|
|
[项目] 【Arduino】168种传感器系模块列实验(163)---BMI160 六轴陀螺仪 |
本帖最后由 驴友花雕 于 2021-8-27 14:50 编辑  BMI160 技术数据
BMI160 目标应用
|
|
本帖最后由 驴友花雕 于 2021-9-8 19:55 编辑 项目之二:使用中断的BMI160简单计步功能 实验开源代码 |
|
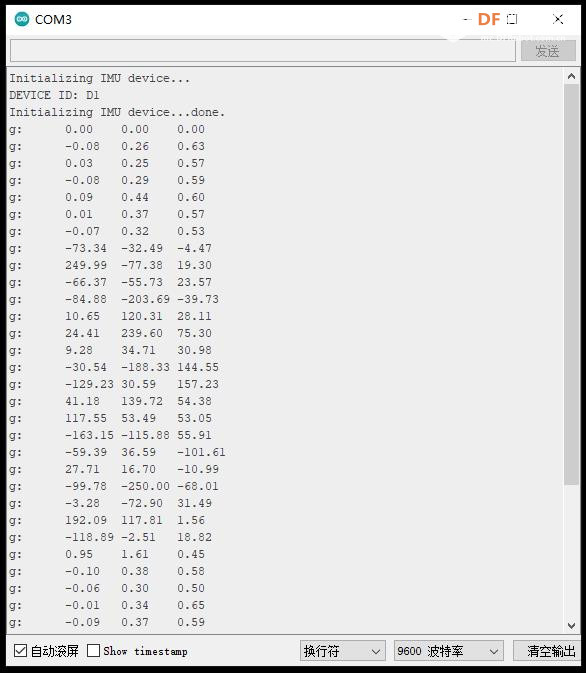
本帖最后由 驴友花雕 于 2021-9-8 19:56 编辑 项目之三:读取陀螺仪数据 实验开源代码 |
|
本帖最后由 驴友花雕 于 2021-9-8 21:02 编辑 项目之四:从硬件 bmi160 读取计步器 I2C地址: 0x68:将 BMI160 的 SDIO 引脚连接到 GND,即默认 I2C 地址 实验接线: BMI160 UNO VIN 5V GND GND SCL A5 SDA A4 SAO GND INT1 D2 实验开源代码 |
|
本帖最后由 驴友花雕 于 2021-9-8 19:55 编辑 项目之五:获取陀螺仪传感器的数据 实验开源代码 |
|
BMI160 传感器 API概述 体积小、功耗低的 BMI160 是一款低噪声 16 位 IMU,专为 AR 或室内导航等移动应用而设计,可提供高度准确的传感器数据和实时传感器数据。BMI160 的低电流消耗使电池驱动设备中的应用成为可能。该传感器具有可配置的片上中断引擎,可提供基于运动的手势识别和上下文感知作为始终开启的后台功能。  主要特征 任意运动检测(加速度计) 显着运动检测(加速度计) 步进检测器(加速度计) 敲击感应(加速度计) 方向识别(加速度计) 平面检测(加速度计) 低重力/自由落体检测(加速度计) 高 G 检测(加速度计) 慢动作警报/无动作中断(加速度计) 数据就绪检测(加速度计、陀螺仪和外部传感器) PMU触发器(陀螺仪) FIFO 中断((加速度计、陀螺仪和外部传感器) 目标应用 增强现实和沉浸式游戏 室内导航 3D 扫描/室内测绘 高级手势识别 沉浸式游戏 9轴运动检测 空中鼠标应用程序和指针 计步器/计步 移动应用的高级系统电源管理 相机模组的光学防抖 自由落体检测和保修记录 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed















 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






