|
902| 0
|
[项目] 【Arduino 动手做】全新视角的自平衡远程呈现机器人算法 |
|
自平衡机器人是一个很酷的项目,许多创客喜欢在机器人世界的某个地方建造它。 在大多数情况下,您可以在互联网上找到自平衡机器人中使用的三种不同类型的电机: 步进电机 直流电动机 带正交编码器的直流电机 自平衡远程呈现机器人通过 https://cloud.husarion.com/ 提供的 Web 用户界面在全球范围内进行控制。您不仅可以控制该机器人,还可以通过 hVideo 应用程序(可在 App Store 或 Google Play 中找到)查看与该机器人集成的智能手机中的图像) 机器人的主要特点 • Web 用户界面 • 用于智能手机或小型平板电脑(iPad mini 是最大适配的平板电脑)的支架,带有 hVideo 应用程序(Android 或 iPhone/iPad)) • 稳定算法不受干扰 • 用于平衡启动/停止模式的伺服电机控制支腿 • 平稳驾驶 • 防止机器人损坏的底盘 机器人硬件概述 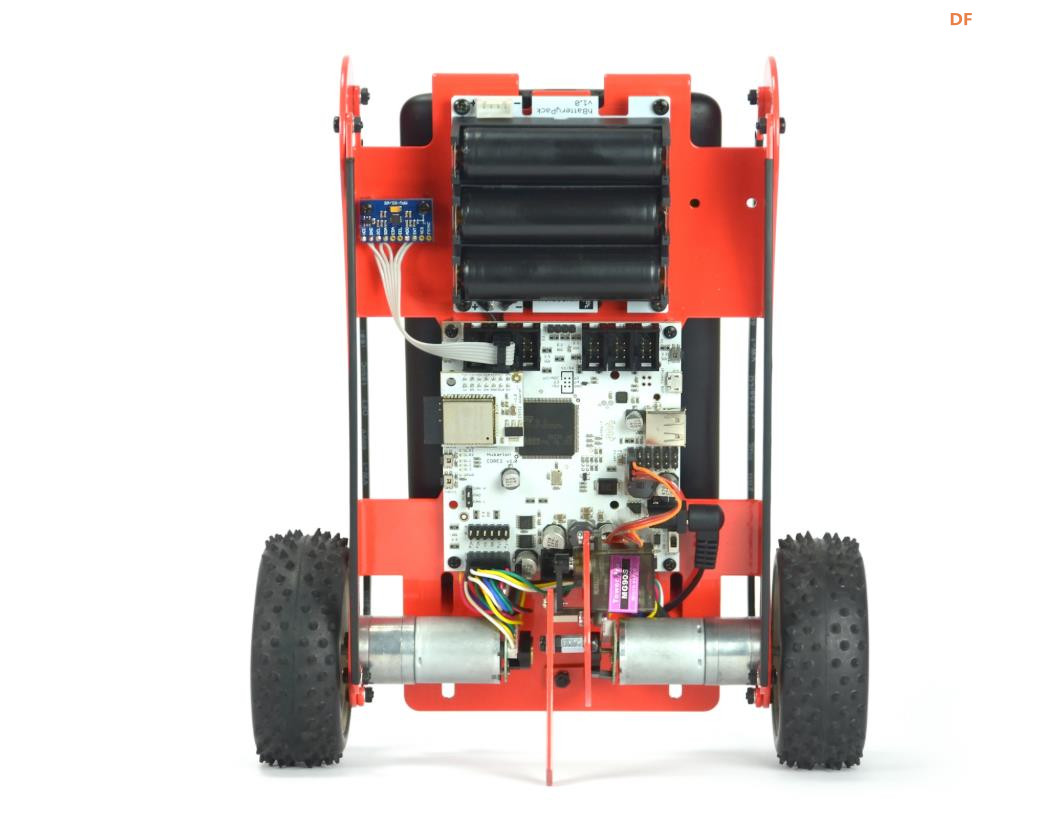 • 基于 Husarion CORE2 机器人控制器,具有 Arduino 兼容层和 RTOS • 2 个带正交编码器的直流电机 • MPU9250惯性测量单元(陀螺仪 + 加速度计)和集成的 DMP 功能,用于完整的 3D 方向数据 • 1 个用于腿的舵机 • 3 个 18650 锂离子电池座(无需充电即可运行长达 8 小时) 稳定算法概述 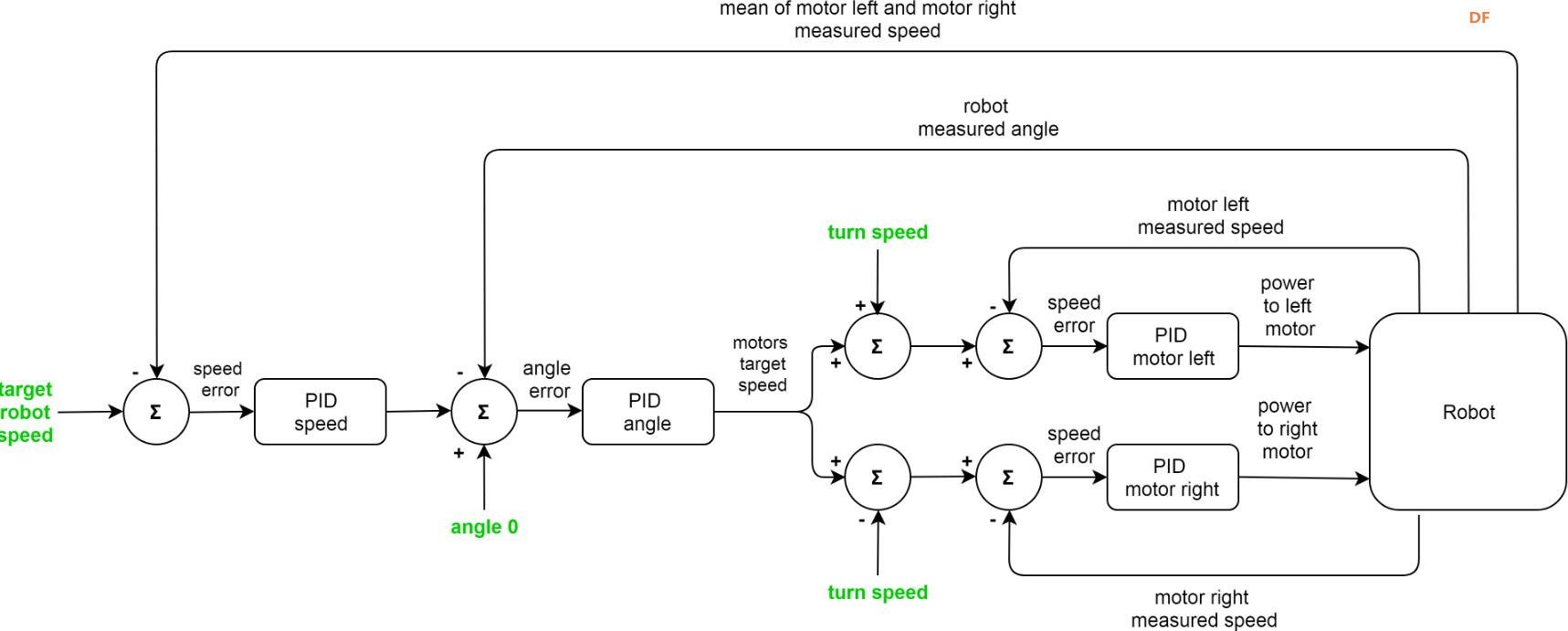 该机器人使用 4 个 PID 调节器: • 每个直流电机 1 个,带有用于电机速度调节的编码器 • 用于在机器人底盘和地面之间保持所需的角度 • 用于控制电机角度以获得整个机器人所需的速度 以下是稳定算法代码的示例: 【Arduino 动手做】全新视角的自平衡远程呈现机器人算法 项目链接:https://medium.com/husarion-blog ... orithm-d50d41711d58 项目作者:多米尼克·诺瓦克 项目视频(动画) : https://miro.medium.com/v2/resize:fit:640/format:webp/0*3wf00ERu6WEgtRZm. https://miro.medium.com/v2/resize:fit:640/format:webp/0*jJ06x3rUaJmhJBW2. https://miro.medium.com/v2/resize:fit:640/format:webp/0*K_6SGkAljzrSUbOa. https://miro.medium.com/v2/resize:fit:640/format:webp/0*AF1OEV1RkC2Tv9ag. 项目代码:https://github.com/husarion/self-balancing-telepresence-robot     |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






