|
1042| 2
|
[项目] 【Arduino 动手做】DIY 顶级项目:PROKNOW 自平衡机器人 |
|
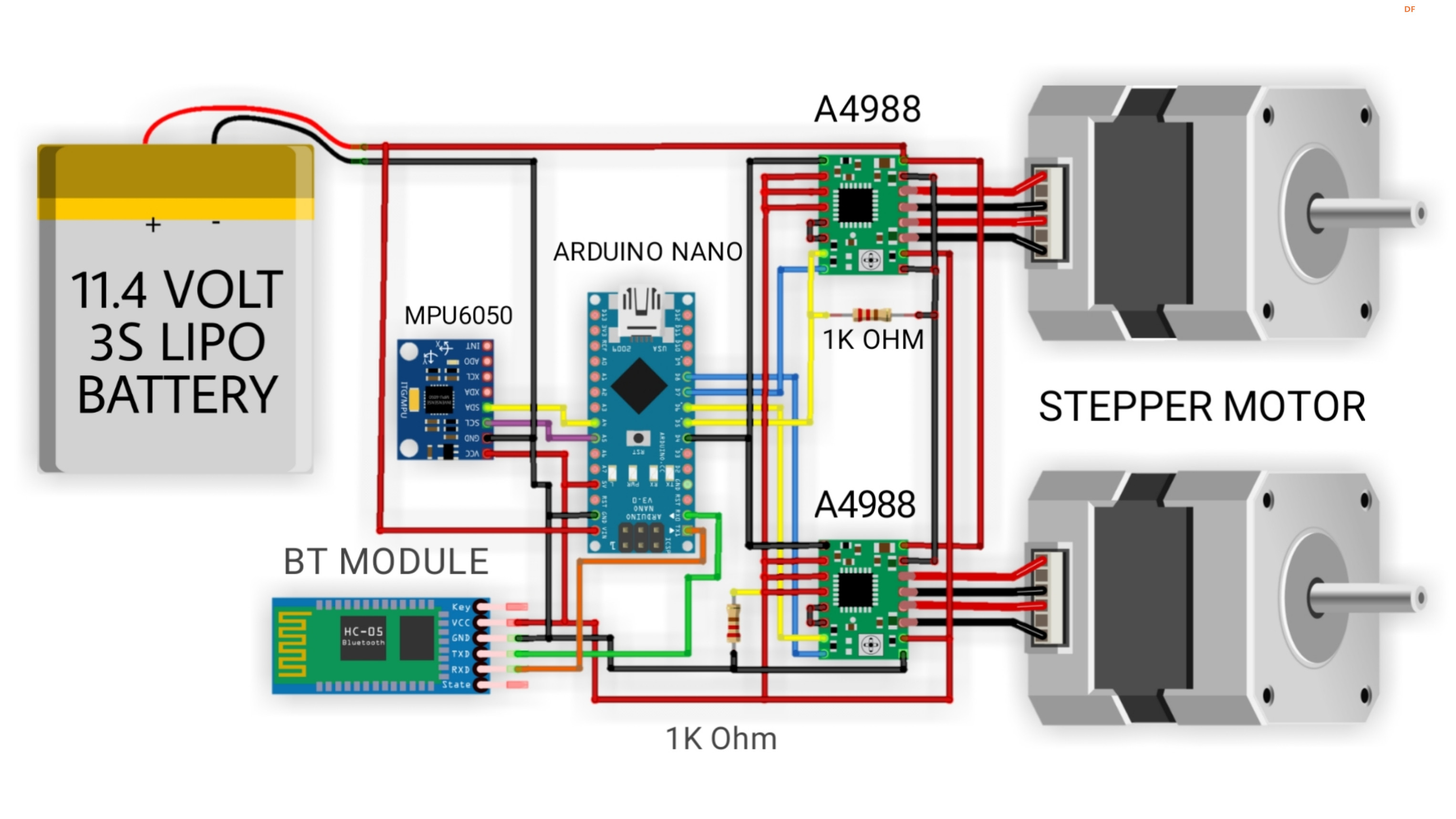
为了构建这个项目,我使用了 Arduino nano MPU6050 A4988 驱动程序 HC-05 bt 模块 MDF 板。Arduino Uno 也适用于这个自平衡机器人。 本项目使用 Balancingwii 固件和 EZ-GUI 安卓应用程序,通过蓝牙连接控制机器人。 这是 Arduino 的顶级项目,这是一个非常有趣的DIY。 这是一个不会让自己掉下来的双腿机器人,在这里我使用 Nema 17 步进电机和 A4988 步进电机驱动器以及一些 Arduino 编程来平衡这个机器人。我还使用了陀螺仪传感器 (MPU6050),它可以连续地将机器人方向数据发送到控制器。步进电机对 mpu 6050 发送的数据做出反应,如果机器人在前面倒下,它会移动字,如果机器人向后倒下,它会向后移动字。 我们还可以借助智能手机向左、向右、向前和向后移动它通过蓝牙,这意味着它是蓝牙控制自平衡机器人。 使用的材料:) 亚马逊 [印度]: 2*NEMA 17 步进电机: https://bit.ly/2tMplGh 2*10英寸轮:https://bit.ly/388MQZd Arduino Nano:https://bit.ly/2NfgzY3 HC-05 蓝牙模块:https://bit.ly/3a5AdzU 2*A4988 步进电机驱动器:https://bit.ly/37Q3fBw MPU-6050:https://bit.ly/2R9KVMN 3S Lipo 电池:https://bit.ly/2tU3GMA Lipo 电池尼龙表带:https://bit.ly/2uHYThB PCB/接头引脚:https://amzn.to/36NPanZ 2* 1K 欧姆电阻 2 *缓冲器: 螺母和螺栓 中 密度 纤维板   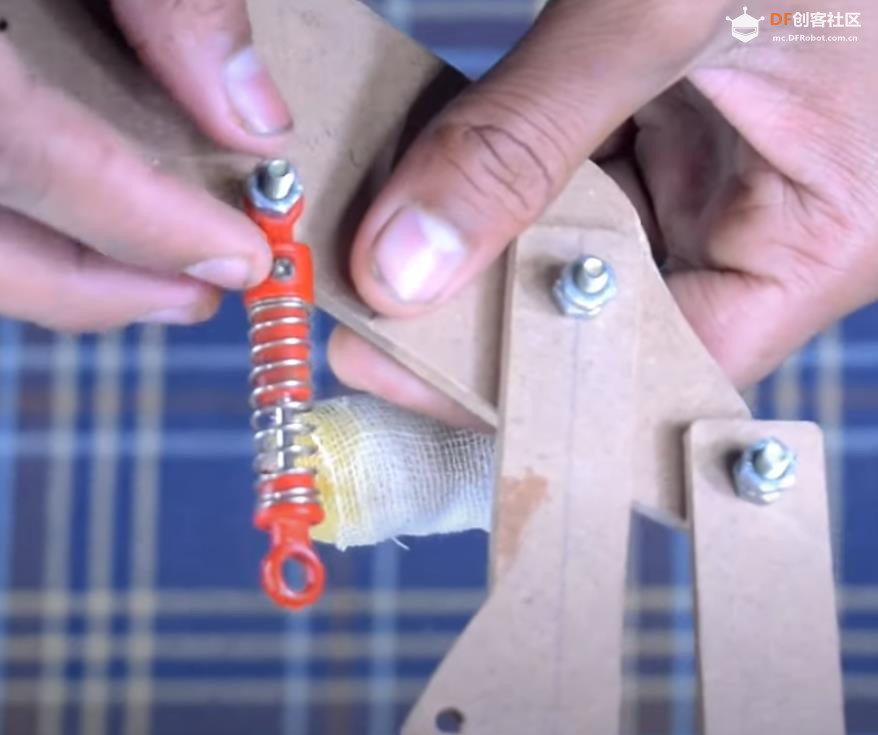    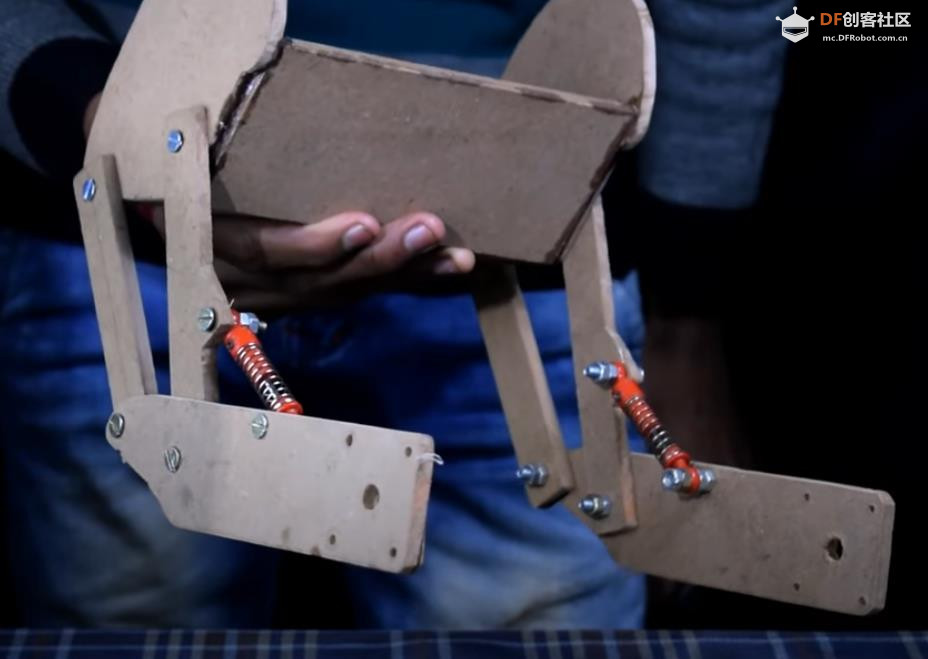   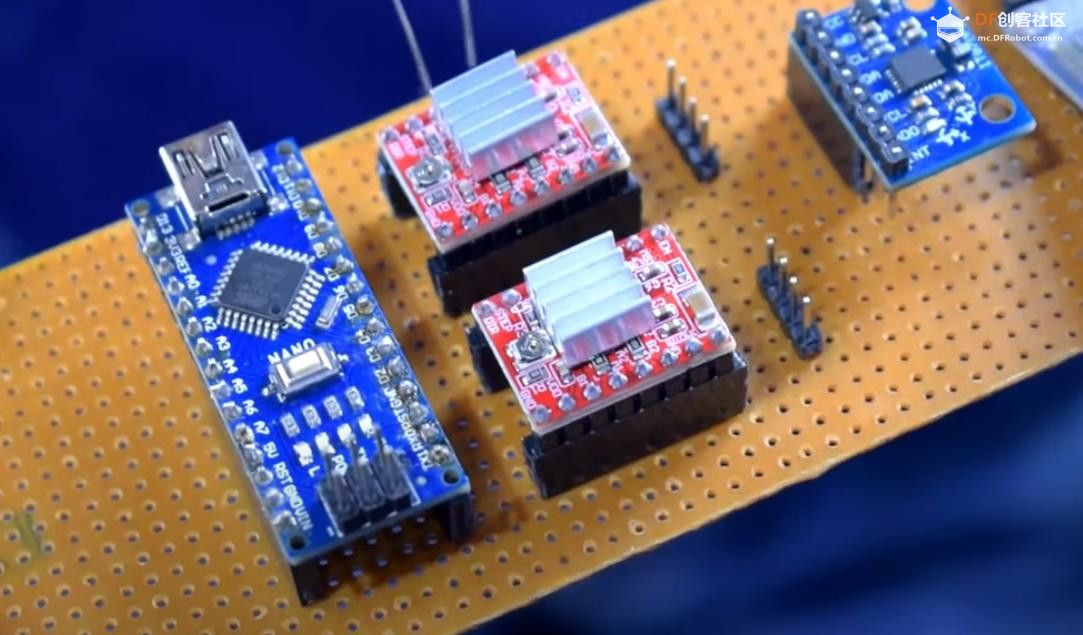 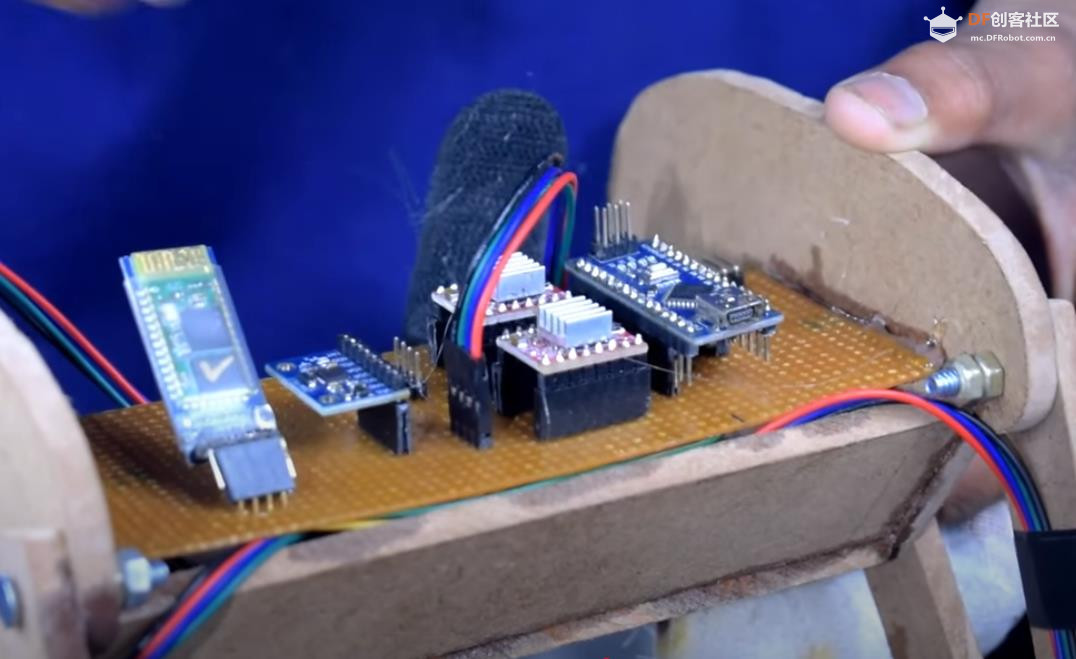 |
|
本帖最后由 驴友花雕 于 2025-7-1 16:30 编辑 【Arduino 动手做】Arduino 的顶级项目:PROKNOW 自平衡机器人 项目链接:https://www.youtube.com/watch?v=DlsZUFGkmaQ&t=52s 项目作者:Pro Know 项目视频 :https://www.youtube.com/watch?v=DlsZUFGkmaQ&t=52s 项目代码:https://drive.google.com/drive/f ... EI_eXcrDRgDm0w1IleI 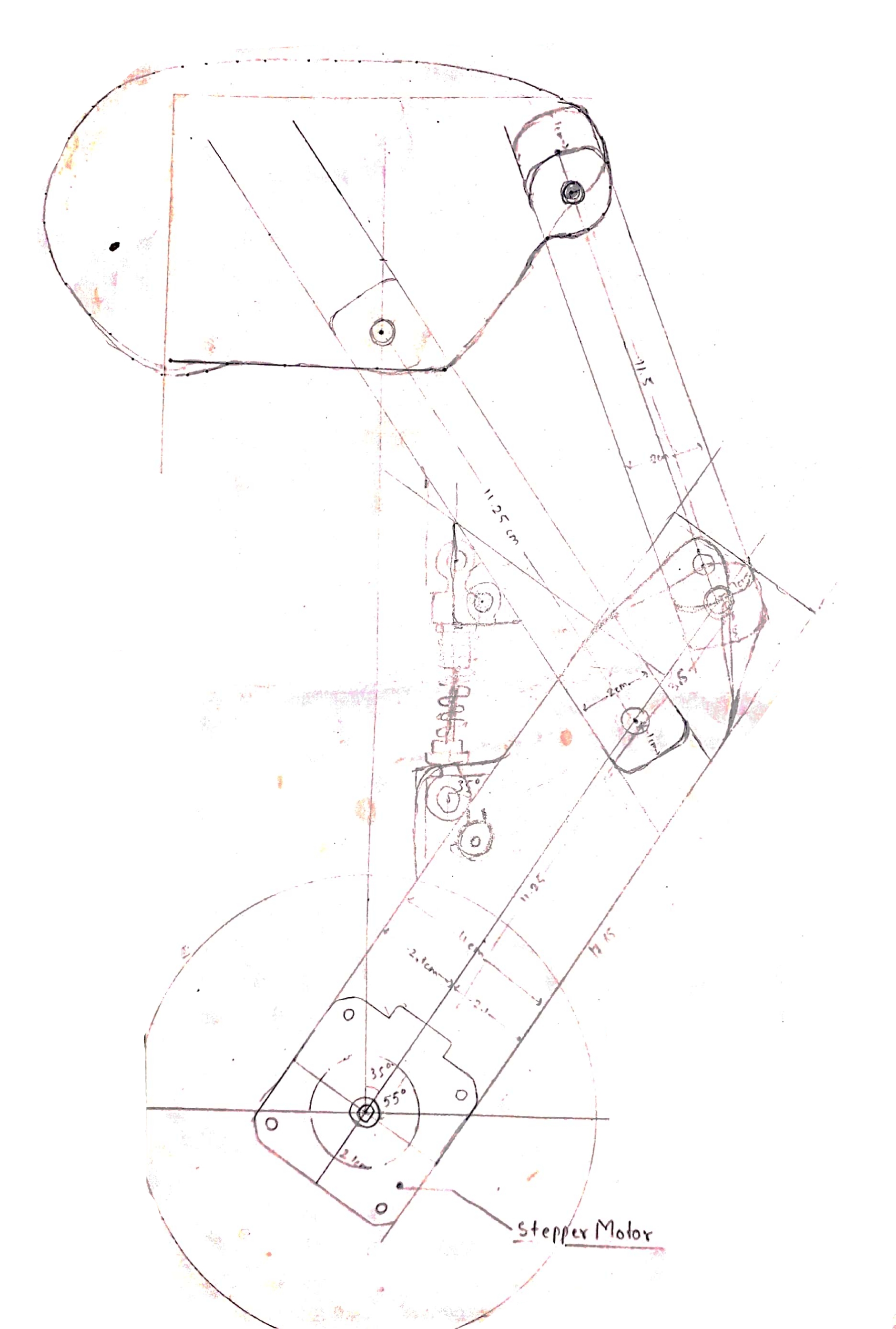 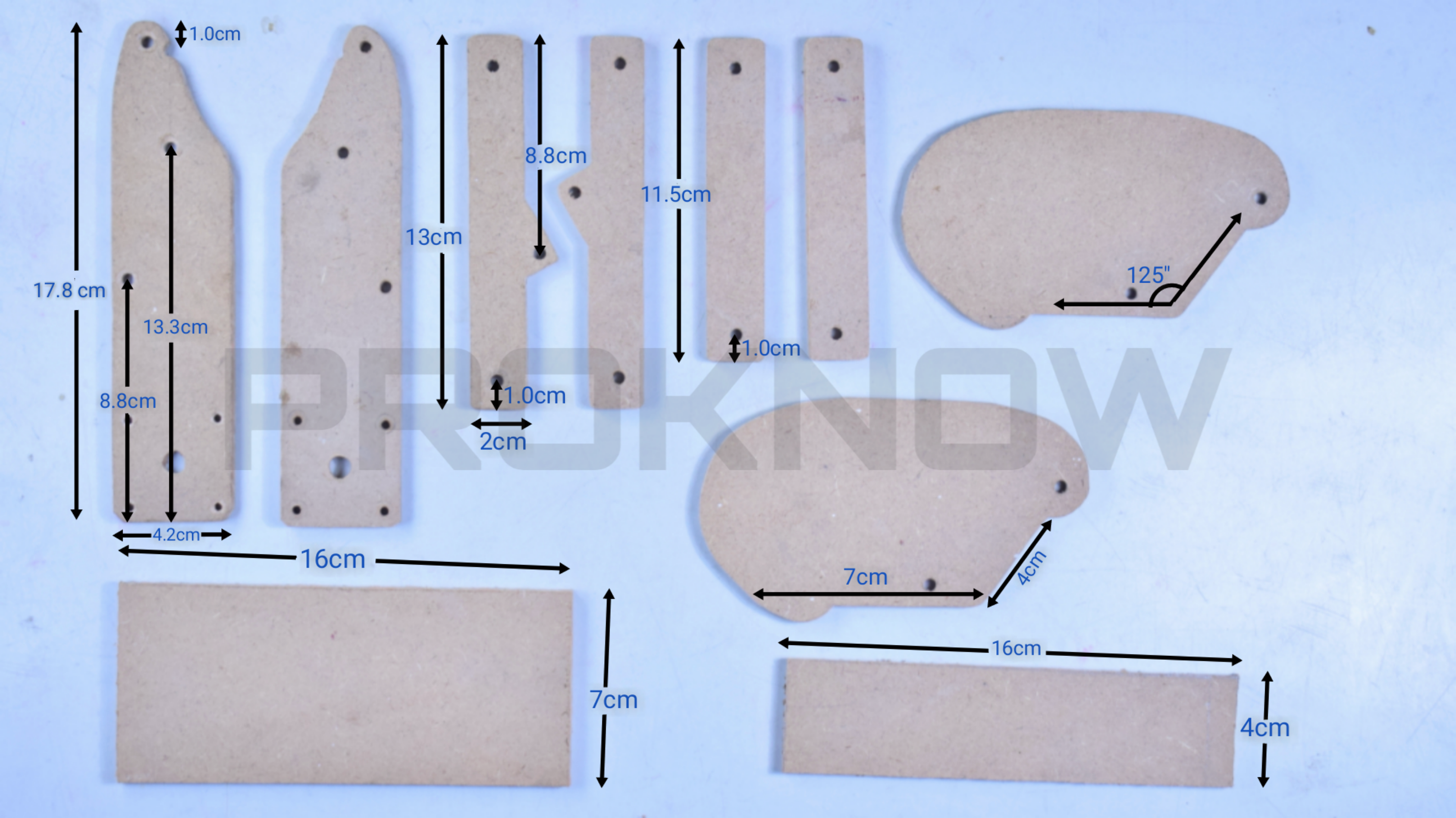 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






