|
19640| 12
|
[项目] 【自制无人机】Arduino+无刷电机+PID实现平衡木 |

本帖最后由 云天 于 2020-8-8 22:40 编辑 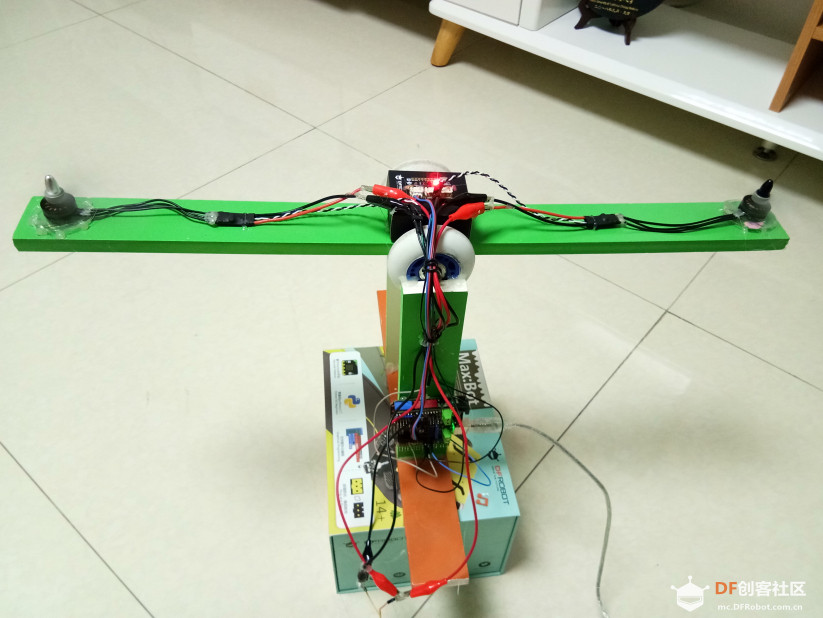  之前,一直用Arduino和无刷电机的电调纠缠。先说正解,【自制无人机】“辛”路历程(六)电调中提到的控制程序是没有问题的。 [mw_shl_code=c,false]#include <Servo.h> // Using servo library to control ESC Servo esc; // Creating a servo class with name as esc int val; // Creating a variable val void setup() { esc.attach(9); // Specify the esc signal pin,Here as D9 esc.writeMicroseconds(1000); // initialize the signal to 1000 Serial.begin(9600); } void loop() { val= analogRead(A0); // Read input from analog pin a0 and store in val val= map(val, 0, 1023,1000,2000); // mapping val to minimum and maximum(Change if needed) Serial.println(val); esc.writeMicroseconds(val); // using val as the signal to esc }[/mw_shl_code] 【Mind+代码】实现控制无刷电机  这个项目中断了很长一段时间,原因是我不明白,1、Arduino有时能通过电调控制电机,有时不能,问题出在哪?2、也在于我只有一个无刷电机和一个电调,用不了替换法,不知是哪个出问题?3、还有就是,有网友说,可以用Arduino程序通过电调调整电机的油门,我一直做不好。 【调整油门】 看过这个帖子“MTO1804无刷电机引发的悲惨经历之二——电调优化”后,我测试出我的电调是没有问题的。我把测试过程简单的陈述一下: 1、下载软件叫做BLHeliSuite 进入下载页面,记住要下载BLHeliSuite16714902。 2、首先使用Arduino Uno(其他大多数Arduino板也行)连接到电脑,识别后选中Arduino的接口,如下图设置: 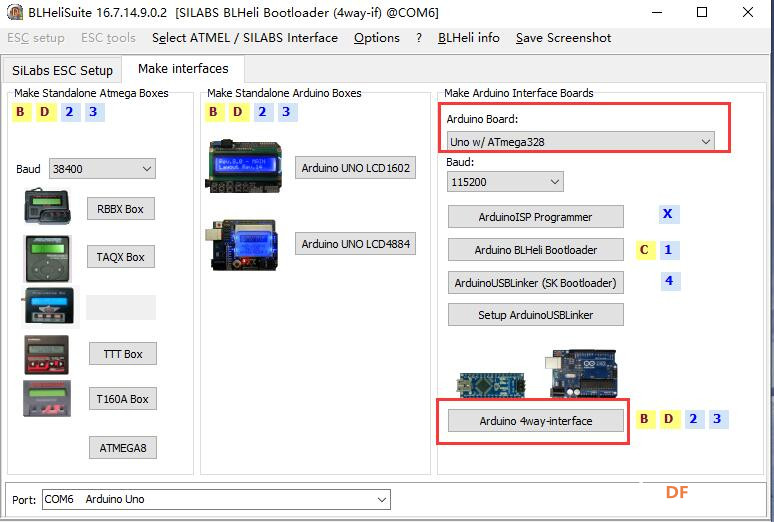 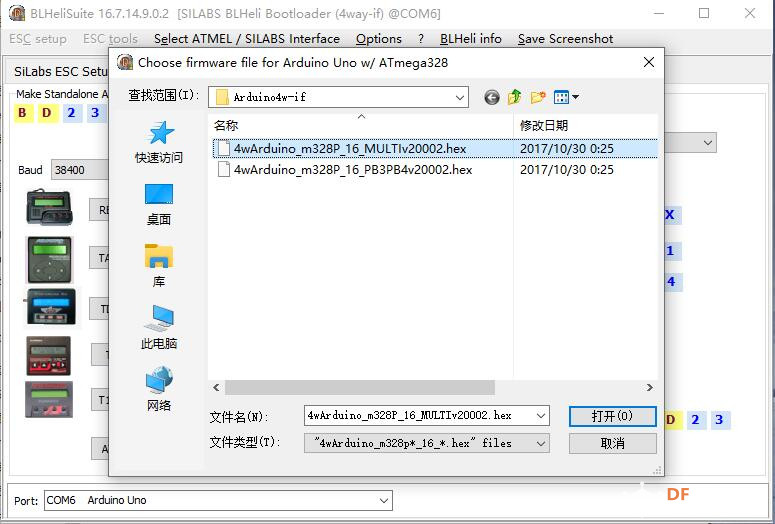 3、在ESC Setup标签中线选择正确的Interface 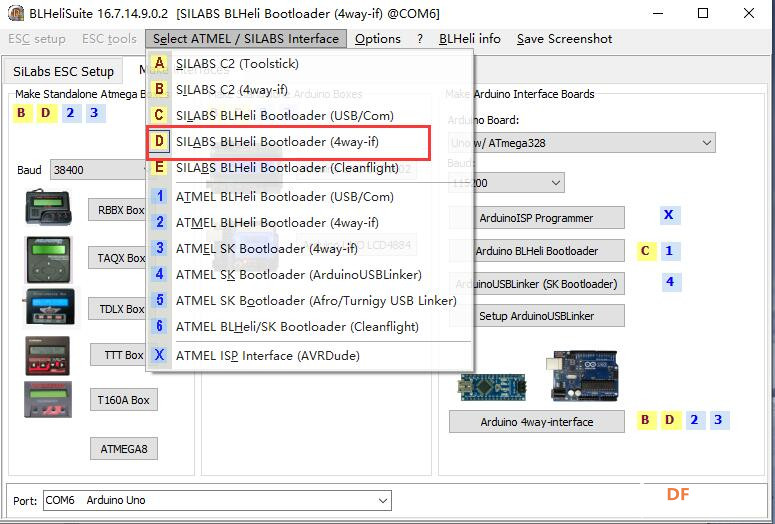 4、选择正确的Arduino接口,然后点击Connect,再点Check 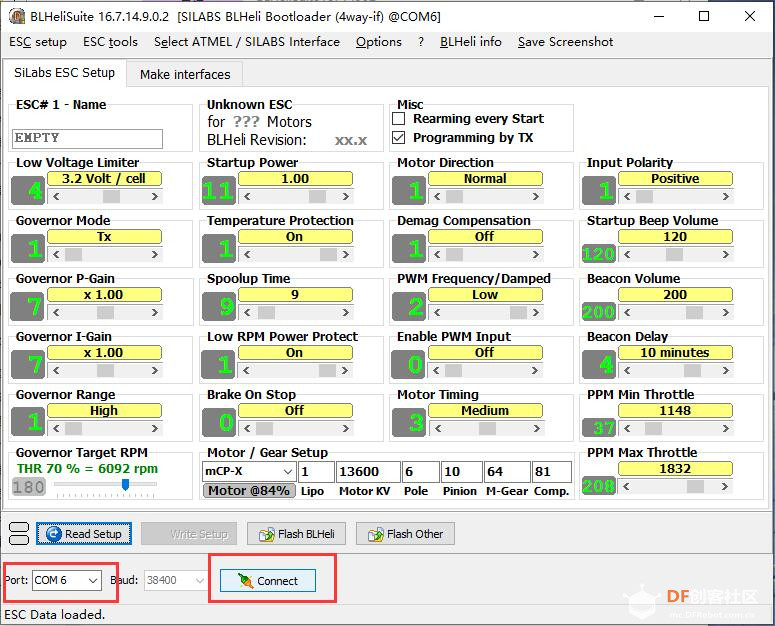 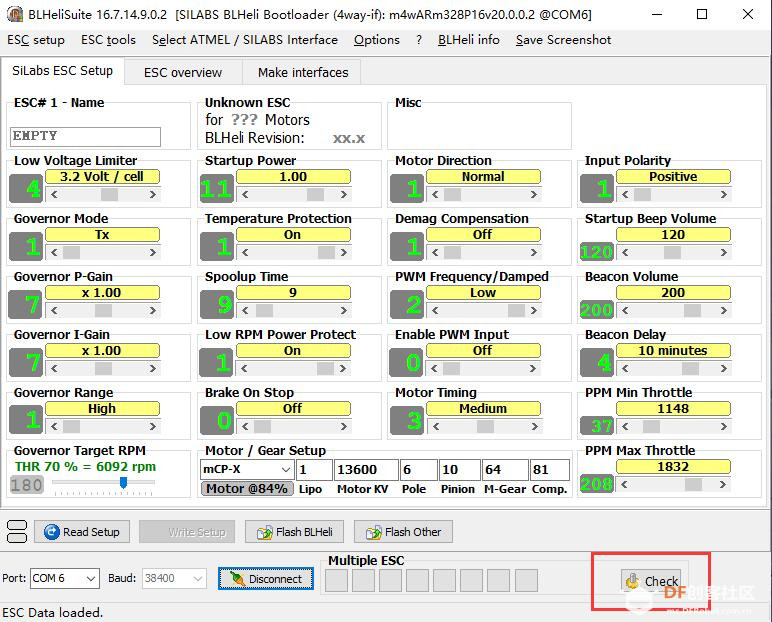 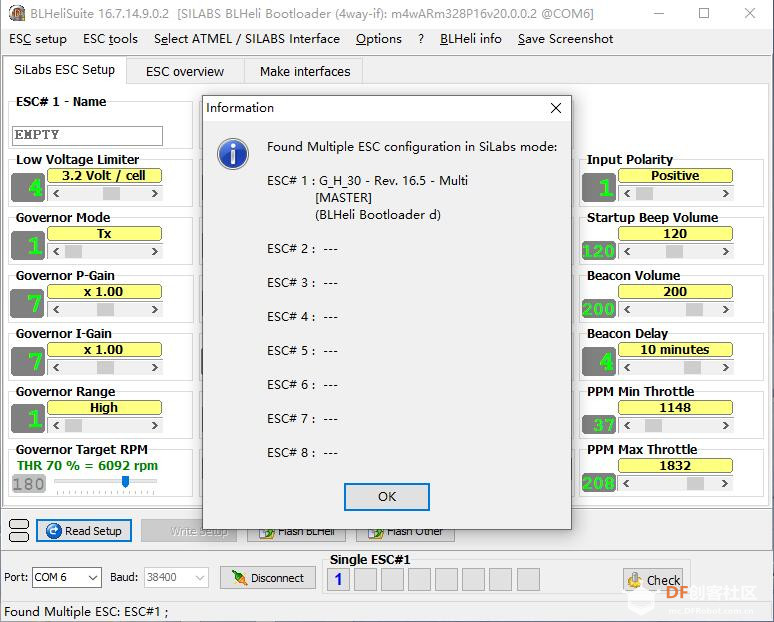 5、正确识别 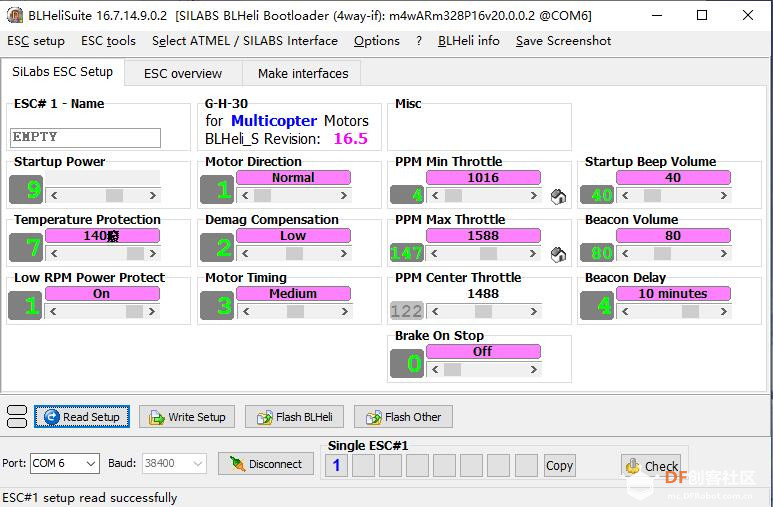 注意:电调的白色Sig线接到Uno的D11,黑色的Gnd接Uno的地线,连接的时候一般先插信号线,后插电源线,断开连接的时候则先拔电源线,再拔信号线。电调由3s锂电池供电,不用和Arduino共地。 至此,我可以调整电机油门了。 【替换法】  我又从DF商城上买了三个MTO1804无刷电机  可我怎么买了三个CW电机,三个!三个!三个!我手里的是一个CCW电机。(CW和CCW都表示旋转的方向,【CW】clockwise 的缩写,表示顺时针旋转【CCW】counter-clockwise的缩写,表示逆时针旋转) 通过电调与电机交替测试,测试出电调是好的,电机是坏的。测试过程中,又一个电机被我玩坏了。怎么坏的?都是螺丝惹的祸。  新坏的  之前弄坏的  热缩管被螺丝穿透   新坏的,用导线连接,并用导电液修补连接处。  之前坏的可直接用焊上。 至此,两电机修好。一,我认为弄坏两电机,我个人责任最大;二,我同时认为设计上出存在缺陷。 【三轴加速】 测试MMA7361三轴加速度传感器,MIND+ 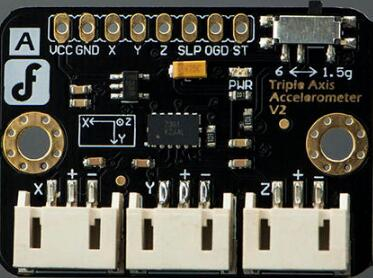   X轴接在A0上,测得平衡位置,值为330左右。 【平衡木】  两电机电调分别接在9,10口上。 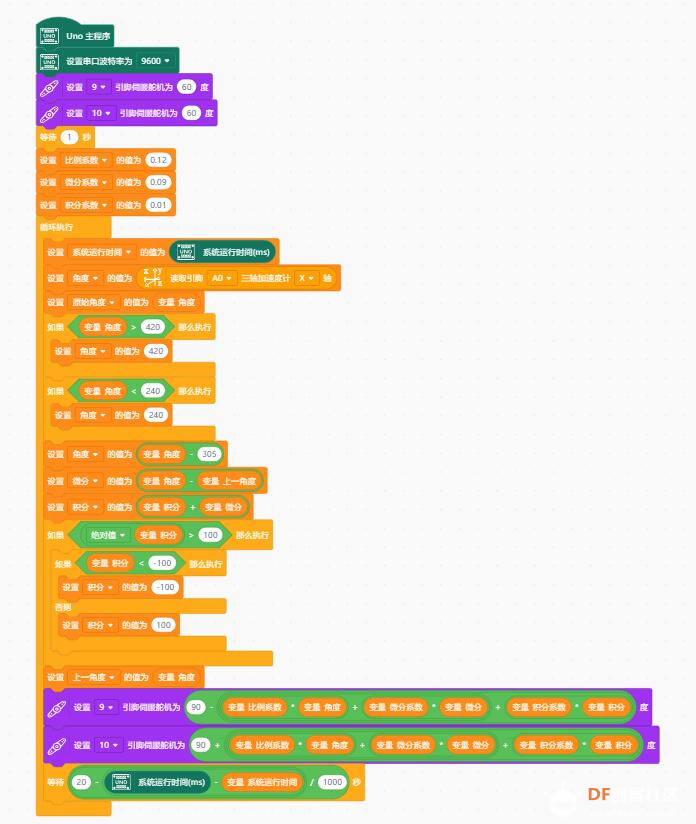 程序中使用PID算法。 【PID算法】 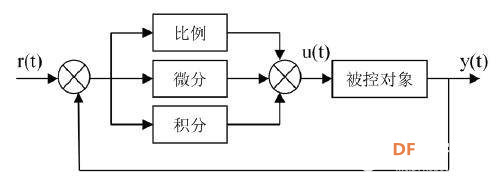 可参考如下帖子: PID无刷电机控制教程丨Arduino控制丨无人机测试小实验 【演示视频】 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶




 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创客造
创客造
 编辑选择奖
编辑选择奖
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






