|
942| 3
|
[项目] 【花雕动手做】CanMV K230 AI 视觉模块之绘制关键点图框 |
 什么是 CanMV K230? CanMV K230是一款高性价比的RISC-V边缘AI平台,凭借低功耗、强视觉处理能力和开放的开发生态,成为嵌入式AI开发的理想选择,尤其适合需要快速部署视觉与AI功能的创客、中小企业及教育场景。CanMV 是一套 AI 视觉开发平台,K230 是其核心芯片。该模块结合了图像采集、AI推理、边缘计算等能力,适合嵌入式视觉应用开发。 CanMV:类似 OpenMV 的图像处理框架,支持 Python 编程,简化视觉识别开发流程。 K230 芯片:嘉楠科技推出的 AIoT SoC,采用 RISC-V 架构,内置第三代 KPU(AI加速单元),算力高达 6 TOPS,性能是 K210 的 13.7 倍。  |
|
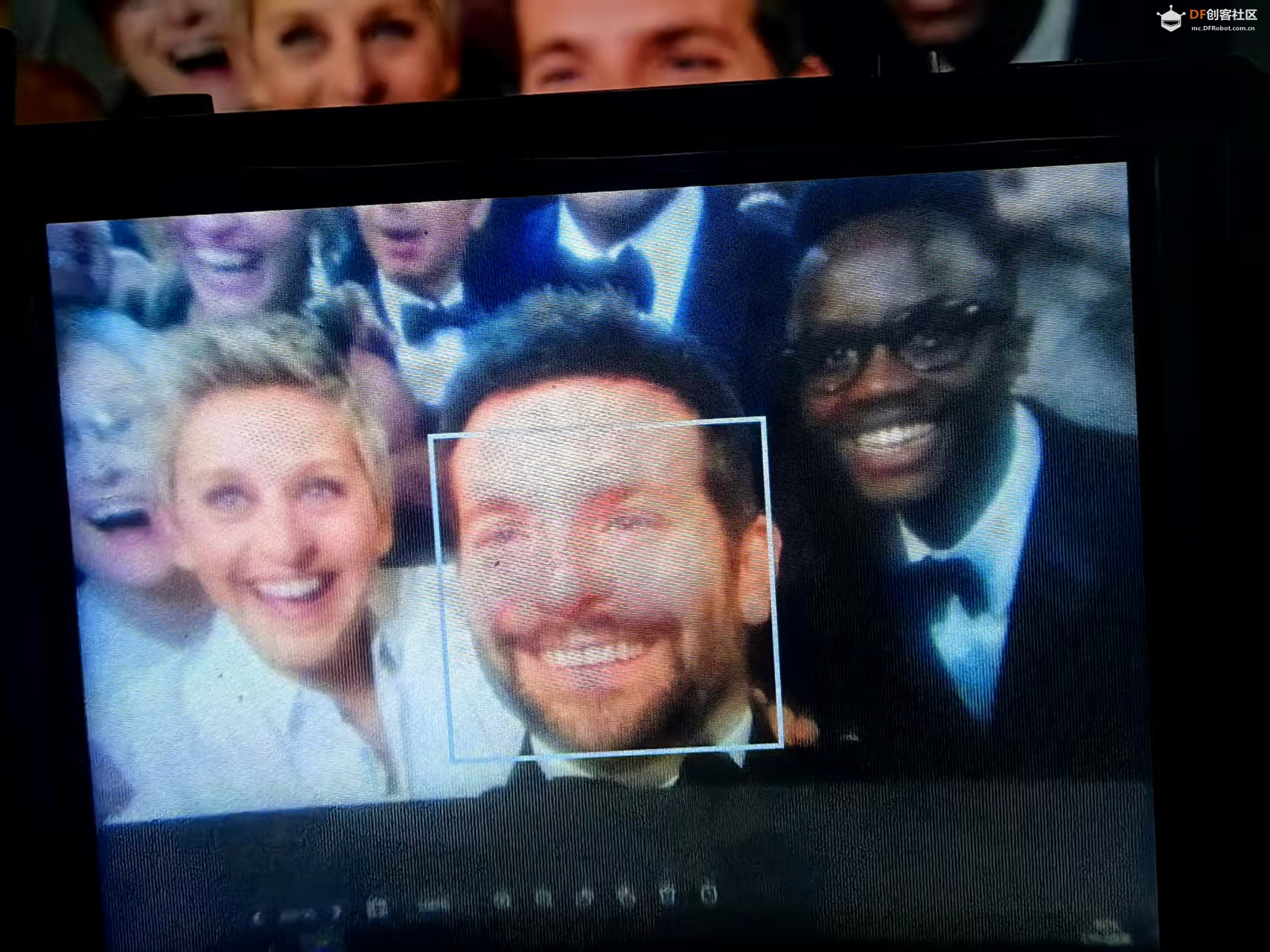
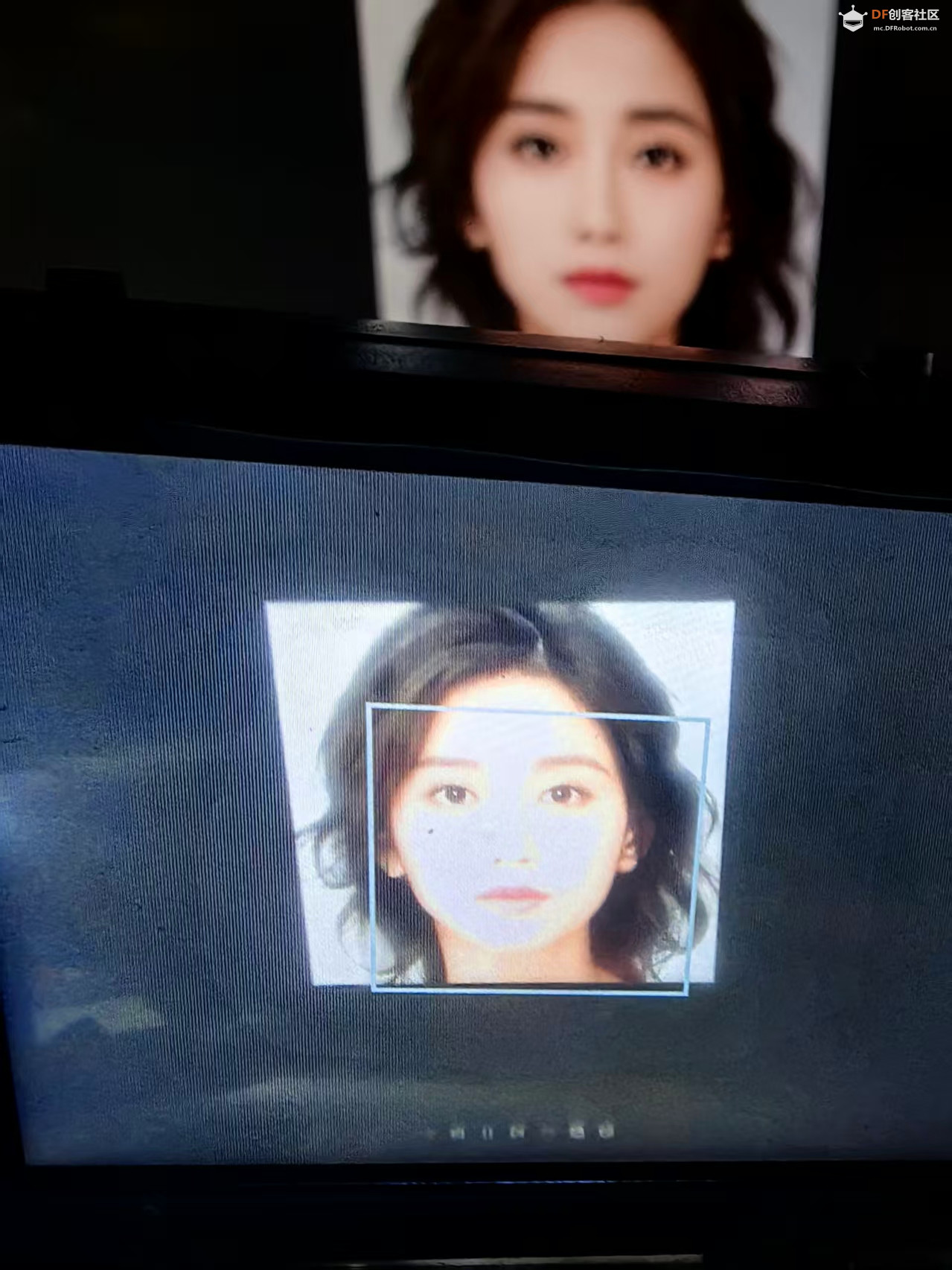
绘制关键点的draw_keypoints方法 1、什么是关键点? 这里的关键点(keypoints)是指图像中的特征点,通常是图像中比较显著或者独特的点,具体来说: 2、特征点的特性: 这些点通常是图像中的角点、边缘交叉点等具有显著特征的位置 它们在图像的不同视角下都容易被识别 这些点的周围像素值变化较大,使其具有独特性 实际应用中的关键点可能是: 3、物体的角点 纹理丰富区域的特征点 图案中的显著交叉点 物体轮廓上的重要点 4、用途: 目标跟踪 物体识别 图像匹配 运动检测 由于寻找关键点对性能消耗较大,所以我们减少了识别的区域,只识别屏幕最中心的部分的关键点 5、寻找关键点 该函数从指定的 ROI 元组 (x, y, w, h) 中提取 ORB 关键点。您可以使用 image.match_descriptor 函数比较两组关键点以获取匹配区域。若未发现关键点,则返回 None。 roi 是感兴趣区域的矩形元组 (x, y, w, h)。若未指定,默认 ROI 为整个图像。操作范围仅限于该区域内的像素。 threshold 控制提取关键点的数量(取值范围为 0-255)。对于默认的 AGAST 角点检测器,该值应设为约 20;对于 FAST 角点检测器,该值应设为约 60 至 80。阈值越低,提取的角点越多。 normalized 是布尔值。若为 True,则在多分辨率下关闭关键点提取。若您不关心处理扩展问题,且希望算法运行更快,则将其设置为 True。 scale_factor 是一个大于 1.0 的浮点数。较高的比例因子运行速度较快,但图像匹配效果相对较差。理想值介于 1.35 和 1.5 之间。 max_keypoints 是关键点对象能够容纳的最大关键点数量。若关键点对象过大导致内存问题,请适当降低该值。 corner_detector 是提取关键点所使用的角点检测器算法。可选值为 image.CORNER_FAST 或 image.CORNER_AGAST。FAST 角点检测器速度较快,但准确度较低。 注意: 此方法仅支持灰度图像。 6、绘制关键点 在图像上绘制特征点。 color:指定颜色,适用于灰度或 RGB565 图像。默认为白色。对于灰度图像,可以传递灰度值(0-255);对于 RGB565 图像,可以传递反向字节序的 RGB565 值。 size:控制特征点的大小。 thickness:控制线条的粗细(以像素为单位)。 fill:如果为 True,则填充特征点。 返回图像对象,以便后续方法可以链式调用。 该方法不支持压缩图像和 Bayer 格式图像 7、项目测试实验代码 |
|
解读这段CanMV K230关键点检测代码的技术细节和实现原理: 整体架构分析 1. 双通道并行处理架构 python 技术优势: 性能优化:灰度图像处理计算量仅为彩色图像的1/3 实时性保证:算法处理和显示渲染并行进行 资源利用:充分利用硬件多通道能力 核心技术深度解析 1. 关键点检测算法原理 find_keypoints() 方法底层可能使用的算法: python ORB特征点检测流程: text 1. oFast角点检测 └── 构建图像金字塔 └── 多尺度角点检测 └── Harris角点响应计算 2. rBRIEF描述符计算 └── 方向归一化 └── 二进制描述符生成 └── 特征点排序和筛选 2. 参数调优分析 python  3. ROI技术实现原理 python 计算量对比: 全图检测:640×480 = 307,200 像素 ROI检测:200×200 = 40,000 像素 性能提升:约87%的计算量减少 图像处理流水线分析 1. 数据流架构 text 摄像头传感器 ↓ 双通道输出 ├── 通道0 (GRAYSCALE) → 特征检测 → 关键点坐标 └── 通道1 (RGB565) → 显示渲染 ← 绘制关键点 ↓ 显示输出 2. 内存管理策略 python 算法性能优化技术 1. 图像金字塔优化 python 2. 非极大值抑制(NMS) python 实际应用场景扩展 1. 实时目标跟踪 python 2. 视觉里程计 python 错误处理和鲁棒性分析 1. 异常处理机制 python 2. 算法鲁棒性考虑 python 性能基准测试 根据代码参数估算性能: 处理分辨率:200×200 ROI 特征点数量:最多30个 预计帧率:15-30 FPS(取决于硬件) 内存占用:约900KB图像缓冲区 + 算法临时内存 技术总结 这段关键点检测代码展示了: 嵌入式视觉系统设计:双通道并行处理架构 实时算法优化:ROI限制、参数调优、内存管理 计算机视觉基础:特征点检测算法原理 系统集成能力:摄像头、显示、算法的协同工作 工程实践:异常处理、资源管理、性能考量 这是一个典型的嵌入式计算机视觉应用,为更复杂的目标识别、SLAM、AR等应用提供了基础技术支撑。代码在性能、功能和可维护性之间取得了很好的平衡。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶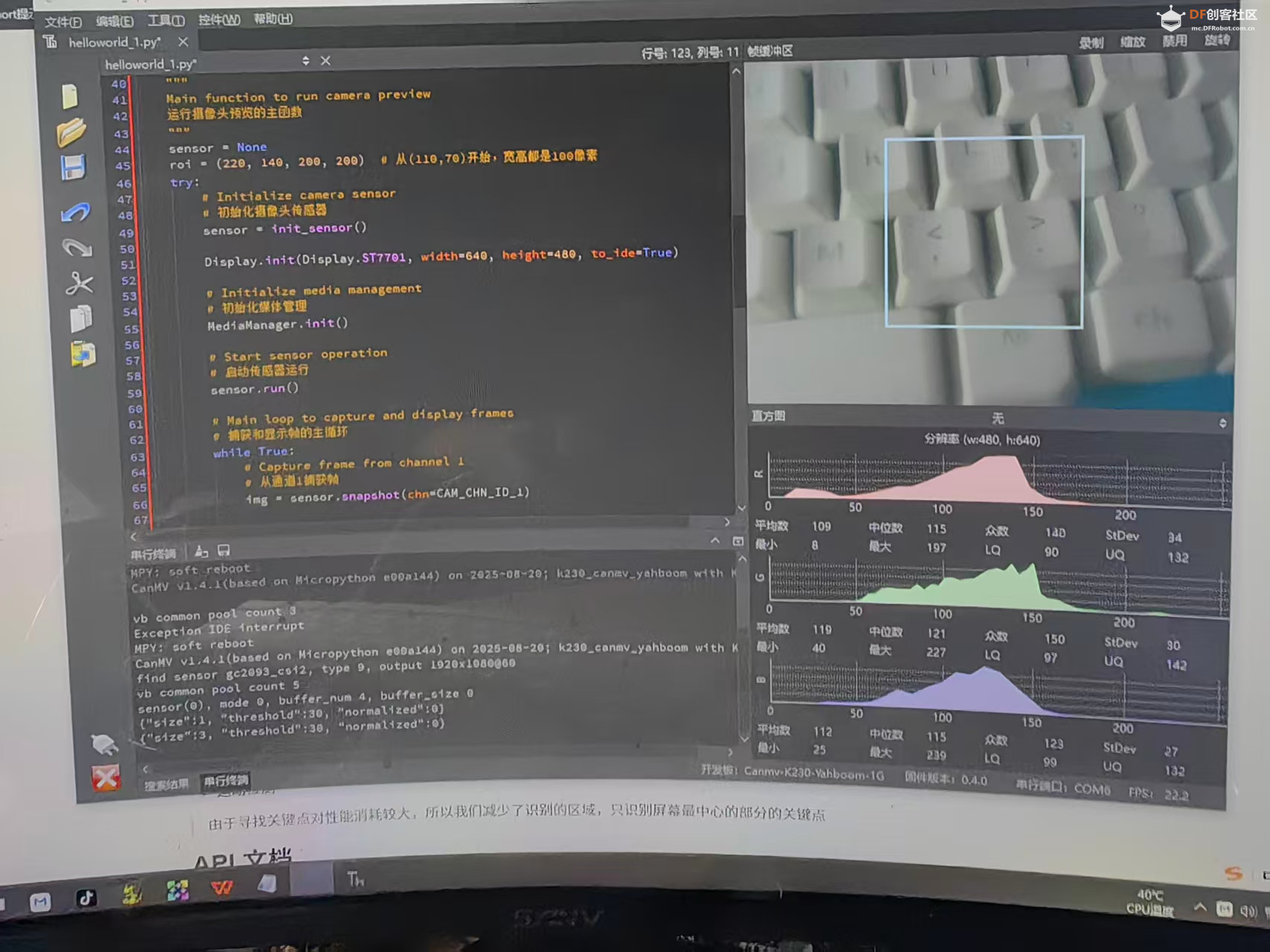


 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






