|
599| 3
|
[项目] 【花雕动手做】22mm全金属行星齿轮减速步进电机带霍尔 |

|
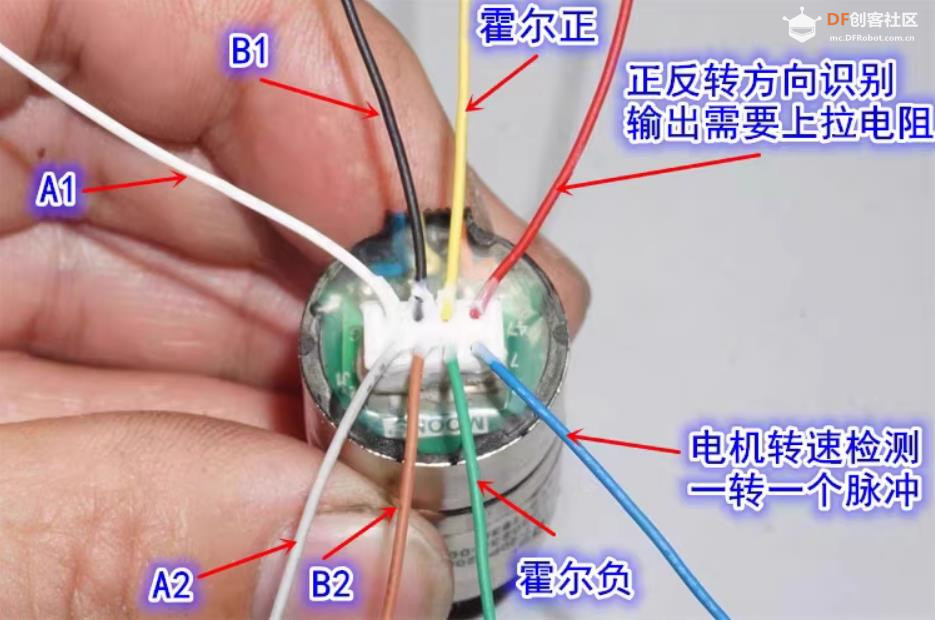
一、核心特性解析 1、动力核心:二相四线步进电机 型号:通常对应FL20STH或类似20mm机座号。 电气参数:相电阻6.5Ω,相电感约1.7mH。这表明电机额定电压较低(约3.9V-5V),必须使用恒流型步进驱动器(如A4988、DRV8825、TMC2209)进行驱动,若直接接电源会因电流过大而烧毁。 步距角:标准1.8°(200步/转)。结合减速比,输出轴步距角约为 1.8°/71.5 ≈ 0.0252°,理论定位精度极高。 2、传动机构:全金属行星齿轮减速箱 减速比:71.5:1。这是典型的增扭降速设计。电机端的理论扭矩被放大至约71.5倍(需扣除约10%-15%的传动效率损失)。 结构:全金属齿轮(通常为粉末冶金或钢制)耐磨损、抗冲击,寿命远超塑胶齿轮。双滚珠轴承支撑输出轴意味着该轴能承受较大的径向负载(通常可达50N以上)和轴向负载,适合直接连接同步带轮或齿轮,抗冲击能力强。 3、反馈系统:霍尔检测(Z相/零位) 功能:电机尾部安装有霍尔传感器,对应转子上装有一对磁极(N/S)。电机每旋转一圈,霍尔输出一个完整的方波脉冲(或一个低电平脉冲)。 用途:测速(通过脉冲频率计算转速)、测向(需配合正交编码器逻辑,单霍尔通常仅能测速,需结合驱动时序判断方向,或该型号为双霍尔正交输出)、零位归零(作为机械原点的绝对位置参考,用于上电初始化或消除步进电机累积误差)。 二、应用场景 1、移动机器人(AGV/AMR)舵轮驱动:利用其大扭矩(71.5倍放大)驱动重载小车,霍尔反馈用于里程计校准,防止因地面打滑导致的步进丢步累积误差。 2、精密云台/机械臂关节:全金属齿轮背隙小,双轴承抗抖动,适合高精度角度定位。 3、自动化设备中的高负载直线模组:替代部分伺服电机,在成本敏感且需要大推力的场景下使用。 三、使用注意事项 1、霍尔接口电路:霍尔输出端为集电极开路(OC)或开漏(OD)输出,必须外接上拉电阻(通常4.7kΩ-10kΩ至3.3V/5V),否则MCU无法读取到高电平信号。 2、启动与制动:由于减速比大,输出轴惯性负载被放大(71.5²倍)。启动时需设置较低的加速度,否则易导致电机失步;急停时因惯性大,可能产生较大的反向冲击电动势,建议驱动器启用缓停或机械刹车。 3、闭环控制逻辑:单霍尔只能提供“每转一个脉冲”的参考,无法实现高分辨率闭环(如编码器那样)。通常用于开环启动+闭环纠错模式:平时按步进脉冲运行,定期(如每转)检查霍尔信号是否对齐,若不对齐则微调步进脉冲进行位置补偿。 4、散热:全金属外壳散热好,但大扭矩持续堵转时,电机绕组发热仍较大,需监控温升。     |
|
这是一款拆机成色优秀的 22mm 微型 20 系列步进减速电机,采用全金属三级行星减速箱,搭配双滚珠轴承与霍尔方向 / 速度反馈,体积小、扭力大、精度高,非常适合精密控制、机器人关节、计数检测与各类 DIY 改装项目。 一、核心结构与参数 外径:22mm 电机类型:两相四线步进电机 减速结构:三级全金属行星齿轮减速 减速比:约 71.5:1 输出轴:双滚珠轴承支撑,轴径 4mm 扁轴 相电阻:约 7.5Ω 整机重量:约 78g 外观款式:共 2 款外观,功能与参数完全一致,具体以介绍图片对比为准 二、霍尔反馈功能(重点) 电机尾部自带霍尔检测模块 转子转盘上有 2 颗 NS 小磁铁 转一圈输出 1 个脉冲,可用于转速测量、计数、定位 支持旋转方向检测:方向不同输出高低电平不同 使用要求:方向检测脚需外接 10K 上拉电阻 才能正常工作 三、性能特点 拆机成色好,品质可靠,性价比高 全金属齿轮箱,耐磨、抗冲击、大扭力 双滚珠轴承输出轴,转动顺滑、精度高、寿命长 4mm 扁轴设计,安装传动更稳定,不易打滑 两相四线驱动,兼容常规步进驱动器 带霍尔反馈,可实现闭环控制、计数、方向判断,非常适合精密控制系统改装 四、适用场景 精密机械、小型机械臂、机器人关节、智能舵机改装 精密云台、阀门控制、医疗小型执行机构 需要转速 / 方向 / 计数检测的自动化改装项目 DIY 高精度定位、闭环调速、小体积大力矩动力装置 五、注意事项 霍尔方向检测引脚必须加 10K 上拉电阻 才能正常输出电平 适配两相四线步进驱动器,按 A+、A-、B+、B - 正确接线 安装时避免撞击输出轴,保护双滚珠轴承与减速齿轮   |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶



 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






