|
1460| 4
|
[项目] 【花雕动手做】CanMV K230 AI 视觉识别模块之圆形检测 |
 什么是 CanMV K230? CanMV K230是一款高性价比的RISC-V边缘AI平台,凭借低功耗、强视觉处理能力和开放的开发生态,成为嵌入式AI开发的理想选择,尤其适合需要快速部署视觉与AI功能的创客、中小企业及教育场景。CanMV 是一套 AI 视觉开发平台,K230 是其核心芯片。该模块结合了图像采集、AI推理、边缘计算等能力,适合嵌入式视觉应用开发。 CanMV:类似 OpenMV 的图像处理框架,支持 Python 编程,简化视觉识别开发流程。 K230 芯片:嘉楠科技推出的 AIoT SoC,采用 RISC-V 架构,内置第三代 KPU(AI加速单元),算力高达 6 TOPS,性能是 K210 的 13.7 倍。  |
|
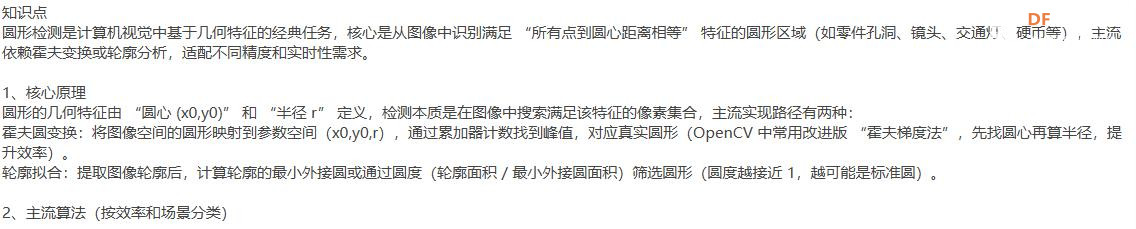
知识点 圆形检测是计算机视觉中基于几何特征的经典任务,核心是从图像中识别满足 “所有点到圆心距离相等” 特征的圆形区域(如零件孔洞、镜头、交通灯、硬币等),主流依赖霍夫变换或轮廓分析,适配不同精度和实时性需求。 1、核心原理 圆形的几何特征由 “圆心 (x0,y0)” 和 “半径 r” 定义,检测本质是在图像中搜索满足该特征的像素集合,主流实现路径有两种: 霍夫圆变换:将图像空间的圆形映射到参数空间(x0,y0,r),通过累加器计数找到峰值,对应真实圆形(OpenCV 中常用改进版 “霍夫梯度法”,先找圆心再算半径,提升效率)。 轮廓拟合:提取图像轮廓后,计算轮廓的最小外接圆或通过圆度(轮廓面积 / 最小外接圆面积)筛选圆形(圆度越接近 1,越可能是标准圆)。 2、主流算法(按效率和场景分类)  3、实操示例(OpenCV 霍夫梯度法实现) 适合标准圆形检测,适配多数场景,可直接替换为 K230 摄像头采集帧: python 4、关键优化技巧(提升检测准确率) 预处理强化: 降噪优先:用大核高斯模糊(如 (9,9)、(11,11))或中值滤波,抑制噪声导致的假圆。 增强对比度:对暗图像用直方图均衡化,突出圆形边缘;对复杂背景用阈值分割(如二值化),分离前景圆形。 参数调优(霍夫变换核心): dp:设为 1.2~1.5,平衡速度和精度;minDist 大于圆形直径的 1/2,避免重复检测。 param2:根据图像调整(30~50),值越大检测越严格,假圆越少但可能漏检小圆。 minRadius/maxRadius:根据目标圆形尺寸范围设置,过滤超出范围的噪声圆。 后处理筛选: 圆度验证:对检测到的圆,提取其轮廓计算圆度(需先通过圆心和半径裁剪轮廓),圆度<0.8 则过滤(非标准圆)。 面积过滤:计算圆形区域的实际面积,与理论面积(πr²)偏差过大则剔除(如椭圆、不规则图形)。 边缘设备适配: K230 平台:先用 NPU 加速高斯模糊和 Canny 边缘检测,再用 CPU 运行霍夫变换,降低延迟;或部署轻量化深度学习模型(如 MobileNet + 圆回归),单帧处理延迟可控制在 80ms 内。 5、典型应用场景 工业质检:检测零件的圆形孔洞(如螺丝孔、轴承内圈)是否合格(半径是否达标、是否偏心)。 智能交通:识别交通灯、圆形交通标志(如禁止通行标志)。 机器人视觉:定位圆形物体(如瓶盖、球体),规划抓取路径。 医疗影像:提取 CT/MRI 图像中的圆形病灶(如肿瘤、血管截面)。    |
  3、实操示例(OpenCV 霍夫梯度法实现) 适合标准圆形检测,适配多数场景,可直接替换为 K230 摄像头采集帧: python 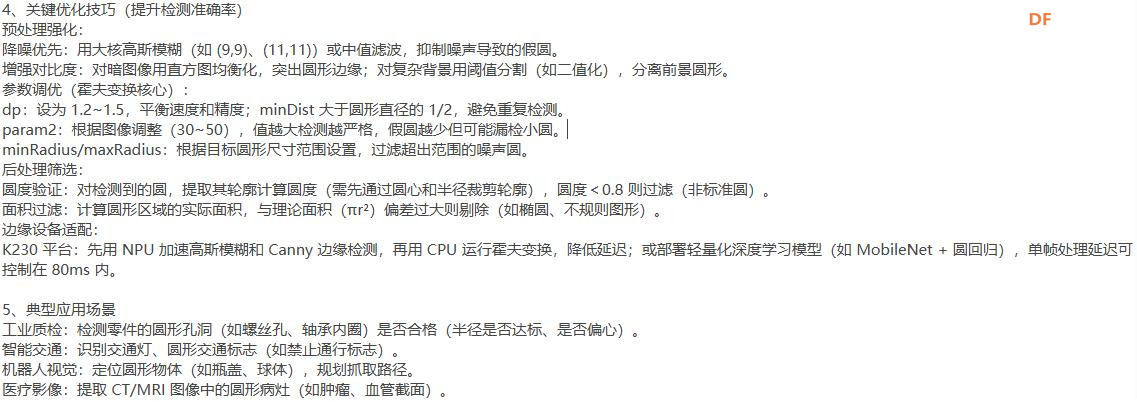    |
|
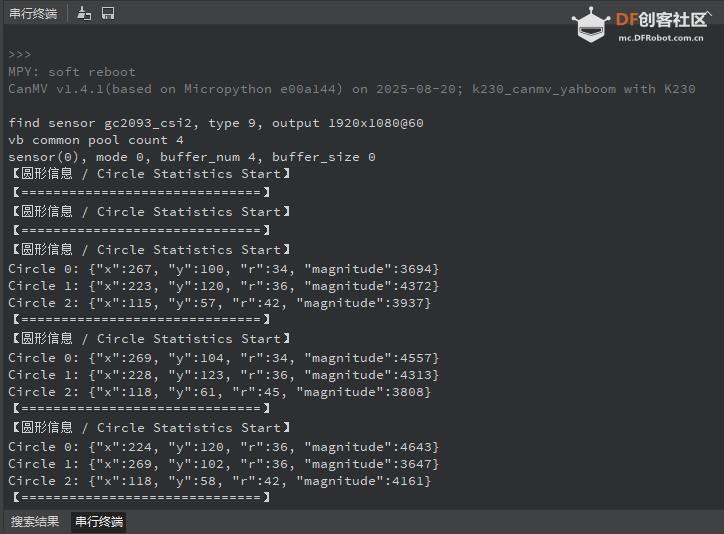
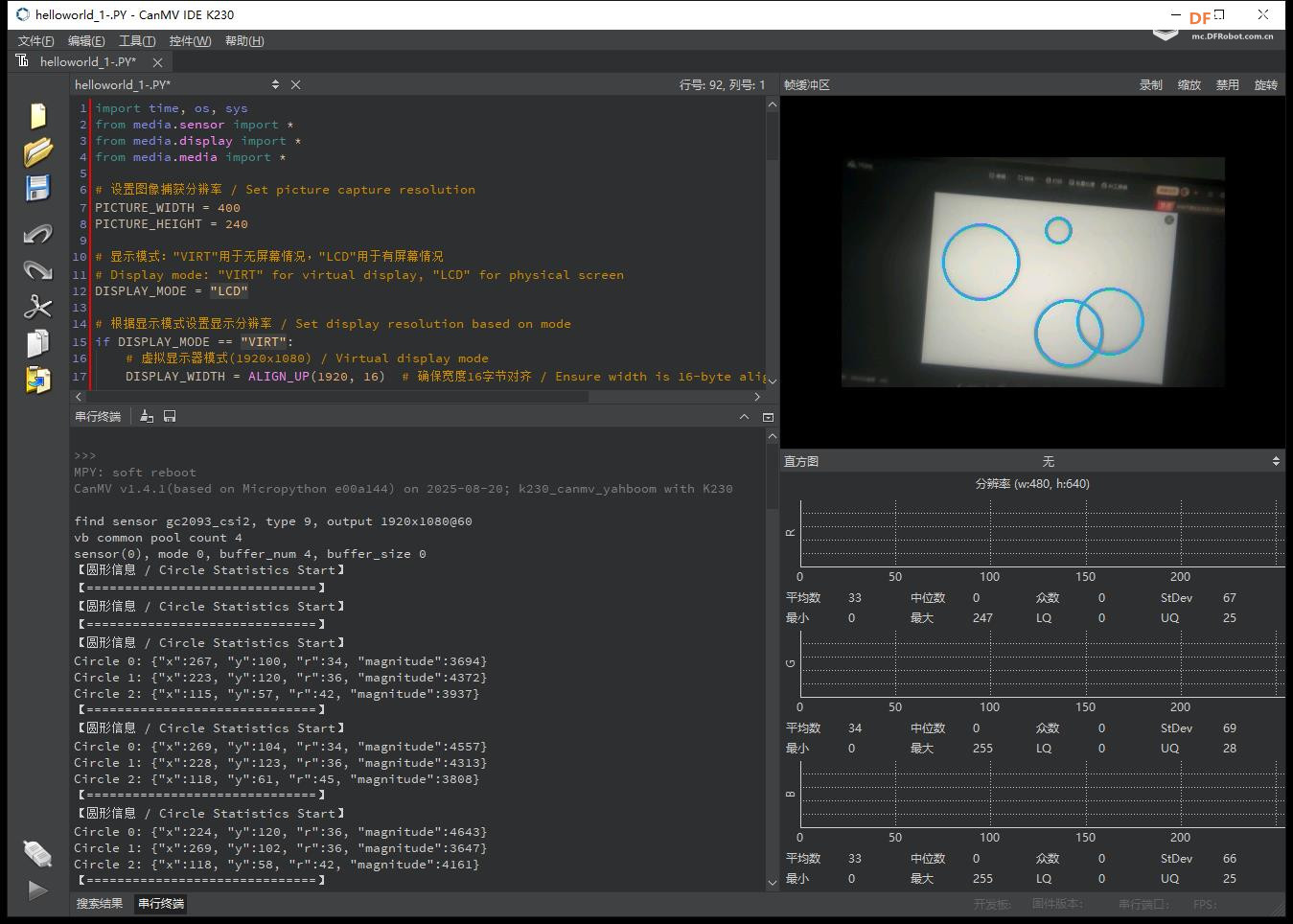
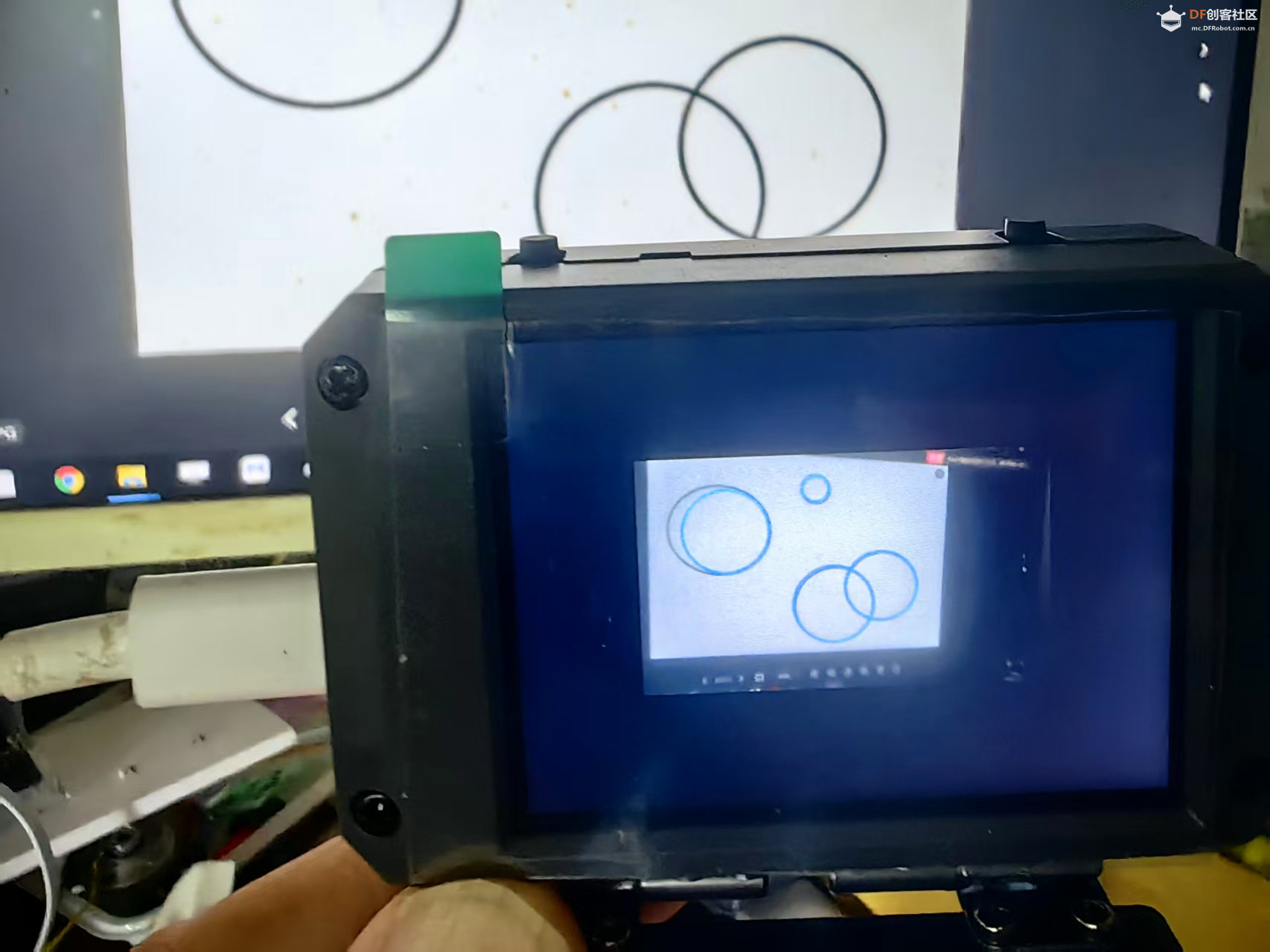
【花雕动手做】CanMV K230 AI 视觉识别模块之圆形检测 项目测试实验代码 代码解读 程序总体功能 这是一个基于CanMV K230的实时圆形检测系统,能够在视频流中实时识别图像中的圆形轮廓,并用可视化的方式标记出来。 系统架构设计 核心处理流程 text 摄像头采集(400×240) → 霍夫圆变换检测 → 圆形轮廓绘制 → 居中显示(640×480) → 控制台输出 1. 智能分辨率策略 python 设计理念分析: 处理分辨率:400×240(96,000像素) 相比640×480,计算量减少约60% 在检测精度和 processing 速度间取得最佳平衡 显示分辨率:640×480 提供清晰的视觉输出 居中显示保持良好用户体验 核心技术组件详解 1. 多显示模式架构 python 双模式设计: LCD模式:物理屏幕显示 + IDE调试输出 VIRT模式:1920×1080虚拟显示,适合无屏幕开发环境 内存对齐优化:ALIGN_UP(1920, 16) 提升内存访问效率 2. 霍夫圆变换算法 python 算法深度解析: 霍夫圆变换原理: 在参数空间 (x, y, radius) 中寻找圆形 每个边缘像素为可能的圆心和半径投票 通过累加器寻找局部最大值 阈值参数作用: threshold=3500:累加器阈值 高阈值:只检测轮廓清晰、证据充分的圆形 低阈值:检测更多圆形,但可能包含噪声和误检 3. 传感器初始化流程 python 关键技术点: RGB565格式:16位彩色,相比RGB888节省33%内存 通道管理:使用CAM_CHN_ID_0通道进行图像采集 硬件优化:充分利用K230的专用图像处理单元 性能优化策略 1. 计算复杂度优化 text 原始处理:640 × 480 = 307,200 像素 优化处理:400 × 240 = 96,000 像素 计算量减少:68.75% 2. 内存访问优化 python 对齐内存访问,提高DMA传输效率 减少内存碎片和访问冲突 3. 居中显示算法 python 自动适应不同分辨率组合 保持图像在显示中心位置 算法工作流程 主循环执行序列 图像捕获:从摄像头获取400×240分辨率帧 圆形检测:运行霍夫圆变换算法查找圆形 可视化绘制:为每个检测到的圆形绘制蓝色轮廓 信息输出:打印圆形详细信息到控制台 居中显示:将处理后的图像居中显示在屏幕上 霍夫圆变换详细流程 text 原始图像 → 边缘检测 → 梯度计算 → 参数空间累加 → 峰值检测 → 阈值筛选 → 圆形输出 可视化与用户交互 视觉渲染系统 python 视觉设计分析: 颜色选择:天蓝色(40,167,225) 醒目但不刺眼 与常见背景形成良好对比 线宽设计:3像素厚度 确保轮廓清晰可见 不过度遮挡原始图像 控制台信息输出 text 【圆形信息 / Circle Statistics Start】 Circle 0: (x=120, y=80, radius=25) 【==============================】 信息内容: 圆形中心坐标 (x, y) 圆形半径 (radius) 圆形完整几何信息 中英双语支持,便于国际化使用 异常处理与资源管理 三级保护机制 python 资源释放顺序 停止传感器:sensor.stop() 关闭显示:Display.deinit() 系统睡眠:os.exitpoint(os.EXITPOINT_ENABLE_SLEEP) 释放媒体资源:MediaManager.deinit() 延时等待:time.sleep_ms(100) 确保完全释放 应用场景分析 工业视觉检测 零件定位:精密零件中的圆形孔洞定位 尺寸测量:圆形部件的直径和位置测量 质量检查:检测圆形特征的完整性和一致性 机器人导航 标记识别:圆形AR标记或导航信标识别 目标追踪:圆形物体的实时追踪定位 环境感知:识别环境中的圆形结构特征 安防监控 镜头检测:监控摄像头圆形镜头的识别 异常检测:圆形区域的入侵或变化检测 特征提取:场景中圆形特征的提取分析 医疗影像 细胞分析:圆形细胞结构的识别计数 病变检测:组织切片中的圆形病变区域 器械定位:圆形医疗设备的定位引导 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






