|
22244| 12
|
撸狗初体验 | 手把手教你上手 HuskyLens 哈士奇人工智能摄像头 |

 !!!二哈的 Arduino 官方库已更新,请大家直接看官方 wiki 教程!!!  直接上视频听我 BB: 下面开始编故事…… 某个周末,走在去加班的路上,脚底突然被某个东西咯噔一下,抬脚一看,竟然是……  捡起来一看……  哈士奇!哈士奇!哈士奇! 竟然是 DF 还在预售的 HuskyLens 人工智能摄像头(中文名:哈士奇) ! 这个故事告诉我们:喜欢加班的创客,运气不会太差。 # HuskyLens 功能介绍 # HuskyLens 是什么? 这里简单截取官网介绍的一部分: HuskyLens 是一款简单易用的人工智能摄像头(视觉传感器),内置 6 种功能:人脸识别、物体追踪、物体识别、巡线追踪、颜色识别、标签(二维码)识别。仅需一个按键即可完成 AI 训练,摆脱繁琐的训练和复杂的视觉算法,让你更加专注于项目的构思和实现。  详细介绍,可以查看官网说明:https://www.dfrobot.com.cn/goods-2050.html 哈士奇官方介绍视频,请直接跳转 B 站: 用 3 个单词就可以概括 HuskyLens 的特性:Click、Learn & Play。 总之:简单、易用、真香! 这么香的工具,到底该怎么玩呢?请继续往下看。 注意:以下章节偏技术性,是对体验视频的文字性详细描述,会略微无聊,请收藏后慢慢阅读。 # HuskyLens 数据读取测试 # 由于 HuskyLens 目前还没有正式上市,所以关于它的资料非常少,DF 暂时也没有放出 HuskyLens 对应的函数库,更不用说在 Mind+ 等图形化编程工具中调用了。不过相信不久,我们就可以在 Mind+ 中看到它了,到那时,它的使用就会更加简单、更加小白了! 暂时我们只能根据它的通信协议,徒手来撸代码了。 HuskyLens 默认采用串口通信,当然可以在它的设置中改成 I2C 通信。默认的串口波特率为 57600 bps,格式为 8N1( 8 位数据位、无校验、1位停止位 ),默认通信地址为 0x11。本文中,我带领大家使用掌控板来读取 HuskyLens 的数据。 当然你也可以选择使用 Arduino、Raspberry Pi、LattePanda、micro:bit 等控制器来读取 HuskyLens 的数据,原理都是一样的,就留作课后作业吧,看文本文后,你能不能用其他主控板来读取 HuskyLens 的数据呢? 电路连接图如下: 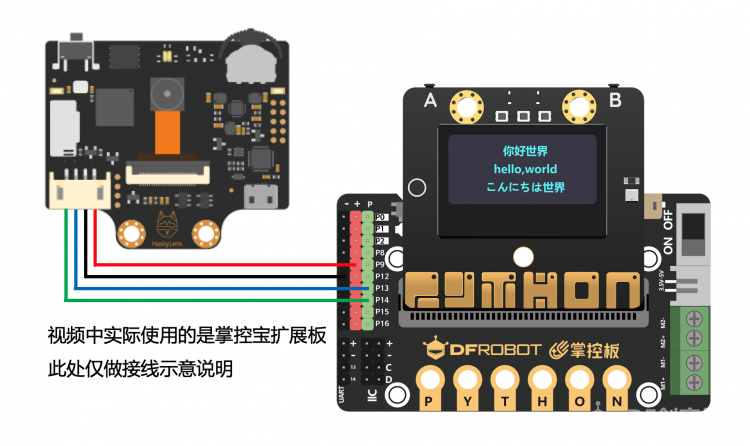 关于掌控板串口的补充说明:掌控板的主控芯片是 ESP32,ESP32 有 3 个串口,分别是 Serial、Serial1、Serial2 。Serial 我们一般用来下载程序, Serial1 默认使用了 GPIO 9 和 GPIO 10 ,但是 ESP32 的 GPIO 6~11 一般用于连接外部 Flash 芯片,所以我们这里使用 Serial2 与 HuskyLens 连接通信。另外,ESP32 可以将串口 RX 映射到几乎所有 IO 口上,TX 映射到 GPIO 0~31 上(此处没有进行验证)。所以,这里我们将掌控板 Serial2 的 RX 映射到 P14 引脚,将 TX 映射到 P13 引脚。(参考网址:https://blog.csdn.net/Naisu_kun/article/details/86004049) 我们来看一下 HuskyLens 的通信协议。它主要有两种模式,正如视频中看到的那样,大部分情况下, HuskyLens 屏幕上会显示一个方框(Block 模式),在巡线模式下,它会显示一个箭头(Arrow 模式)。这两种模式下,数据的长度和格式基本是一致的,这里我们以 Block 模式为例进行讲解,Arrow 模式原理一样,此处不再赘述。 我们来看一下它的数据格式,可以看到它是以 0x55 和 0xAA 开头的一串数据,紧接着是它的通信地址 Address、数据长度 Data Length、命令代码 Command,以及我们最关心的数据 Data。最后是一个校验位。  每个数据的含义如下: Block 模式: 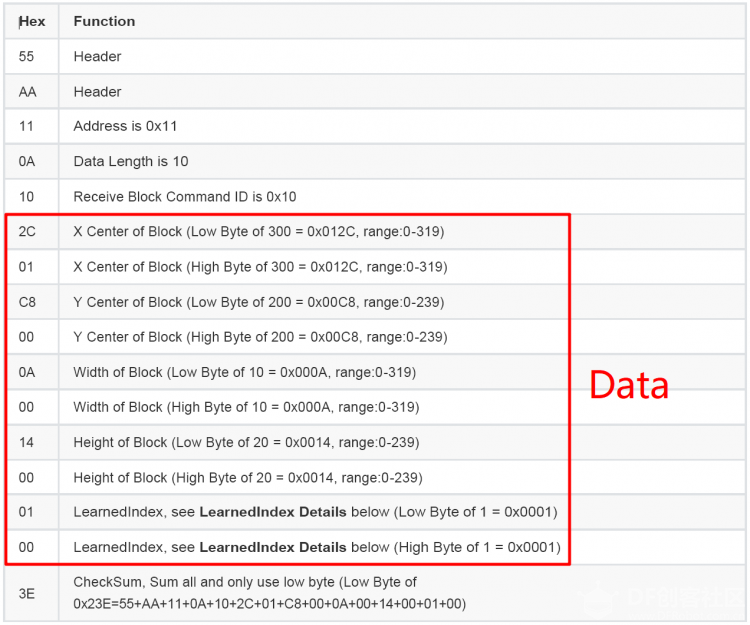 Arrow 模式: 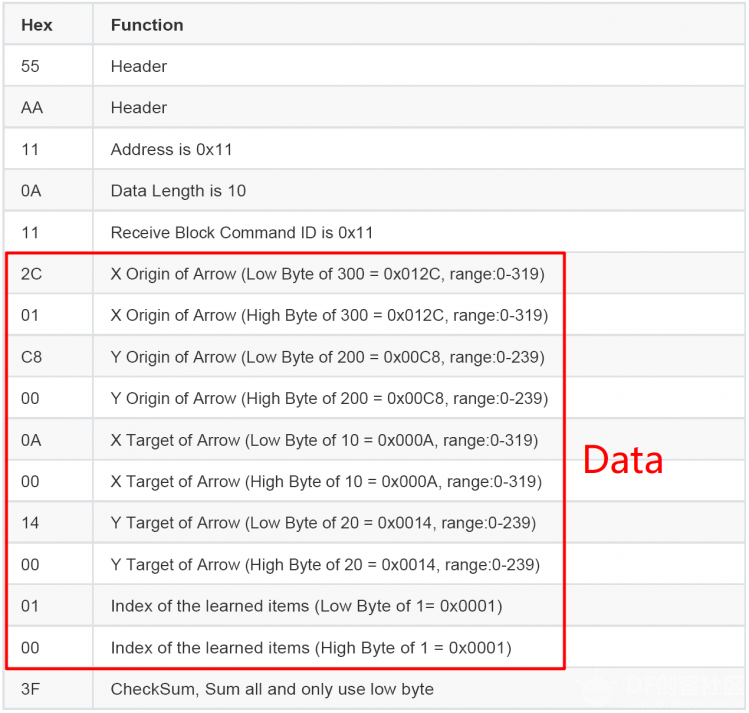 上面两个表格中红框框出来的是相应的数据 Data 1 ~ Data n,其中:
我们根据通信协议,编写程序来读取一下 HuskyLens 返回的数据。 首先打开 Mixly 自带的 Arduino IDE,选择 Arduino HandBit (掌控板)进行编程。 最新版 Mixly 1.0 下载地址: https://mixly.readthedocs.io/zh_CN/latest/basic/02Installation-update.html 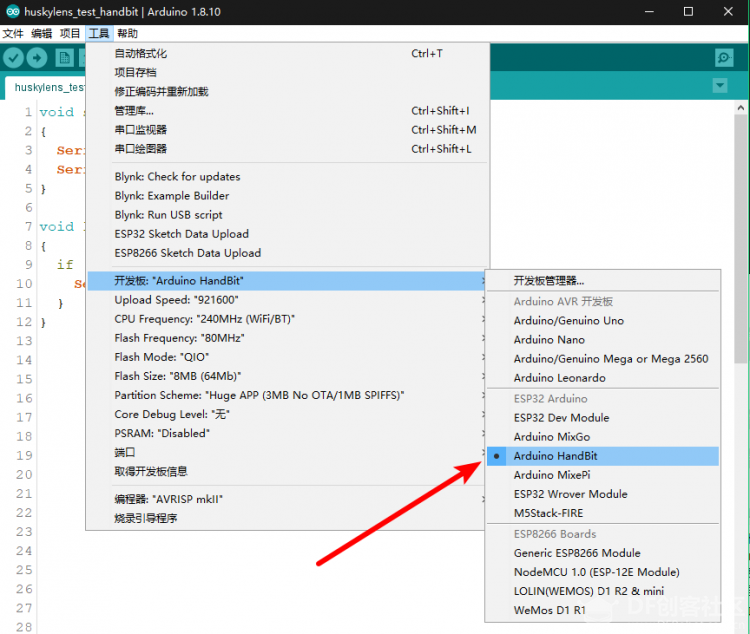 程序如下: [mw_shl_code=cpp,true]void setup() { Serial.begin(57600); Serial2.begin(57600, SERIAL_8N1, P14, P13); } void loop() { if (Serial2.available() > 0) { Serial.println(Serial2.read(), HEX); } }[/mw_shl_code] 将程序上传到掌控板,打开串口监视器,可以看到会返回类似下图中的数据: 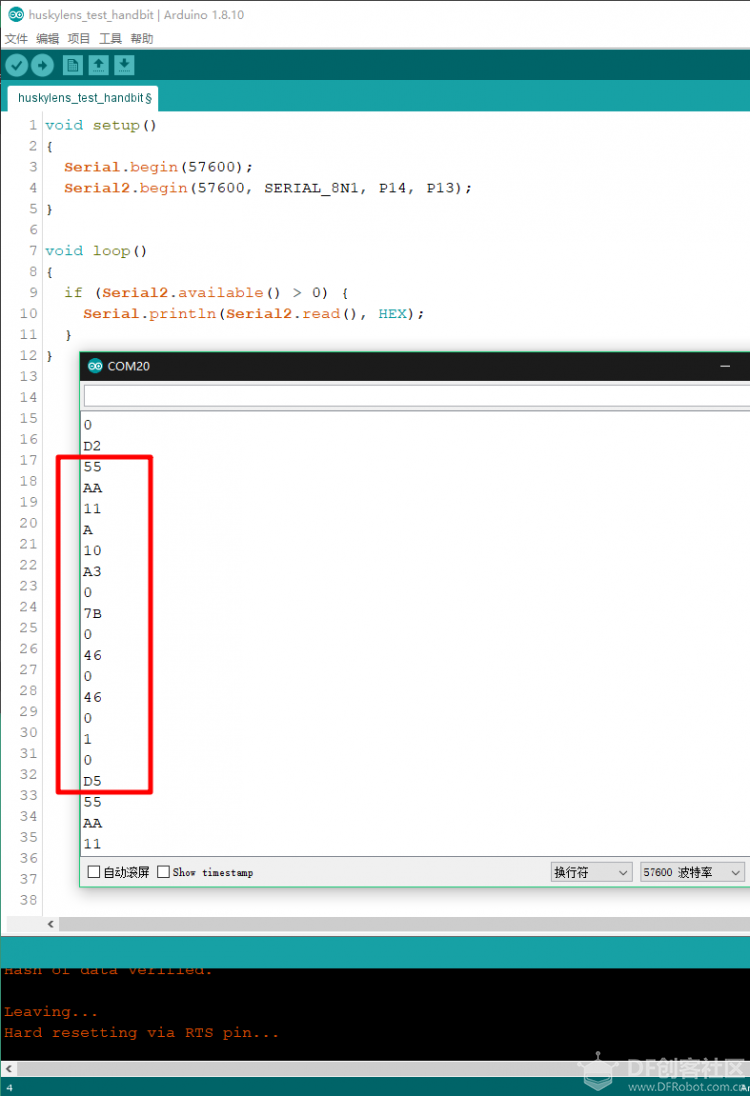 但是这些数据代表着什么意思呢?我们将关键数据圈出来:0x55、0xAA、0x11、0x0A、0x10、0xA3、0x00、0x7B、0x00、0x46、0x00、0x46、0x00、0x01、0x00、0xD5。其中:
至此,我们就完成了 HuskyLens 数据的简单读取。 但是每次都要这么去读取数据,然后再进行手工计算么?这还怎么做人工智能项目啊? 当然不是的,我们发现,读取这些数据就是都是一件件重复的事情,而程序最擅长的就是做重复的事情了。 # HuskyLens 数据解析 # 我们将上面的程序简单调整一下,duang~ 就完成了!(程序源代码详见文末下载链接,建议配套代码一起阅读下文)  我们先定义了一些变量,用来存放数据。这些变量的名字,基本可以自解释其含义,此处不再赘述说明。 [mw_shl_code=cpp,true]#define LENG 15 // 0x55 + 15 bytes equal to 16 bytes unsigned char buf[LENG]; int xCenterOrXOrigin = 0; int yCenterOrYOrigin = 0; int widthOrXTarget = 0; int heightOrYTarget = 0; int learnedIndex = 0;[/mw_shl_code] 在 setup() 中,主要是对两个串口进行初始化: [mw_shl_code=cpp,true] void setup() { Serial.begin(57600); Serial2.begin(57600, SERIAL_8N1, P14, P13); }[/mw_shl_code] 然后在 loop() 中,不断去读取掌控板串口 2(Serial2)中返回的数据。首先要判断第 1 个读到的数据是否是默认的 Header 0x55,我们用了 find() 函数: [mw_shl_code=cpp,true]// Header // Read data until get the first header of data packet 0x55 if (Serial2.find(0x55)) { // ...... }[/mw_shl_code] 如果读取到 0x55,那么就把剩下的 15 个数据都读取进来,并存储到 buf 变量中。因为一个有效的通信命令共 16 个数据,大家可以在通信协议中数一下。 [mw_shl_code=cpp,true]// Read the next 15 data Serial2.readBytes(buf, LENG);[/mw_shl_code] 接着去检查第 2 个数据是否是默认的 Header 2 0xAA。这里需要注意的是,我们并没有把第 1 个 Header 数据 0x55 存储到 buf 变量中,所以 buf[0] 不是 0x55,而是 0xAA。 [mw_shl_code=cpp,true]// Header 2 // Check the second header of data packet 0xAA if (buf[0] == 0xAA) { // ...... }[/mw_shl_code] 如果第 2 个数据也是默认的包头的话,再去对剩下的数据进行校验,这里调用校验和函数 checkSum(),具体这个函数怎么实现的,下面再讲。 [mw_shl_code=cpp,true]// Checksum if (checkSum(buf, LENG)) { // ...... } else { Serial.println("Checksum Errorrrrr!"); }[/mw_shl_code] 校验和通过后,就可以对数据进行处理和计算了。在下面的程序中,我们先把原始数据打印出来: [mw_shl_code=cpp,true]// print the command list Serial.print(0x55, HEX); Serial.print(" "); for (int i = 0; i < LENG; i++) { Serial.print(buf, HEX); Serial.print(" "); } Serial.println();[/mw_shl_code] 然后通过 5 个函数分别去计算 Data 中的几个值。最后再将这些数据在串口监视器中打印出来。 [mw_shl_code=cpp,true]// get the values xCenterOrXOrigin = getX(buf); yCenterOrYOrigin = getY(buf); widthOrXTarget = getWidthOrXTarget(buf); heightOrYTarget = getHeightOrYTarget(buf); learnedIndex = getLearnedIndex(buf); // print the values Serial.print("x: "); Serial.print(xCenterOrXOrigin); Serial.print(" "); Serial.print("y: "); Serial.print(yCenterOrYOrigin); Serial.print(" "); Serial.print("width: "); Serial.print(widthOrXTarget); Serial.print(" "); Serial.print("height: "); Serial.print(heightOrYTarget); Serial.print(" "); Serial.print("learnedIndex: "); Serial.print(learnedIndex); Serial.print(" "); Serial.println(); Serial.println("-----------------------------"); Serial.println();[/mw_shl_code] 这样我们就把数据读取出来啦。 # 几个函数说明 # ## checkSum() checkSum() 函数的功能就是校验读取到的数据是否正确。只要简单讲读到的数据相加,并最终取和的低 8 位,检查是否和读到的最后一个数据相等即可。相等的话,将标记变量 receiveflag 赋值为 1 即可,否则赋值为 0,并返回 receiveflag 的结果。 [mw_shl_code=cpp,true]// check sum char checkSum(unsigned char *buf, char leng) { char receiveflag = 0; int sum = 0; int sumLow = 0; for (int i = 0; i < (leng - 1); i++) { sum = sum + buf; } sum = sum + 0x55; sumLow = sum & 0x00FF; if (sumLow == buf[leng - 1]) { sum = 0; receiveflag = 1; } return receiveflag; }[/mw_shl_code] ## getX() ## getY() ## getWidthOrXTarget() ## getHeightOrYTarget() ## getLearnedIndex() 这 5 个函数的原理基本一致,其函数名基本可以自解释含义,此处也不再赘述解释每个函数的功能。 这里以第 1 个函数 getX() 为例,介绍这几个函数内部的原理。 通过查看通信协议,我们可以知道,X 坐标的数值,分别存储在 buf 变量中的第 5 个和第 6 个(实际是完整数据的 6 个和第 7 个数据,但是 buf 变量中没有存储第 1 个数据 0x55),所以这里取 buf[4] 和 buf[5] 来进行计算即可。 由于是 16 进制的数据,所以可以通过移位进行计算,当然这里的 << 8 等价为 * 256。最后将计算出来的值返回即可。 [mw_shl_code=cpp,true]// X Center of Block [Block mode] // or X Origin of Arrow [Arrow mode: Line tracking mode] int getX(unsigned char *thebuf) { int xCenterValue; // calculate X Center of Block value xCenterValue = ((thebuf[5] << 8) + thebuf[4]); return xCenterValue; }[/mw_shl_code] 其他几个数据,也是同样道理,只要取对应的数据位进行计算即可。 # 总结 # 通过这一章节,我们根据 HuskyLens 的通信协议,把 HuskyLens 返回的数据都读取出来了。那么我们可以利用这些数据做一些什么有趣好玩的事情呢? 物体追踪,人脸识别,物体识别,巡线追踪,颜色识别,标签识别等功能,要怎么用呢? 交互手势控制、自主机器人、智能门禁、交互式玩具等又要怎么实现呢? 我们下期见! # 代码下载 # 请到知识星球下载本教程对应的源代码:https://t.zsxq.com/RB6EaYf  # 广告时间 # 最后再打个小广告:欢迎关注我的个人公众号“铁熊玩创客”,不 kan 定 xin 期 qing 更新创客制作、技术教程以及一些胡言乱语。  # 往期作品 # - 掌控超声波传感器?可能没你想的那么简单:https://mc.dfrobot.com.cn/thread-296500-1-1.html - 首发测评 | 掌控板 V1.1 测试版语音识别初体验:https://mc.dfrobot.com.cn/thread-296662-1-1.html- 学会掌控板 + Siri 语音控制,只要半小时:https://mc.dfrobot.com.cn/thread-297311-1-1.html - 掌控板+麦轮,Mixly + Blynk,让你的麦轮战甲嗨炸全场!https://mc.dfrobot.com.cn/thread-297868-1-1.html ## 创客技巧 - 创客项目缺少高颜值电路图?看这里就对了:https://mc.dfrobot.com.cn/thread-289862-1-1.html - 小白也能学会的激光切割创意盒子设计方法:https://mc.dfrobot.com.cn/thread-276550-1-1.html ## 桌面机器人 - 桌面萌宠 Pando,这个机器人靠卖萌为生好多年:https://mc.dfrobot.com.cn/thread-35162-1-1.html - 桌面萌宠 Pandy,谁说智能车不能卖萌:https://mc.dfrobot.com.cn/thread-36721-1-1.html - 吃货战车:谁说泡面只能用来填肚子:https://mc.dfrobot.com.cn/thread-34679-1-1.html - 纯野生黑科技,分分钟教你自制最skr的全向麦熊小车:https://mc.dfrobot.com.cn/thread-268968-1-1.html - 不会垃圾分类?教你制作一个瓦力机器人来帮你:https://mc.dfrobot.com.cn/thread-296340-1-1.html ## 智能家居 - Hey Siri, 打开 HAY 旋转灯:https://mc.dfrobot.com.cn/thread-26865-1-1.html - Hey Siri,请告诉我传感器数据:https://mc.dfrobot.com.cn/thread-28859-1-1.html ## 创意生活 - HAY,你好 ── DIY HAY旋转灯:https://mc.dfrobot.com.cn/thread-26212-1-1.html - DIY 你的专属酷炫照片投影灯:https://mc.dfrobot.com.cn/thread-26900-1-1.html - 好色灯:你们吸猫,我吸色:https://mc.dfrobot.com.cn/thread-34483-1-1.html - DIY 你的专属酷炫照片投影灯:https://mc.dfrobot.com.cn/thread-26900-1-1.html - 没有什么问题是猜拳不能解决的:https://mc.dfrobot.com.cn/thread-38060-1-1.html - 律动头饰皇冠:每个女孩心中都有一个公主梦:https://mc.dfrobot.com.cn/thread-267927-1-1.html ## 学生作品 - 戒烟帽:https://mc.dfrobot.com.cn/thread-280204-1-1.html - 体感骑行安全帽:https://mc.dfrobot.com.cn/thread-280093-1-1.html ## HCRbot 机器人(SLAM) - HCRbot 系列 1──HCRbot 机器人简介:https://mc.dfrobot.com.cn/thread-26938-1-1.html - HCRbot 系列 2──HCRbot 硬件介绍与设置:https://mc.dfrobot.com.cn/thread-26939-1-1.html - HCRbot 系列 3──HCRbot 上位机 PC 端软件设置:https://mc.dfrobot.com.cn/thread-26975-1-1.html - HCRbot 系列 4──HCRbot下位机设置(树莓派版):https://mc.dfrobot.com.cn/thread-27020-1-1.html - HCRbot 系列 5──HCRbot下位机设置(Odroid XU4版):https://mc.dfrobot.com.cn/thread-27161-1-1.html - HCRbot 系列 6──HCRbot 底层驱动 OpenCR 设置:https://mc.dfrobot.com.cn/thread-27296-1-1.html - HCRbot 系列 7──启动 HCRbot 机器人:https://mc.dfrobot.com.cn/thread-28248-1-1.html - HCRbot 系列 8──远程控制 HCRbot 机器人:https://mc.dfrobot.com.cn/thread-29354-1-1.html - HCRbot 系列 9──控制 HCRbot 机器人绘制平面地图(SLAM):https://mc.dfrobot.com.cn/thread-29936-1-1.html |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶





 活跃会员
活跃会员
 老版主限定
老版主限定
 创作达人
创作达人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






