|
24835| 25
|
[建造日志] 关于自己单牙滚筒的设计过程分享 |

设计未完成草图镇楼:lol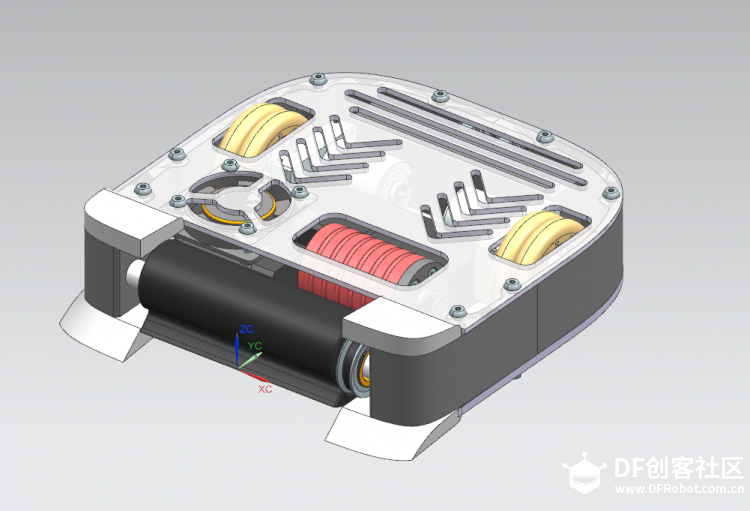 这次参加机器人格斗大赛,我选择的机器人类型为结构非常紧凑的滚筒型格斗机器人,武器类型为深单齿型滚筒,因为也是第一次参赛,没有任何经验,就自己简单的理解对单牙滚筒的设计思路及过程做一下阐述,如有不对的地方,希望各位大神批评指出,我会一个一个更改,争取下次设计处比较好的深齿型单牙滚筒。 首先,就我自己的理解来说,滚筒型机器人,最牛逼的除了结构稳定耐揍以外,最大的特点就是他的武器———“上勾拳”。 要想获得足够的效果,我觉得至少得满足下面这两个条件。 第一,咬的深 齿的咬入位置尽量要深点,这样能够保证更加容易的咬入对手的底盘,将他掀翻!尤其对于我这样的小型滚筒来说,转动半径比较小,要想获得比较大的线速度,只能通过提高转速,也就是角速度来获得,但是,更快的角速度并不一定是个好的事情,假设我的车子,移动速度为1.3m/s, 我的滚筒的转速为2000r/Min (33.33r/S)时,对手静止不动,当我发起进攻,单牙转鼓每旋转一圈的时间内,机器只能前进3.9MM ((1.3/33.33) 。也就是说,我的单牙每次攻击时候,且转速在2000转的时候,咬合深度最大为3.9MM/r 越快的角速度代表着越少的咬合深度,要掀翻对手,就必须得有足够的咬合深度,咬合深度浅,就达不到一击致命的效果,顶多就是个小锯刀而已,所以咬合深度一定要深。 第二,站的稳 转筒在高速旋转的时候整体得稳,对于高速旋转的大质量物体来说,稍微的动平衡没做好可能都会导致很大的震动。这样很有可能不战而败。 根据上面的分析,我需要尽量的将齿数减少,所以我将滚筒设计为单齿,并将齿的咬合深度尽量预留深一点,具体经验估计还是需要参加几次比赛后才能获得,滚筒的设计最简便的方法是用三维软件辅助,这样的效率是非常高的,否则对于毫无机械知识基础的人来说,设计这个简直就是灾难。 我比较熟悉的三维设计软件是NX UG,下面我就用分享一下UG设计滚筒的过程。 (不同软件设计界面可能不太一致,不过应该大同小异,原理差不多。) 1,草绘插入螺线线,圈数为一圈,终止值(旋转直径的最大值)为设定值,最小值为起始值(开始值),差值为牙的最大咬入深度,我这里尽量取个大点的值,方便后期调整空间。 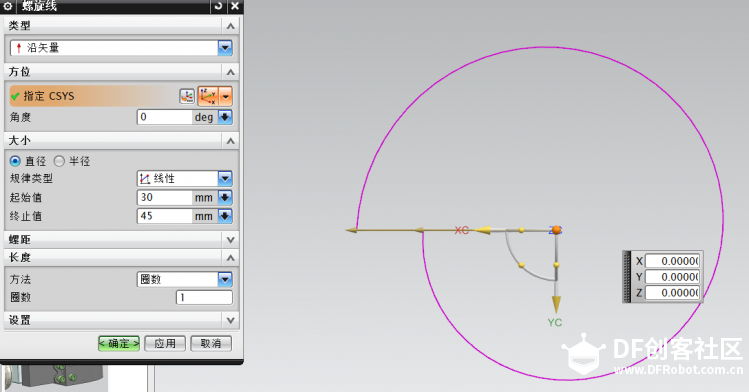 2.将螺旋线曲线用直线封闭, 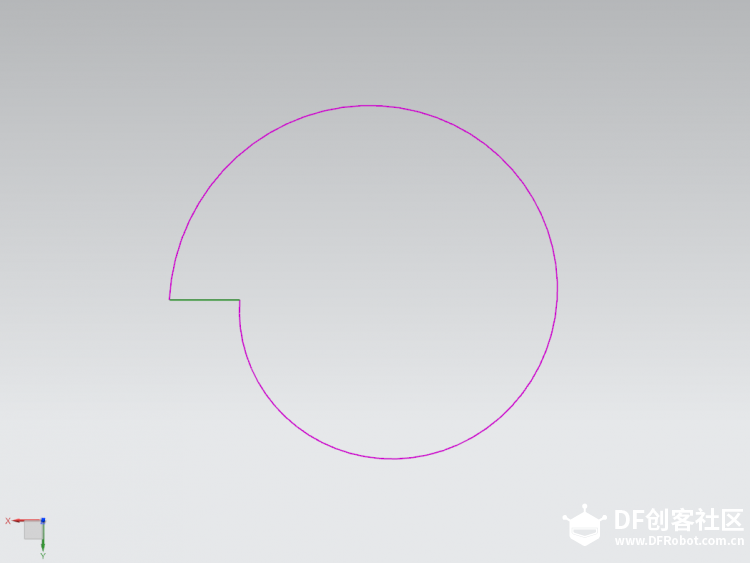 3,拉伸至需要的长度 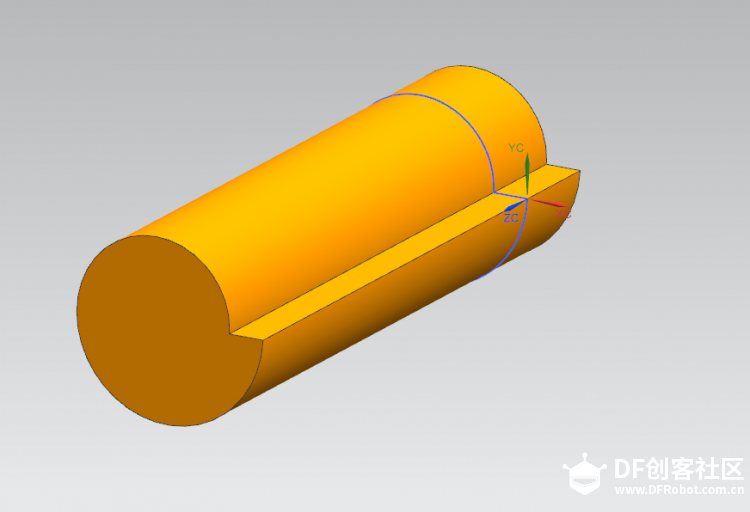 4,找出大致的中心位置 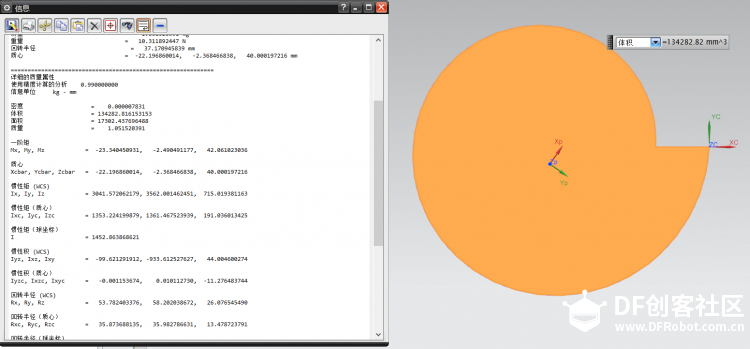 5,确定轴承孔大小后沿中心位置均匀掏空 此类滚筒最简单便宜的方式为线切割加工。所以需要做通孔,并在所有转角处倒角,避免应力集中将滚筒撕裂)PS:如果滚筒比较长,建议分为多断后线切割,由于工艺问题,较长的滚筒直接线切割会在滚筒端面弹线,导致加工出来不是一个很直的孔,影响动平衡。  6.掏空后再次用软件分析滚筒的中心位置,在中心孔位置掏出轴承孔,大小根据实际轴承大小设置,因为掏空的轴承孔在滚筒重心轴线上,孔大小并不会影响动平衡,可以实时调整。 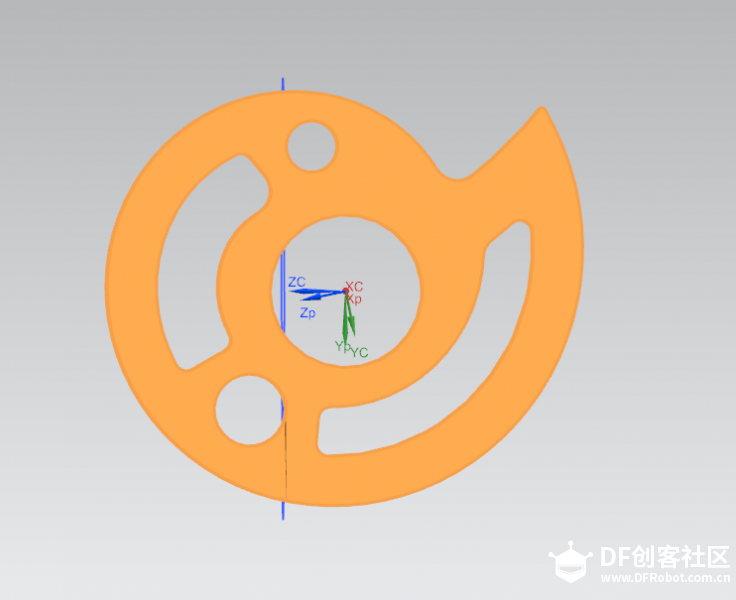 软件模拟滚筒旋转(这个仅仅为了好玩),我后续又做过受力分析,确保不会因为过度掏空或者设计不当导致攻击时爆裂 打印薄片做动平衡测试(9万转未有明显的不平衡) 测试通过,打印整体,由于整体机器未完成,暂时未测试   具体一些细节再更,明天回上海,要早点休息了! |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶