|
43223| 28
|
[教程] 铁熊玩创客 | 吃货战车:谁说泡面只能用来填肚子 |

|
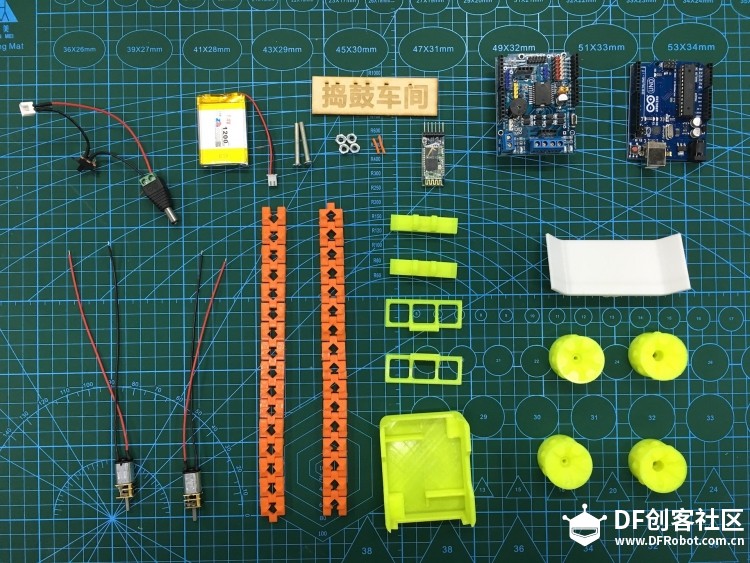
【题外话】转眼在社区发帖已经度过了1个年头了,这应该是社区2018年的第一帖吧~在这里祝大家新年快乐!!! 听说社区最近特别流行履带车,那就随波逐流也来搞一发吧。但是传统的履带车玩起来又没有意思,又没有新奇的玩法呢? 正好看到小伙伴在玩 Makey Makey 水果钢琴,顿时天灵盖一亮,为何不搞一辆 Makey 履带车呢?然后给它配上一个超大的橡皮泥遥控器,一定很好玩,说干就干! 按照惯例,先来看一下效果: 铲车版:  超声波版(这辆是 maker_王 做的哈,maker_王 还做了另一辆履带坦克车:https://mc.dfrobot.com.cn/thread-30284-1-1.html):  英雄联盟:  演示视频: ## 履带车制作过程 准备好履带车所需的材料。 电子元件:
3D 打印结构件:
另外还需要:
 1、安装从动轮:准备好从动轮、底盘、M4螺丝和螺母,将从动轮安装到底盘上。 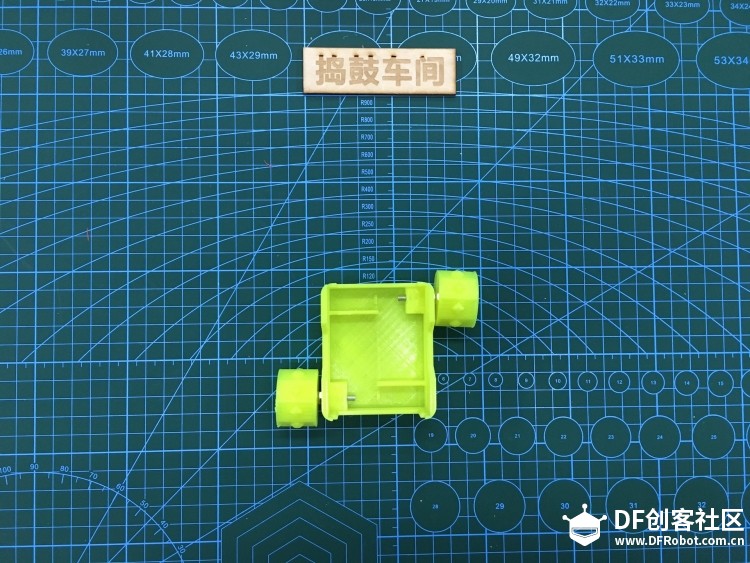 2、安装主动轮:准备好 N20 金属齿轮电机和主动轮,将主动轮安装到底盘上。  3、安装电池:准备好锂电池和盖板,将锂电池安装到底盘上,同时将盖板嵌入卡槽,固定好 N20 电机。 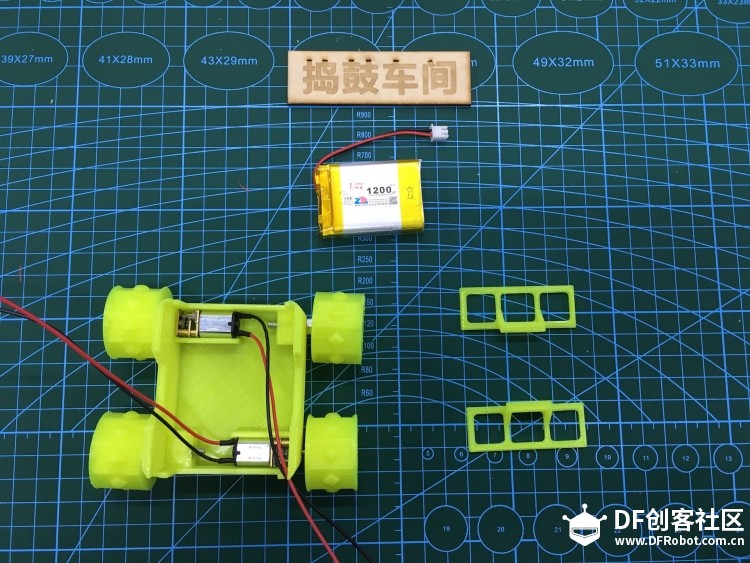  4、安装连接器:准备好连接器,安装到底盘卡槽上。 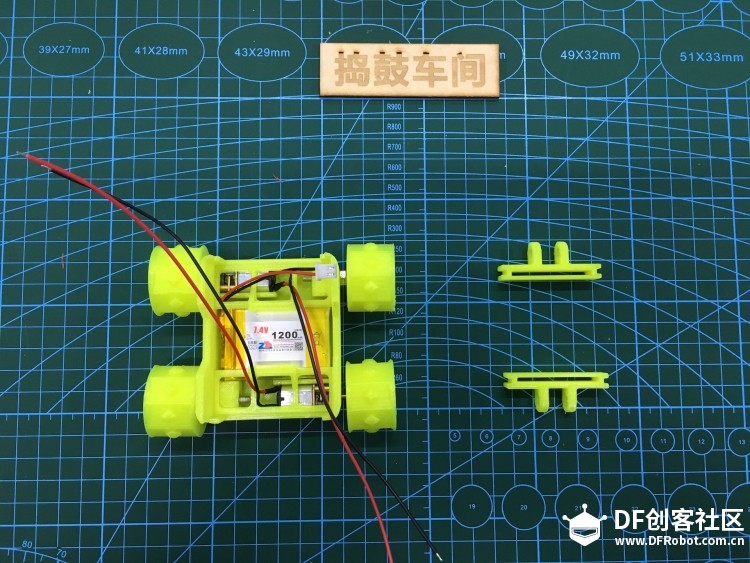  5、安装电源开关:准备好电源开关(已焊接好),并与电源连接。 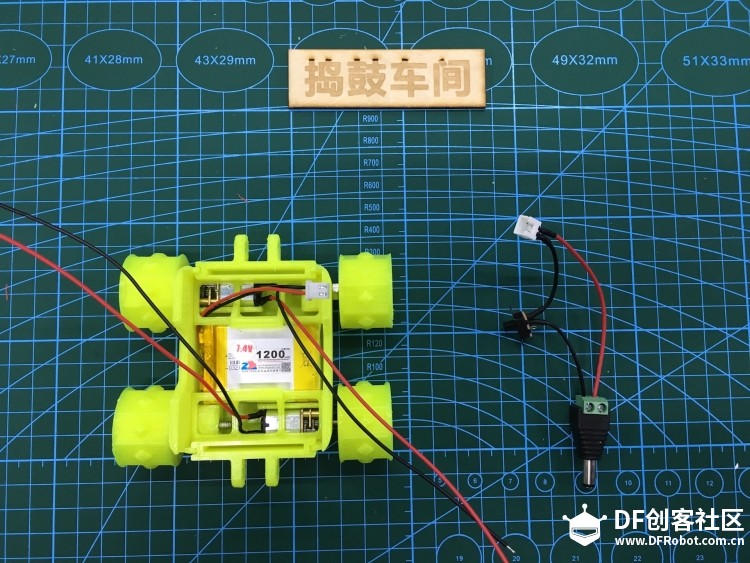 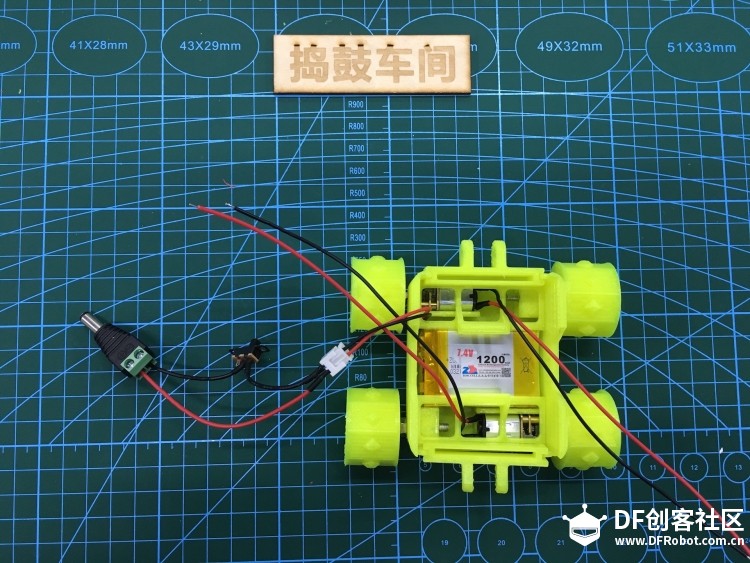 6、安装 Arduino 控制器:准备好 Arduino Uno 和电机驱动扩展板,并将 Arduino Uno 嵌入底座卡槽中。 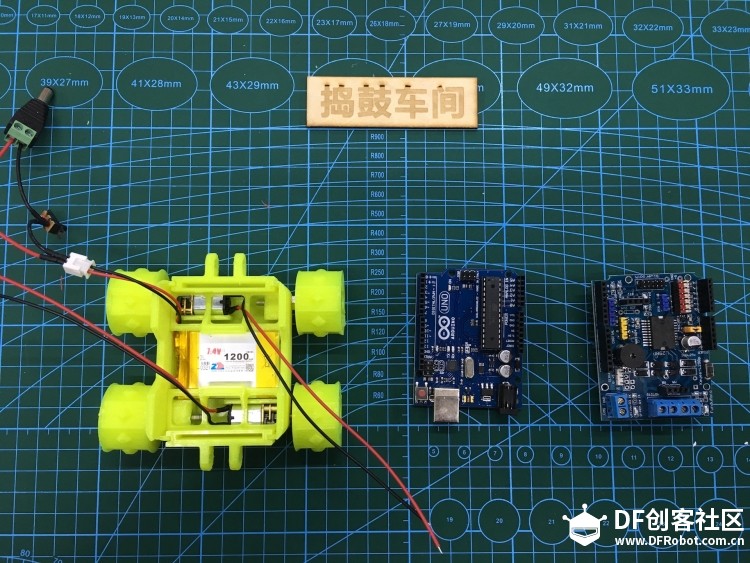 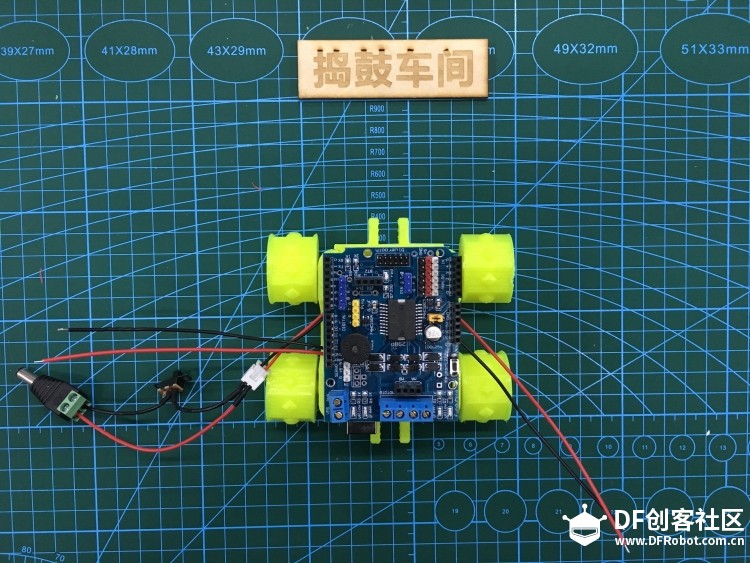 7、连接电源:将电源与 Arduino 连接,注意断开电源开关。 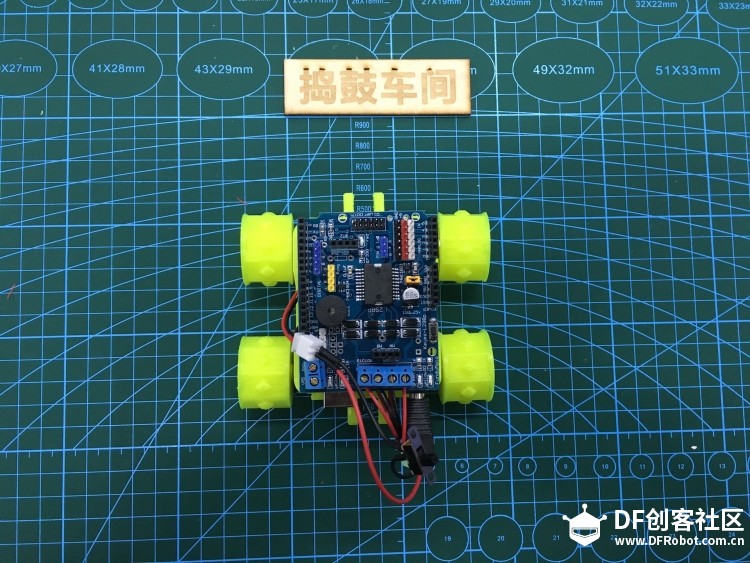 8、安装履带:准备好两条履带,并安装到轮子上。 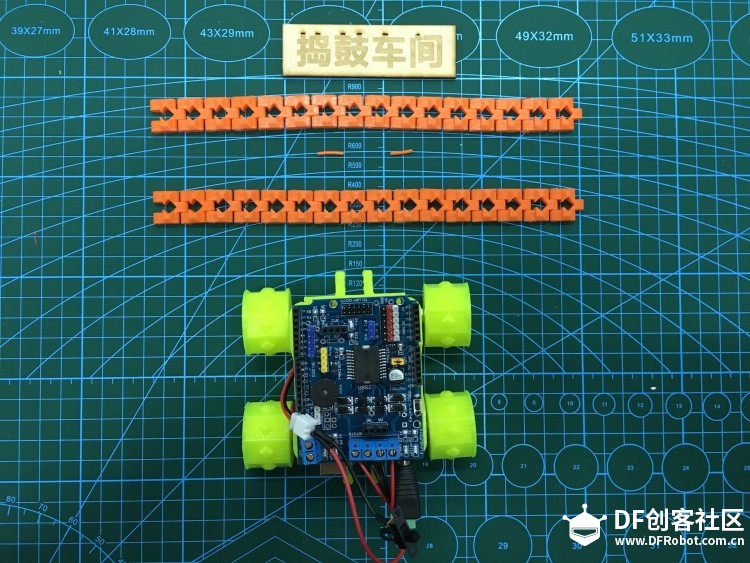 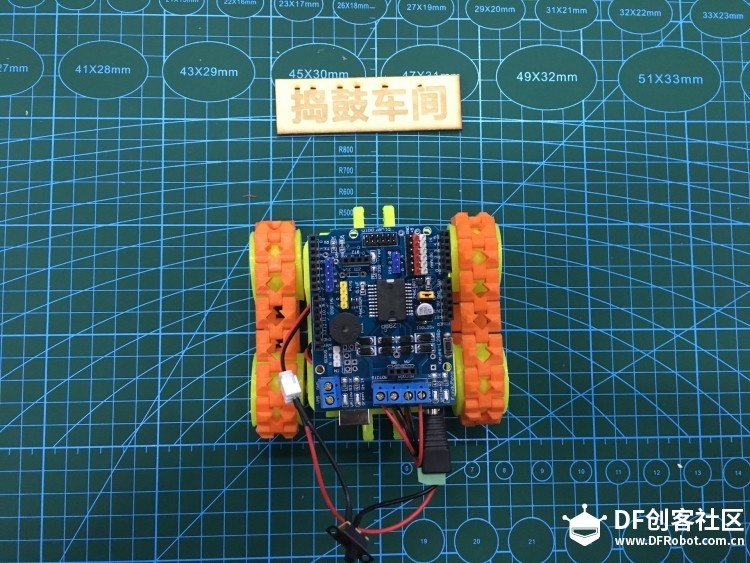 9、安装蓝牙模块:准备好蓝牙模块,并将蓝牙模块安装到扩展板相应位置。 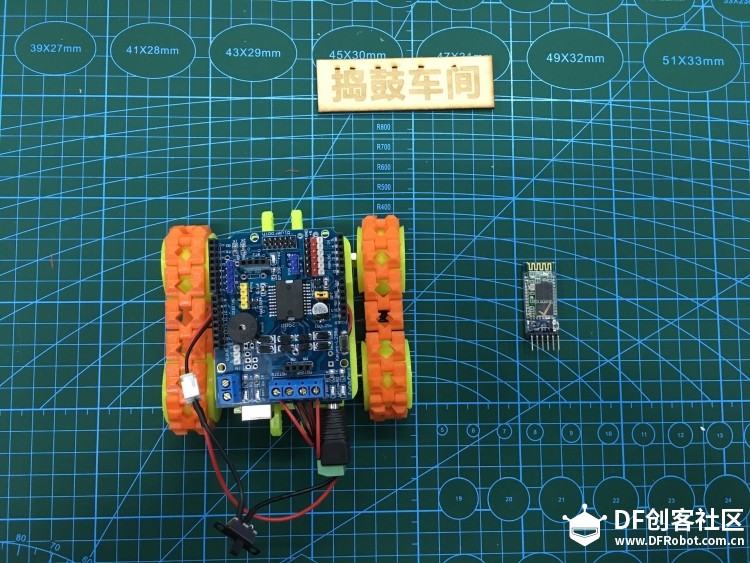 10、安装履带车铲子:准备好铲子,并将铲子嵌入到连接器相应位置。 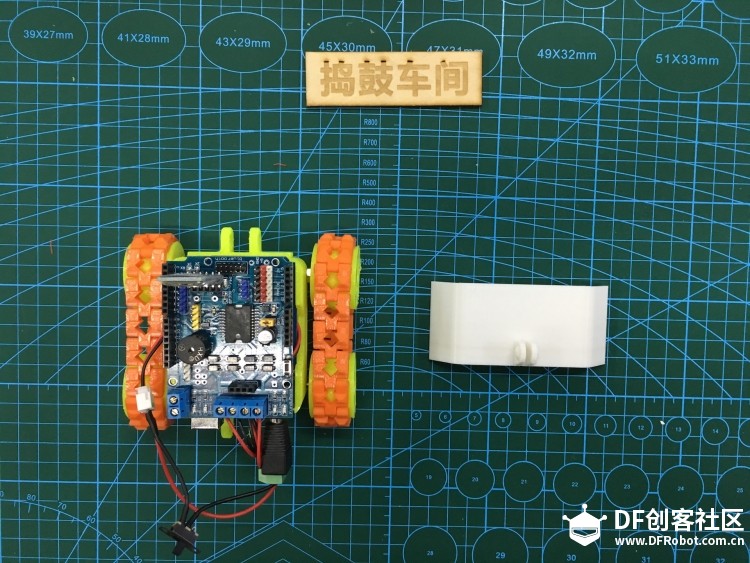  至此,履带车就安装完成啦。 ## 橡皮遥控器制作过程 准备好所需的材料:
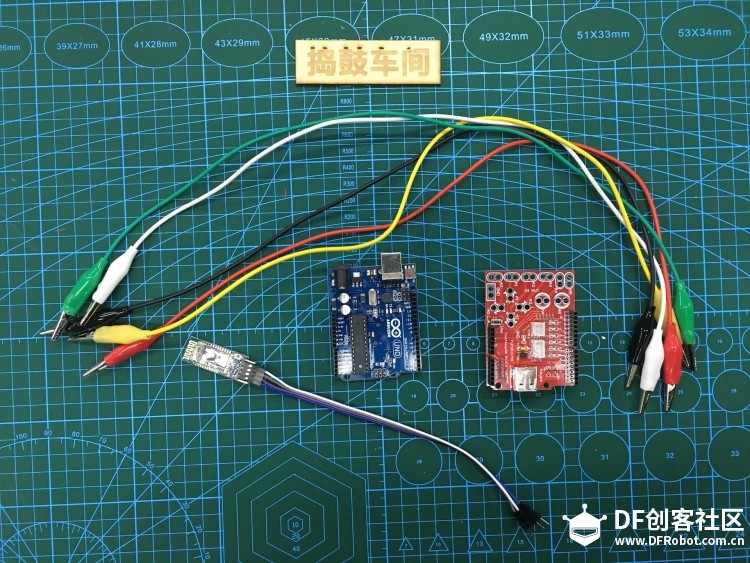  利用鳄鱼线,将橡皮泥与 Makey 扩展板相连,并将蓝牙模块连接到 Makey 扩展板上。  ## 程序与电路 程序比较简单,主要就是两个 Arduino 之间蓝牙通信。具体电路连接也不再赘述,直接看程序就好。 履带车程序: ## 附件 3D 打印结构件下载地址: 链接: https://pan.baidu.com/s/1dE24aQl 密码: 9rye # 往期作品: ## 创客技巧 - 创客项目缺少高颜值电路图?看这里就对了:https://mc.dfrobot.com.cn/thread-289862-1-1.html - 小白也能学会的激光切割创意盒子设计方法:https://mc.dfrobot.com.cn/thread-276550-1-1.html ## 桌面机器人 - 桌面萌宠 Pando,这个机器人靠卖萌为生好多年:https://mc.dfrobot.com.cn/thread-35162-1-1.html - 桌面萌宠 Pandy,谁说智能车不能卖萌:https://mc.dfrobot.com.cn/thread-36721-1-1.html - 吃货战车:谁说泡面只能用来填肚子:https://mc.dfrobot.com.cn/thread-34679-1-1.html - 纯野生黑科技,分分钟教你自制最skr的全向麦熊小车:https://mc.dfrobot.com.cn/thread-268968-1-1.html ## 智能家居 - Hey Siri, 打开 HAY 旋转灯:https://mc.dfrobot.com.cn/thread-26865-1-1.html - Hey Siri,请告诉我传感器数据:https://mc.dfrobot.com.cn/thread-28859-1-1.html ## 创意生活 - HAY,你好 ── DIY HAY旋转灯:https://mc.dfrobot.com.cn/thread-26212-1-1.html - DIY 你的专属酷炫照片投影灯:https://mc.dfrobot.com.cn/thread-26900-1-1.html - 好色灯:你们吸猫,我吸色:https://mc.dfrobot.com.cn/thread-34483-1-1.html - DIY 你的专属酷炫照片投影灯:https://mc.dfrobot.com.cn/thread-26900-1-1.html - 没有什么问题是猜拳不能解决的:https://mc.dfrobot.com.cn/thread-38060-1-1.html - 律动头饰皇冠:每个女孩心中都有一个公主梦:https://mc.dfrobot.com.cn/thread-267927-1-1.html ## 学生作品 - 陈朔:戒烟帽:https://mc.dfrobot.com.cn/thread-280204-1-1.html - 梁立昊:体感骑行安全帽:https://mc.dfrobot.com.cn/thread-280093-1-1.html ## HCRbot 机器人(SLAM) - HCRbot 系列 1──HCRbot 机器人简介:https://mc.dfrobot.com.cn/thread-26938-1-1.html - HCRbot 系列 2──HCRbot 硬件介绍与设置:https://mc.dfrobot.com.cn/thread-26939-1-1.html - HCRbot 系列 3──HCRbot 上位机 PC 端软件设置:https://mc.dfrobot.com.cn/thread-26975-1-1.html - HCRbot 系列 4──HCRbot下位机设置(树莓派版):https://mc.dfrobot.com.cn/thread-27020-1-1.html - HCRbot 系列 5──HCRbot下位机设置(Odroid XU4版):https://mc.dfrobot.com.cn/thread-27161-1-1.html - HCRbot 系列 6──HCRbot 底层驱动 OpenCR 设置:https://mc.dfrobot.com.cn/thread-27296-1-1.html - HCRbot 系列 7──启动 HCRbot 机器人:https://mc.dfrobot.com.cn/thread-28248-1-1.html - HCRbot 系列 8──远程控制 HCRbot 机器人:https://mc.dfrobot.com.cn/thread-29354-1-1.html - HCRbot 系列 9──控制 HCRbot 机器人绘制平面地图(SLAM):https://mc.dfrobot.com.cn/thread-29936-1-1.html ## 其他 - 掌控板 | 让掌控板像 Mixly 串口监视器一样绘图:https://mc.dfrobot.com.cn/thread-288929-1-1.html |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 活跃会员
活跃会员
 老版主限定
老版主限定
 创作达人
创作达人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






