|
173914| 200
|
[教程] 一块扩展板完成Arduino的10类37项实验(代码+图形+仿真) |

|
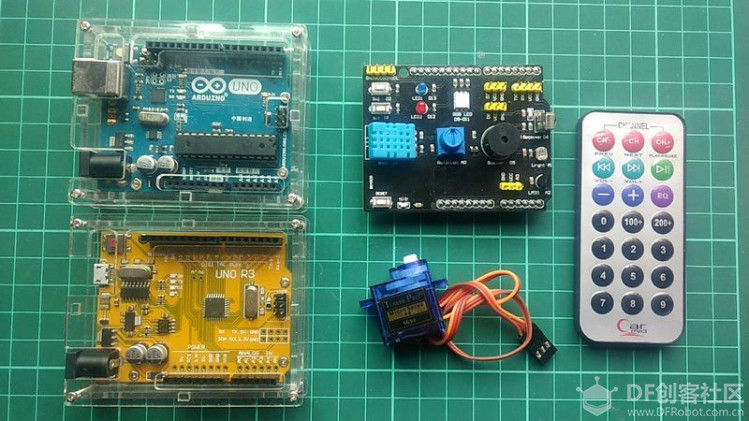
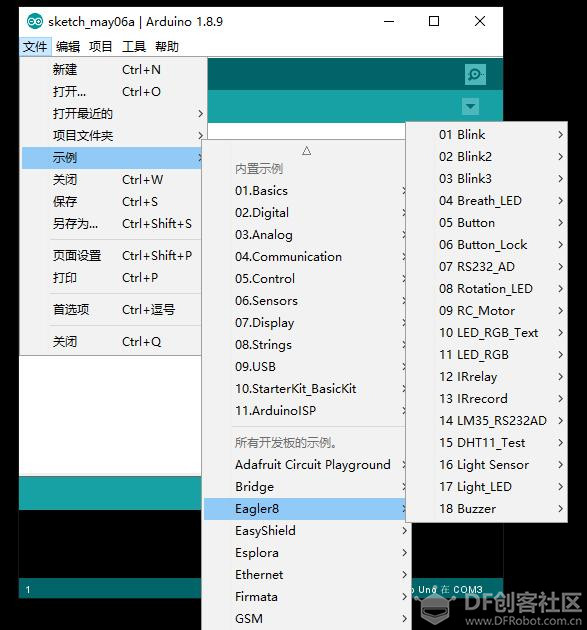
本帖最后由 驴友花雕 于 2019-8-17 06:12 编辑 采取"Arduino程序代码"+"Mind+图形编程"+"Linkboy仿真编程'三者相结合的方式 互为补充,打好基础,促进理解  实验目录(Arduino动手做) 一、LED 实验 01 Blink:D13蓝色 LED 闪烁 02 Blink2:D12、D13红蓝色 LED 交替闪烁 03 Blink3:模拟爆闪警灯 04 Breath_LED:D9 全彩 LED 模拟红色呼吸灯 二、按键实验 05 Button:D2 按键控制 D13蓝色 LED 06 Button_Lock:D3 按键控制 D13 蓝色LED 自锁实验 三、电位器实验 07 RS232_AD:串口读取 A0 电位器采集数值(旋转角度270°输出0-3.3V/5V电压信号电位器阻值10K) 08 Rotation_LED:A0 电位器控制 D11 全彩 LED 蓝色端亮度 09 RC_Motor:A0 电位器控制 D7 输出口的舵机控制其转动角度(舵机需自备Arduino 需要外部供电) 四、RGB 全彩 LED 实验 10 LED_RGB_Text:全彩 LED 基本颜色变化 11 LED_RGB:全彩 LED 彩虹变化 五、红外传感器D6实验(红外遥控器需自备) 12 IRrelay:按红外遥控器任意键,可以控制 D13 LED 开关(控制距离1-8米,频率38KHz,兼容市面上大部分红外遥控器) 13 IRrecord:串口显示读取的红外遥控代码 六、温度传感器实验 14 LM35_RS232AD:串口显示 A2 口 LM35 温度传感器读取的温度(可测试室内外温度,范围-50-150°C,灵敏度好) 七、温湿度传感器实验 15 DHT11_Test:串口显示 D4 口 DHT11 温湿度传感器读取的温湿度数据(测温范围0-50°C,湿度范围20%-90%PH) 八、亮度传感器实验 16 Light Sensor:串口显示 A1 口光敏电阻采集的数值 17 Light_LED:A1 口光敏电阻控制 D13 LED 开关(感光比较灵敏,适合教学实验及民用设备) 九、蜂鸣器实验 18 Buzzer:D5 口无源蜂鸣器模拟救护车警笛(可发出简单的音乐声,音乐需要通过程序编写) 十、扩展实验 19 模拟超声波测距传感器(探测类I,IIC/I2C接口) 20 总线DS18B20温度传感器(数值类,接扩展板数字D7接口) 21 TM1637四位数码管(数码管和点阵类,接扩展板数字D7/D8接口) 22 GY-BMP280-3.3 大气压强高度计传感器模块 ( 数值类,IIC/I2C接口) 23 GY-NEO-6MV2新款飞控GPS卫星信号接收模块 (数值类,TTL接口) 24 5V低电平触发单路继电器模块(执行类,数字D7接口) 25 带驻极话筒4线制声音传感器模块(触发类,数字D7接口) 26 BH1750FVI 数字光强度模块光照传感器(数值类, IIC/I2C接口) 27 开源DFPlayer Mini TF卡MP3播放模块(输出执行器类D7/D8数字接口) 28 LCD1602液晶屏模块(输出显示器类, IIC/I2C接口) 29 人体红外热释电运动传感器模块 (触发类,数字D7接口) 30 DS1307时钟模块 Tiny RTC I2C模块(探测传感器类, IIC/I2C接口) 31 兼容HC-06从机蓝牙模块(通信与存储类,TTL接口) (待续) |
|
[mw_shl_code=c,true]/* Eagler8系列实验程序列表 第十类 板载端口扩展实验 32 0.96寸OLED12864液晶屏模块(显示器类,IIC接口) 实验接线:A4---SDA, A5---SCL 项目四:动画示例中的雪花飘 */ #include <SPI.h> #include <Wire.h> #include <Adafruit_GFX.h> #include <Adafruit_SSD1306.h> #define SCREEN_WIDTH 128 #define SCREEN_HEIGHT 64 #define OLED_RESET 4 Adafruit_SSD1306 display(SCREEN_WIDTH, SCREEN_HEIGHT, &Wire, OLED_RESET); #define NUMFLAKES 10 #define LOGO_HEIGHT 16 #define LOGO_WIDTH 16 static const unsigned char PROGMEM logo_bmp[] = { B00000000, B11000000, B00000001, B11000000, B00000001, B11000000, B00000011, B11100000, B11110011, B11100000, B11111110, B11111000, B01111110, B11111111, B00110011, B10011111, B00011111, B11111100, B00001101, B01110000, B00011011, B10100000, B00111111, B11100000, B00111111, B11110000, B01111100, B11110000, B01110000, B01110000, B00000000, B00110000 }; void setup() { Serial.begin(9600); if(!display.begin(SSD1306_SWITCHCAPVCC, 0x3C)) { Serial.println(F("SSD1306 allocation failed")); for(;;); } display.display(); delay(2000); display.clearDisplay(); display.drawPixel(10, 10, WHITE); display.display(); delay(2000); testdrawline(); testdrawrect(); testfillrect(); testdrawcircle(); testfillcircle(); testdrawroundrect(); testfillroundrect(); testdrawtriangle(); testfilltriangle(); testdrawchar(); testdrawstyles(); testscrolltext(); testdrawbitmap(); display.invertDisplay(true); delay(1000); display.invertDisplay(false); delay(1000); testanimate(logo_bmp, LOGO_WIDTH, LOGO_HEIGHT); } void loop() { } void testdrawline() { int16_t i; display.clearDisplay(); for(i=0; i<display.width(); i+=4) { display.drawLine(0, 0, i, display.height()-1, WHITE); display.display(); delay(1); } for(i=0; i<display.height(); i+=4) { display.drawLine(0, 0, display.width()-1, i, WHITE); display.display(); delay(1); } delay(250); display.clearDisplay(); for(i=0; i<display.width(); i+=4) { display.drawLine(0, display.height()-1, i, 0, WHITE); display.display(); delay(1); } for(i=display.height()-1; i>=0; i-=4) { display.drawLine(0, display.height()-1, display.width()-1, i, WHITE); display.display(); delay(1); } delay(250); display.clearDisplay(); for(i=display.width()-1; i>=0; i-=4) { display.drawLine(display.width()-1, display.height()-1, i, 0, WHITE); display.display(); delay(1); } for(i=display.height()-1; i>=0; i-=4) { display.drawLine(display.width()-1, display.height()-1, 0, i, WHITE); display.display(); delay(1); } delay(250); display.clearDisplay(); for(i=0; i<display.height(); i+=4) { display.drawLine(display.width()-1, 0, 0, i, WHITE); display.display(); delay(1); } for(i=0; i<display.width(); i+=4) { display.drawLine(display.width()-1, 0, i, display.height()-1, WHITE); display.display(); delay(1); } delay(2000); } void testdrawrect(void) { display.clearDisplay(); for(int16_t i=0; i<display.height()/2; i+=2) { display.drawRect(i, i, display.width()-2*i, display.height()-2*i, WHITE); display.display(); delay(1); } delay(2000); } void testfillrect(void) { display.clearDisplay(); for(int16_t i=0; i<display.height()/2; i+=3) { // The INVERSE color is used so rectangles alternate white/black display.fillRect(i, i, display.width()-i*2, display.height()-i*2, INVERSE); display.display(); delay(1); } delay(2000); } void testdrawcircle(void) { display.clearDisplay(); for(int16_t i=0; i<max(display.width(),display.height())/2; i+=2) { display.drawCircle(display.width()/2, display.height()/2, i, WHITE); display.display(); delay(1); } delay(2000); } void testfillcircle(void) { display.clearDisplay(); for(int16_t i=max(display.width(),display.height())/2; i>0; i-=3) { display.fillCircle(display.width() / 2, display.height() / 2, i, INVERSE); display.display(); delay(1); } delay(2000); } void testdrawroundrect(void) { display.clearDisplay(); for(int16_t i=0; i<display.height()/2-2; i+=2) { display.drawRoundRect(i, i, display.width()-2*i, display.height()-2*i, display.height()/4, WHITE); display.display(); delay(1); } delay(2000); } void testfillroundrect(void) { display.clearDisplay(); for(int16_t i=0; i<display.height()/2-2; i+=2) { display.fillRoundRect(i, i, display.width()-2*i, display.height()-2*i, display.height()/4, INVERSE); display.display(); delay(1); } delay(2000); } void testdrawtriangle(void) { display.clearDisplay(); for(int16_t i=0; i<max(display.width(),display.height())/2; i+=5) { display.drawTriangle( display.width()/2 , display.height()/2-i, display.width()/2-i, display.height()/2+i, display.width()/2+i, display.height()/2+i, WHITE); display.display(); delay(1); } delay(2000); } void testfilltriangle(void) { display.clearDisplay(); for(int16_t i=max(display.width(),display.height())/2; i>0; i-=5) { display.fillTriangle( display.width()/2 , display.height()/2-i, display.width()/2-i, display.height()/2+i, display.width()/2+i, display.height()/2+i, INVERSE); display.display(); delay(1); } delay(2000); } void testdrawchar(void) { display.clearDisplay(); display.setTextSize(1); display.setTextColor(WHITE); display.setCursor(0, 0); display.cp437(true); for(int16_t i=0; i<256; i++) { if(i == '\n') display.write(' '); else display.write(i); } display.display(); delay(2000); } void testdrawstyles(void) { display.clearDisplay(); display.setTextSize(1); display.setTextColor(WHITE); display.setCursor(0,0); display.println(F("Hello, world!")); display.setTextColor(BLACK, WHITE); display.println(3.141592); display.setTextSize(2); display.setTextColor(WHITE); display.print(F("0x")); display.println(0xDEADBEEF, HEX); display.display(); delay(2000); } void testscrolltext(void) { display.clearDisplay(); display.setTextSize(2); display.setTextColor(WHITE); display.setCursor(10, 0); display.println(F("scroll")); display.display(); delay(100); display.startscrollright(0x00, 0x0F); delay(2000); display.stopscroll(); delay(1000); display.startscrollleft(0x00, 0x0F); delay(2000); display.stopscroll(); delay(1000); display.startscrolldiagright(0x00, 0x07); delay(2000); display.startscrolldiagleft(0x00, 0x07); delay(2000); display.stopscroll(); delay(1000); } void testdrawbitmap(void) { display.clearDisplay(); display.drawBitmap( (display.width() - LOGO_WIDTH ) / 2, (display.height() - LOGO_HEIGHT) / 2, logo_bmp, LOGO_WIDTH, LOGO_HEIGHT, 1); display.display(); delay(1000); } #define XPOS 0 #define YPOS 1 #define DELTAY 2 void testanimate(const uint8_t *bitmap, uint8_t w, uint8_t h) { int8_t f, icons[NUMFLAKES][3]; for(f=0; f< NUMFLAKES; f++) { icons[f][XPOS] = random(1 - LOGO_WIDTH, display.width()); icons[f][YPOS] = -LOGO_HEIGHT; icons[f][DELTAY] = random(1, 6); Serial.print(F("x: ")); Serial.print(icons[f][XPOS], DEC); Serial.print(F(" y: ")); Serial.print(icons[f][YPOS], DEC); Serial.print(F(" dy: ")); Serial.println(icons[f][DELTAY], DEC); } for(;;) { display.clearDisplay(); for(f=0; f< NUMFLAKES; f++) { display.drawBitmap(icons[f][XPOS], icons[f][YPOS], bitmap, w, h, WHITE); } display.display(); delay(200); for(f=0; f< NUMFLAKES; f++) { icons[f][YPOS] += icons[f][DELTAY]; if (icons[f][YPOS] >= display.height()) { icons[f][XPOS] = random(1 - LOGO_WIDTH, display.width()); icons[f][YPOS] = -LOGO_HEIGHT; icons[f][DELTAY] = random(1, 6); } } } }[/mw_shl_code] |
|
13 IRrecord:串口显示读取的红外遥控代码 [mw_shl_code=c,true]/* Eagler8实验程序列表 13 IRrecord:串口显示读取的红外遥控代码 */ #include <IRremote.h> int RECV_PIN = 8; int BUTTON_PIN = 12; int STATUS_PIN = 13; IRrecv irrecv(RECV_PIN); IRsend irsend; decode_results results; void setup() { Serial.begin(9600); irrecv.enableIRIn(); // Start the receiver pinMode(BUTTON_PIN, INPUT); pinMode(STATUS_PIN, OUTPUT); } // Storage for the recorded code int codeType = -1; // The type of code unsigned long codeValue; // The code value if not raw unsigned int rawCodes[RAWBUF]; // The durations if raw int codeLen; // The length of the code int toggle = 0; // The RC5/6 toggle state // Stores the code for later playback // Most of this code is just logging void storeCode(decode_results *results) { codeType = results->decode_type; int count = results->rawlen; if (codeType == UNKNOWN) { Serial.println("Received unknown code, saving as raw"); codeLen = results->rawlen - 1; // To store raw codes: // Drop first value (gap) // Convert from ticks to microseconds // Tweak marks shorter, and spaces longer to cancel out IR receiver distortion for (int i = 1; i <= codeLen; i++) { if (i % 2) { // Mark rawCodes[i - 1] = results->rawbuf*USECPERTICK - MARK_EXCESS; Serial.print(" m"); } else { // Space rawCodes[i - 1] = results->rawbuf*USECPERTICK + MARK_EXCESS; Serial.print(" s"); } Serial.print(rawCodes[i - 1], DEC); } Serial.println(""); } else { if (codeType == NEC) { Serial.print("Received NEC: "); if (results->value == REPEAT) { // Don't record a NEC repeat value as that's useless. Serial.println("repeat; ignoring."); return; } } else if (codeType == SONY) { Serial.print("Received SONY: "); } else if (codeType == RC5) { Serial.print("Received RC5: "); } else if (codeType == RC6) { Serial.print("Received RC6: "); } else { Serial.print("Unexpected codeType "); Serial.print(codeType, DEC); Serial.println(""); } Serial.println(results->value, HEX); codeValue = results->value; codeLen = results->bits; } } void sendCode(int repeat) { if (codeType == NEC) { if (repeat) { irsend.sendNEC(REPEAT, codeLen); Serial.println("Sent NEC repeat"); } else { irsend.sendNEC(codeValue, codeLen); Serial.print("Sent NEC "); Serial.println(codeValue, HEX); } } else if (codeType == SONY) { irsend.sendSony(codeValue, codeLen); Serial.print("Sent Sony "); Serial.println(codeValue, HEX); } else if (codeType == RC5 || codeType == RC6) { if (!repeat) { // Flip the toggle bit for a new button press toggle = 1 - toggle; } // Put the toggle bit into the code to send codeValue = codeValue & ~(1 << (codeLen - 1)); codeValue = codeValue | (toggle << (codeLen - 1)); if (codeType == RC5) { Serial.print("Sent RC5 "); Serial.println(codeValue, HEX); irsend.sendRC5(codeValue, codeLen); } else { irsend.sendRC6(codeValue, codeLen); Serial.print("Sent RC6 "); Serial.println(codeValue, HEX); } } else if (codeType == UNKNOWN /* i.e. raw */) { // Assume 38 KHz irsend.sendRaw(rawCodes, codeLen, 38); Serial.println("Sent raw"); } } int lastButtonState; void loop() { // If button pressed, send the code. int buttonState = digitalRead(BUTTON_PIN); if (lastButtonState == HIGH && buttonState == LOW) { Serial.println("Released"); irrecv.enableIRIn(); // Re-enable receiver } if (buttonState) { Serial.println("Pressed, sending"); digitalWrite(STATUS_PIN, HIGH); sendCode(lastButtonState == buttonState); digitalWrite(STATUS_PIN, LOW); delay(50); // Wait a bit between retransmissions } else if (irrecv.decode(&results)) { digitalWrite(STATUS_PIN, HIGH); storeCode(&results); irrecv.resume(); // resume receiver digitalWrite(STATUS_PIN, LOW); } lastButtonState = buttonState; }[/mw_shl_code] |
|
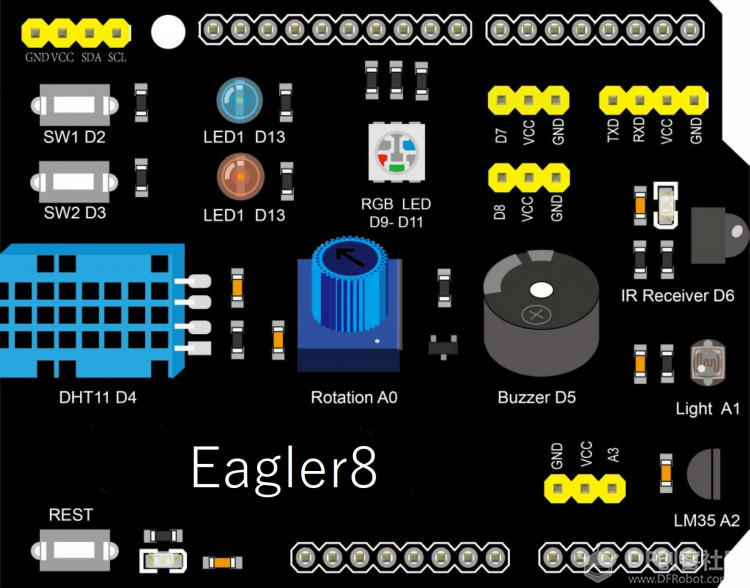
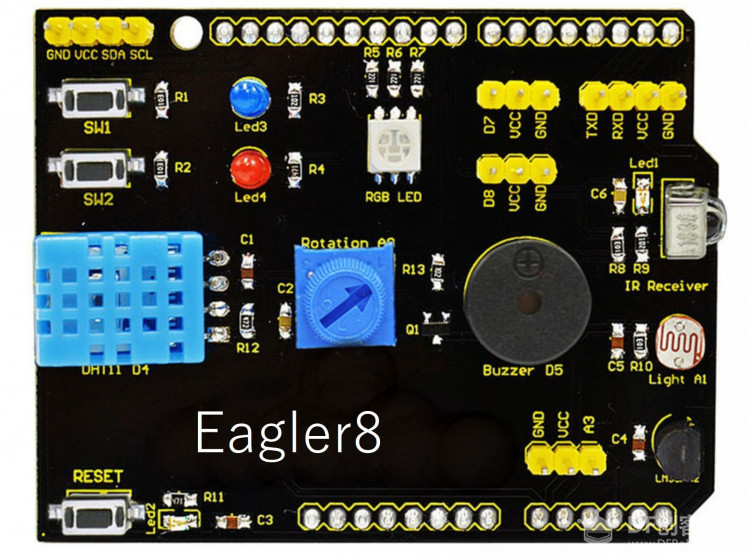
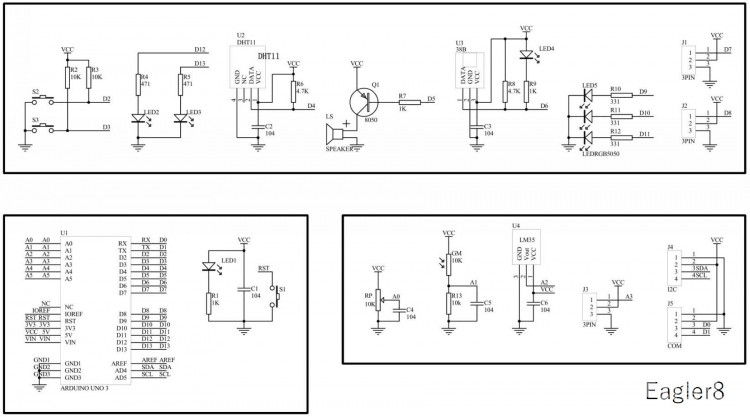
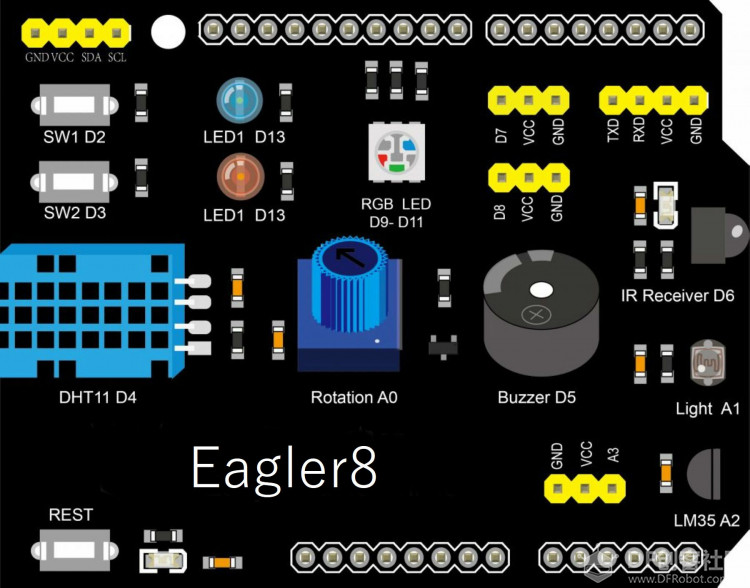
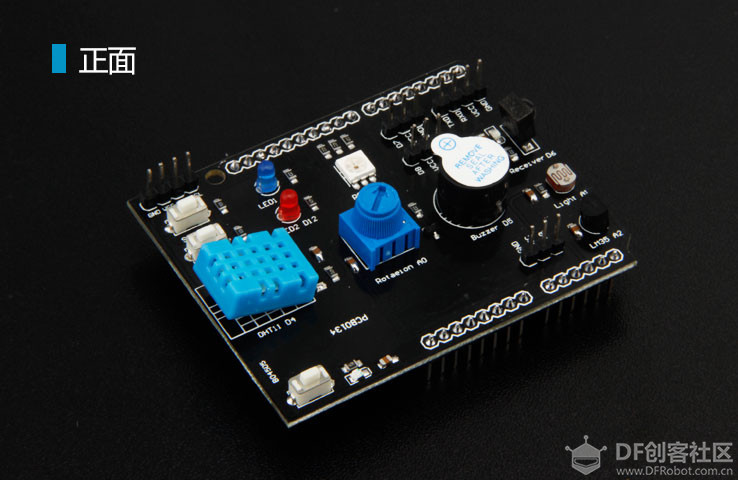
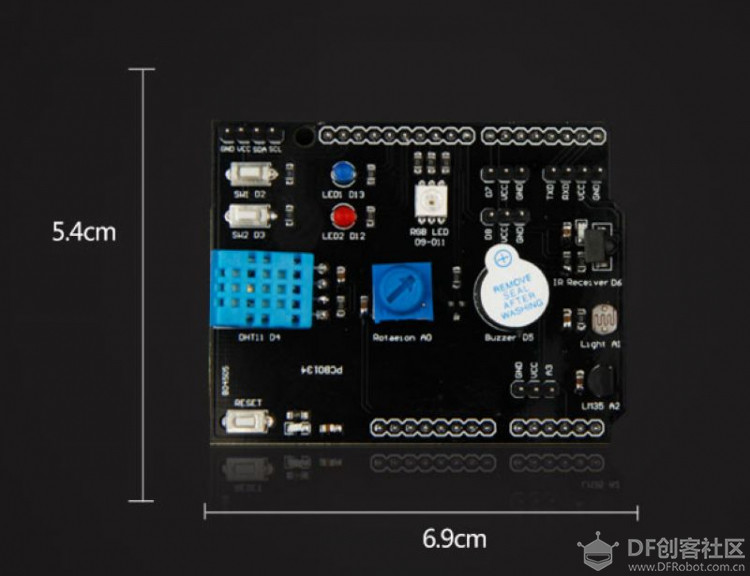
3、Eagler8模块与板载端口: 复位按键(REST) 10K旋转电位器模块(A0) 2路SW按键模块(D2、D3) Light亮度传感器模块(A1) LM35D温度传感器模块(A2) Buzzer无源蜂鸣器模块(D5) DHT11温湿度传感器模块(D4) ER Receiver红外接收模块(D6) 1路Analog Port模拟量端口(A3) RGB全彩LED模块(D9、D10、D11) 2路Digital Port数字量端口(D7、D8) 1个TTL串口(可接入蓝牙或WIFI模块等) 2路3mm LED模块(红色D12、蓝色D13) 1个双向同步串行总线I2C接口(A4 SDA及A5 SCL,可接显示屏等)  |
|
本帖最后由 驴友花雕 于 2019-6-10 09:20 编辑 01 Blink:D13蓝色 LED 闪烁  [mw_shl_code=c,true]/* Eagler8实验程序列表 01 Blink:D13蓝色 LED 闪烁 */ int led = 13; void setup() { pinMode(led, OUTPUT); } void loop() { digitalWrite(led, HIGH); delay(1000); digitalWrite(led, LOW); delay(1000); } [/mw_shl_code] 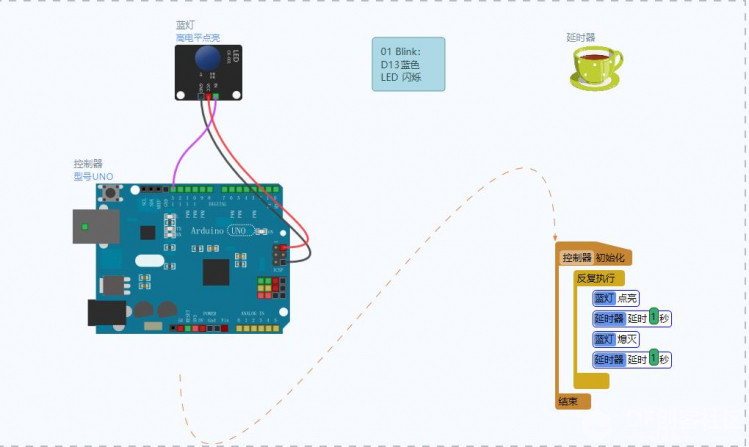 |
|
本帖最后由 驴友花雕 于 2019-6-10 09:57 编辑 02 Blink2:D12、D13红蓝色 LED 交替闪烁  [mw_shl_code=cpp,true]/* Eagler8实验程序列表 02 Blink2:D12、D13红蓝色 LED 交替闪烁 */ int led1 = 12; int led2 = 13; void setup() { pinMode(led1, OUTPUT); pinMode(led2, OUTPUT); } void loop() { digitalWrite(led1, HIGH); delay(1000); digitalWrite(led1, LOW); digitalWrite(led2, HIGH); delay(1000); digitalWrite(led2, LOW); }[/mw_shl_code] 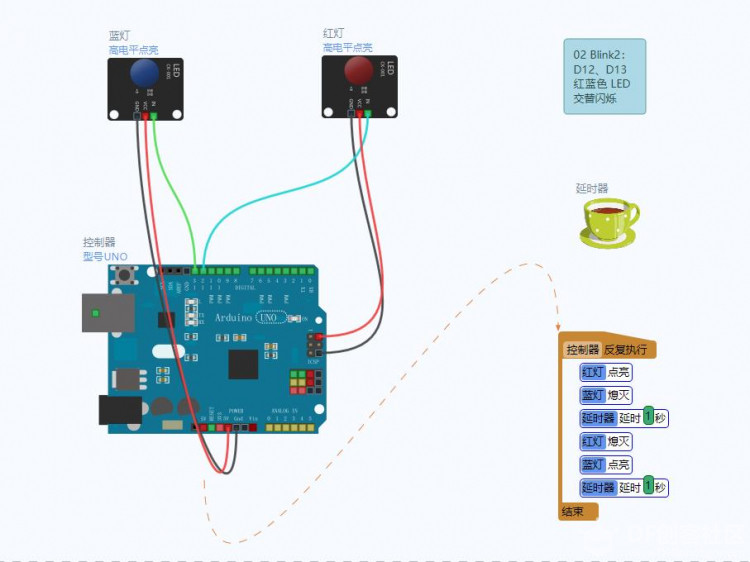 |
|
本帖最后由 驴友花雕 于 2019-6-10 10:39 编辑 03 Blink3:模拟爆闪警灯 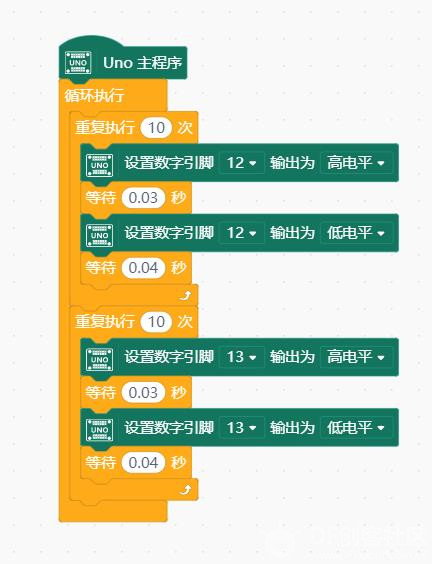 [mw_shl_code=cpp,true]/* Eagler8实验程序列表 03 Blink3:模拟爆闪警灯 */ int led1 = 12; int led2 = 13; int i,j; void setup() { pinMode(led1, OUTPUT); pinMode(led2, OUTPUT); } void loop() { for(i=0;i<10;i++){ digitalWrite(led1, HIGH); delay(30); digitalWrite(led1, LOW); delay(40); } for(i=0;i<10;i++){ digitalWrite(led2, HIGH); delay(30); digitalWrite(led2, LOW); delay(40); } }[/mw_shl_code] 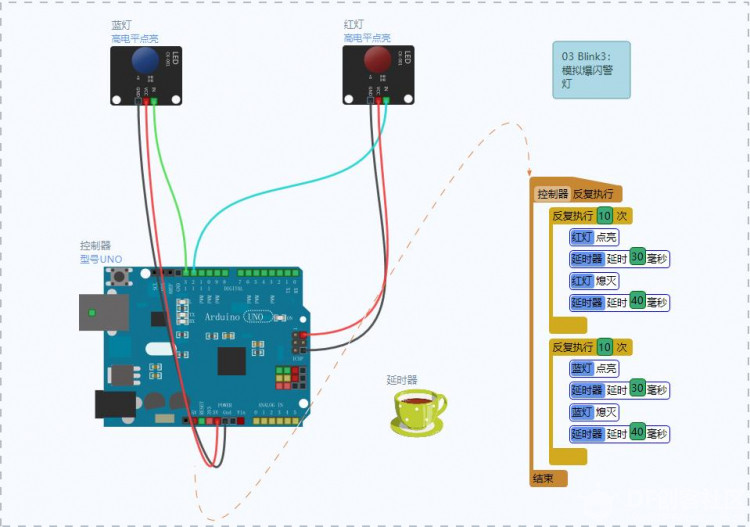 |
|
本帖最后由 驴友花雕 于 2019-6-10 13:06 编辑 04 Breath_LED: D9 全彩 LED 模拟红色呼吸灯 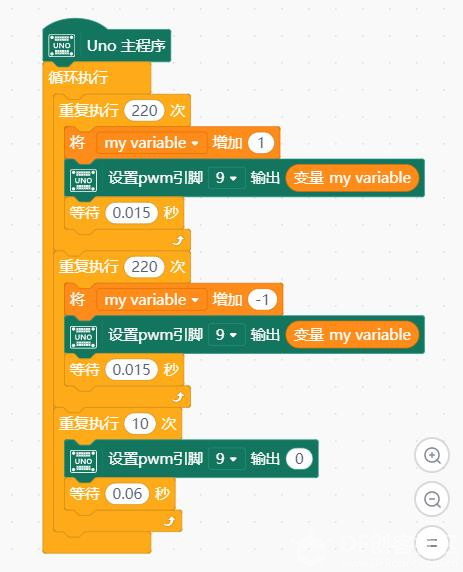 [mw_shl_code=cpp,true]/* Eagler8实验程序列表 04 Breath_LED:D9 全彩 LED 模拟红色呼吸灯 */ #define LED 9 int i = 0; void setup() { pinMode(LED,OUTPUT); } void loop() { for(i=0;i<220;i++) { analogWrite(LED,i); delay(15); } for(i=220;i>0;i--) { analogWrite(LED,i); delay(15); } analogWrite(LED,0); delay(60); }[/mw_shl_code] 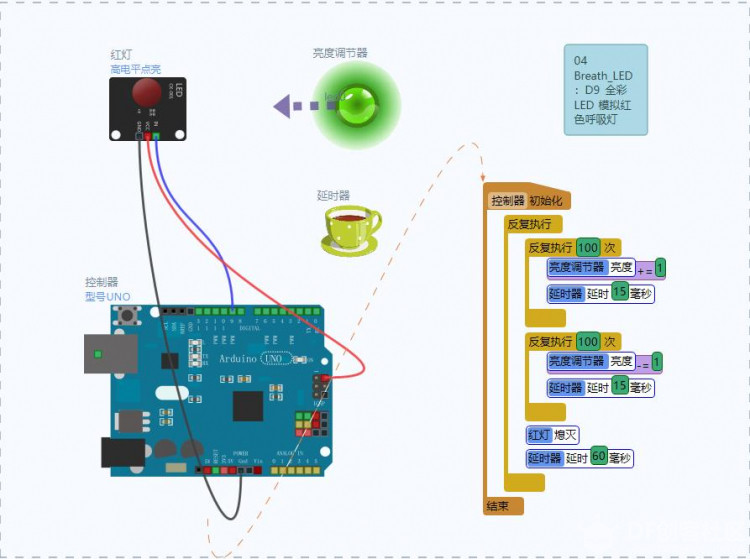 |
|
本帖最后由 驴友花雕 于 2019-6-10 15:20 编辑 05 Button:D2 按键控制 D13蓝色 LED  [mw_shl_code=cpp,true]/* Eagler8实验程序列表 05 Button:D2 按键控制 D13蓝色 LED */ int ledPin = 13; int inputPin = 2; int val = 0; void setup() { pinMode(ledPin, OUTPUT); pinMode(inputPin, INPUT); } void loop() { val = digitalRead(inputPin); if(val == HIGH) { digitalWrite(ledPin, LOW); } else { digitalWrite(ledPin, HIGH); } }[/mw_shl_code] 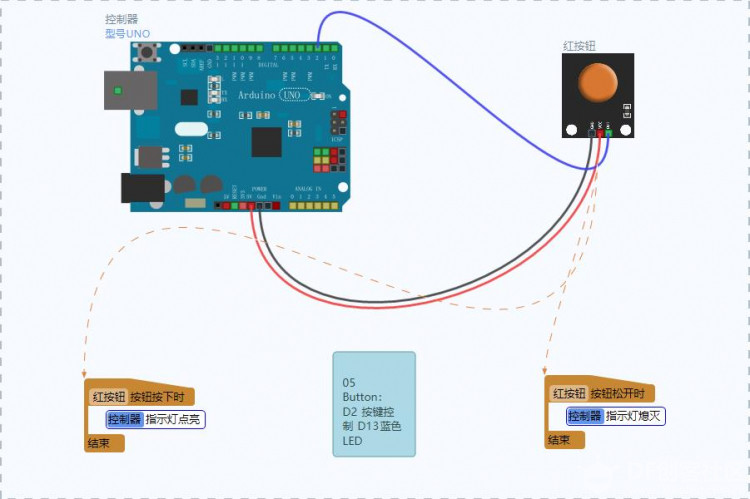 |
|
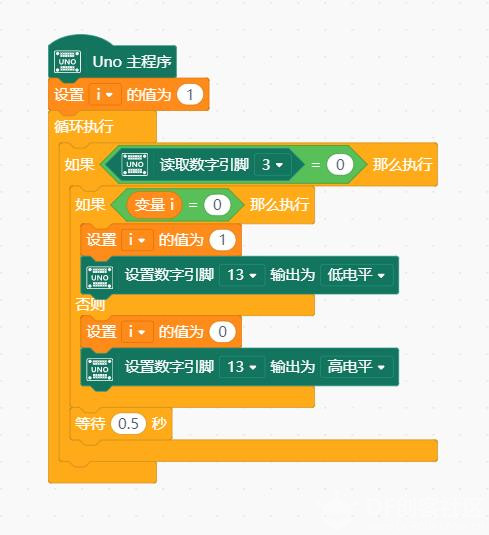
06 Button_Lock:D3 按键控制 D13 蓝色LED 自锁实验 [mw_shl_code=c,true]/* Eagler8实验程序列表 06 Button_Lock:D3 按键控制 D13 蓝色LED 自锁实验 */ int Button=3; int LED=13; boolean onoff=LOW; void setup(){ pinMode(Button,INPUT); pinMode(LED,OUTPUT); } void loop(){ if(digitalRead(Button)==HIGH) { delay(10); if(digitalRead(Button)==LOW) { digitalWrite(LED,onoff); onoff=(!onoff); delay(10); while(digitalRead(Button)==LOW) { delay(1); } } } }[/mw_shl_code] |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶








 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






