【项目意图】
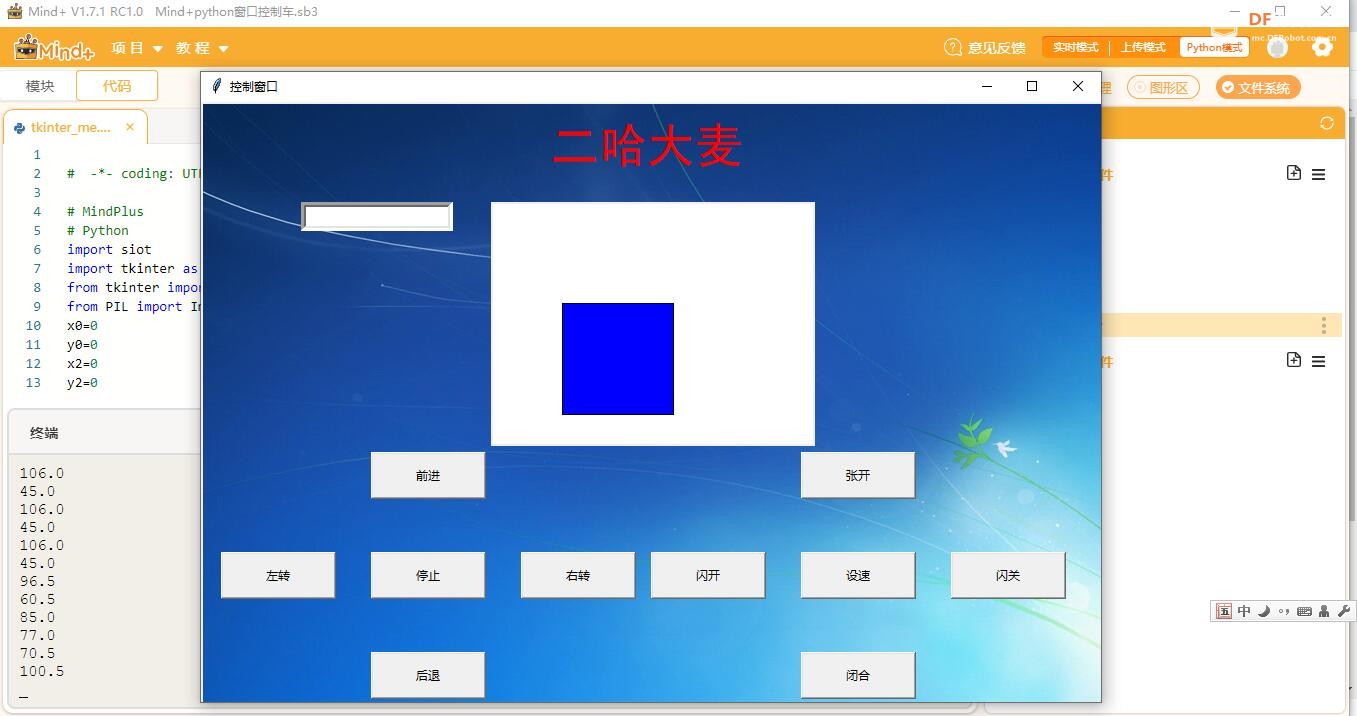
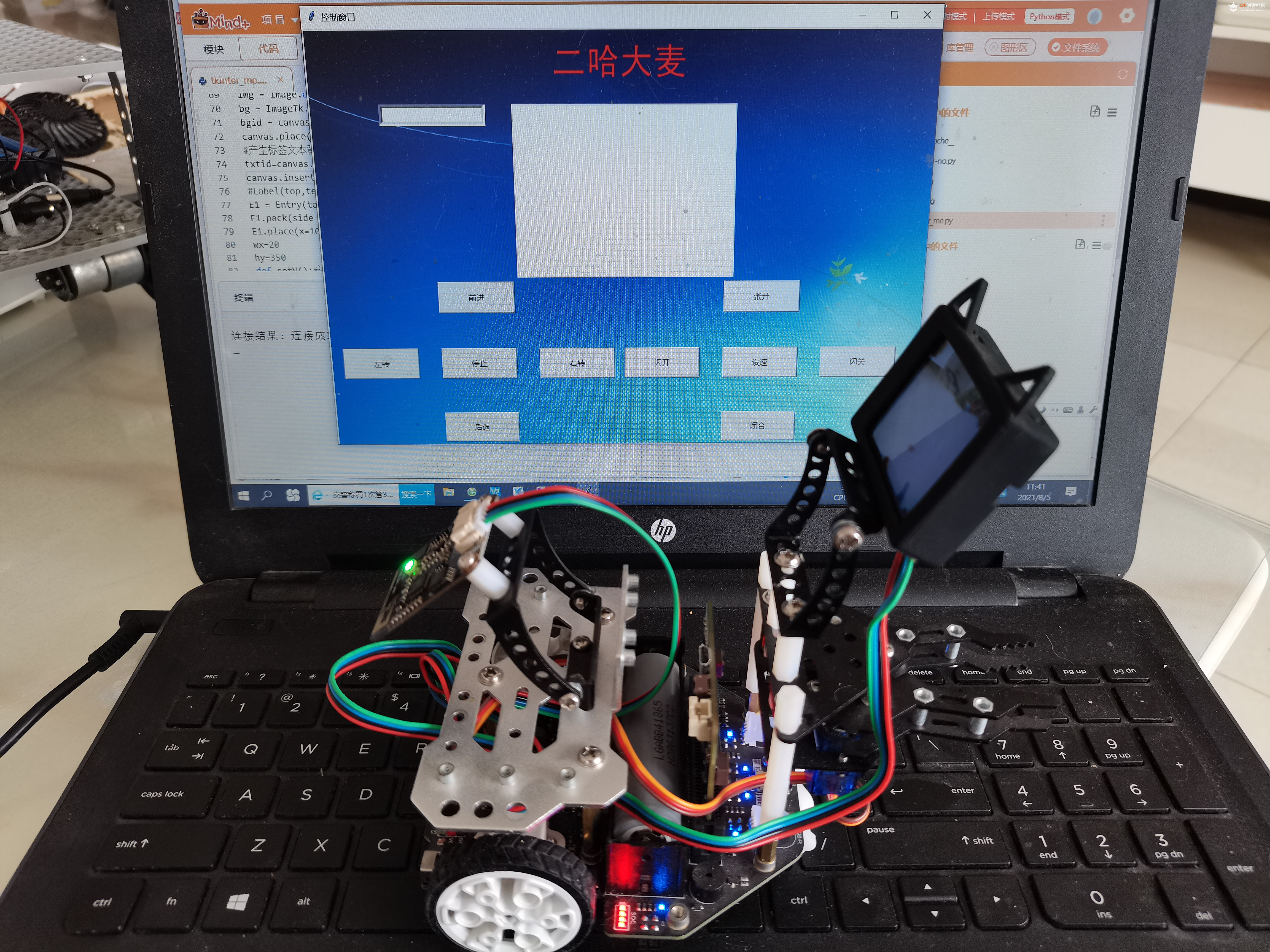
在Mind+python模式下,利用Tkinter库,物联网库siot,实现在电脑显示,二哈识别到的物体的位置。
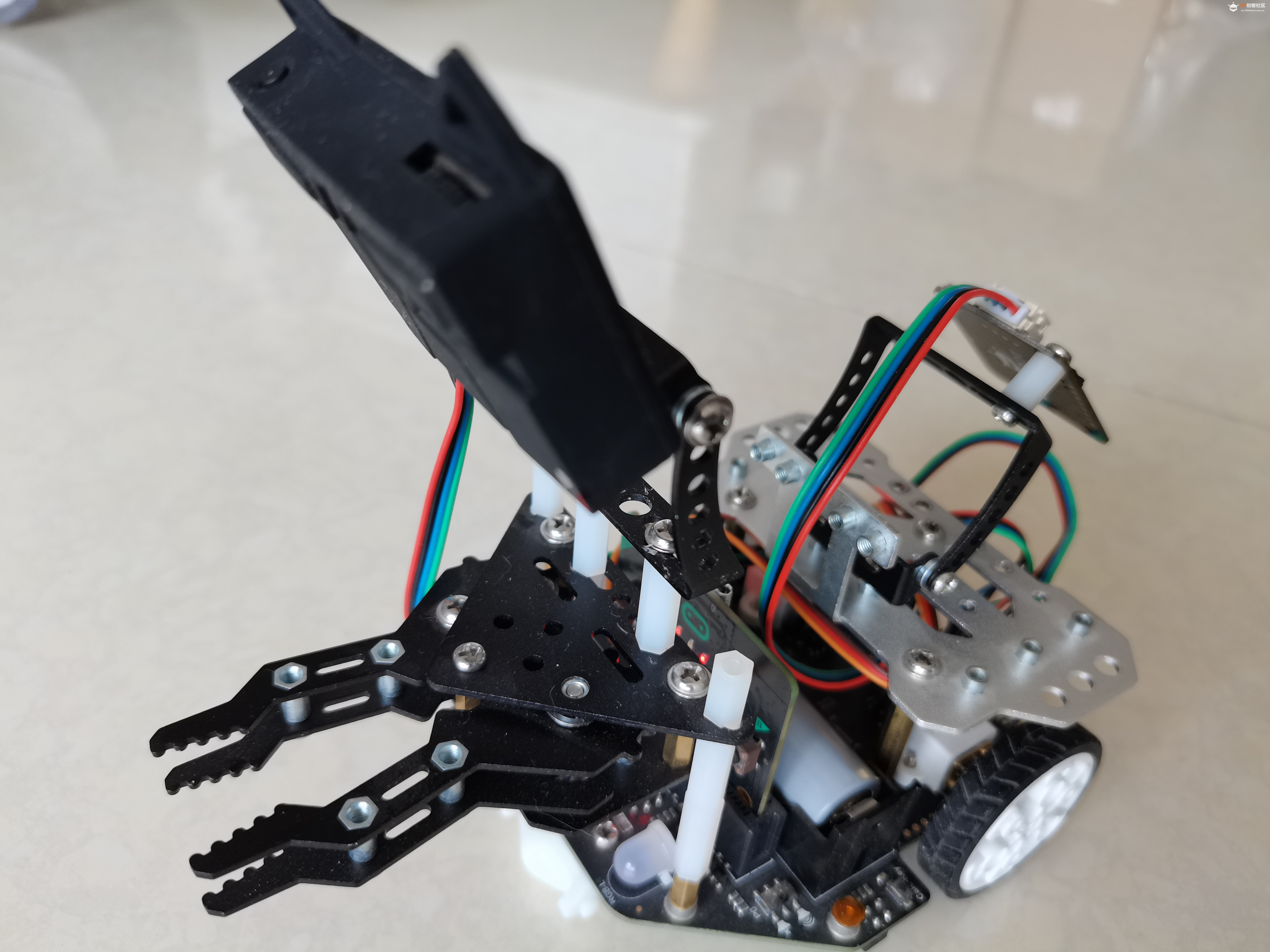
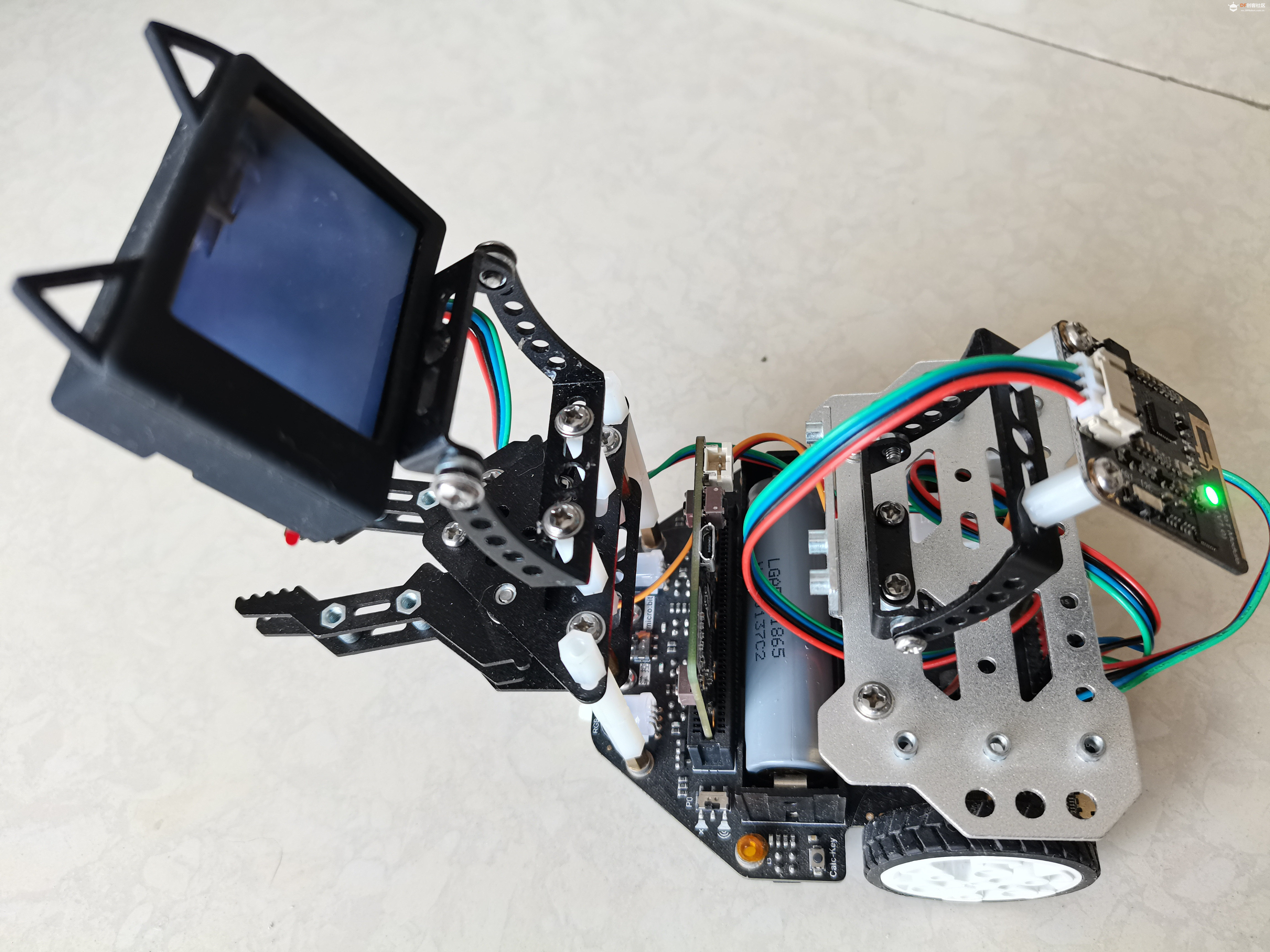
【硬件】
1、麦昆Plus
2、二哈
二哈识图(HuskyLens)是一款简单易用的人工智能视觉传感器,内置6种功能:人脸识别、物体追踪、物体识别、巡线追踪、颜色识别、标签识别。仅需一个按键即可完成AI训练,摆脱繁琐的训练和复杂的视觉算法,让你更加专注于项目的构思和实现。
3、WIFI IoT模块
WIFI IoT Module是一款支持多编程平台,多物联网平台的WIFI模块。它支持micro:bit、Arduino主控,MakeCode、Mind+、ArduinoIDE多种编程环境;支持EasyIoT、IFTTT、Thingspeak等多种流行的物联网平台。 WIFI IoT Module采用易用的Gravity接口,I2C和URAT两种通讯协议,UART模式兼容OBLOQ物联网模块的功能和用法,I2C模式兼容更多主控板,并可以最大限度避免传感器之间的冲突。不论是用于课堂IoT教学,还是家电的物联网改装,选用WIFI IoT Module都是非常好的方案。 【Microbit硬件程序】
上传到麦昆Plus上Micro:bit程序(Arduino C)
-
- /*!
- * MindPlus
- * microbit
- *
- */
- #include <Microbit_Obloq.h>
- #include <Microbit_Matrix.h>
- #include <DFRobot_HuskyLens.h>
- #include <DFRobot_MaqueenPlus.h>
-
- // 动态变量
- String mind_s_MingLing, mind_s_WeiZhiXinXi;
- volatile float mind_n_CheSu, mind_n_ShuangShan;
- // 函数声明
- void obloqMqttEventT0(String& obloq_message);
- void obloqMqttEventT1(String& obloq_message);
- // 静态常量
- const String topics[5] = {"5n92uqBMg","dH6_dBZ7g","QMM4DKG7R","",""};
- const uint8_t bbcBitmap[][5] = {
- {B01010,B10101,B10001,B01010,B00100}
- };
- const MsgHandleCb msgHandles[5] = {obloqMqttEventT0,obloqMqttEventT1,NULL,NULL,NULL};
- // 创建对象
- DFRobot_HuskyLens huskylens;
- Microbit_Obloq olq;
- DFRobot_MaqueenPlus maqueenPlus;
-
-
- // 主程序开始
- void setup() {
- olq.registerMqttHandle(msgHandles);
- huskylens.beginI2CUntilSuccess();
- huskylens.writeAlgorithm(ALGORITHM_OBJECT_TRACKING);
- olq.startConnect(0, 1, "sxs", "smj080823", "RNZYsQIWg", "gHWLswIWgz", topics, "iot.dfrobot.com.cn", 1883);
- MMatrix.show(bbcBitmap[0]);
- maqueenPlus.writePid(maqueenPlus.ON);
- maqueenPlus.servoRun(maqueenPlus.S3, 110);
- mind_n_CheSu = 30;
- mind_n_ShuangShan = 0;
- Serial.begin(9600);
- }
- void loop() {
- if ((mind_n_ShuangShan==1)) {
- maqueenPlus.setRGB(maqueenPlus.ALL, maqueenPlus.RED);
- delay(500);
- maqueenPlus.setRGB(maqueenPlus.ALL, maqueenPlus.PUT);
- delay(500);
- }
- else {
- huskylens.request();
- if (huskylens.isLearned(1)) {
- if (huskylens.isAppear(1,HUSKYLENSResultBlock)) {
- mind_s_MingLing = "";
- mind_s_WeiZhiXinXi = (String((String(huskylens.readBlockParameter(1).xCenter))) + String(":"));
- mind_s_WeiZhiXinXi = (String(mind_s_WeiZhiXinXi) + String((String((String(huskylens.readBlockParameter(1).yCenter))) + String(":"))));
- mind_s_WeiZhiXinXi = (String(mind_s_WeiZhiXinXi) + String((String((String(huskylens.readBlockParameter(1).width))) + String(":"))));
- mind_s_WeiZhiXinXi = (String(mind_s_WeiZhiXinXi) + String((String(huskylens.readBlockParameter(1).height))));
- olq.publish(olq.topic_2, mind_s_WeiZhiXinXi);
- Serial.println(mind_s_WeiZhiXinXi);
- delay(500);
- }
- }
- }
- }
-
-
- // 事件回调函数
- void obloqMqttEventT0(String& obloq_message) {
- mind_s_MingLing = obloq_message;
- Serial.println(mind_s_MingLing);
- if ((mind_s_MingLing==String("A"))) {
- maqueenPlus.motorRun(maqueenPlus.ALL, maqueenPlus.CW, mind_n_CheSu);
- maqueenPlus.setRGB(maqueenPlus.ALL, maqueenPlus.PUT);
- }
- if ((mind_s_MingLing==String("B"))) {
- maqueenPlus.motorRun(maqueenPlus.ALL, maqueenPlus.CCW, mind_n_CheSu);
- maqueenPlus.setRGB(maqueenPlus.ALL, maqueenPlus.RED);
- }
- if ((mind_s_MingLing==String("C"))) {
- maqueenPlus.motorStop(maqueenPlus.LEFT);
- maqueenPlus.motorRun(maqueenPlus.RIGHT, maqueenPlus.CW, mind_n_CheSu);
- maqueenPlus.setRGB(maqueenPlus.LEFT, maqueenPlus.RED);
- maqueenPlus.setRGB(maqueenPlus.RIGHT, maqueenPlus.PUT);
- }
- if ((mind_s_MingLing==String("D"))) {
- maqueenPlus.motorStop(maqueenPlus.RIGHT);
- maqueenPlus.motorRun(maqueenPlus.LEFT, maqueenPlus.CW, mind_n_CheSu);
- maqueenPlus.setRGB(maqueenPlus.RIGHT, maqueenPlus.RED);
- maqueenPlus.setRGB(maqueenPlus.LEFT, maqueenPlus.PUT);
- }
- if ((mind_s_MingLing==String("E"))) {
- maqueenPlus.motorStop(maqueenPlus.ALL);
- maqueenPlus.setRGB(maqueenPlus.ALL, maqueenPlus.PUT);
- }
- if ((mind_s_MingLing==String("F"))) {
- maqueenPlus.servoRun(maqueenPlus.S3, 50);
- }
- if ((mind_s_MingLing==String("G"))) {
- maqueenPlus.servoRun(maqueenPlus.S3, 100);
- }
- if ((mind_s_MingLing==String("H"))) {
- mind_n_ShuangShan = 1;
- }
- if ((mind_s_MingLing==String("I"))) {
- mind_n_ShuangShan = 0;
- }
- }
- void obloqMqttEventT1(String& obloq_message) {
- mind_n_CheSu = (String(obloq_message).toInt());
- }
-
mind+上传模式下图形代码
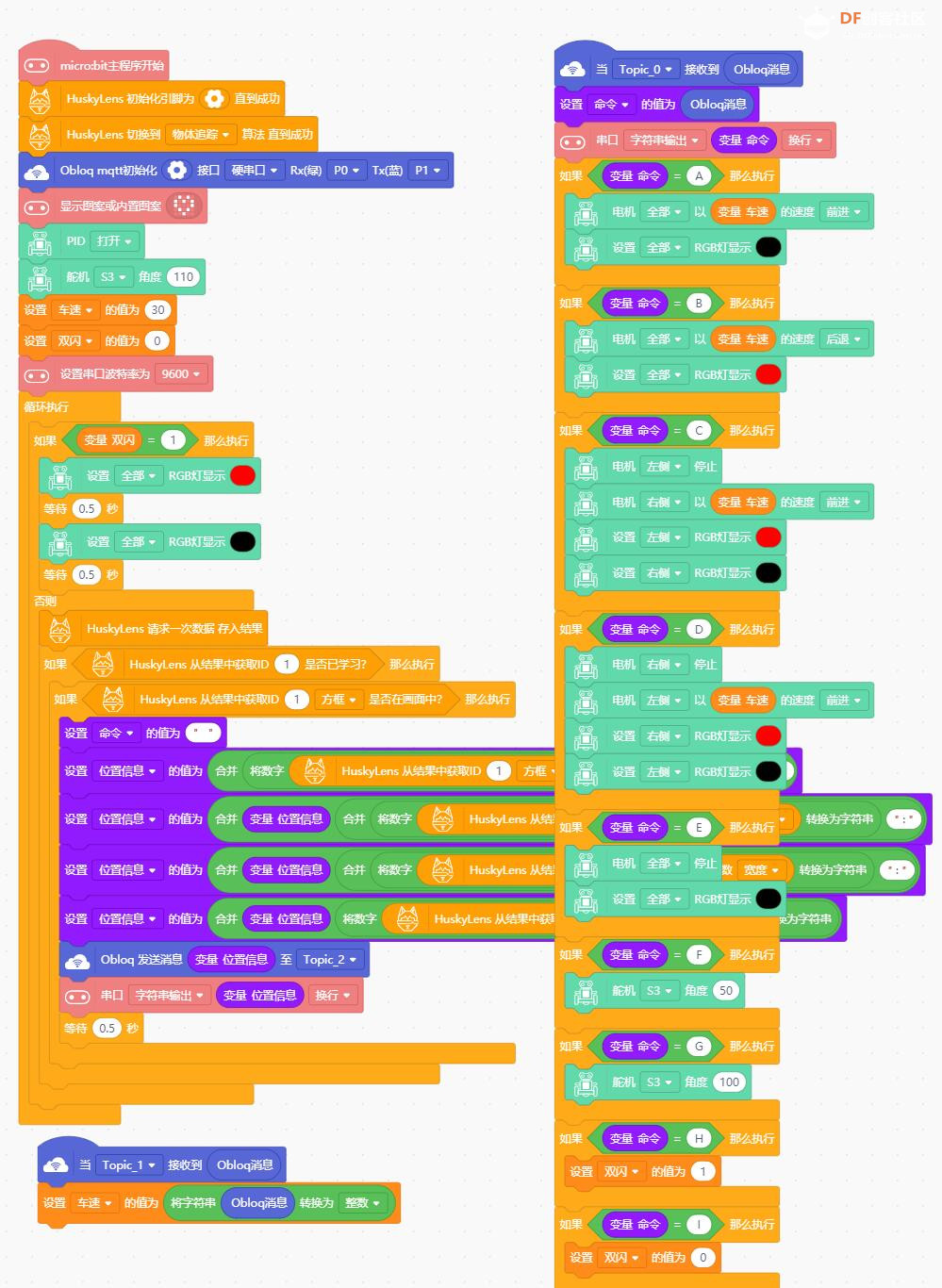
被遮挡部分

【电脑Mind+python代码】
-
-
- # -*- coding: UTF-8 -*-
-
- # MindPlus
- # Python
- import siot
- import tkinter as tk
- from tkinter import *
- from PIL import Image, ImageTk#图像控件
- x0=0
- y0=0
- x2=0
- y2=0
- #连接物联网
- siot.init(client_id="sxs12345678",server="iot.dfrobot.com.cn",port=1883,user="RNZYsQIWg",password="gHWLswIWgz")
- siot.connect()
-
- # 事件回调函数
- def on_message_callback(client, userdata, msg):
- global x0,y0,x2,y2
- infor=str(msg.payload.decode("utf-8"))
- list_me=infor.split(":")
- x0=int(list_me[0])-int(list_me[2])/2
- y0=int(list_me[1])-int(list_me[3])/2
- x1=int(list_me[0])+int(list_me[2])/2
- y1=int(list_me[1])-int(list_me[3])/2
- x2=int(list_me[0])+int(list_me[2])/2
- y2=int(list_me[1])+int(list_me[3])/2
- x3=int(list_me[0])-int(list_me[2])/2
- y3=int(list_me[1])+int(list_me[3])/2
-
- print(x0)
- print(y0)
- siot.getsubscribe(topic="QMM4DKG7R")
- siot.set_callback(on_message_callback)
-
- siot.loop()
- #定义函数,向物联网发送相应控制指令
- def forward():#前进
- siot.publish(topic="5n92uqBMg", data="A")
- def back():#后退
- siot.publish(topic="5n92uqBMg", data="B")
- def left():#左转
- siot.publish(topic="5n92uqBMg", data="C")
- def right():#右转
- siot.publish(topic="5n92uqBMg", data="D")
- def stop():#停止
- siot.publish(topic="5n92uqBMg", data="E")
- def open_s():#张开
- siot.publish(topic="5n92uqBMg", data="F")
- def stop_s():#闭合
- siot.publish(topic="5n92uqBMg", data="G")
- def light_open():#双闪开
- siot.publish(topic="5n92uqBMg", data="H")
- def light_close():#双闪关
- siot.publish(topic="5n92uqBMg", data="I")
-
- #生成窗体,布置相应文本框和按钮
- top = tk.Tk()
- top.title('控制窗口')
- top.geometry('900x600')
- image_width = 900
- image_height = 600
- canvas = Canvas(top,bg = 'white',width = image_width,height = image_height )#绘制画布
- canvas.pack()
- canvas2 = Canvas(top,bg = 'white',width = 320,height = 240 )#绘制画布
- canvas.pack()
- canvas2.place(x = 290,y = 100)
- img = Image.open('bg.jpg')
- bg = ImageTk.PhotoImage(img)
- bgid = canvas.create_image(0, 0, image=bg, anchor='nw')
- canvas.place(x = 0,y = 0)
- #产生标签文本背景透明效果
- txtid=canvas.create_text(350,20, fill = 'red',font=("黑体", 35),anchor="nw")
- canvas.insert(txtid,1,"二哈大麦")
- #Label(top,text = '物联网大麦!',font = ("黑体",14),width =15,height = 1).place(x =400,y = 20,anchor = 'nw')
- E1 = Entry(top, bd =5)
- E1.pack(side = RIGHT)
- E1.place(x=100,y=100)
- wx=20
- hy=350
- def setV():#设置车速
- siot.publish(topic="dH6_dBZ7g", data=str(E1.get()))
-
- #生成按钮,并指定相应功能
- left = tk.Button(top,text='左转',height=2,width=15,command=left)
- left.place(x=wx,y=hy+100)
- forward = tk.Button(top,text='前进',height=2,width=15,command=forward)
- forward.place(x=wx+150,y=hy)
- right = tk.Button(top,text='右转',height=2,width=15,command=right)
- right.place(x=wx+300,y=hy+100)
- back = tk.Button(top,text='后退',height=2,width=15,command=back)
- back.place(x=wx+150,y=hy+200)
- stop = tk.Button(top,text='停止',height=2,width=15,command=stop)
- stop.place(x=wx+150,y=hy+100)
-
- wx=450
- hy=350
- open_s = tk.Button(top,text='张开',height=2,width=15,command=open_s)
- open_s.place(x=wx+150,y=hy)
- stop_s = tk.Button(top,text='闭合',height=2,width=15,command=stop_s)
- stop_s.place(x=wx+150,y=hy+200)
- light_open = tk.Button(top,text='闪开',height=2,width=15,command=light_open)
- light_open.place(x=wx,y=hy+100)
- light_close = tk.Button(top,text='闪关',height=2,width=15,command=light_close)
- light_close.place(x=wx+300,y=hy+100)
- setV = tk.Button(top,text='设速',height=2,width=15,command=setV)
- setV.place(x=wx+150,y=hy+100)
-
-
-
-
- while True:
- canvas2.delete("all")
- canvas2.create_rectangle(x0,y0,x2,y2,fill='blue')
- top.update()
- top.after(100)
-
-
- top.mainloop()
-
【演示视频】
|




 沪公网安备31011502402448
沪公网安备31011502402448
 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创客造
创客造
 编辑选择奖
编辑选择奖
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






