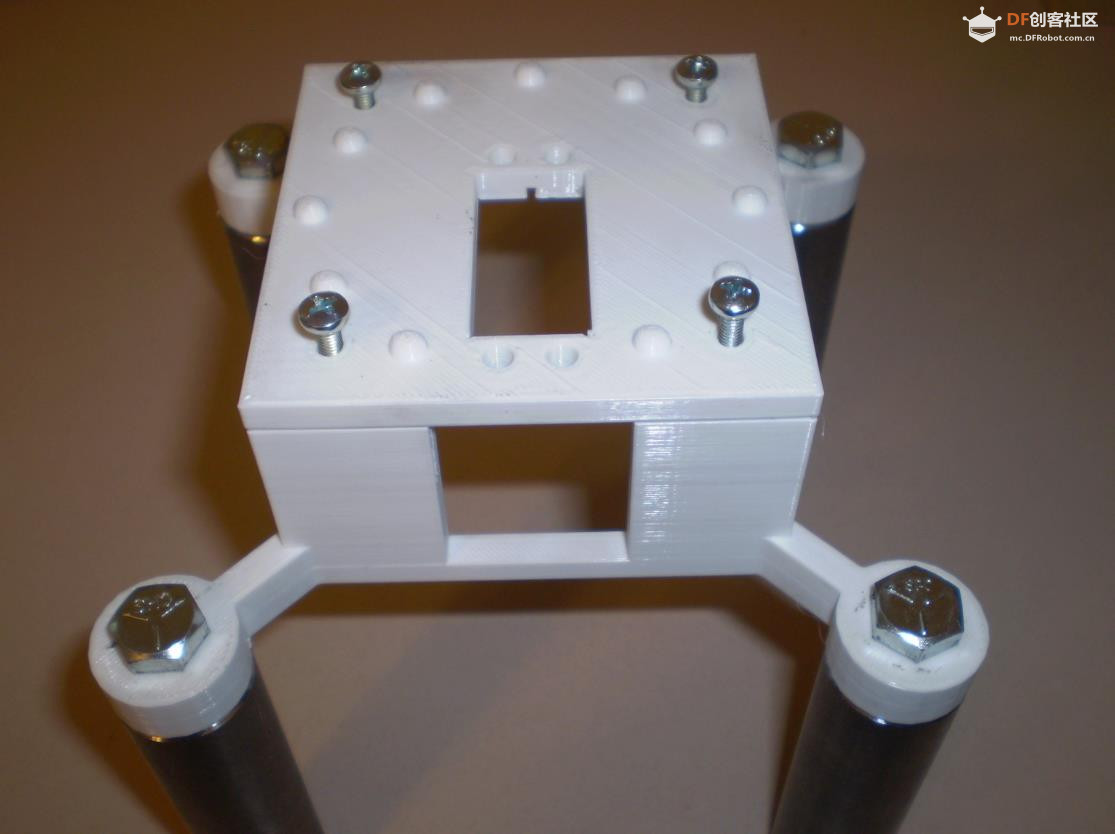
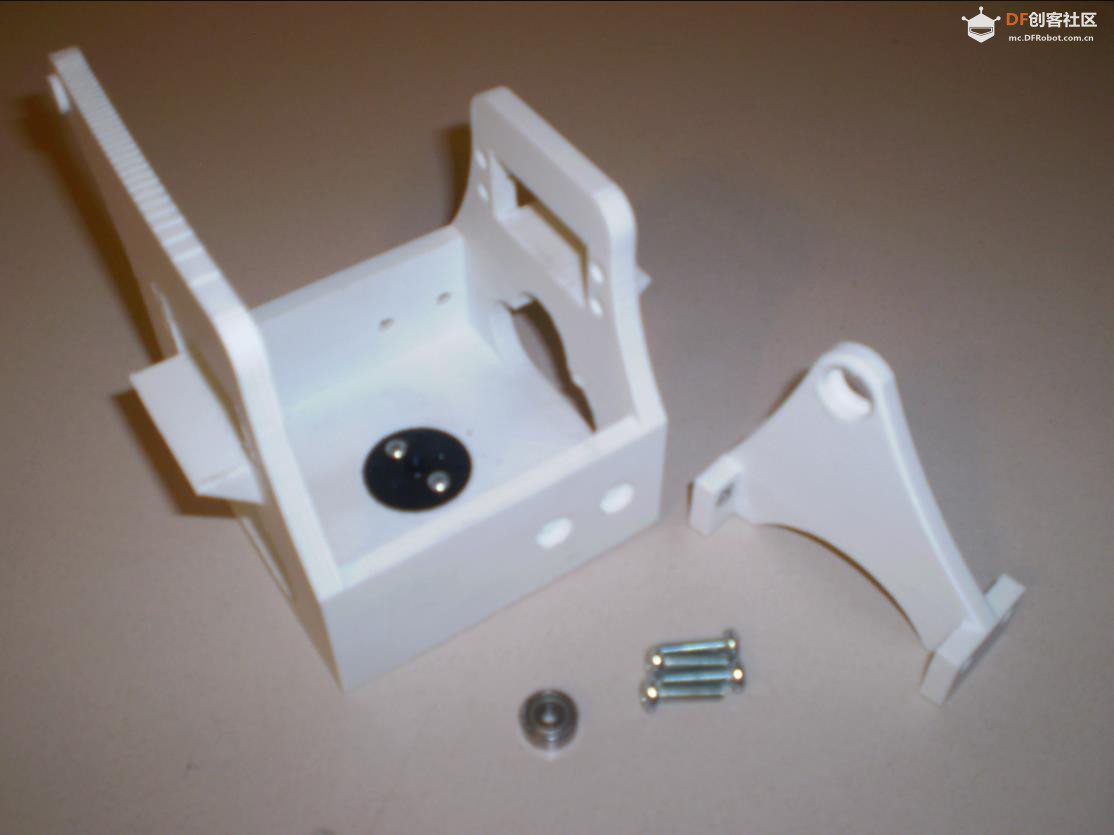
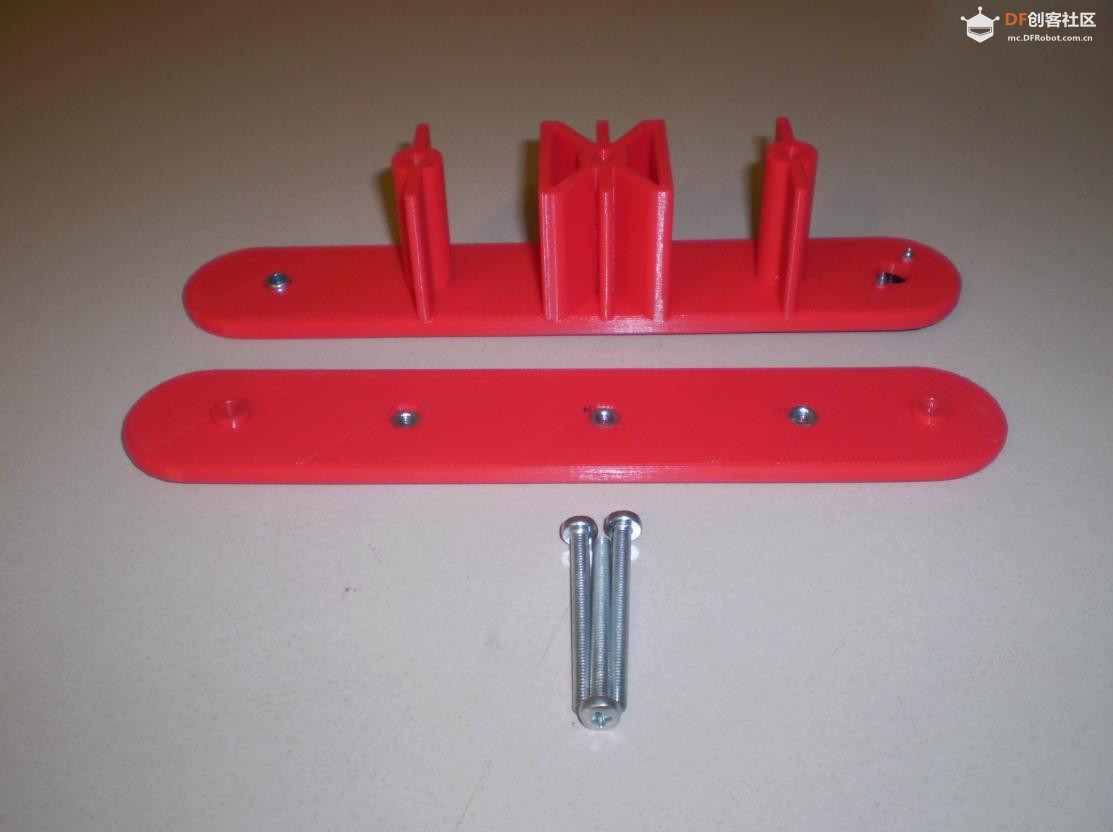
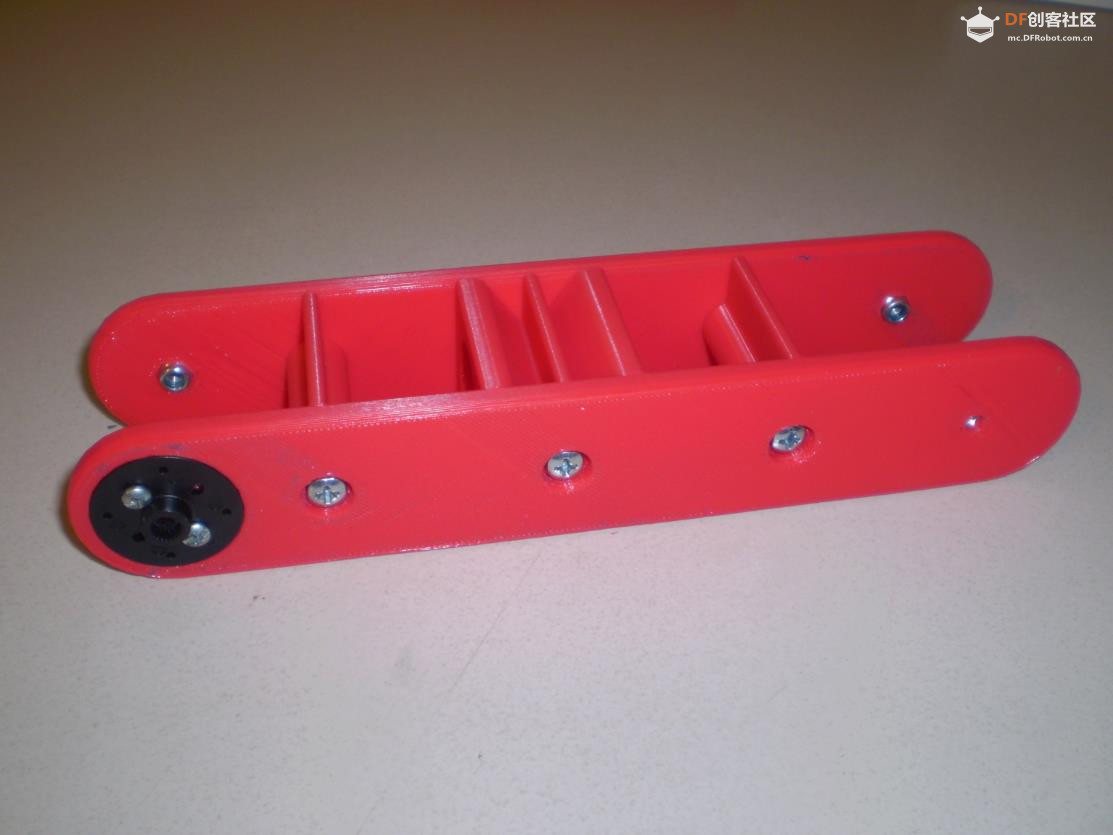
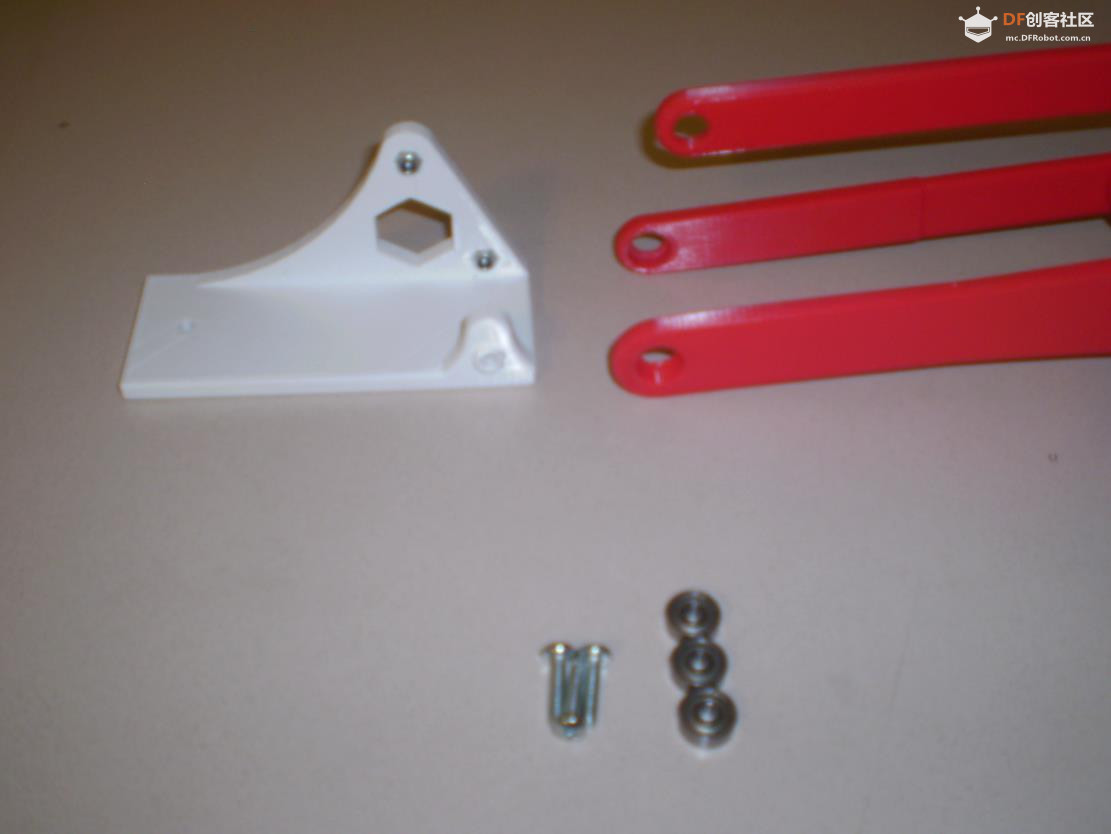
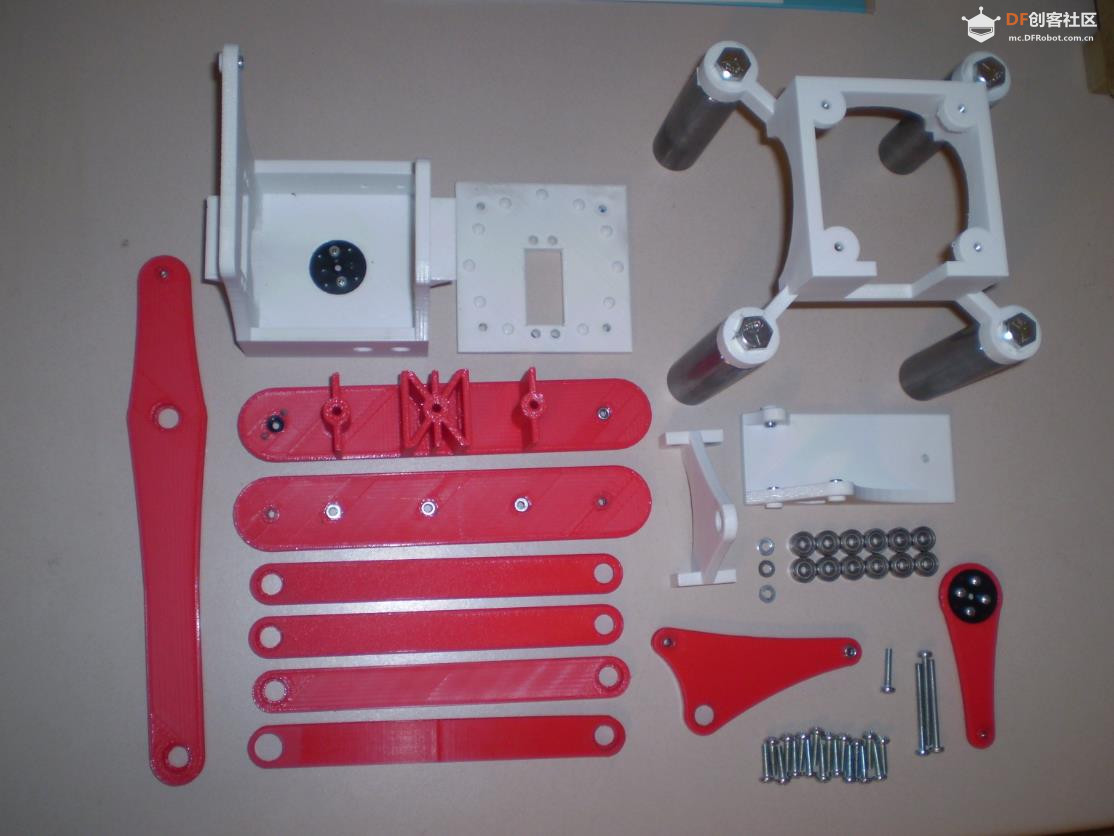
第 1 步:零件清单 1、硬件材料: 18 ~ 5/8“ 长 M4 螺丝 1 ~ 3/4“ 长 M4 螺丝 3 ~ 1-3/4“ 长 M4 螺丝 22 ~ M4 螺母(我用的是里面有尼龙的螺母) 3 ~ 小垫圈 12 ~ 轴承 624ZZ 13mm 外径 x 4mm 内径 amazon.com 12 ~ 伺服喇叭用小螺丝 2、3D 打印部件(附件下载): 基础件 巴塞中心支柱 中心梁 中梁顶部 抓取臂 抓握 长臂 伺服臂 短臂(两个) 站立 支架盖 支持臂 三支持件 3、工具: Pilips 螺丝刀 3D 打印机 研磨机(缩短一些螺丝) 4、电子学 3 ~ 伺服电机(如果你需要一个活动夹子,需要4个) 3 ~ 伺服延长线 1 ~ 微控制器 我使用了Arduino 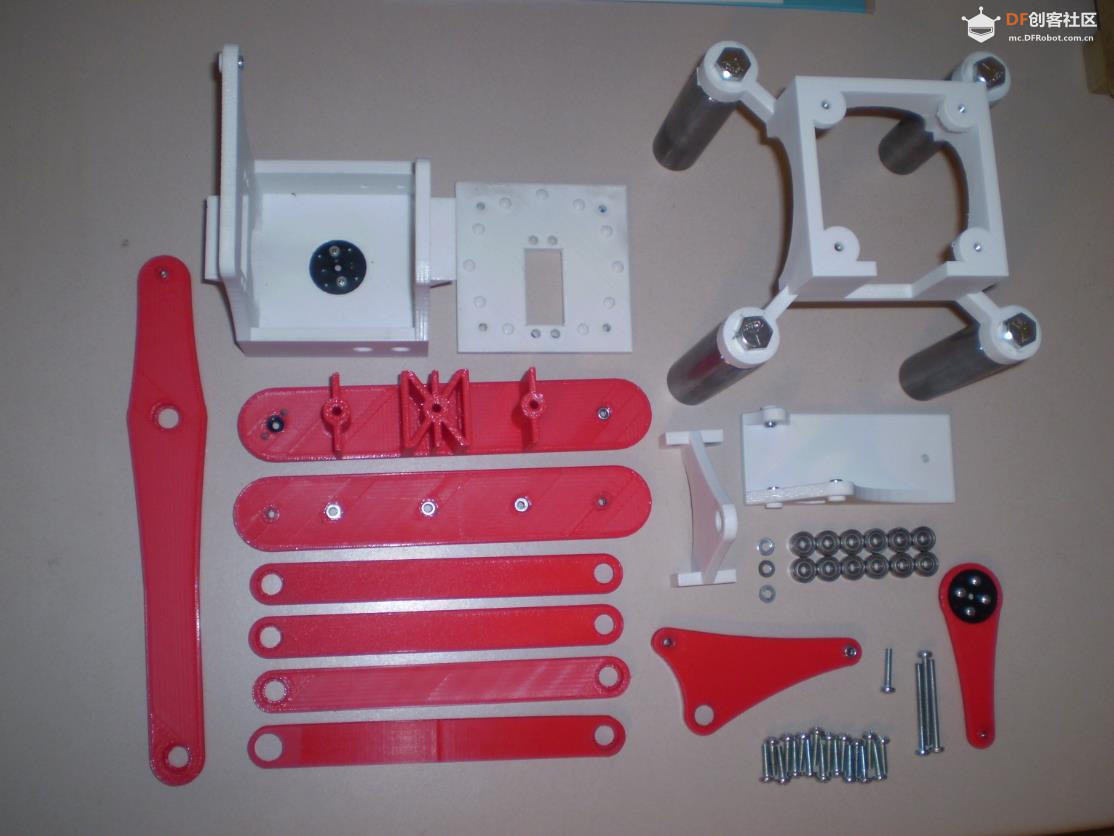  |
|
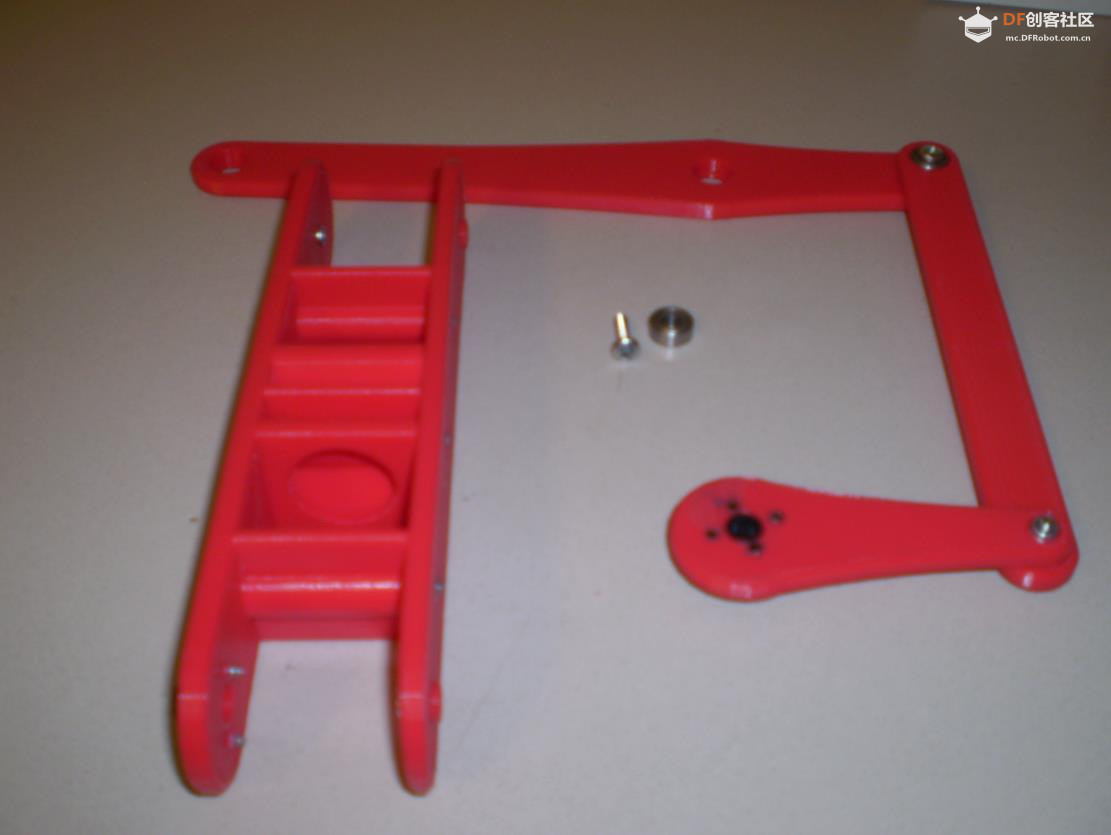
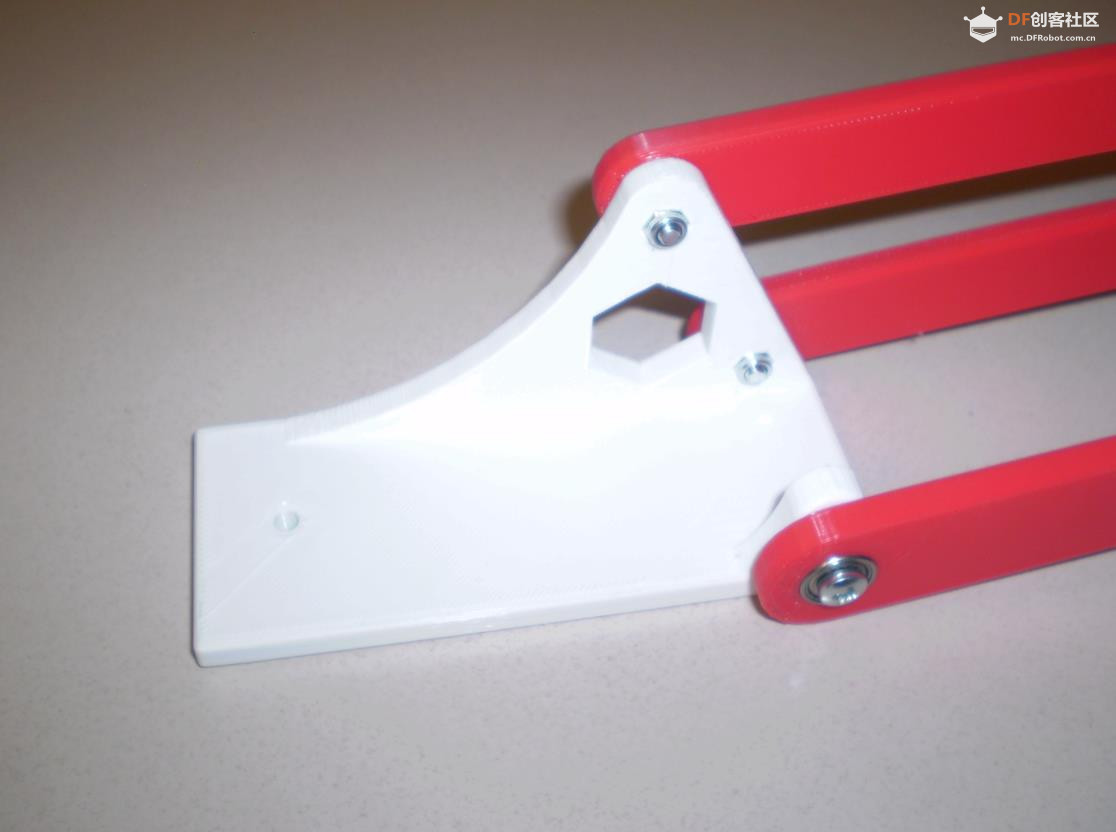
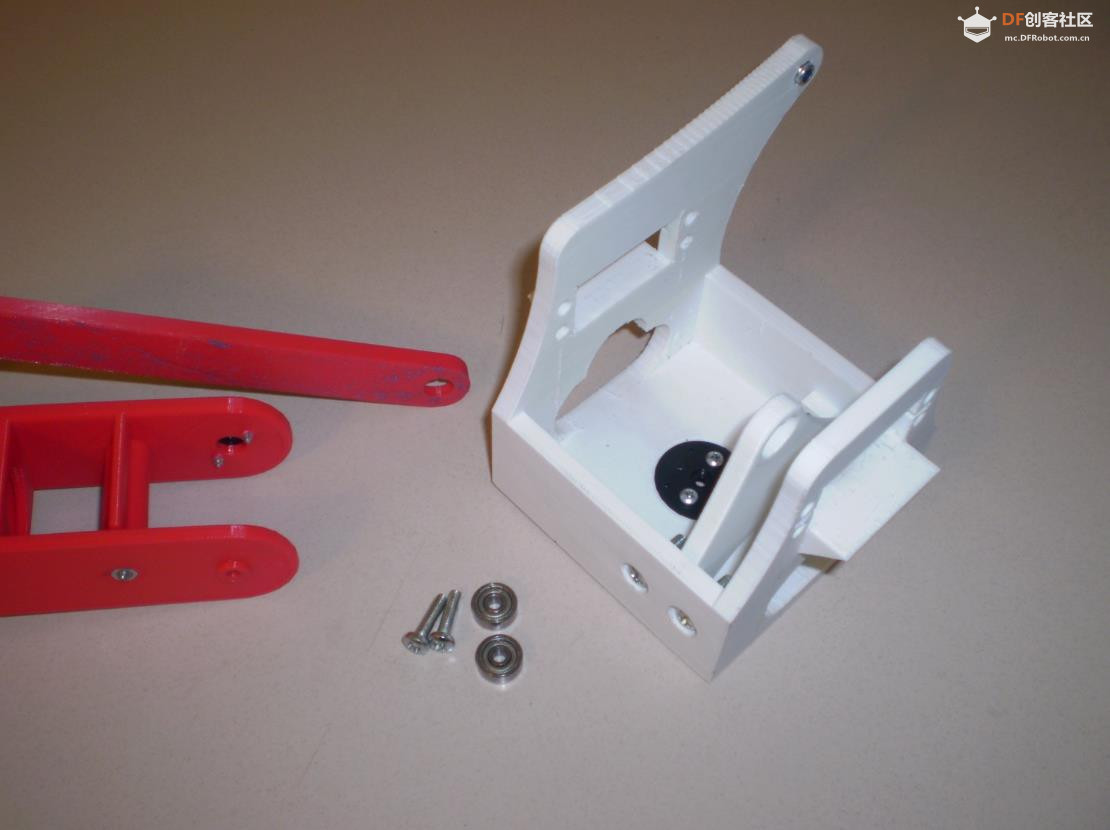
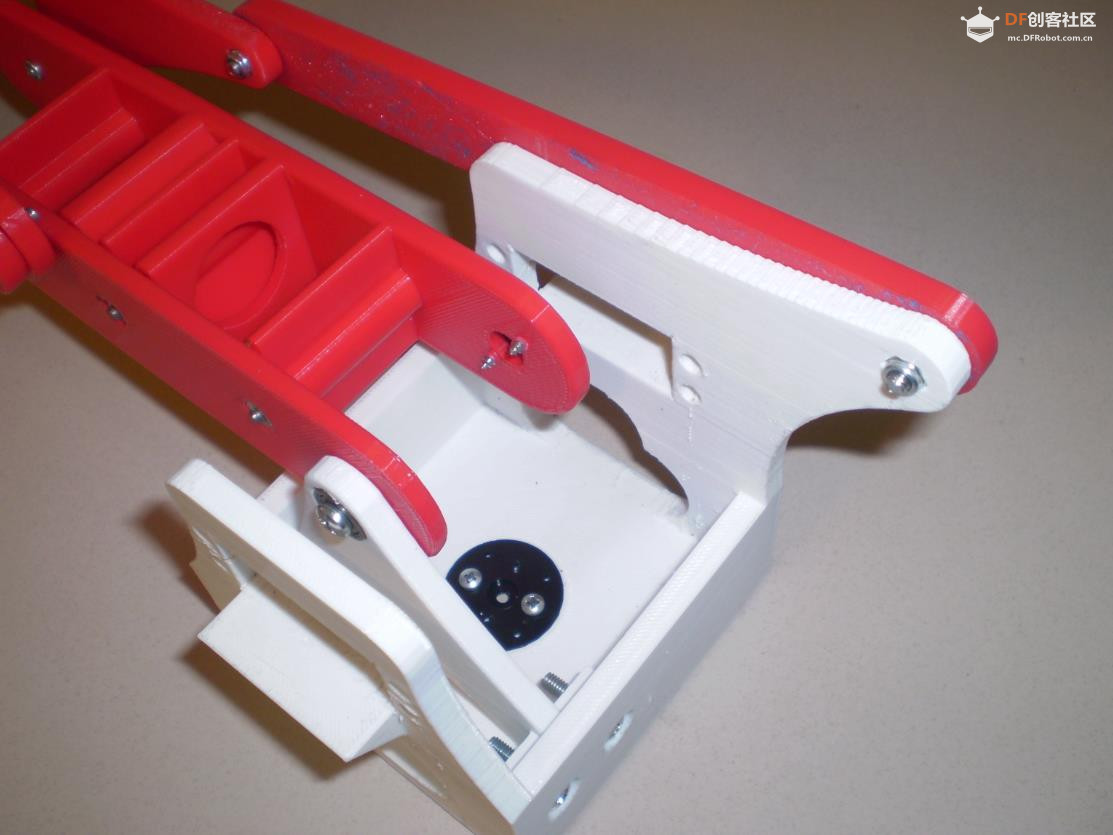
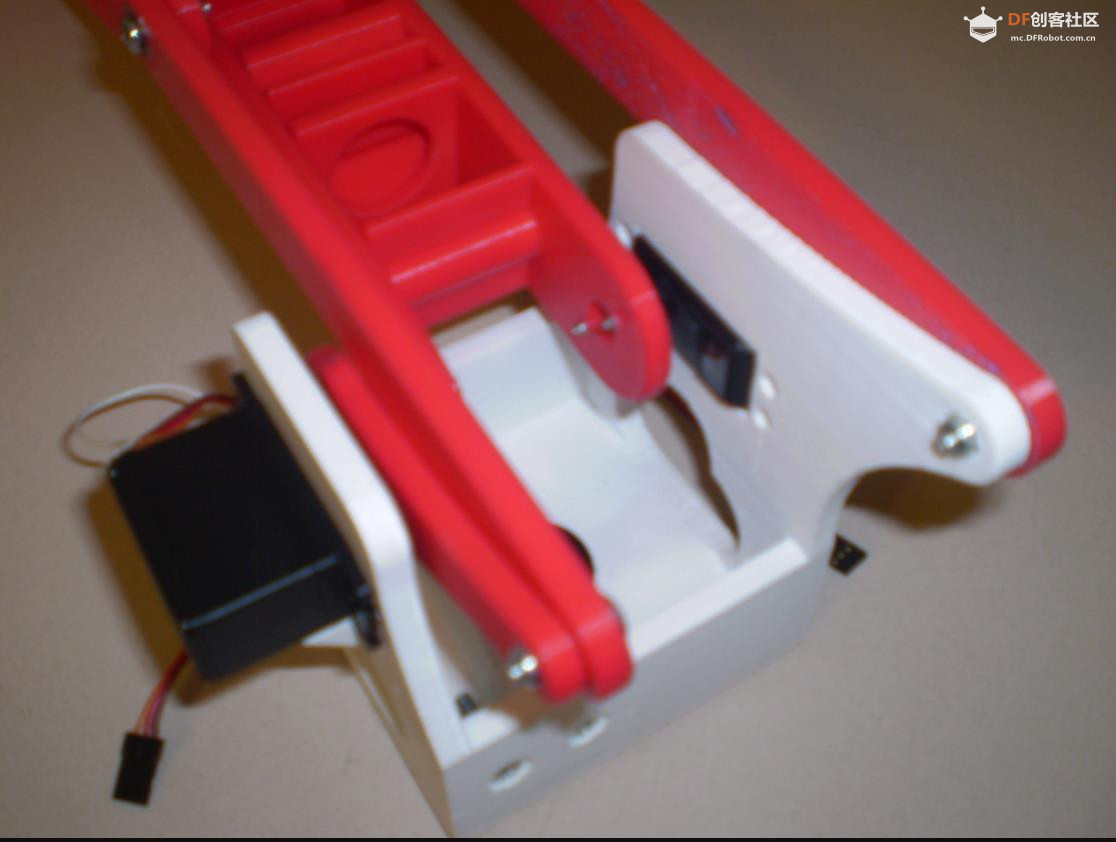
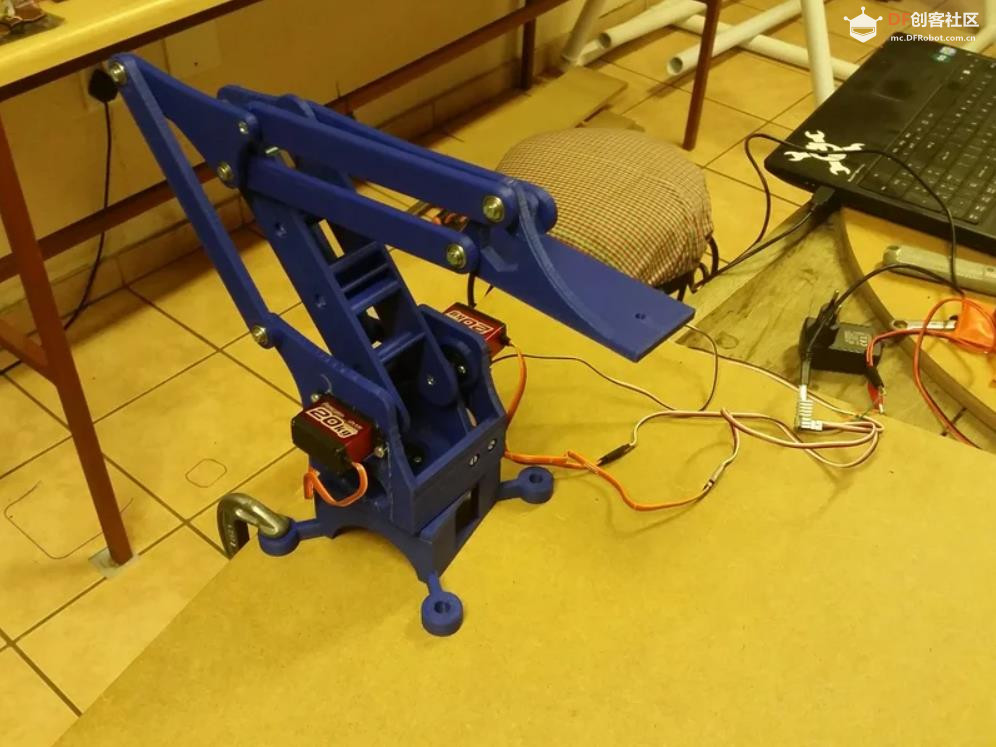
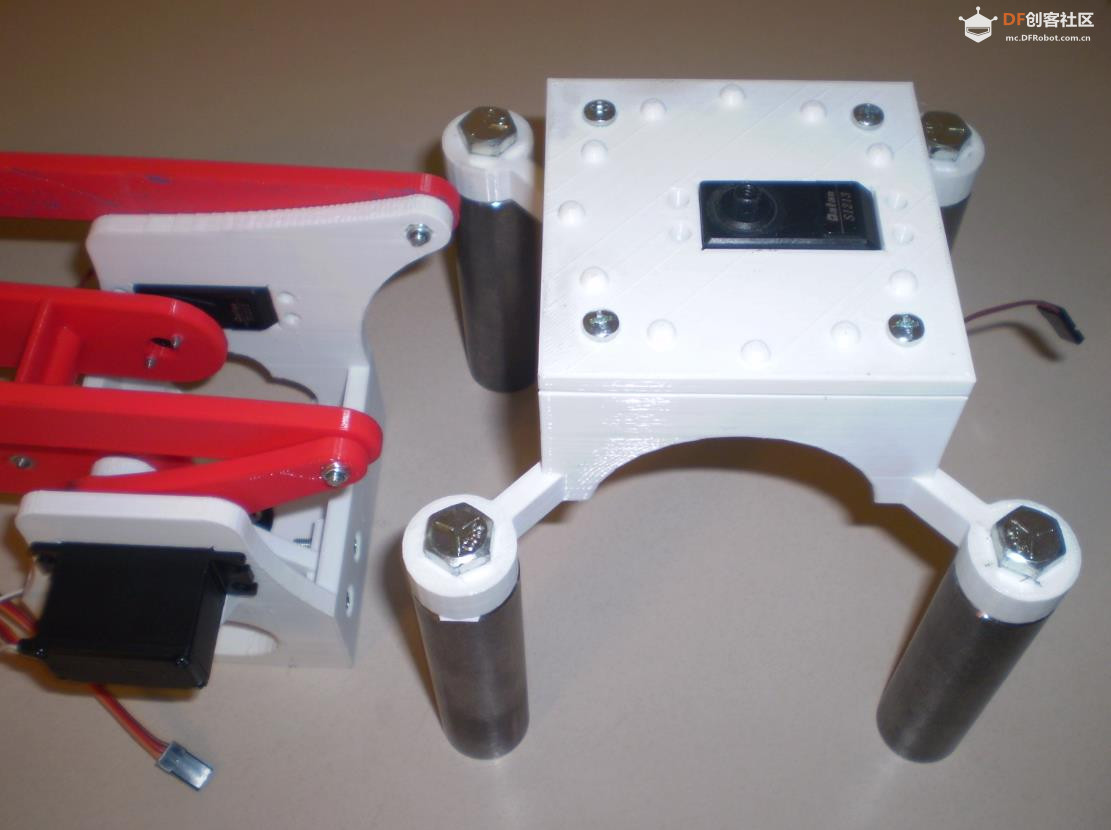
第 7 步:组装手臂(构建肩部) 这可能有点棘手,因为手臂看起来一样,但每个手臂都略有不同。您将需要三重支撑、一个短臂、支撑臂和抓手臂。夹持臂的一端稍薄。支撑臂在同一侧有两个轴承孔。将两个螺母压入三重支架中。然后使用轴承和螺钉将支撑臂连接到三重支架的长端。接下来,将短臂连接到三重支架上的另一个螺母中。抓手臂和三重支撑需要轴承。小心将夹持臂放在三重支架上的方式。如果将其倒置,则无法正确连接到夹头。另一端的轴承侧应朝下。使用 3/4 英寸长的螺钉,将垫圈放在三重支架和夹持臂上的两个轴承之间。这将在下一步中拧到中心梁上。    |
|
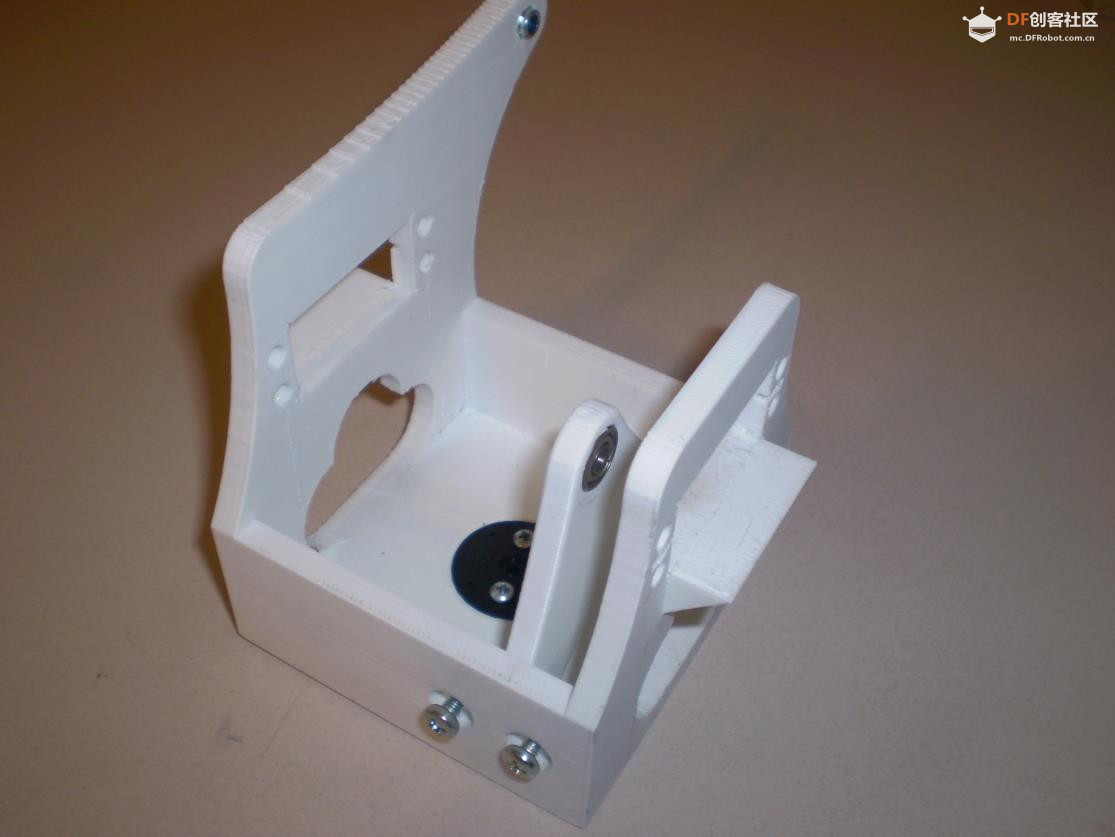
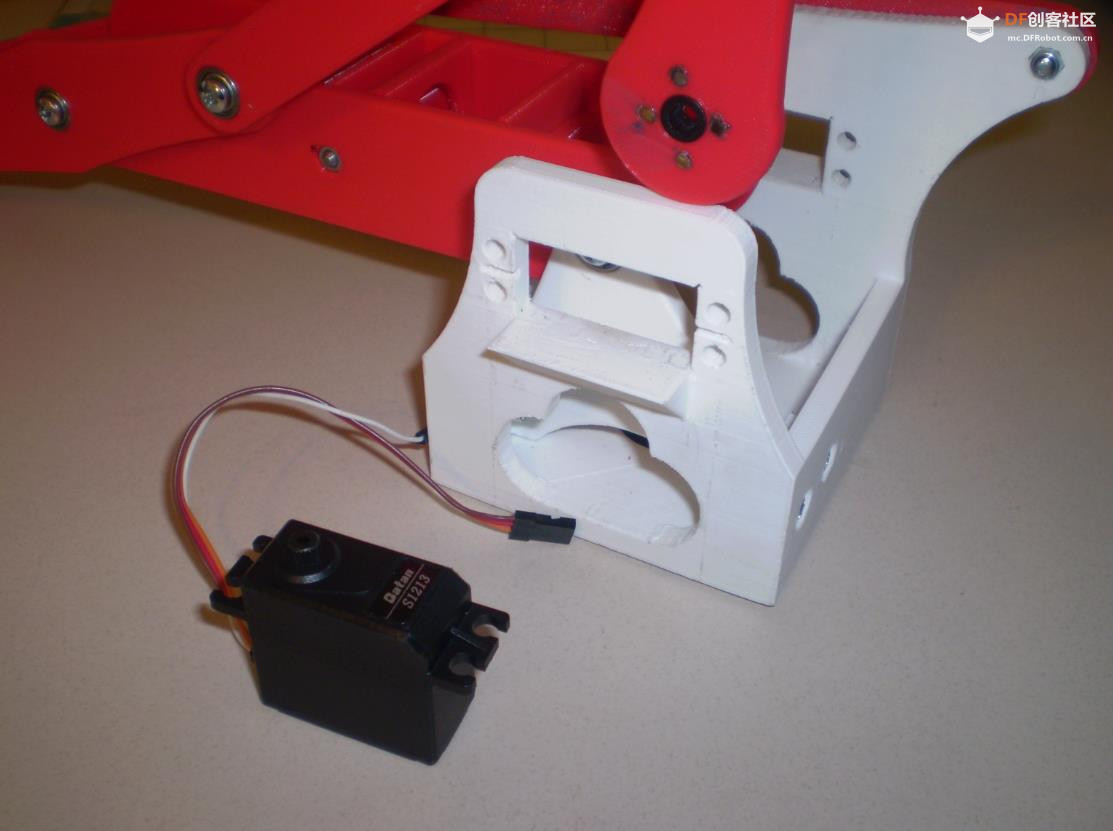
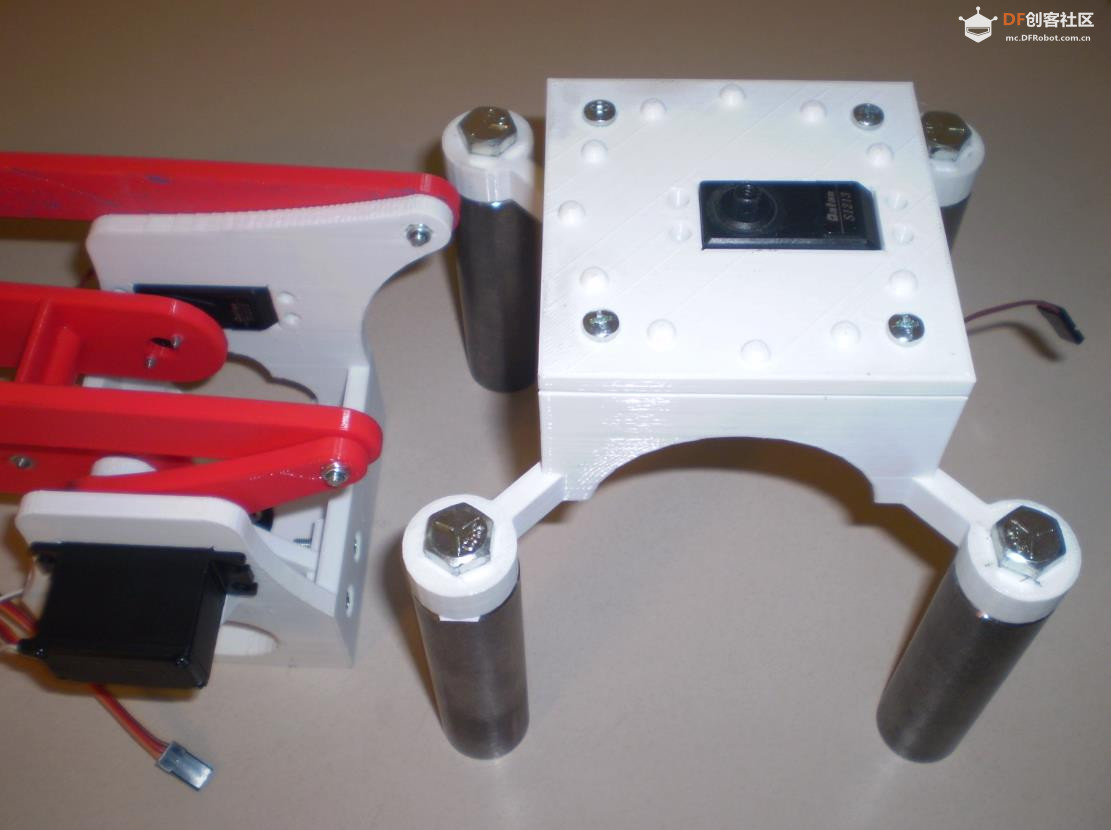
伺服故障: 我拍的舵机来自 adafruit.com,并且有一根额外的线用于位置反馈。我打算将它们用于学习臂(用手移动它,它会记录运动并回放)。但是舵机的强度不足以在完全伸展时移动手臂。所以我从我放在零件清单上的 polou.com 切换到了一些高扭矩的。他们还没有进来,所以我很高兴看到他们会怎么做。权衡是他们没有反馈,所以对我来说没有学习手臂。我想如果我从中心梁上去除一些塑料,原来的伺服系统可能会工作。 如果我构建另一个,我会做出更改: 底座限制了总行程,因此我会去掉正面和背面。 更新所有零件的半径,使其匹配(外观) 可互换的夹头,用于固定不同的夹持器 模型中内置的 Wire 管理 看台上更强壮的支腿 LED 只是因为 通过添加孔(三角形)减轻所有部件的重量 某种电线保持器,以防止电线在旋转时扭曲 我认为使用带齿轮的步进电机可以增加承重能力并在底座上提供 360 度旋转。(我不知道这可能是个坏主意) 还有更多小的变化我还没有发现。  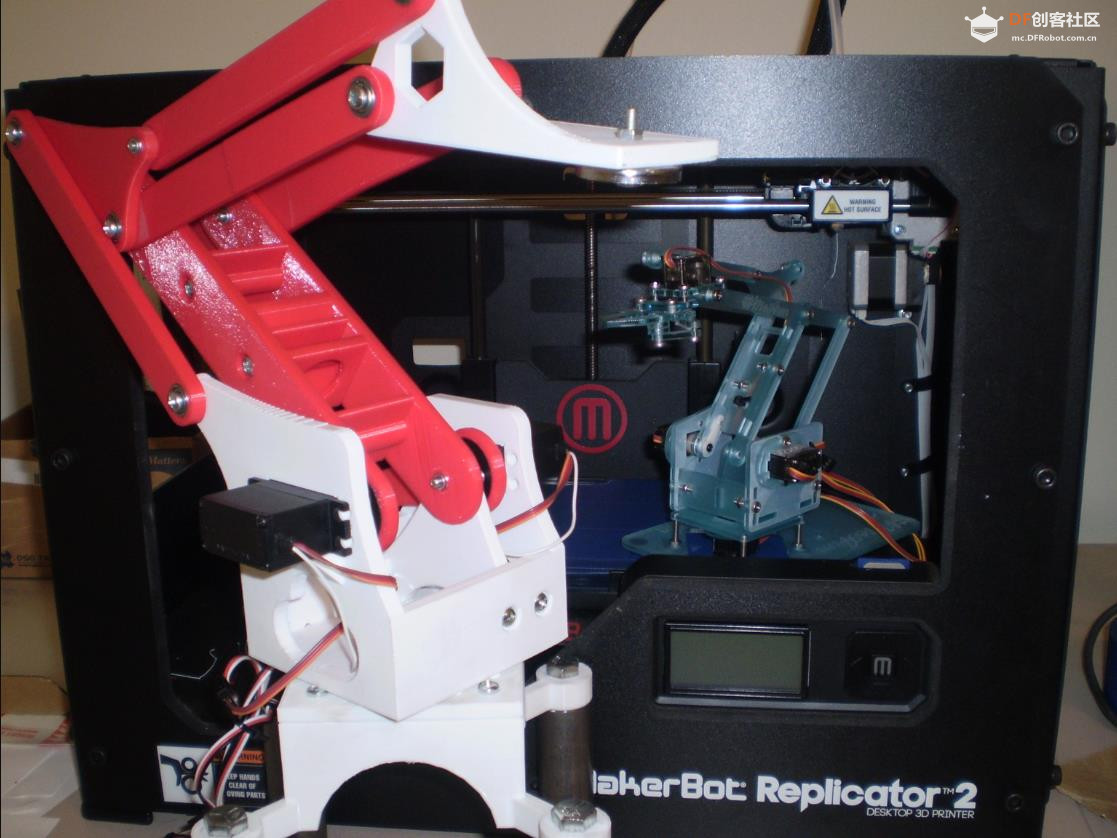 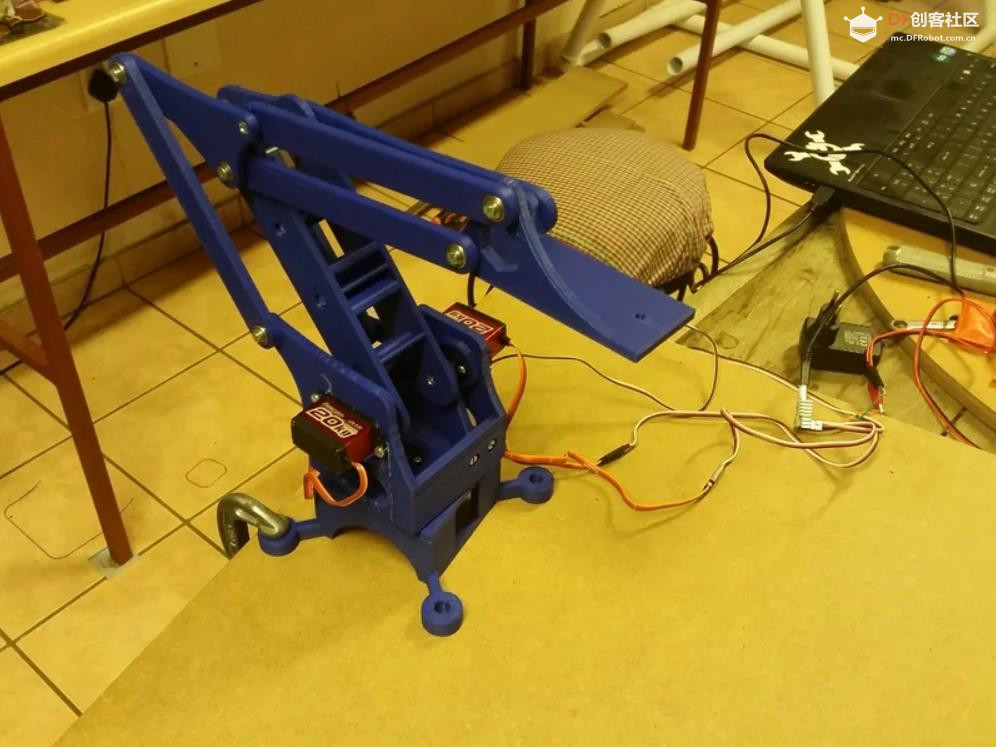    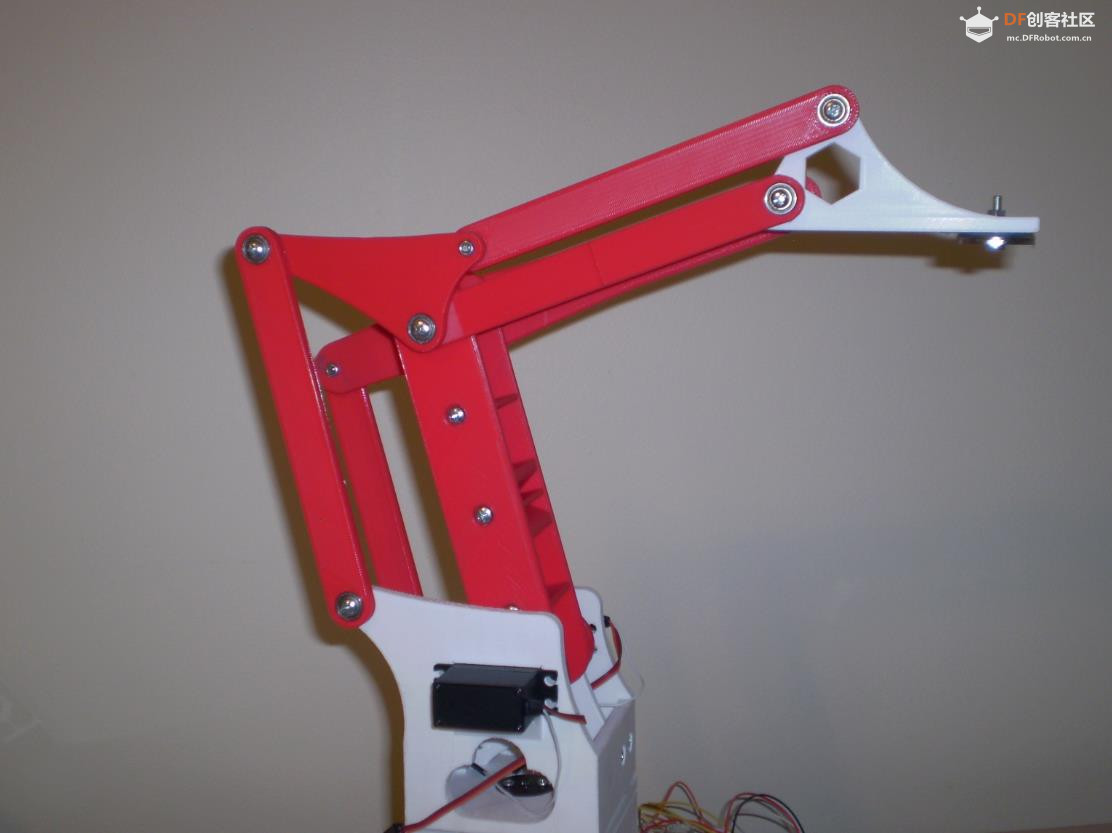 |
项目开源代码 |
|
MeArm Arduino MeArm Robotics 的逆向运动学控制库 MeArm with Arduino。 MeArm 有四个迷你舵机 - 一个用于爪子,一个用于旋转底座、肩关节和肘关节。但是,当你对将爪子放置在正常笛卡尔 (x, y, z) 坐标中的位置更感兴趣时,用伺服角度指定事物并不是很方便。 该库解决了发送到伺服系统所需的角度,以满足给定位置,从而使编码变得更加简单。 坐标以毫米为单位从底座旋转中心开始测量。初始“起始”位置位于 (0, 100, 50),即底座前方 100 毫米,离地 50 毫米。 此库存在各种其他版本: 带有 Adafruit PWM 驱动板的 Arduino 带有 Adafruit PWM 驱动板的 Raspberry Pi Beaglebone 黑色 MeArm 使用逆运动学移动 用法 包括三个使用示例: IKTest 遵循以笛卡尔坐标定义的预编程路径 JoystickIK 使用两个模拟拇指摇杆在笛卡尔空间中引导爪子 MeArm_Wii_Classic 使用通过 I2C 连接的 Wii Classic 游戏手柄来引导爪子 安装 将此存储库克隆到本地计算机,并将其作为“MeArm”放在 Arduino 库文件夹中。 MeArm 对象的类方法 void begin(int pinBase, int pinShoulder, int pinElbow, int pinClaw) - 用于驱动舵机的四个支持 PWM 的引脚。在对 MeArm 实例进行任何其他调用之前,必须在 setup() 中调用 Begin。 void openClaw() - 打开爪子,放开它手里的任何东西 void closeClaw() - 关闭爪子,可能会在这样做时抓住并持有某物 void moveToXYZ(float x, float y, float z) - 从当前点沿直线移动到请求的位置 void snapToXYZ(float x, float y, float z) - 将伺服角度设置为立即到达请求的点,而不关心手臂摆动通过什么路径到达那里 - 比 moveTo 更快但更难预测 void moveTo(float theta, float r, float z) - 从当前点沿直线移动到圆柱形极坐标中请求的位置 void snapTo(float theta, float r, float z) - 将伺服角度设置为立即到达请求点,而不关心机械臂摆动通过什么路径到达那里 - 比圆柱形极坐标中的 moveTo 更快但更难预测 bool isReachable() - 如果机械臂理论上可以到达该点,则返回 true float getX() - 当前 x 坐标 float getY() - 当前 y 坐标 float getZ() - 当前 z 坐标 void end() - 禁用所有伺服电机。如果以后想再次继续使用 MeArm,请再次调用 begin()。 |
|
本帖最后由 驴友花雕 于 2025-5-23 17:41 编辑 附录: 项目链接:https://www.instructables.com/My-meArm-Bigger-Stronger-Longer/ 项目作者:Jazzmyn (爵士明) 3D打印文件:https://www.thingiverse.com/thing:499654 开源代码:https://github.com/phenoptix/meArm-1/tree/master |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶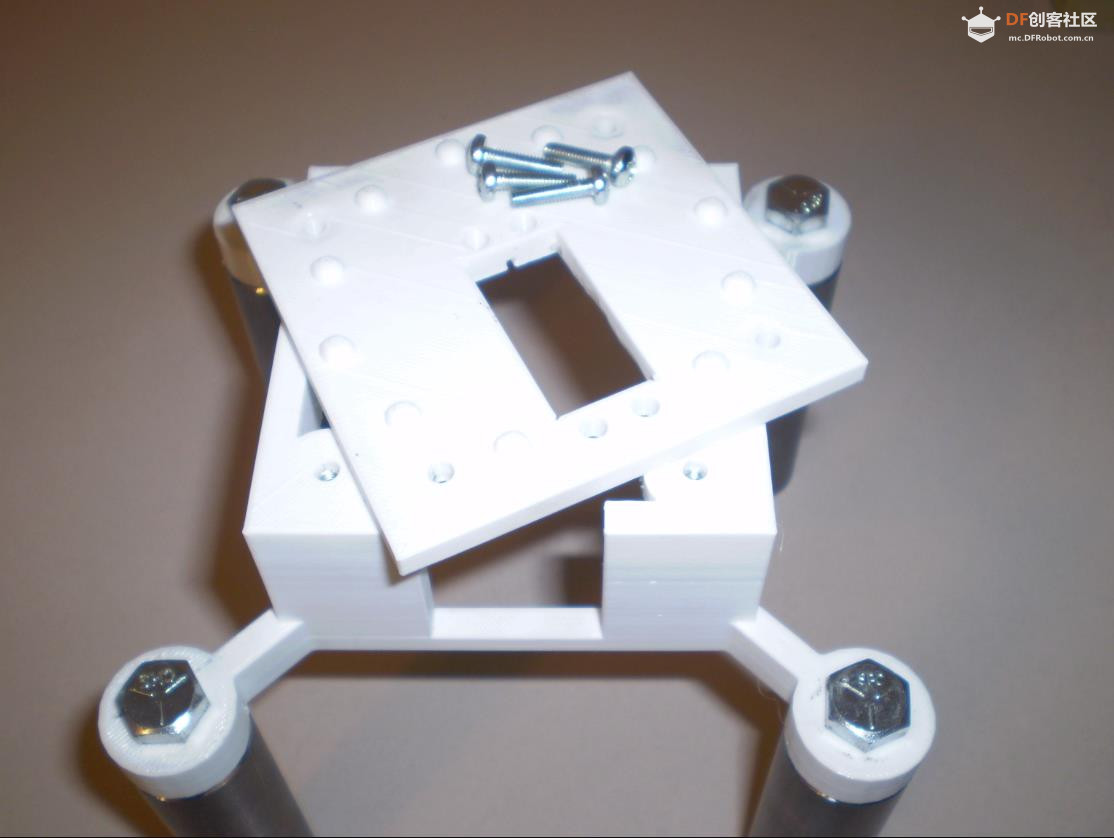









 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






