|
26130| 8
|
[讨论交流] Mind+模拟演示 PID控制(2) |
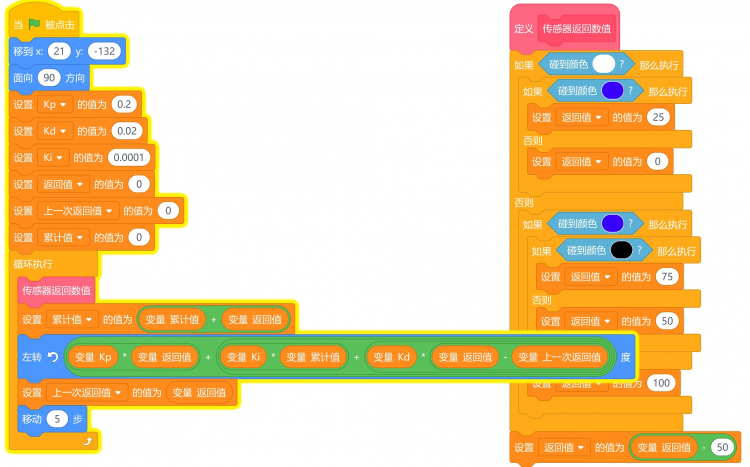 PID 算法,是控制理论中最常用、最经典的算法,在我们的生产和生活中应用的非常广泛。它并不是什么很神圣的东西,大家一定都见过 PID 的实际应用:比如四轴飞行器,再比如平衡小车,还有汽车的定速巡航、3D 打印机上的温度控制器、恒温热水器等。就是类似于这种:需要将某一个物理量“保持稳定”的场合(比如维持平衡,稳定温度、转速等),PID 都会派上大用场。 它的公式为:  或者我们在编程时更常用的是数字式的 PID 公式:  PID 控制系统是一种闭环控制系统,闭环控制是根据控制对象输出的反馈来进行校正的控制方式。它能够根据测量出的实际值与计划值之间的误差 Error,按一定的标准来进行纠正。   PID_比例微积分控制 .rar PID_比例微积分控制 .rar最后用一张动图来总结一下本文讲的 PID 算法。从下图中,我们可以直观理解 PID 中三个参数 Kp、Ki、Kd 的作用。图中红色虚线为目标位置,蓝色实线为系统输出。 - 当调节 Kp 参数时,可以让系统输出越来越接近目标位置,但是存在抖动、以及存在稳定误差调节力度不够的问题; - 调节 Ki 参数,可以弥补 Kp 参数调节力度不够的问题,但是也会增加抖动; - 调节 Kd 参数,会让抖动减小,变化曲线更加平滑。  |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创客造
创客造
 编辑选择奖
编辑选择奖
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






