|
47046| 52
|
[项目] 【Arduino】168种传感器系模块列实验(163)---BMI160 六轴陀螺仪 |

|
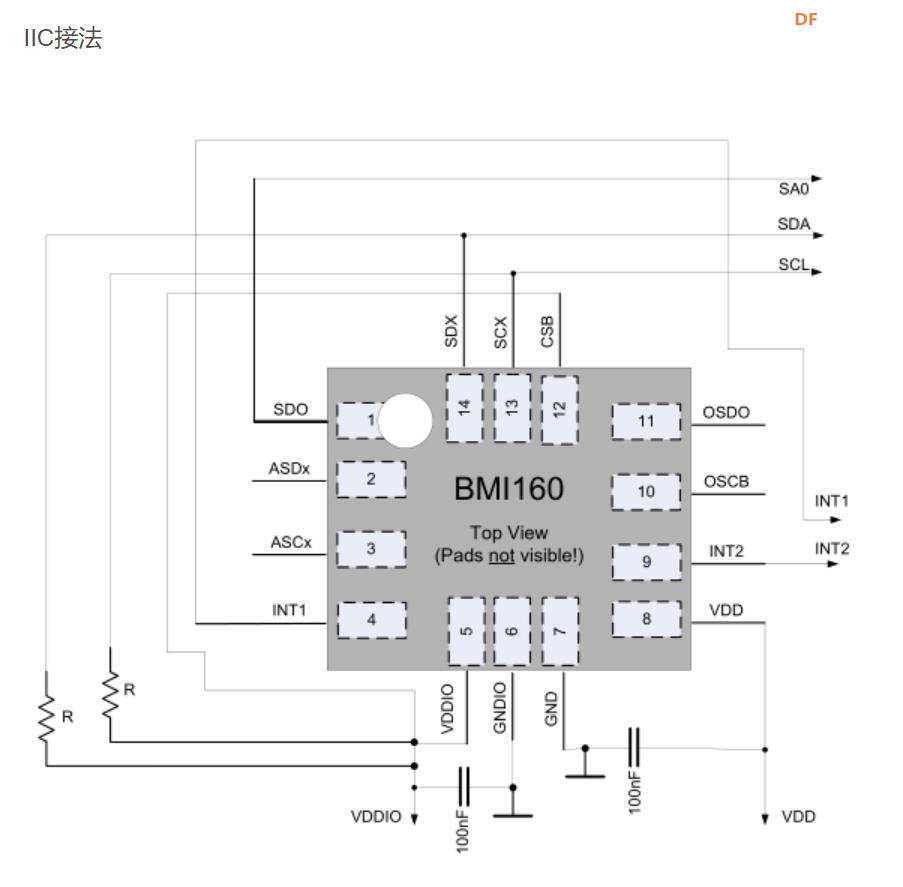
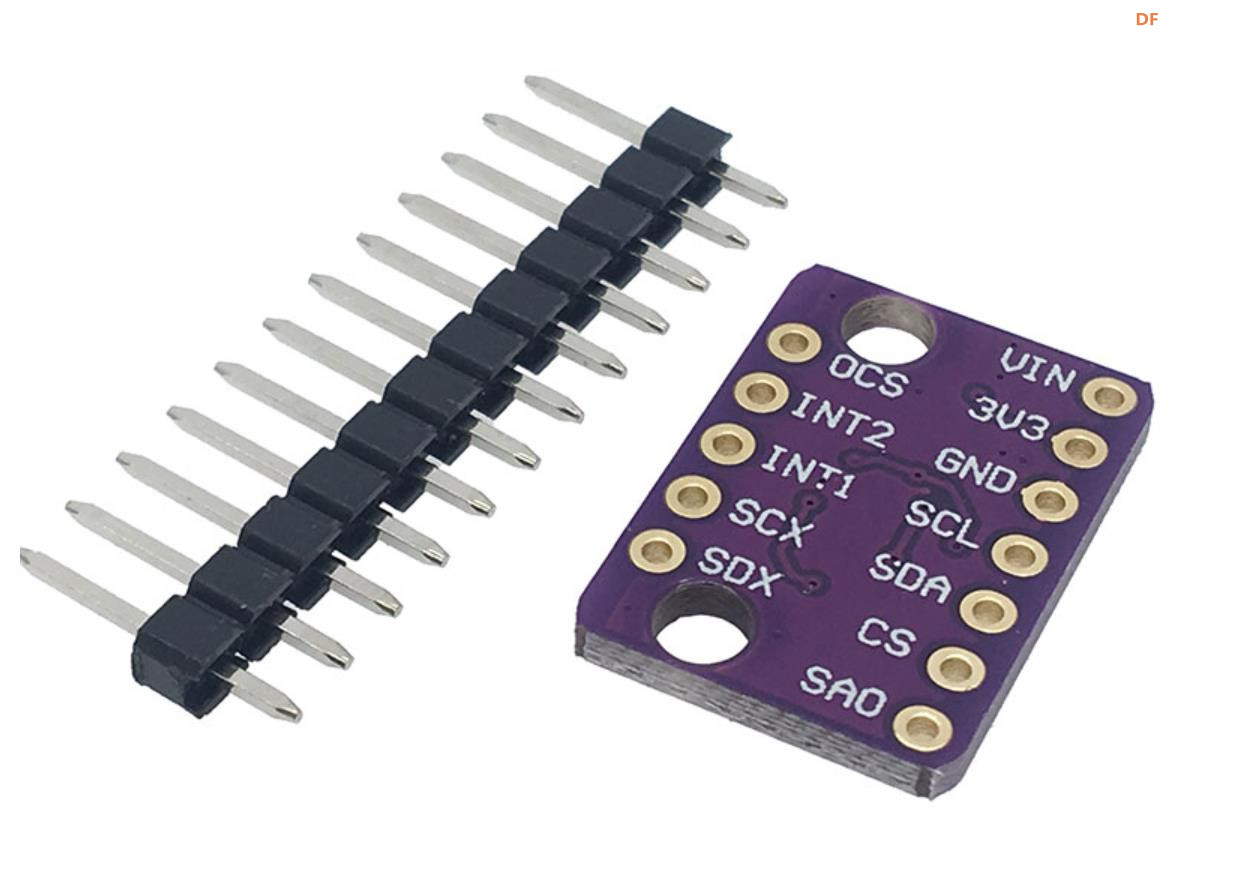
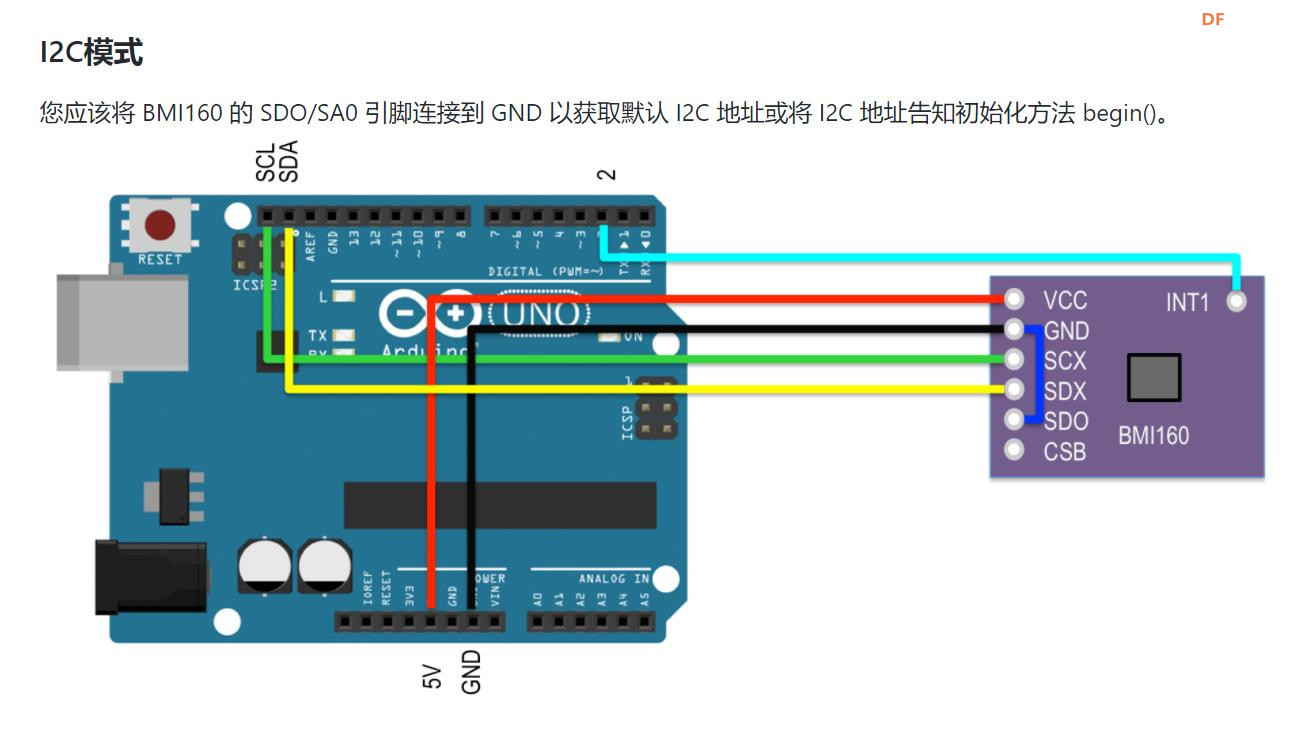
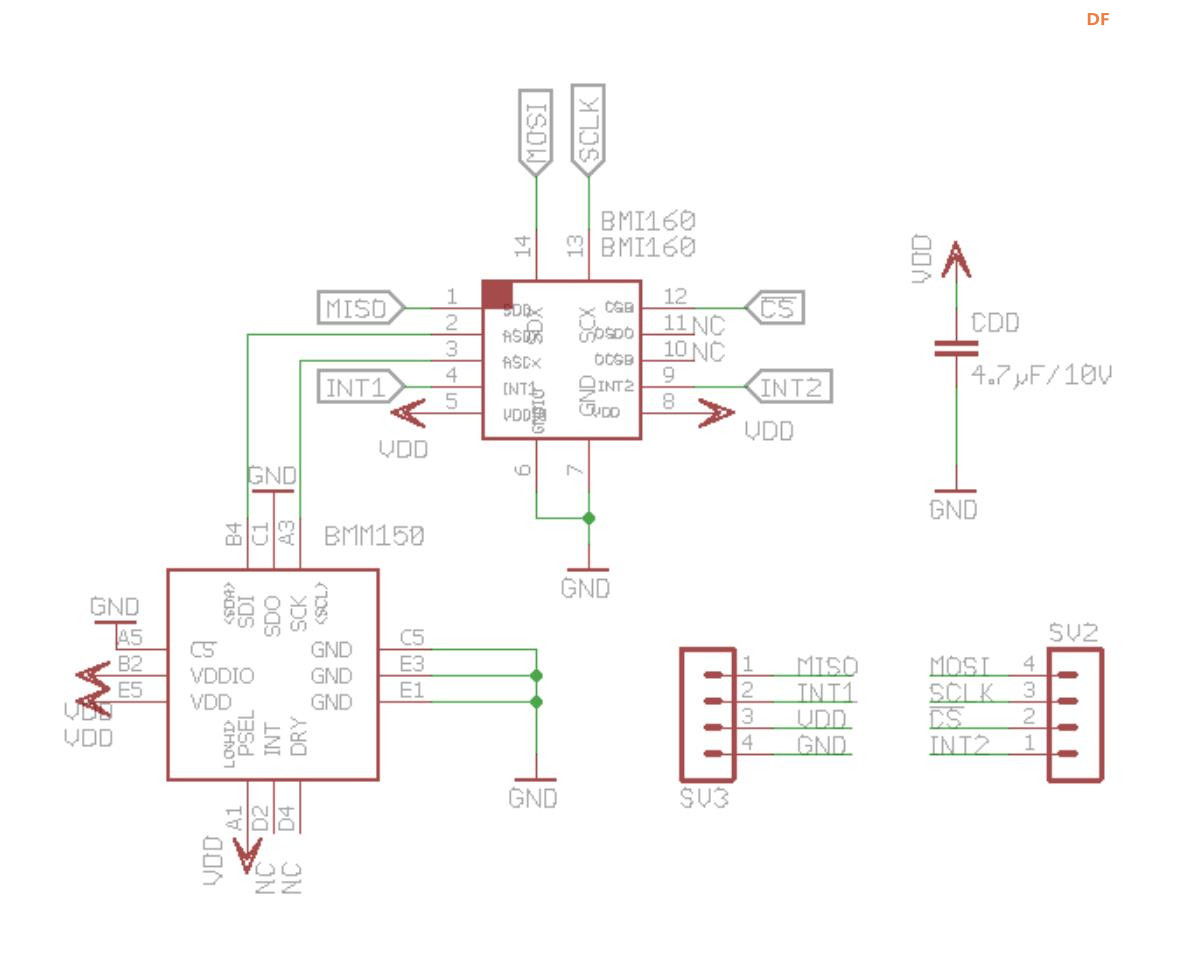
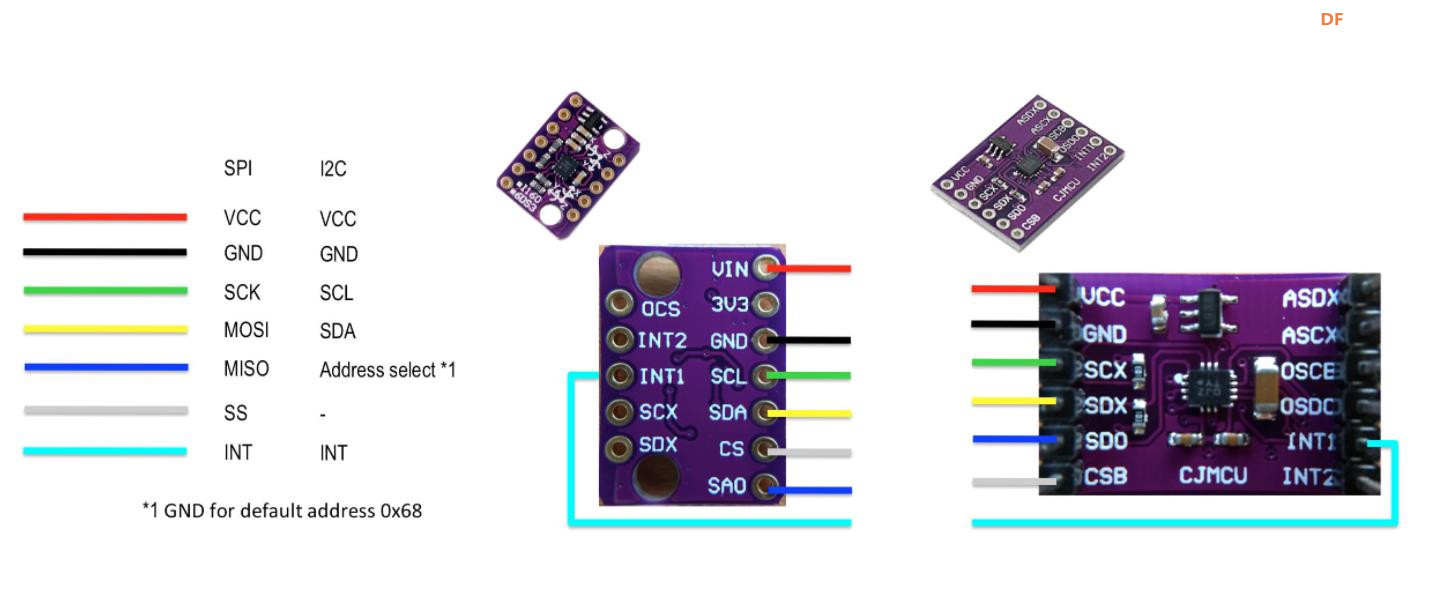
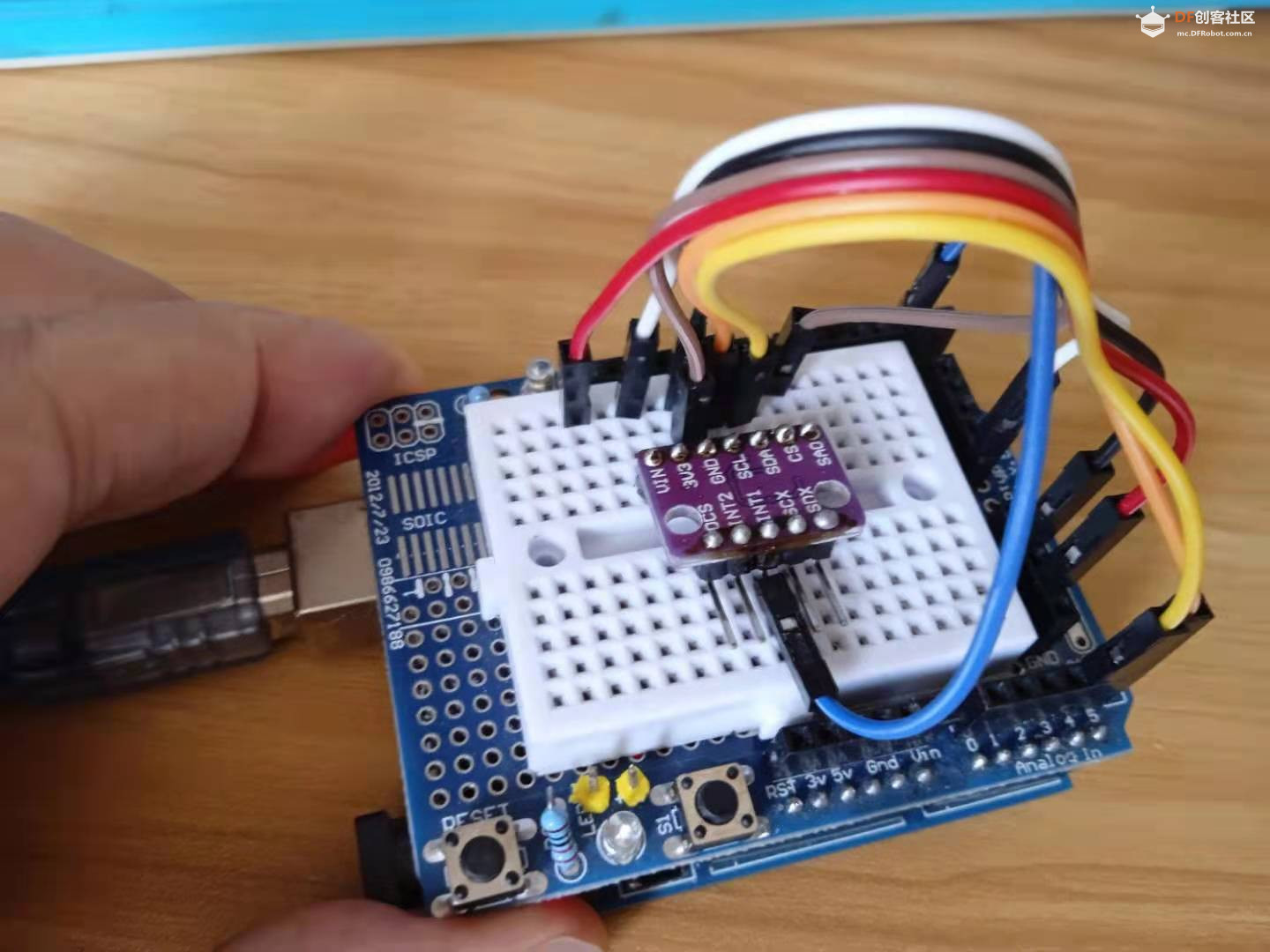
本帖最后由 驴友花雕 于 2021-9-8 21:02 编辑 项目之四:从硬件 bmi160 读取计步器 I2C地址: 0x68:将 BMI160 的 SDIO 引脚连接到 GND,即默认 I2C 地址 实验接线: BMI160 UNO VIN 5V GND GND SCL A5 SDA A4 SAO GND INT1 D2 实验开源代码 |
|
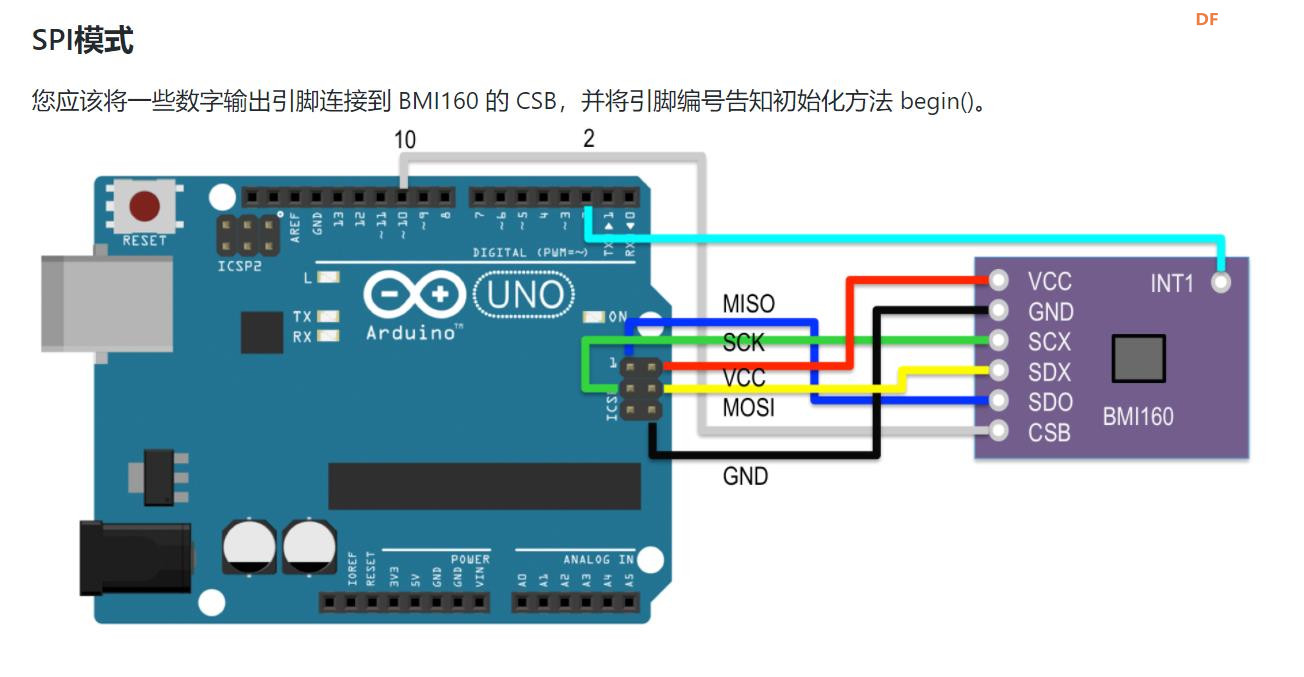
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程) 实验一百六十三:BMI160 6轴惯性运动传感器 16位3轴加速度+超低功耗3轴陀螺仪 I2C/SPI 14LGA 项目之九:低功耗模式计步器 通过 setStepPowerMode 设置计步器功耗模式(stepNormalPowerMode 表示正常模式,stepLowPowerMode 表示低功耗模式) 实验开源代码 |
|
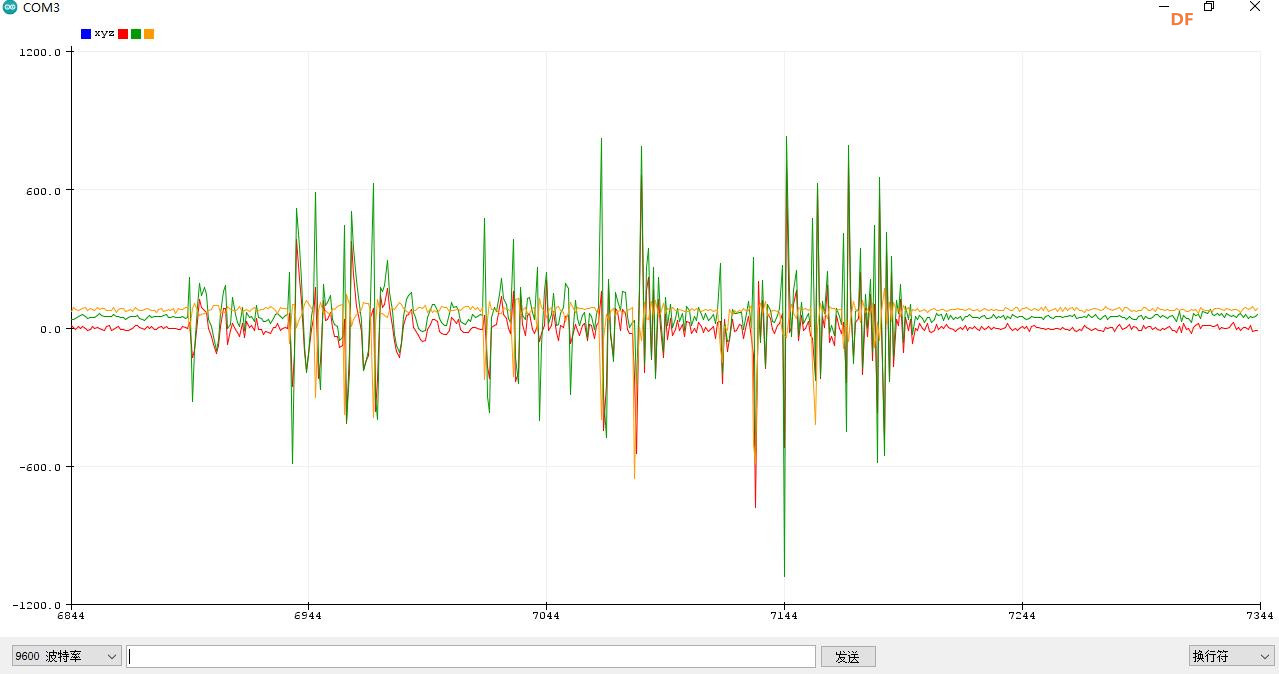
本帖最后由 驴友花雕 于 2021-9-8 19:55 编辑 项目之五:获取陀螺仪传感器的数据 实验开源代码 |
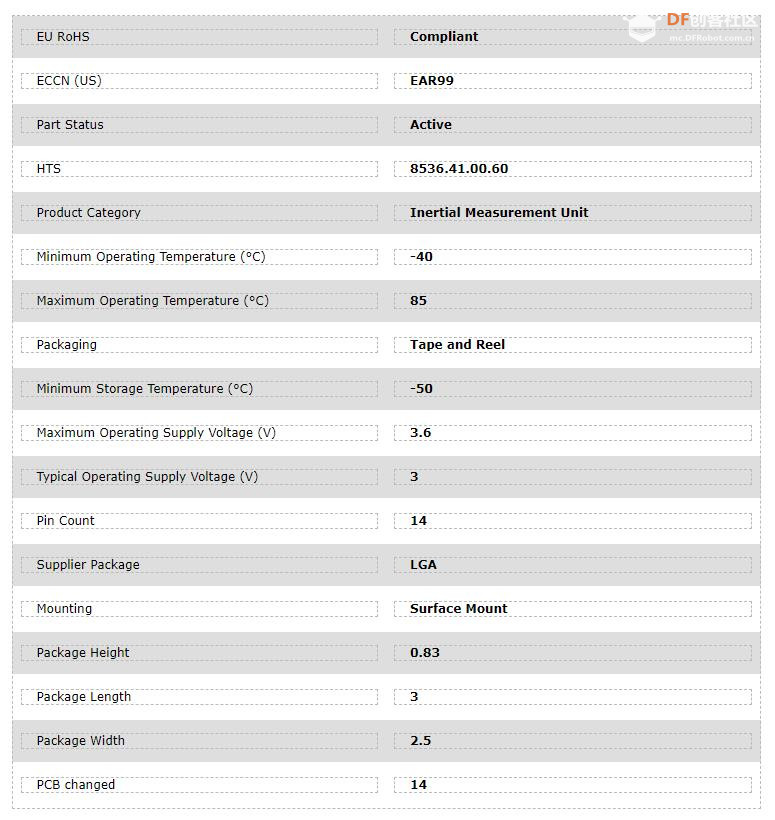
 博世BMI160 Bosch Sensortec公司推出的最新BMI160惯性测量单元,将最顶尖的16位3轴重力加速度计和超低功耗3轴陀螺仪集成于单一封装。采用14管脚LGA封装,尺寸为2.5×3.0×0.8mm3。当加速度计和陀螺仪在全速模式下运行时,耗电典型值低至950µA,仅为市场上同类产品耗电量的50%或者更低。 Bosch BMI160专为智能手机、平板电脑、可穿戴设备设计,内置智能计步算法,可通过寄存器直接读取步数。内置的3轴加速度和3轴陀螺仪可以实现跑步,健身等运动检测。内置LDO电源管理芯片,支持3.2~6V宽电压供电,并且板载I2C电平转换电路,兼容Arduino 3.3V以及5V的控制器直接驱动。 |
|
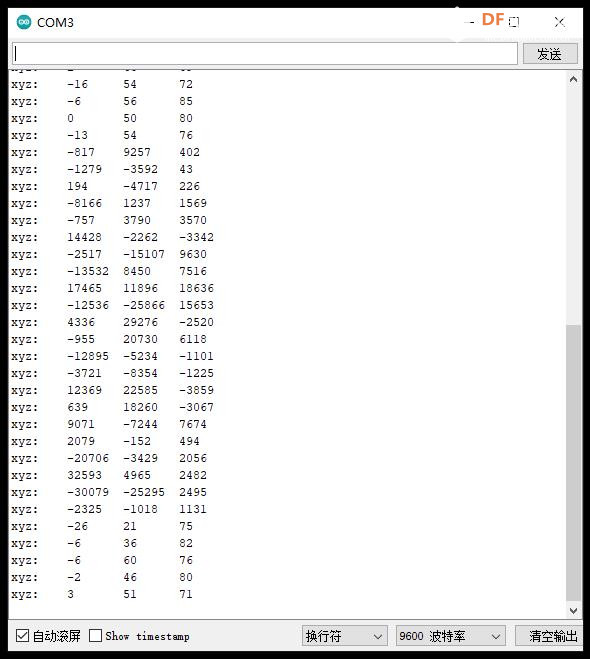
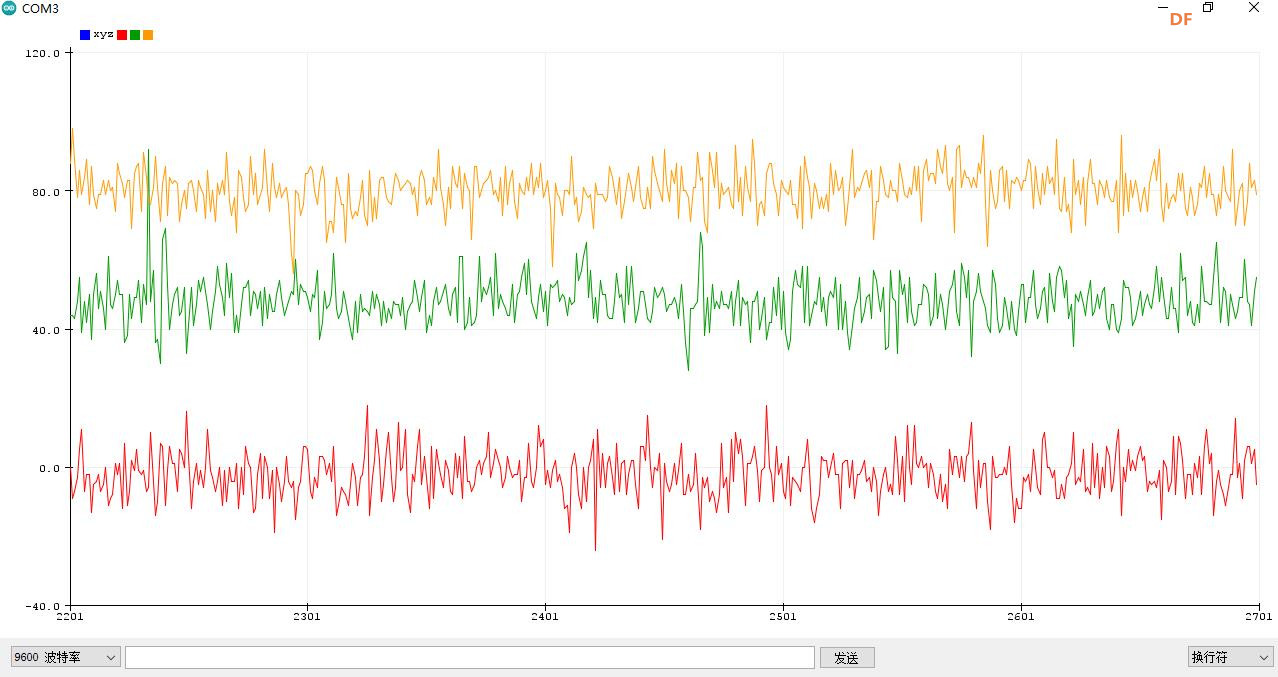
本帖最后由 驴友花雕 于 2021-9-8 19:57 编辑 项目之一:动态读取陀螺仪 x/y/z 值 实验开源代码 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶



 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






