|
1271| 4
|
[项目] 【花雕动手做】CanMV K230 AI 视觉识别之快速线性回归 |
 什么是 CanMV K230? CanMV K230是一款高性价比的RISC-V边缘AI平台,凭借低功耗、强视觉处理能力和开放的开发生态,成为嵌入式AI开发的理想选择,尤其适合需要快速部署视觉与AI功能的创客、中小企业及教育场景。CanMV 是一套 AI 视觉开发平台,K230 是其核心芯片。该模块结合了图像采集、AI推理、边缘计算等能力,适合嵌入式视觉应用开发。 CanMV:类似 OpenMV 的图像处理框架,支持 Python 编程,简化视觉识别开发流程。 K230 芯片:嘉楠科技推出的 AIoT SoC,采用 RISC-V 架构,内置第三代 KPU(AI加速单元),算力高达 6 TOPS,性能是 K210 的 13.7 倍。  |
|
知识点 巡线任务中,快速线性回归是核心技术,能从摄像头采集的道路标线(如黑色赛道上的白色线段)中,实时拟合出直线方程,为设备(机器人、小车)提供行驶方向指引,核心是 “快速计算 + 抗干扰”。核心结论:巡线场景的快速线性回归,优先用最小二乘法(计算简单、速度快),配合 “感兴趣区域(ROI)提取 + 坐标预处理”,可在毫秒级完成拟合,适配 K230 等边缘设备。 1、核心原理(巡线场景适配版) 巡线的本质是拟合 “标线的中心线”,输入是标线上的像素坐标(x,y),输出是直线方程 y = kx + b(或 ax + by + c = 0),最小二乘法通过最小化 “所有像素到直线的距离平方和”,求解最优参数 k(斜率)和 b(截距)。 2、关键简化(提升速度) 坐标转换:将图像坐标系(原点在左上角,y 向下)转换为 “车辆坐标系”(原点在车辆中心,y 向前),减少后续方向计算的复杂度。 ROI 提取:只处理图像下方的感兴趣区域(如底部 1/3 区域,即车辆前方最近的标线),过滤无关背景像素,减少计算量。 数据筛选:只保留标线上的像素(如白色标线用阈值分割提取,得到二值图中的白色像素坐标),避免杂点干扰。 3、快速实现步骤(巡线专属) 图像预处理:采集图像→灰度化→阈值分割(提取标线)→ROI 裁剪(只留前方区域)→得到标线像素坐标集合 (x1,y1), (x2,y2), ..., (xn,yn)。 线性回归计算(最小二乘法核心公式): 计算均值:x_mean = (x1+x2+...+xn)/n,y_mean = (y1+y2+...+yn)/n 计算分子分母: 分子 sum_xy = Σ(xi - x_mean)(yi - y_mean)(协方差和) 分母 sum_xx = Σ(xi - x_mean)²(x 的方差和) 求解参数:k = sum_xy / sum_xx(斜率),b = y_mean - k*x_mean(截距) 方向决策:根据斜率 k 判断标线偏移方向(如 k=0 为直行,k>0 向左偏,k<0 向右偏),输出转向控制信号。 4、巡线场景优化技巧(抗干扰 + 提速度) 数据去噪: 过滤孤立像素:只保留相邻像素数大于 5 的连通区域,剔除单点噪声。 异常值剔除:计算所有像素到初始拟合直线的距离,剔除距离过大的异常点(如超出 3 倍标准差),重新拟合。 速度优化: 减少计算量:ROI 区域设为 320x120(小尺寸),像素数控制在 1 万以内,单帧计算耗时 < 1ms。 硬件加速:在 K230 上,用 NPU 加速阈值分割和 ROI 提取,CPU 只负责回归计算,进一步降低延迟。 鲁棒性增强: 滑动窗口拟合:用最近 3 帧的拟合结果做滑动平均(如 k_final = (k1+2k2+3k3)/6),避免单帧噪声导致的方向突变。 多线段拟合:若标线断裂,分多个 ROI 分别拟合,取主要线段的斜率作为决策依据。 5、实操示例(Python+OpenCV,适配巡线) python 6、K230 平台适配要点 性能优化:将 Python 代码转为 C/C++(K230 SDK 支持),单帧拟合耗时可降至 0.5ms 内,满足实时巡线需求(≥30fps)。 硬件协同:用 K230 的 ISP 模块预处理图像(自动曝光、降噪),NPU 加速阈值分割和 ROI 提取,CPU 专注回归计算。 接口适配:拟合结果(k,b)可直接通过 UART 或 GPIO 输出给电机控制模块,实现 “检测 - 决策 - 控制” 闭环。   |
|
【花雕动手做】CanMV K230 AI 视觉识别模块之巡线基础:快速线性回归 项目测试实验代码 |
|
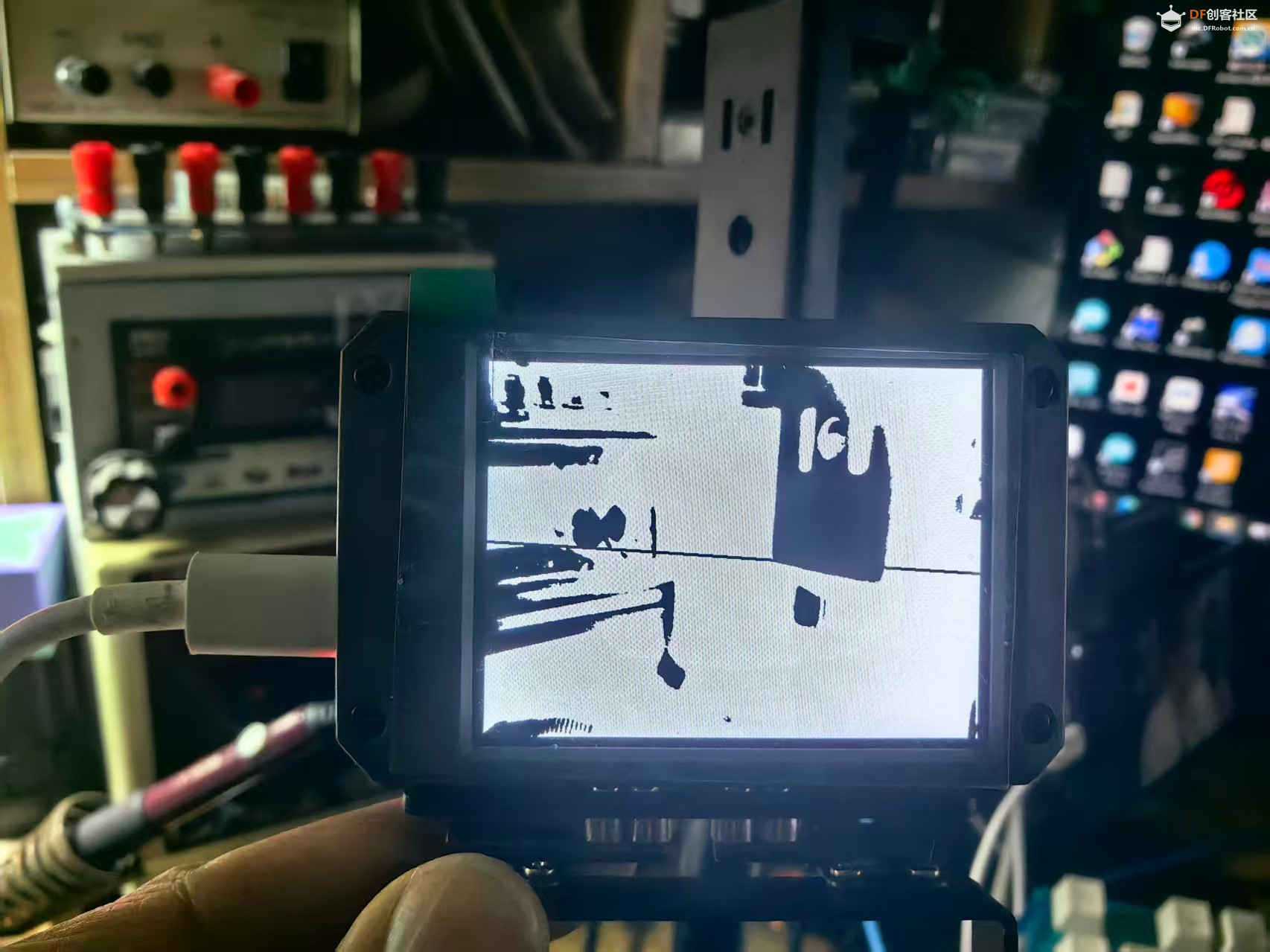
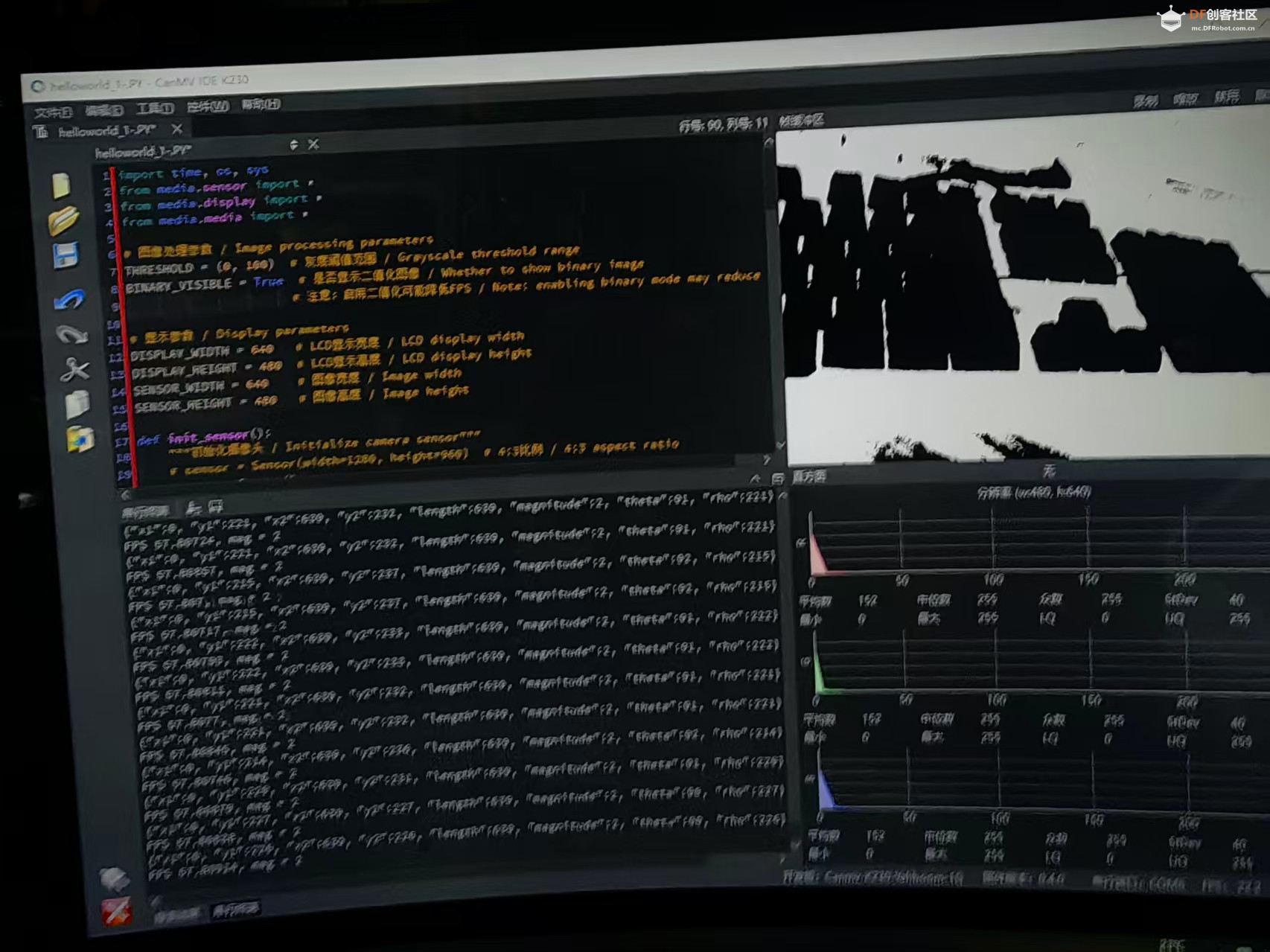
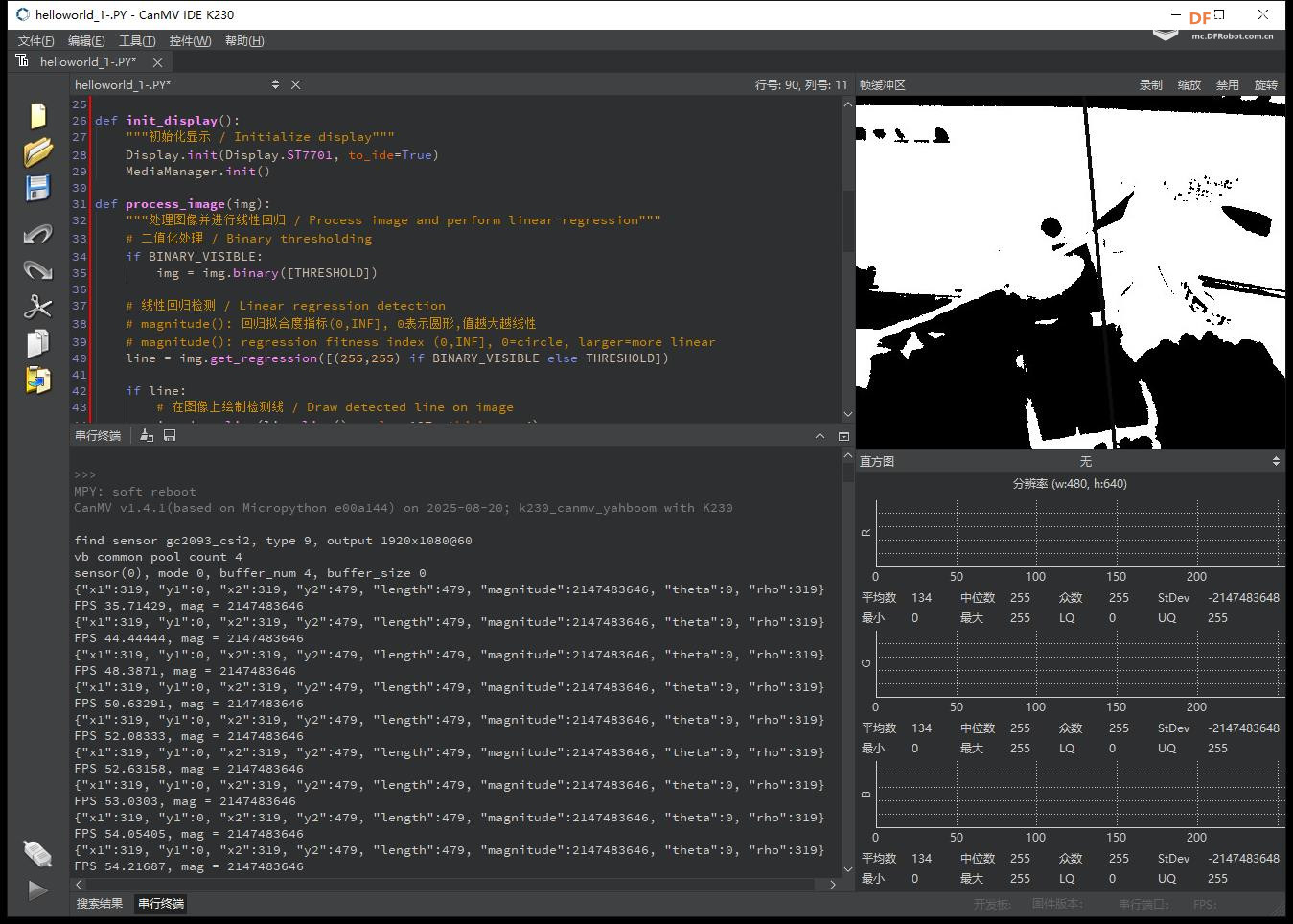
代码结构 图像获取和处理: 通过摄像头捕获640x480分辨率的灰度图像 可以选择是否对图像进行二值化处理(将灰度值在0-100范围内的像素转为白色) 线性回归检测: 对图像进行线性回归分析,寻找图像中的直线特征 计算回归线的拟合度(magnitude值),数值越大表示越接近直线 在检测到直线时,在图像上绘制这条线 显示功能: 使用LCD屏幕显示处理后的图像 图像在屏幕上居中显示 实时显示FPS(每秒帧数)和直线拟合度 程序结构: 初始化部分:设置摄像头参数、显示器和媒体管理器 主循环部分:不断捕获图像、处理、显示的过程 异常处理:包含完整的异常处理机制和资源清理 快速线性回归算法 对图像所有阈值像素进行线性回归计算。这一计算通过最小二乘法进行,通常速度较快,但不能处理任何异常值。 若 robust 为True,则将使用泰尔指数。泰尔指数计算图像中所有阈值像素间的所有斜率的中值。 若在阈值转换后设定太多像素,即使在80x60的图像上,这一N^2操作也可能将您的FPS降到5以下。 但是,只要阈值转换后的进行设置的像素数量较少,即使在超过30%的阈值像素为异常值的情况下,线性回归也依然有效。 这一方法返回的是一个 image.line 对象。 thresholds 必须是元组列表。 [(lo, hi), (lo, hi), …, (lo, hi)] 定义你想追踪的颜色范围。 对于灰度图像,每个元组需要包含两个值 - 最小灰度值和最大灰度值。 仅考虑落在这些阈值之间的像素区域。 对于RGB565图像,每个元组需要有六个值(l_lo,l_hi,a_lo,a_hi,b_lo,b_hi) - 分别是LAB L,A和B通道的最小值和最大值。 为方便使用,此功能将自动修复交换的最小值和最大值。 此外,如果元组大于六个值,则忽略其余值。相反,如果元组太短,则假定其余阈值处于最大范围。 注:除了快速线性回归算法以外,巡线还有其它可行的方案,我们需要根据实际情况去尽量选择最优的一种解决方案。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶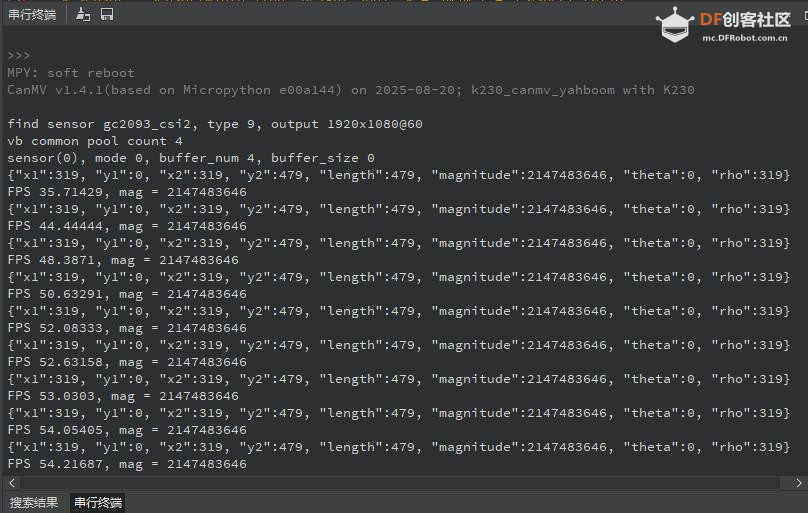


 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






