|
1943| 8
|
[项目] 【Arduino 动手做】 使用 MPU6050 构建自己的自平衡机器人 |
|
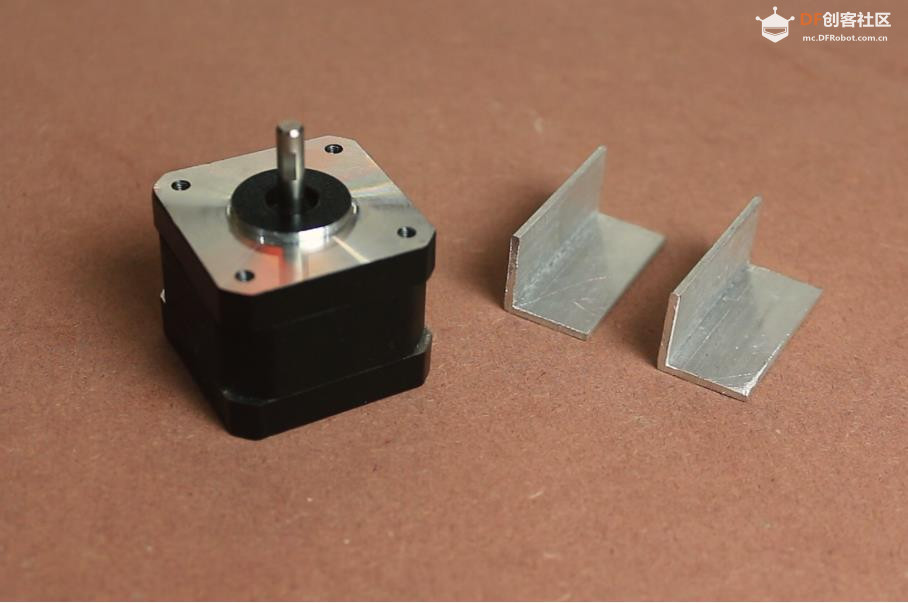
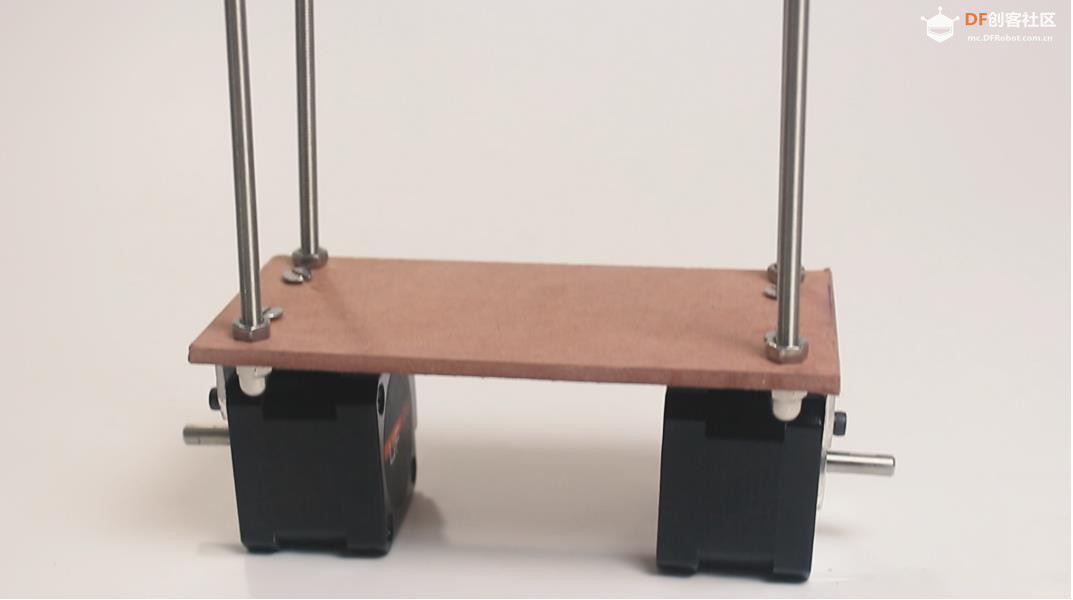
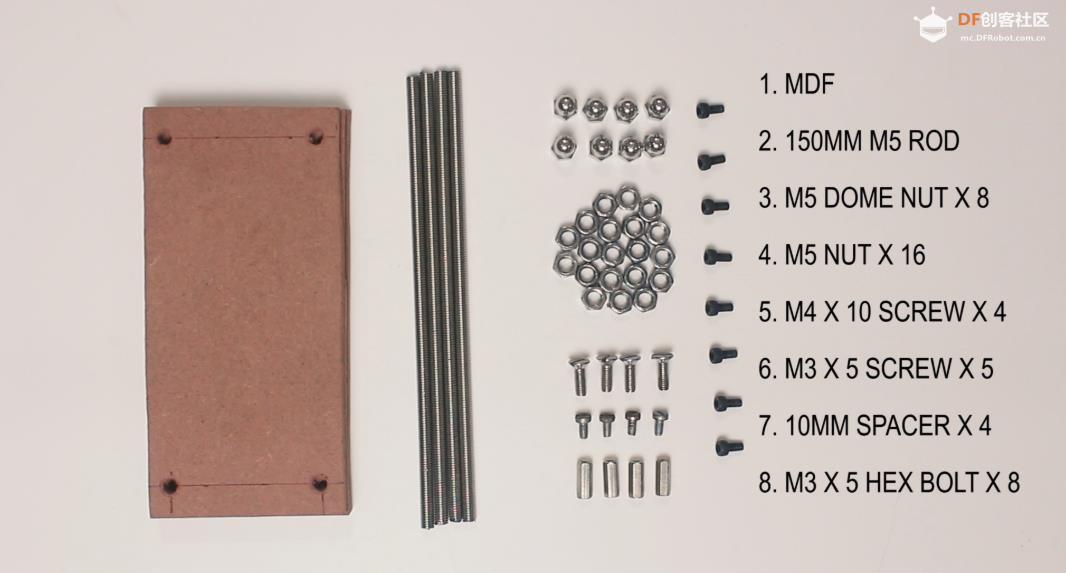
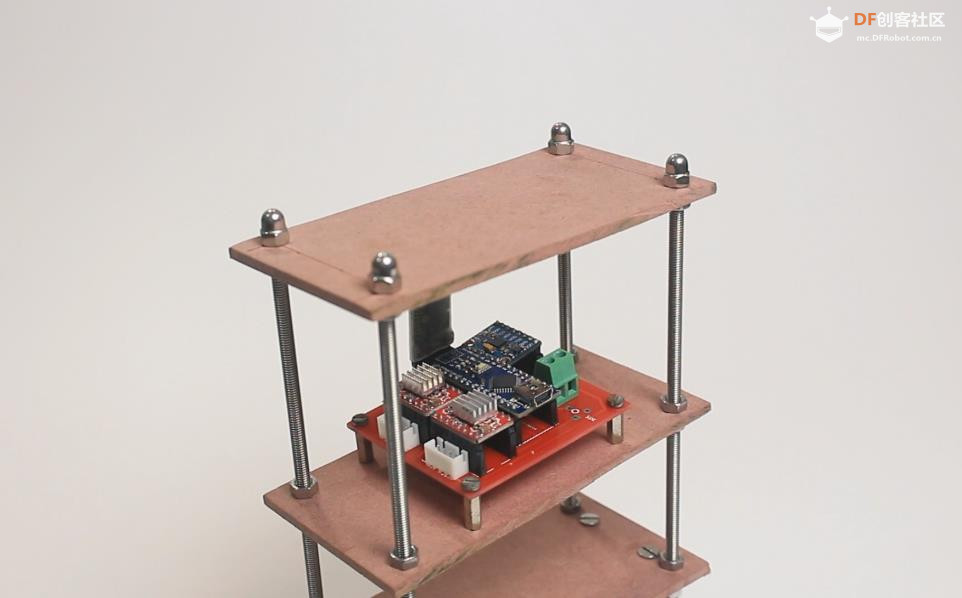
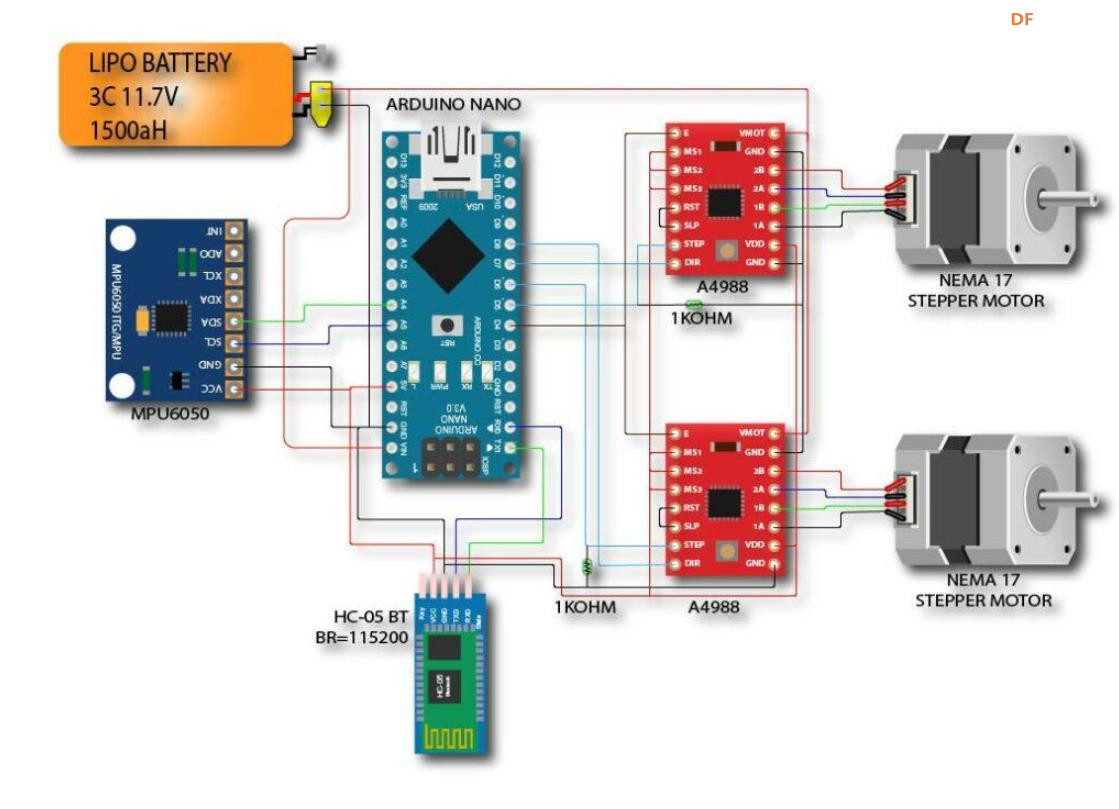
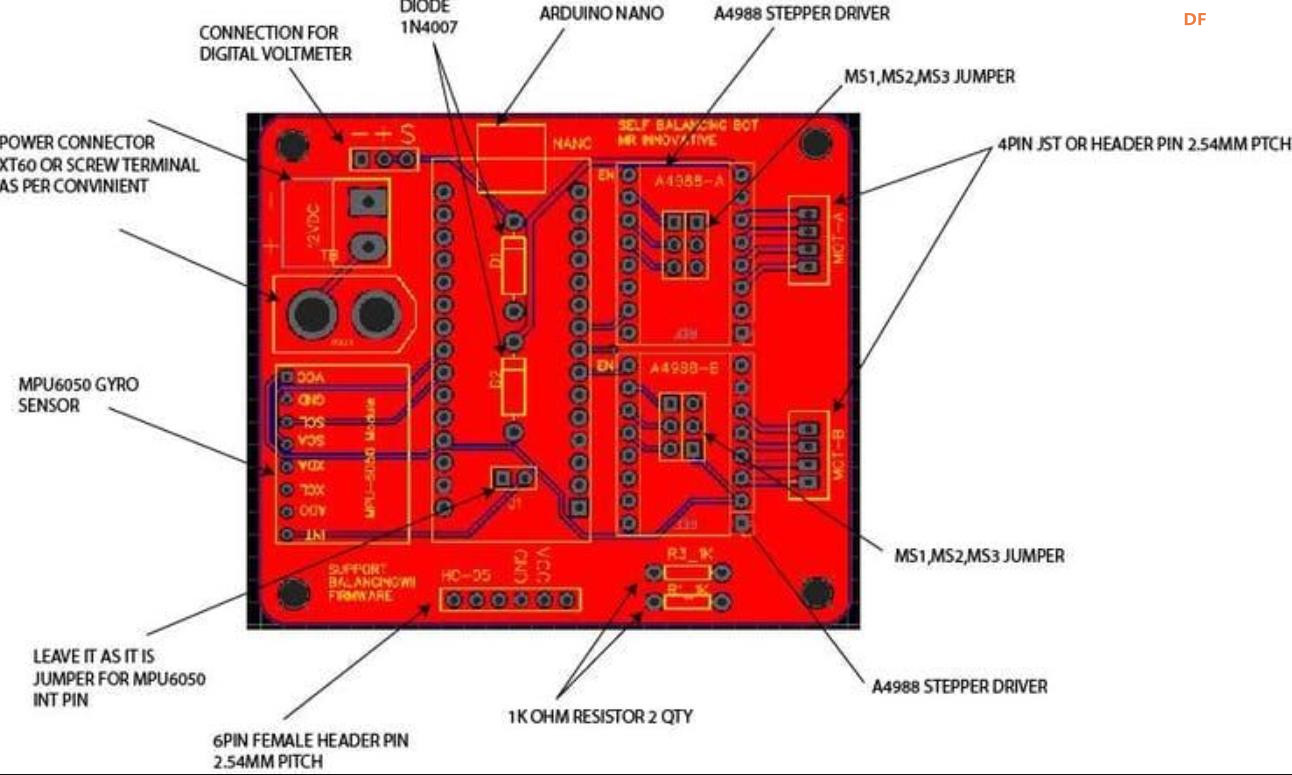
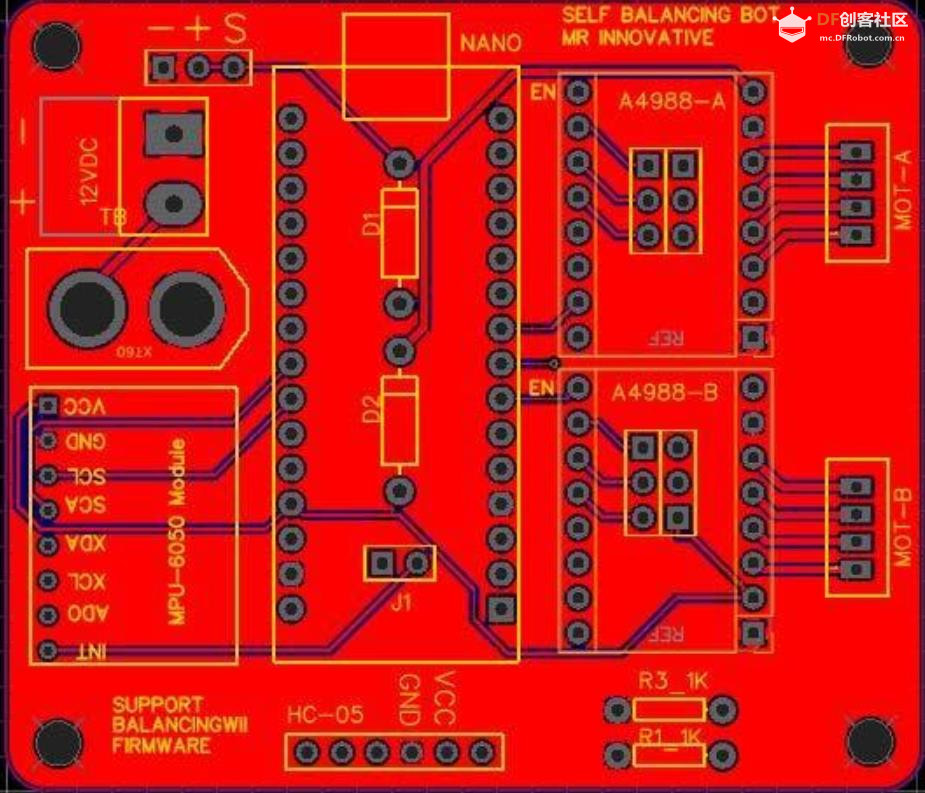
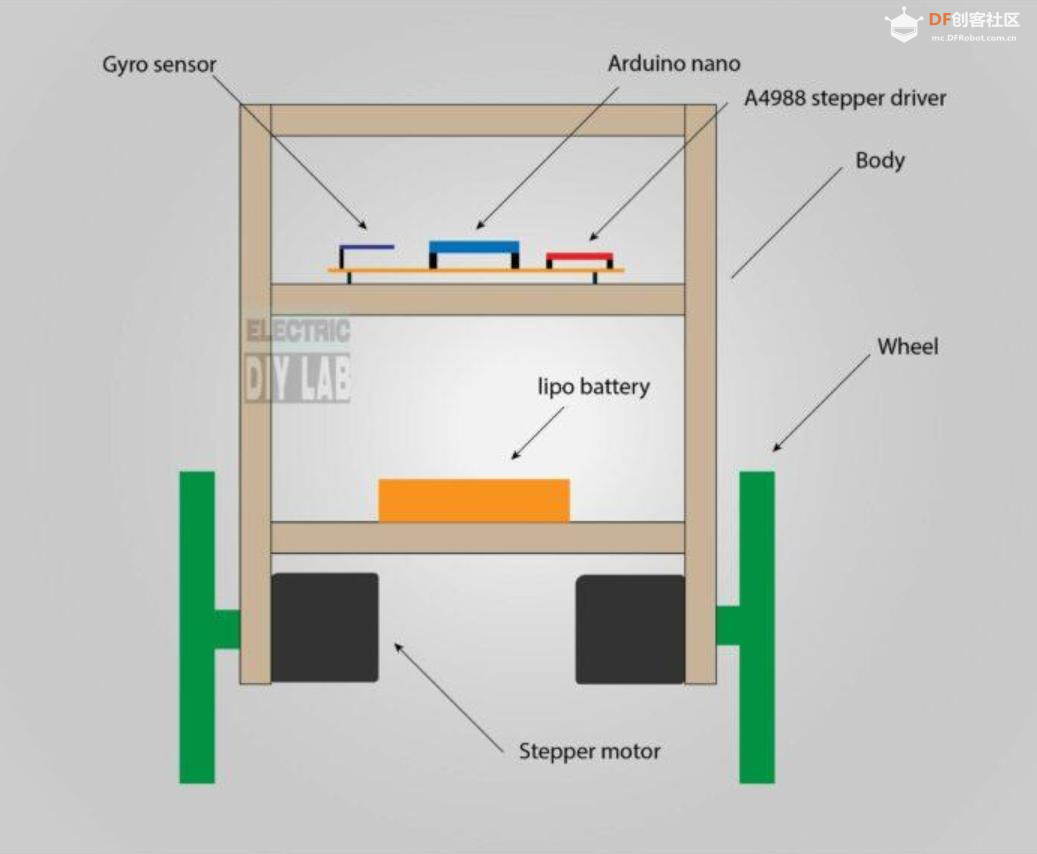
## 第 2 步:规划 PCB 细节 朋友们好,这篇文章是关于 DIY 自平衡机器人的,在这篇文章中,我将展示如何构建自己的自平衡机器人。 我尝试构建项目,但没有得到预期的结果,但是这个机器人结果非常好和准确,虽然这并不完美,但与我以前的机器人相比是最好的。 我使用定制的 PCB、Arduno nano、MPU6050、A4988 驱动器、HC-05 bt 模块、MDF 板和一些硬件来构建这个自平衡机器人,您可以在这篇文章中进一步找到详细的材料清单。本项目使用 Balancingwii 固件和 EZ-GUI android 应用程序,通过蓝牙连接控制机器人。 我已经准备了一个 PCB,您也可以下载 Gerber 文件来订购 PCB,或者您也可以在 easyeda 平台中编辑 PCB。https://easyeda.com/sharmaz747/self-balancing 我从 JLCPCB.COM 订购了这个 PCB,选择 JLCPCB 作为 PCB 合作伙伴的充分理由是,首先他们以实惠的价格提供高质量的 PCB,其次他们具有非常快的制造时间,因此您可以在很短的时间内获得 PCB。 如果您有任何 PCB 需求,我建议您查看 JLCPCB.COM 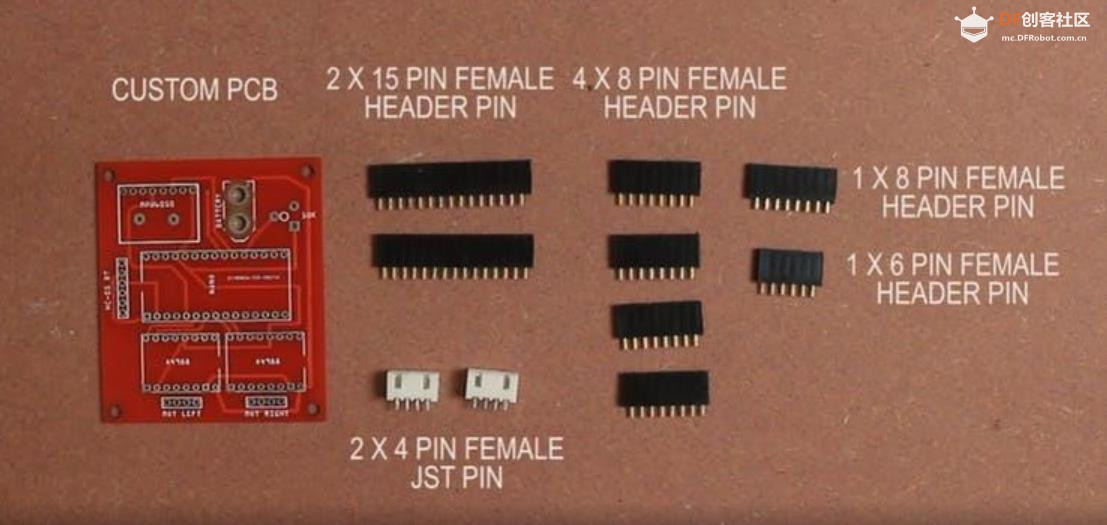 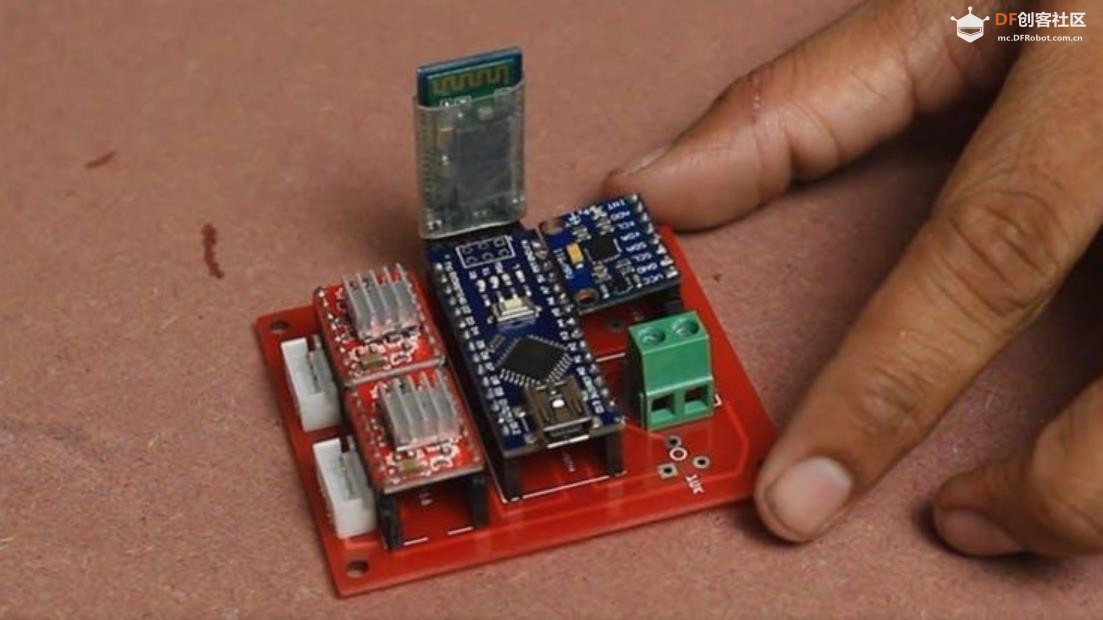 |
|
## 第5步 编程: 下载 balancingwii 要开始对 arduino 进行编程,首先我们需要下载一个名为 balancingwii 的平衡机器人固件,该固件基于用于四旋翼和多旋翼飞行无人机的 Multiwii 固件。 您可以在此处了解有关 Multiwii 的更多信息,特别感谢开发此固件的 Mahowik。单击此处下载固件 balancingwii,现在单击绿色按钮克隆或下载。固件将以 ZIP 格式下载到您的 PC 中。 现在解压缩下载的文件,打开新创建的文件夹并删除图像中突出显示的三个文件, 另外,包含 balancingwii.ino 文件的文件夹名称必须相同,否则会出现编译错误。现在在 Arduino 中打开 balancingwii.ino 文件,编译代码并上传,无需更改任何内容。上传代码前不要忘记关闭 BT 模块。 如果您的MPU6050方向与我的方向不同,则需要在 config.h 文件中更改此行 您可以在此处更改 PITCH 到 ROLL #define CURRENT_AXIS PITCH // 可以选择 ROLL 或 PITCH axis 作为当前轴。 默认情况下,大多数 HC-05 BT 模块都带有默认的 9600 波特率。 但对于此项目,请注意您的 HC-05 BT 模块的波特率必须为 115200,否则您将无法连接 android 应用程序 您可以通过 AT 命令更改 HC-05 bt 模块的波特率,在 google 上搜索它会得到很多关于它的教程。 /* 这是串行接口的速度 */ #define SERIAL0_COM_SPEED 115200 #define SERIAL1_COM_SPEED 115200 #define SERIAL2_COM_SPEED 115200 #define SERIAL3_COM_SPEED 115200 如果您觉得您的机器人响应速度较慢,那么您可以尝试在 config.h 文件中更改此设置,但请记住这些值必须处于 constraint 中。 #define MAX_SPEED 350 // 应为 <= 500 #define MAX_TARGET_ANGLE 130 // 其中 10 = 1 度,应为 <= 15 度(即 <= 150) #define MAX_STEERING 90 // 应为 <= 100 Android 应用程序 我们将在这里使用 EZ-GUI 应用程序,您可以从这里了解有关 EZ-GUI 的更多信息EZ-GUI 应用程序,只需单击下面的链接或扫描下面的二维码即可从 Play 商店免费下载。 https://play.google.com/store/apps/details?id=com...   |
|
本帖最后由 驴友花雕 于 2025-6-9 05:41 编辑 附录 【Arduino 动手做】 使用 MPU6050 构建自己的自平衡机器人 项目链接:https://www.instructables.com/DIY-Self-Balancing-Robot/ 项目作者:印度 Mr innovative 项目视频(17分钟):https://www.youtube.com/watch?v=aUbBUd-hBLI 项目代码:https://github.com/mahowik/BalancingWii 蓝牙 MultiWii 自平衡:https://play.google.com/store/ap ... shokurov.mspcontrol  |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶




 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






