|
1070| 1
|
[项目] 【Arduino 动手做】采用麦克纳姆轮的变形机器人 |
|
这种特殊的机器人设计可以随时从机器人汽车变身为机器人蛇,并变回机器人汽车。该机器人采用一种名为麦克纳姆轮(一种全向轮)的特殊轮子设计,用于移动。这有助于机器人轻松变换形状,并在两种形态下轻松导航。这在运输方面具有巨大的优势。机器人汽车可以移动到特定的物体/货物处,然后变身为蛇形,绕着物体旋转,还可以使用叉车搬运物体并投放到指定位置。我们正在努力使其实现集群控制,以便它也能独立完成工作。 原型 V1.0 表明概念验证是有效的。 使用单个伺服器来锁定轮轴。 机器人的CAD设计 版本 2.0 在关节处有 2 个伺服器,在提升物体时有 2 个伺服器。 机器蛇的 CAD 设计。 组装好的机器人处于汽车模式。 机器人处于蛇形模式。 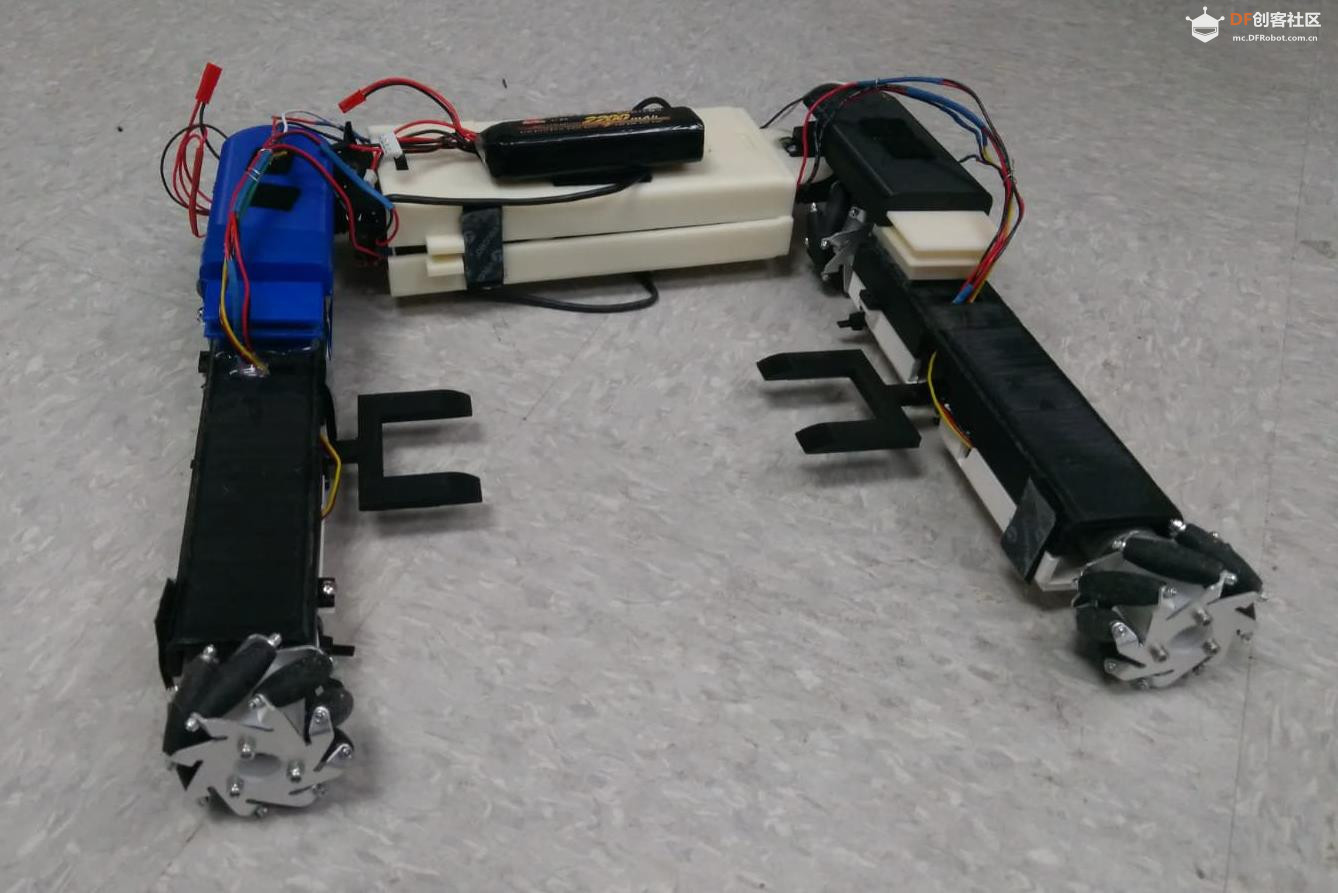  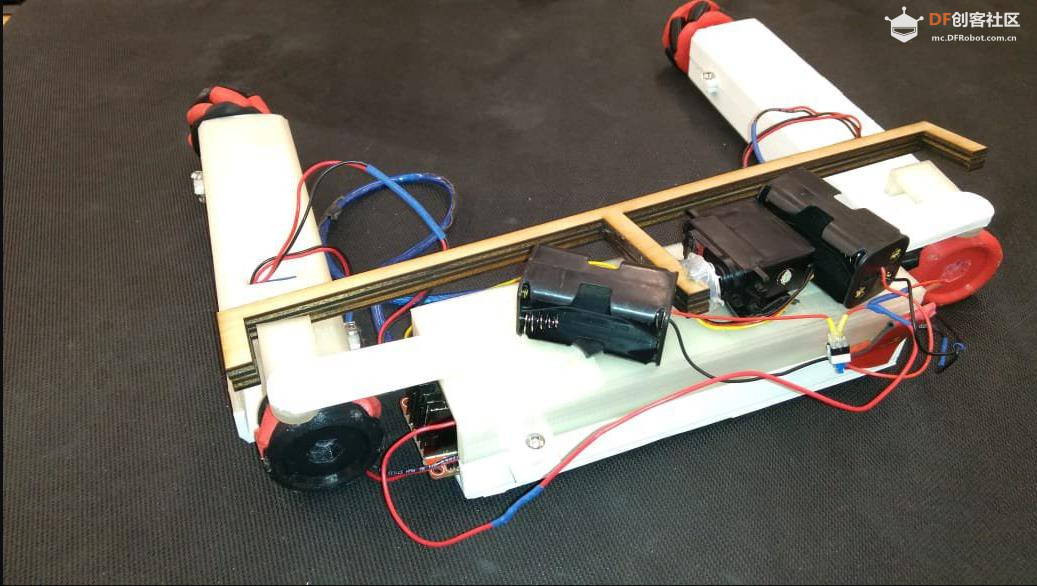 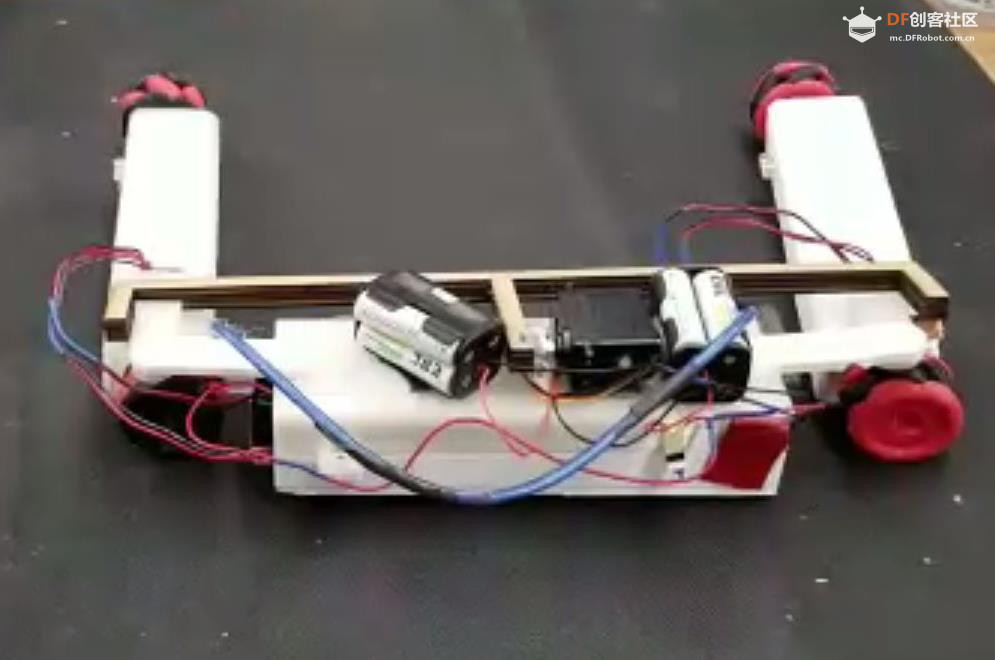  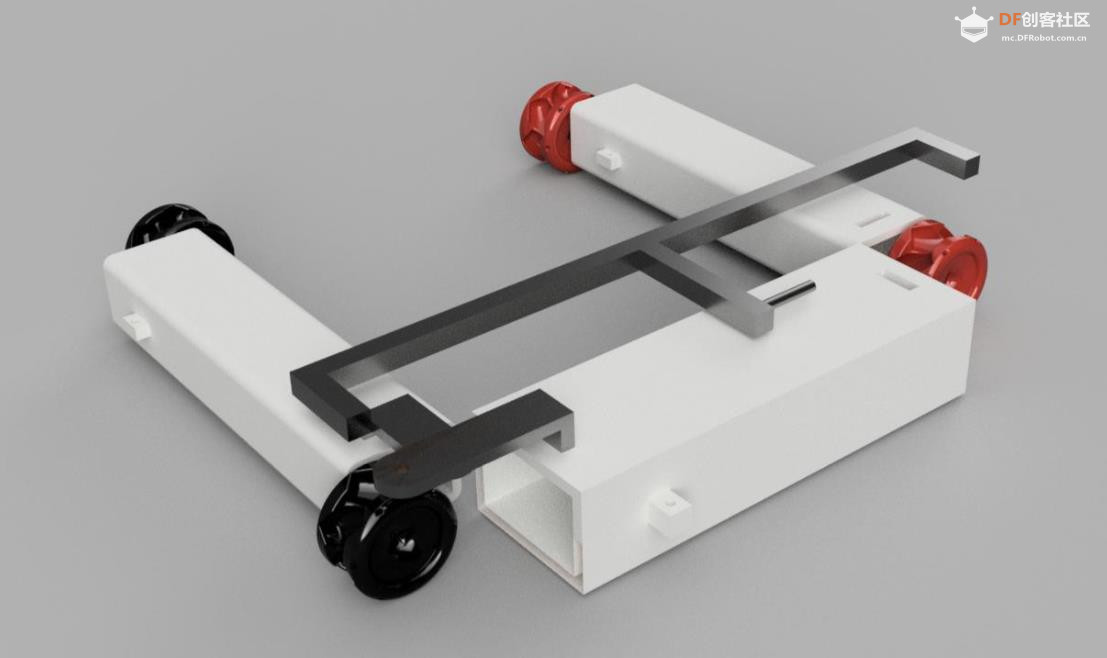  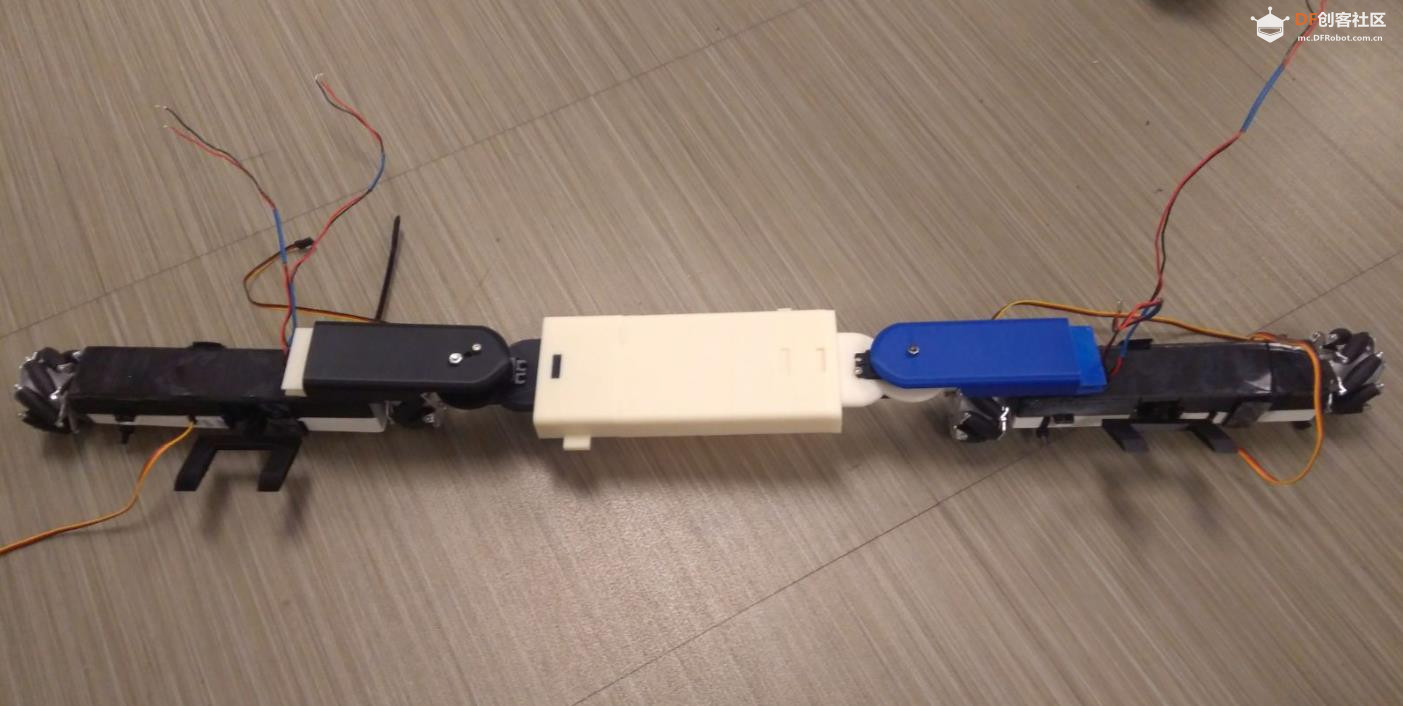 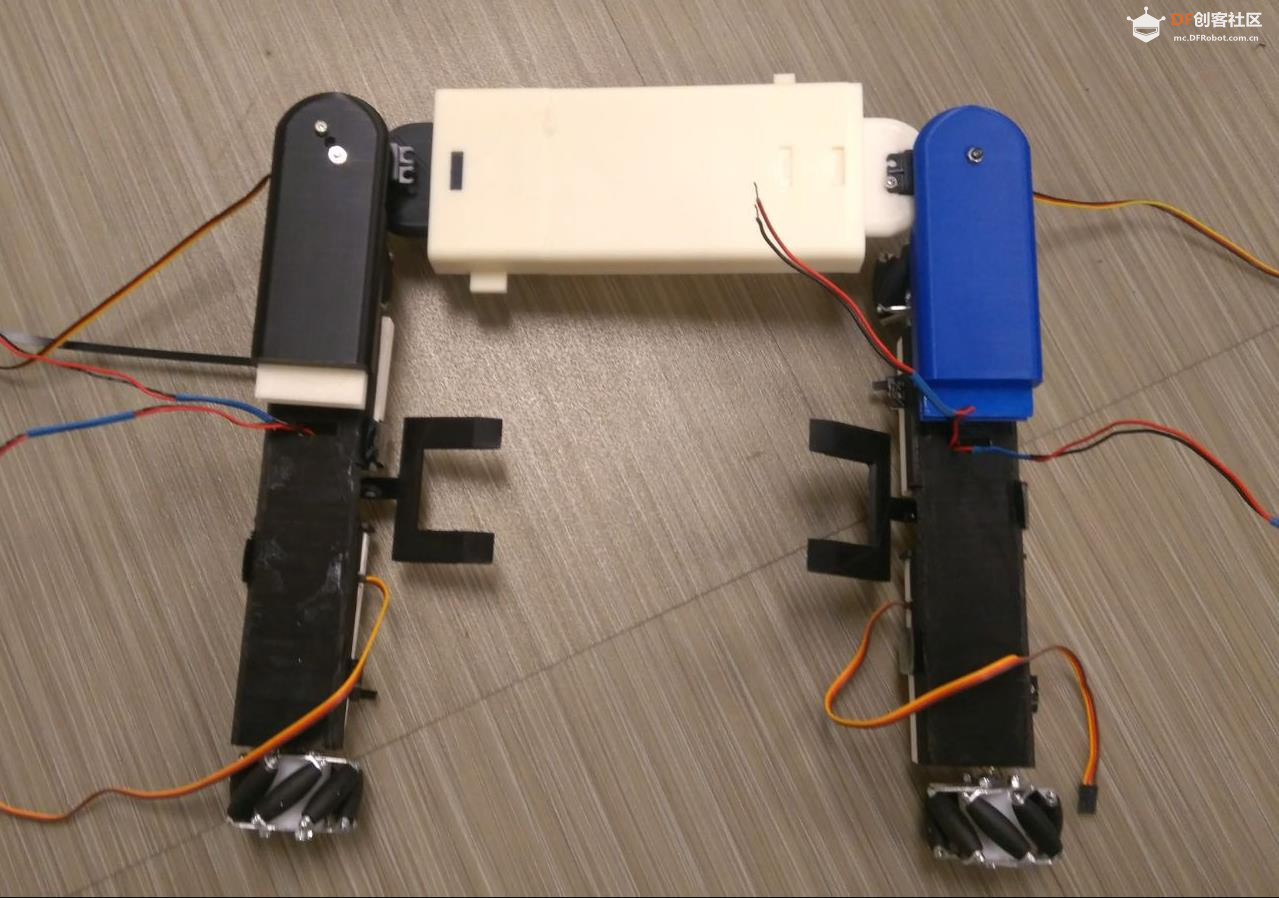 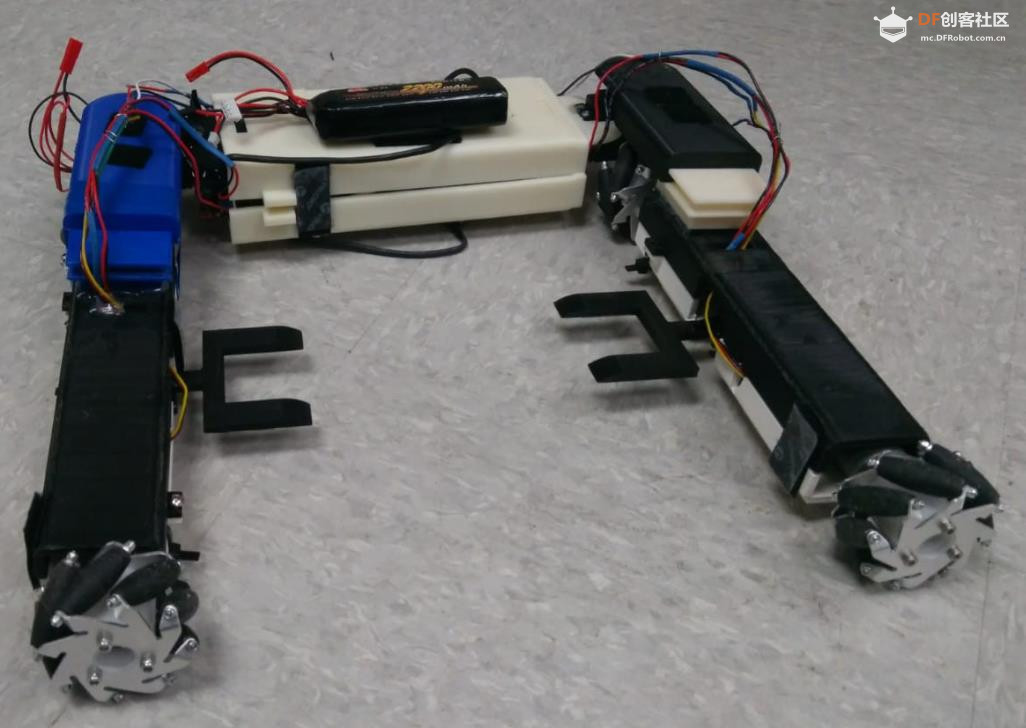 |
|
【Arduino 动手做】采用麦克纳姆轮的变形机器人 项目链接:https://hackaday.io/project/90288-project-shapeshift 项目作者:卡尔提克 项目视频 :https://cdn.hackaday.io/files/90 ... peShiftV2.0_1_1.mp4 https://cdn.hackaday.io/files/90 ... _under_progress.mp4   |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






