本帖最后由 云天 于 2021-11-8 22:02 编辑
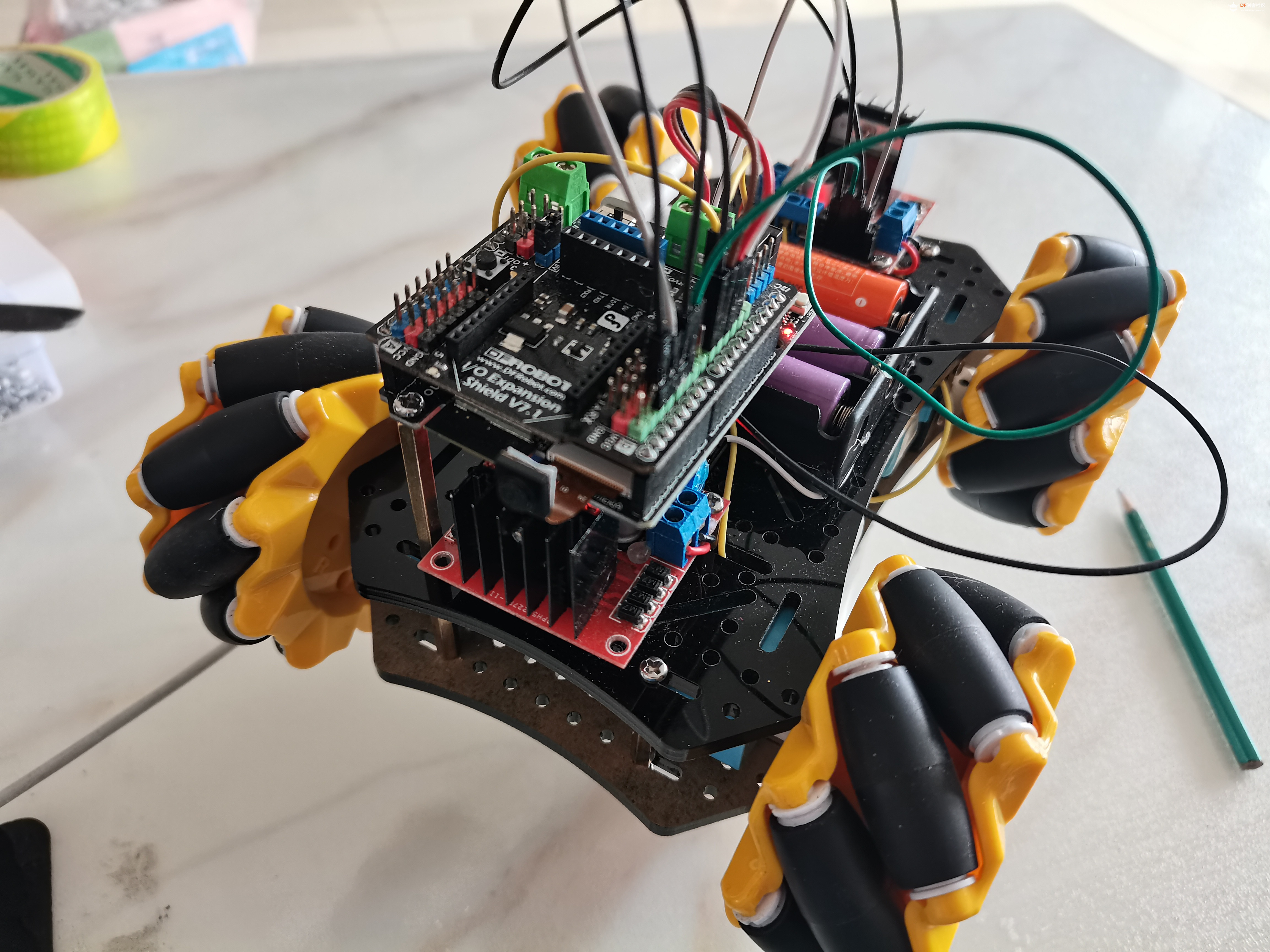
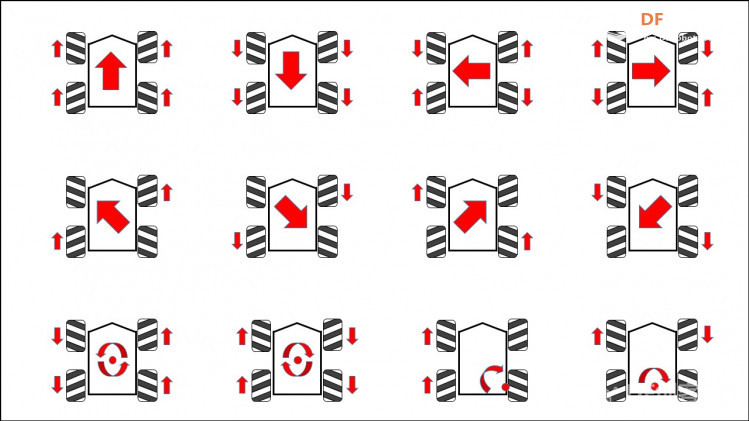
什么是麦克纳姆轮在竞赛 机器人和特殊工种机器人中,全向移动经常是一个必需的功能。「全向移动」意味着可以在平面内做出任意方向平移同时自转的动作。为了实现全向移动,一般机器人会使用「全向轮」(Omni Wheel)或「麦克纳姆轮」(Mecanum Wheel)这两种特殊轮子。 全向轮: 麦克纳姆轮: 麦克纳姆轮与普通轮子的区别在于麦克纳姆轮旋转时,由于存在斜向的从动轮,会同时产生一个斜向的力,当我们控制轮子旋转的速度与方向时,将斜向的力增强或抵消,从而实现小车的全向移动。可以完成横移、斜方向移动等普通小车无法完成的高难度动作,轮子的转动方向与小车的运动方向关系如下图: 【麦克纳姆轮安装】 车拆时再上图
【电机驱动L298N安装】 车拆时再上图
【电机电源及灯带安装】 车拆时再上图
【Maixduino 主控安装】 车拆时再上图
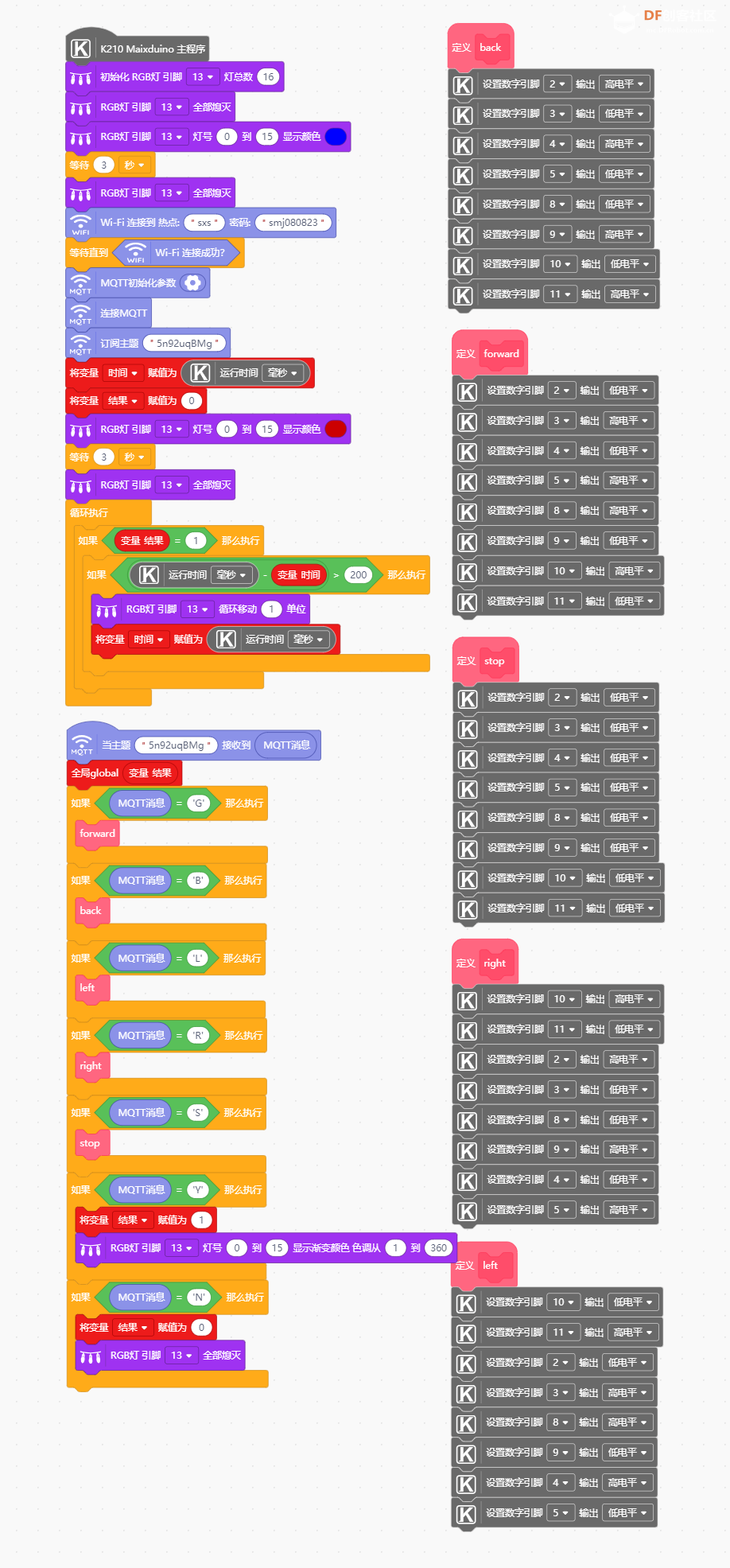
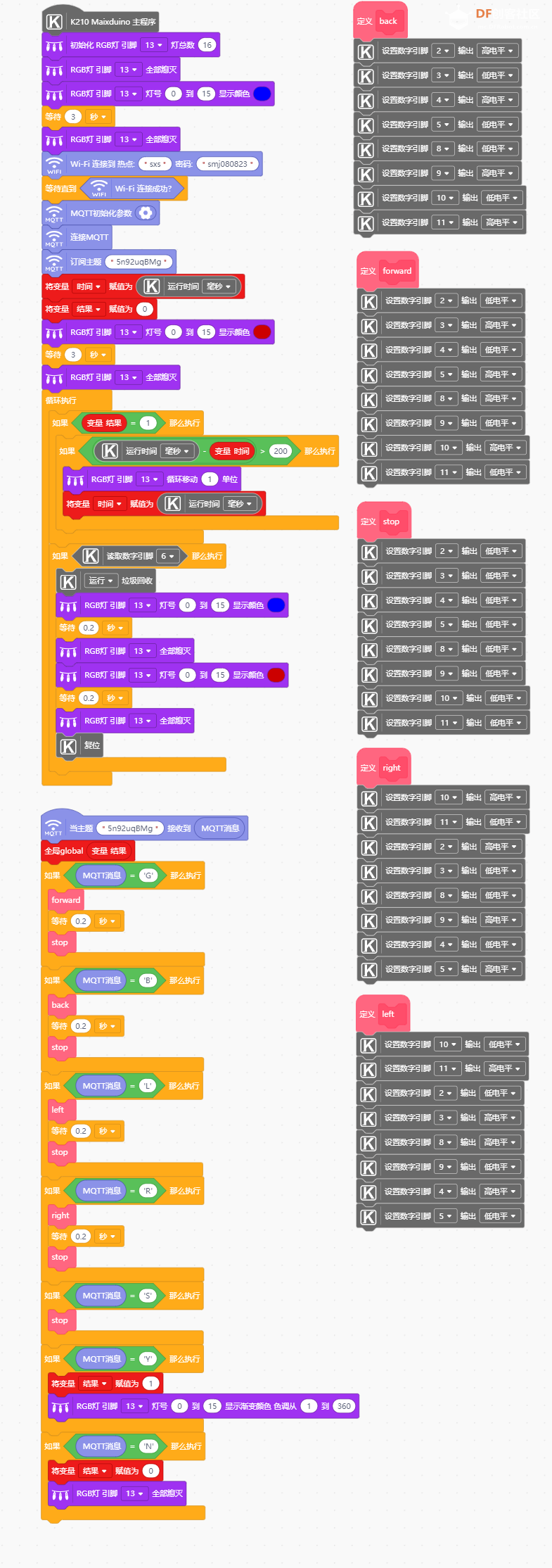
【Mind+编程】 【Micrpython代码】
-
- # MindPlus
- # maixduino
- from network_esp32 import wifi
- from board import board_info
- from umqtt import MQTTClient
- from machine import Timer
- from pin import Pin
- import ubinascii
- import neopixel
- import machine
- import usocket
- import time
- import gc
-
-
- def neopixel_range(rgb, start, end, color):
- trend = -1 if end < start else 1
- for i in range(start, end-1 if trend < 0 else end+1, trend):
- rgb[i] = (color)
- rgb.write()
-
- def hostgetIP(host):
- return usocket.getaddrinfo(host,8080,0,0)[0][4][0]
-
- _mqtt_topic_list = []
-
- def timer11_tick(_):
- global mqtt
- mqtt.check_msg()
-
- def mqtt_callback(topic, msg):
- try:
- topic = topic.decode('utf-8', 'ignore')
- _msg = msg.decode('utf-8', 'ignore')
- eval('mqtt_topic_' + bytes.decode(ubinascii.hexlify(topic)) + '("' + _msg + '")')
- except:
- print((topic, msg))
-
- def neopixel_rotate(rgb, offset):
- steps = rgb.n
- if offset == 0 or steps == 0:
- return
- offset = (abs(offset) % steps)*(-1 if offset < 0 else 1)
- c = []
- if offset > 0:
- for i in range(0, offset):
- c.append(rgb[steps-offset+i])
- for i in range(steps-1, offset-1, -1):
- rgb[i] = rgb[i-offset]
- for i in range(0, offset):
- rgb[i] = c[i]
- else:
- for i in range(0, abs(offset)):
- c.append(rgb[i])
- for i in range(0, steps-abs(offset)):
- rgb[i] = rgb[i+abs(offset)]
- for i in range(steps-abs(offset), steps):
- rgb[i] = c[i-steps+abs(offset)]
- rgb.write()
-
- def neopixel_hsl(h, s, l):
- h = (abs(h) % 360)*(-1 if h < 0 else 1)
- s = max(s, 0); s = min(s, 99); l = max(l, 0); l = min(l, 99)
- c = (((100 - abs(2 * l - 100)) * s) << 8) // 10000
- h1 = h // 60; h2 = (h - h1 * 60) * 256 // 60;
- temp = abs((((h1 % 2) << 8) + h2) - 256);
- x = (c * (256 - (temp))) >> 8; _r = _g = _b = 0
- if h1 == 0:
- _r = c; _g = x; _b = 0
- elif h1 == 1:
- _r = x; _g = c; _b = 0
- elif h1 == 2:
- _r = 0; _g = c; _b = x
- elif h1 == 3:
- _r = 0; _g = x; _b = c
- elif h1 == 4:
- _r = x; _g = 0; _b = c
- elif h1 == 5:
- _r = c; _g = 0; _b = x
- m = ((l * 2 << 8) // 100 - c) // 2
- r = _r + m; g = _g + m; b = _b + m
- return (r, g, b)
-
- def neopixel_rainbow(rgb, start, end, start_hue, end_hue):
- steps = rgb.n
- if steps == 0:
- return
- if end < start:
- num = end; end = start; start = num
- start = max(start, 0); start = min(start, steps)
- end = max(end, 0); end = min(end, steps)
- steps = end - start + 1
- saturation = 100; luminance = 50; h1 = start_hue; h2 = end_hue
- hDistCW = (abs((h2 + 360) - h1) % 360)*(-1 if ((h2 + 360) - h1) < 0 else 1)
- hStepCW = (hDistCW * 100) // steps; hStep = hStepCW
- h1_100 = h1 * 100; s1 = saturation; s2 = saturation; sDist = s2 - s1
- sStep = sDist // steps; s1_100 = s1 * 100; l1 = luminance; l2 = luminance
- lDist = l2 - l1; lStep = lDist // steps; l1_100 = l1 * 100
- if steps == 1:
- rgb[start] = neopixel_hsl(h1 + hStep, s1 + sStep, l1 + lStep)
- else:
- rgb[start] = neopixel_hsl(start_hue, saturation, luminance)
- for i in range(start + 1, start + steps - 1):
- h = (h1_100 + i * hStep) // 100 + 360
- s = (s1_100 + i * sStep) // 100
- l = (l1_100 + i * lStep) // 100
- rgb[i] = neopixel_hsl(h, s, l)
- rgb[start + steps - 1] = neopixel_hsl(end_hue, saturation, luminance)
- rgb.write()
-
- # 自定义函数
- def back():
- Pin.digital_write(board_info.PIN2, 1)
- Pin.digital_write(board_info.PIN3, 0)
- Pin.digital_write(board_info.PIN4, 1)
- Pin.digital_write(board_info.PIN5, 0)
- Pin.digital_write(board_info.PIN8, 0)
- Pin.digital_write(board_info.PIN9, 1)
- Pin.digital_write(board_info.PIN10, 0)
- Pin.digital_write(board_info.PIN11, 1)
- def forward():
- Pin.digital_write(board_info.PIN2, 0)
- Pin.digital_write(board_info.PIN3, 1)
- Pin.digital_write(board_info.PIN4, 0)
- Pin.digital_write(board_info.PIN5, 1)
- Pin.digital_write(board_info.PIN8, 1)
- Pin.digital_write(board_info.PIN9, 0)
- Pin.digital_write(board_info.PIN10, 1)
- Pin.digital_write(board_info.PIN11, 0)
- def stop():
- Pin.digital_write(board_info.PIN2, 0)
- Pin.digital_write(board_info.PIN3, 0)
- Pin.digital_write(board_info.PIN4, 0)
- Pin.digital_write(board_info.PIN5, 0)
- Pin.digital_write(board_info.PIN8, 0)
- Pin.digital_write(board_info.PIN9, 0)
- Pin.digital_write(board_info.PIN10, 0)
- Pin.digital_write(board_info.PIN11, 0)
- def right():
- Pin.digital_write(board_info.PIN10, 1)
- Pin.digital_write(board_info.PIN11, 0)
- Pin.digital_write(board_info.PIN2, 1)
- Pin.digital_write(board_info.PIN3, 0)
- Pin.digital_write(board_info.PIN8, 0)
- Pin.digital_write(board_info.PIN9, 1)
- Pin.digital_write(board_info.PIN4, 0)
- Pin.digital_write(board_info.PIN5, 1)
- def left():
- Pin.digital_write(board_info.PIN10, 0)
- Pin.digital_write(board_info.PIN11, 1)
- Pin.digital_write(board_info.PIN2, 0)
- Pin.digital_write(board_info.PIN3, 1)
- Pin.digital_write(board_info.PIN8, 1)
- Pin.digital_write(board_info.PIN9, 0)
- Pin.digital_write(board_info.PIN4, 1)
- Pin.digital_write(board_info.PIN5, 0)
-
- # 事件回调函数
- def mqtt_topic_356e39327571424d67(_msg):
- global JieGuo
- if (_msg == 'G'):
- forward()
- time.sleep(0.2)
- stop()
- if (_msg == 'B'):
- back()
- time.sleep(0.2)
- stop()
- if (_msg == 'L'):
- left()
- time.sleep(0.2)
- stop()
- if (_msg == 'R'):
- right()
- time.sleep(0.2)
- stop()
- if (_msg == 'S'):
- stop()
- if (_msg == 'Y'):
- JieGuo = 1
- neopixel_rainbow(ws2812_13, 0, 15, 1, 360)
- if (_msg == 'N'):
- JieGuo = 0
- ws2812_13.fill((0, 0, 0))
- ws2812_13.write()
-
-
- ws2812_13 = neopixel.NeoPixel(board_info.PIN13, n=16, bpp=3, timing=1)
- ws2812_13.fill((0, 0, 0))
- ws2812_13.write()
- neopixel_range(ws2812_13, 0, 15, (0, 0, 255))
- time.sleep(3)
- ws2812_13.fill((0, 0, 0))
- ws2812_13.write()
- wifi.connect("sxs", "smj080823")
- while not (wifi.isconnected()):
- pass
- mqtt = MQTTClient("", hostgetIP("iot.dfrobot.com.cn"), 1883, "X8jykxFnR", "u8jskbFngz", keepalive=300)
- try:
- mqtt.connect()
- print('MQTT Connected Successful')
- except:
- print('MQTT Connection Failed')
- mqtt.set_callback(mqtt_callback)
- mqtt.subscribe("5n92uqBMg")
- tim11 =Timer(Timer.TIMER2,Timer.CHANNEL3,mode=Timer.MODE_PERIODIC,period=50,callback=timer11_tick)
- ShiJian = time.ticks_ms()
- JieGuo = 0
- neopixel_range(ws2812_13, 0, 15, (204, 0, 0))
- time.sleep(3)
- ws2812_13.fill((0, 0, 0))
- ws2812_13.write()
- while True:
- if (JieGuo == 1):
- if ((time.ticks_ms() - ShiJian) > 200):
- neopixel_rotate(ws2812_13, 1)
- ShiJian = time.ticks_ms()
- if Pin.digital_read(board_info.PIN6):
- gc.collect()
- neopixel_range(ws2812_13, 0, 15, (0, 0, 255))
- time.sleep(0.2)
- ws2812_13.fill((0, 0, 0))
- ws2812_13.write()
- neopixel_range(ws2812_13, 0, 15, (204, 0, 0))
- time.sleep(0.2)
- ws2812_13.fill((0, 0, 0))
- ws2812_13.write()
- machine.reset()
-
其中修改“mqtt = MQTTClient("", hostgetIP("iot.dfrobot.com.cn"), 1883, "X8jykxFnR", "u8jskbFngz", keepalive=300)”中的“keepalive”值改为“300”。(MQTT在建立连接的时候,我们可以传递一个 Keep Alive 参数,它的单位为秒,MQTT 协议中约定:在 1.5*Keep Alive 的时间间隔内,如果 Broker 没有收到来自 Client 的任何数据包,那么 Broker 认为它和 Client 之间的连接已经断开;同样地, 如果 Client 没有收到来自 Broker 的任何数据包,那么 Client 认为它和 Broker 之间的连接已经断开。)
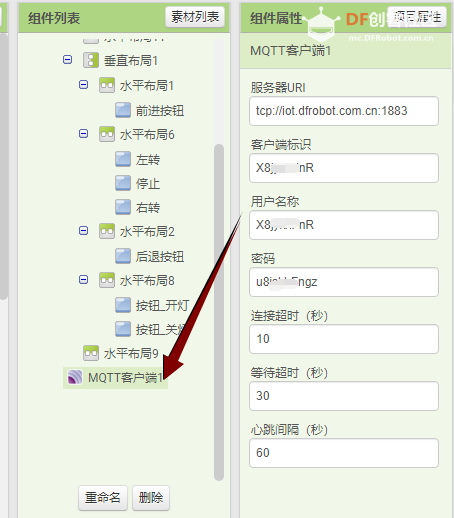
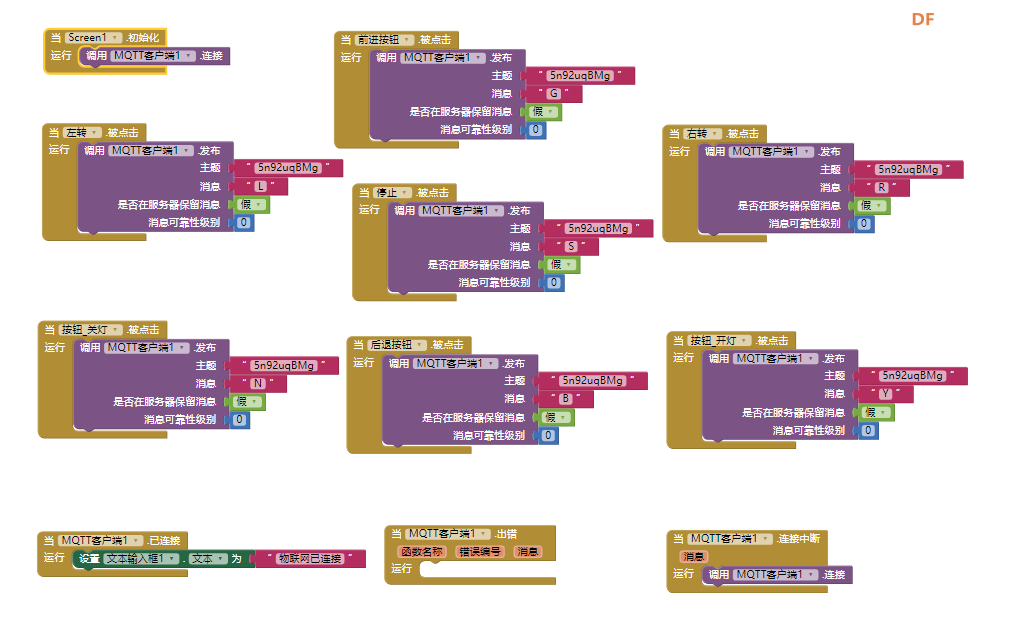
【App Inventor编程】


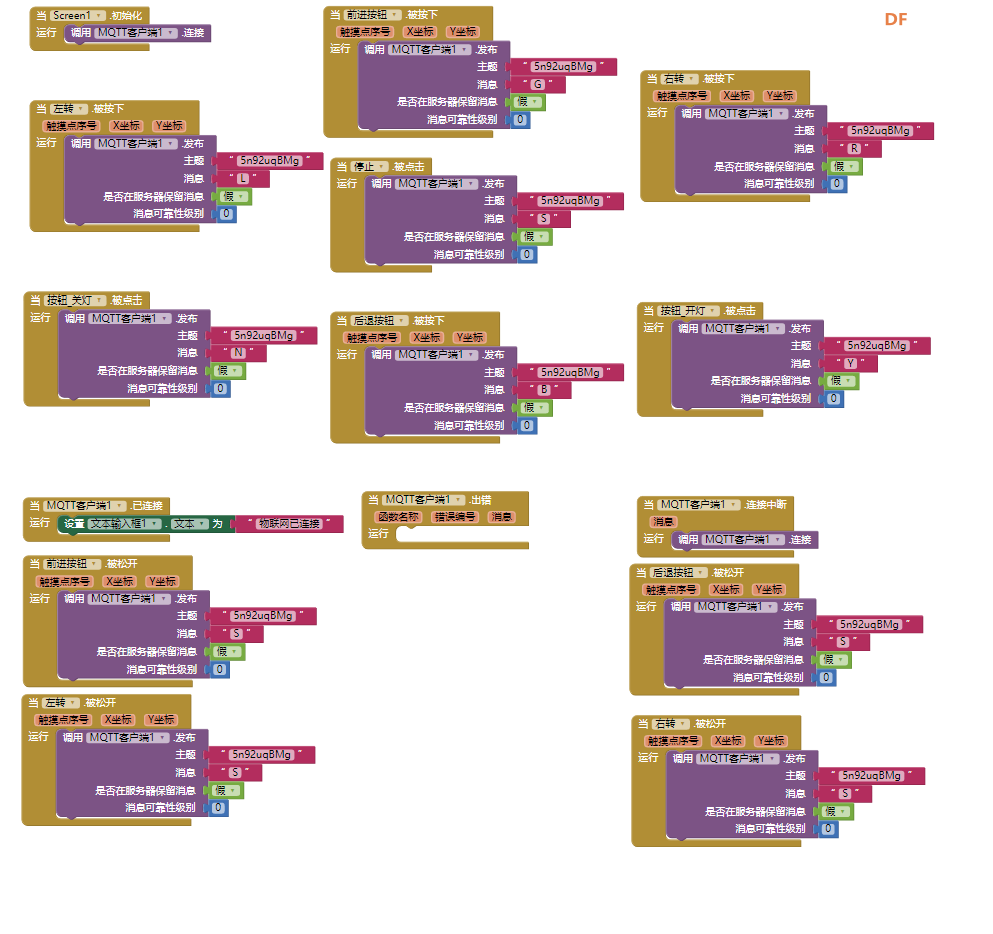
【程序进一步优化】为实现小车连续运动,将APP中的按钮命令“点击”发送修改为“按下”发送,再增加“松开”命令发送“停止指令”。Maixduino程序中将接收命令后的"stop"指令去掉。
-
-
- # MindPlus
- # maixduino
- from network_esp32 import wifi
- from board import board_info
- from umqtt import MQTTClient
- from machine import Timer
- from pin import Pin
- import ubinascii
- import neopixel
- import usocket
- import time
-
-
- def neopixel_range(rgb, start, end, color):
- trend = -1 if end < start else 1
- for i in range(start, end-1 if trend < 0 else end+1, trend):
- rgb[i] = (color)
- rgb.write()
-
- def hostgetIP(host):
- return usocket.getaddrinfo(host,8080,0,0)[0][4][0]
-
- _mqtt_topic_list = []
-
- def timer11_tick(_):
- global mqtt
- mqtt.check_msg()
-
- def mqtt_callback(topic, msg):
- try:
- topic = topic.decode('utf-8', 'ignore')
- _msg = msg.decode('utf-8', 'ignore')
- eval('mqtt_topic_' + bytes.decode(ubinascii.hexlify(topic)) + '("' + _msg + '")')
- except:
- print((topic, msg))
-
- def neopixel_rotate(rgb, offset):
- steps = rgb.n
- if offset == 0 or steps == 0:
- return
- offset = (abs(offset) % steps)*(-1 if offset < 0 else 1)
- c = []
- if offset > 0:
- for i in range(0, offset):
- c.append(rgb[steps-offset+i])
- for i in range(steps-1, offset-1, -1):
- rgb[i] = rgb[i-offset]
- for i in range(0, offset):
- rgb[i] = c[i]
- else:
- for i in range(0, abs(offset)):
- c.append(rgb[i])
- for i in range(0, steps-abs(offset)):
- rgb[i] = rgb[i+abs(offset)]
- for i in range(steps-abs(offset), steps):
- rgb[i] = c[i-steps+abs(offset)]
- rgb.write()
-
- def neopixel_hsl(h, s, l):
- h = (abs(h) % 360)*(-1 if h < 0 else 1)
- s = max(s, 0); s = min(s, 99); l = max(l, 0); l = min(l, 99)
- c = (((100 - abs(2 * l - 100)) * s) << 8) // 10000
- h1 = h // 60; h2 = (h - h1 * 60) * 256 // 60;
- temp = abs((((h1 % 2) << 8) + h2) - 256);
- x = (c * (256 - (temp))) >> 8; _r = _g = _b = 0
- if h1 == 0:
- _r = c; _g = x; _b = 0
- elif h1 == 1:
- _r = x; _g = c; _b = 0
- elif h1 == 2:
- _r = 0; _g = c; _b = x
- elif h1 == 3:
- _r = 0; _g = x; _b = c
- elif h1 == 4:
- _r = x; _g = 0; _b = c
- elif h1 == 5:
- _r = c; _g = 0; _b = x
- m = ((l * 2 << 8) // 100 - c) // 2
- r = _r + m; g = _g + m; b = _b + m
- return (r, g, b)
-
- def neopixel_rainbow(rgb, start, end, start_hue, end_hue):
- steps = rgb.n
- if steps == 0:
- return
- if end < start:
- num = end; end = start; start = num
- start = max(start, 0); start = min(start, steps)
- end = max(end, 0); end = min(end, steps)
- steps = end - start + 1
- saturation = 100; luminance = 50; h1 = start_hue; h2 = end_hue
- hDistCW = (abs((h2 + 360) - h1) % 360)*(-1 if ((h2 + 360) - h1) < 0 else 1)
- hStepCW = (hDistCW * 100) // steps; hStep = hStepCW
- h1_100 = h1 * 100; s1 = saturation; s2 = saturation; sDist = s2 - s1
- sStep = sDist // steps; s1_100 = s1 * 100; l1 = luminance; l2 = luminance
- lDist = l2 - l1; lStep = lDist // steps; l1_100 = l1 * 100
- if steps == 1:
- rgb[start] = neopixel_hsl(h1 + hStep, s1 + sStep, l1 + lStep)
- else:
- rgb[start] = neopixel_hsl(start_hue, saturation, luminance)
- for i in range(start + 1, start + steps - 1):
- h = (h1_100 + i * hStep) // 100 + 360
- s = (s1_100 + i * sStep) // 100
- l = (l1_100 + i * lStep) // 100
- rgb[i] = neopixel_hsl(h, s, l)
- rgb[start + steps - 1] = neopixel_hsl(end_hue, saturation, luminance)
- rgb.write()
-
- # 自定义函数
- def back():
- Pin.digital_write(board_info.PIN2, 1)
- Pin.digital_write(board_info.PIN3, 0)
- Pin.digital_write(board_info.PIN4, 1)
- Pin.digital_write(board_info.PIN5, 0)
- Pin.digital_write(board_info.PIN8, 0)
- Pin.digital_write(board_info.PIN9, 1)
- Pin.digital_write(board_info.PIN10, 0)
- Pin.digital_write(board_info.PIN11, 1)
- def forward():
- Pin.digital_write(board_info.PIN2, 0)
- Pin.digital_write(board_info.PIN3, 1)
- Pin.digital_write(board_info.PIN4, 0)
- Pin.digital_write(board_info.PIN5, 1)
- Pin.digital_write(board_info.PIN8, 1)
- Pin.digital_write(board_info.PIN9, 0)
- Pin.digital_write(board_info.PIN10, 1)
- Pin.digital_write(board_info.PIN11, 0)
- def stop():
- Pin.digital_write(board_info.PIN2, 0)
- Pin.digital_write(board_info.PIN3, 0)
- Pin.digital_write(board_info.PIN4, 0)
- Pin.digital_write(board_info.PIN5, 0)
- Pin.digital_write(board_info.PIN8, 0)
- Pin.digital_write(board_info.PIN9, 0)
- Pin.digital_write(board_info.PIN10, 0)
- Pin.digital_write(board_info.PIN11, 0)
- def right():
- Pin.digital_write(board_info.PIN10, 1)
- Pin.digital_write(board_info.PIN11, 0)
- Pin.digital_write(board_info.PIN2, 1)
- Pin.digital_write(board_info.PIN3, 0)
- Pin.digital_write(board_info.PIN8, 0)
- Pin.digital_write(board_info.PIN9, 1)
- Pin.digital_write(board_info.PIN4, 0)
- Pin.digital_write(board_info.PIN5, 1)
- def left():
- Pin.digital_write(board_info.PIN10, 0)
- Pin.digital_write(board_info.PIN11, 1)
- Pin.digital_write(board_info.PIN2, 0)
- Pin.digital_write(board_info.PIN3, 1)
- Pin.digital_write(board_info.PIN8, 1)
- Pin.digital_write(board_info.PIN9, 0)
- Pin.digital_write(board_info.PIN4, 1)
- Pin.digital_write(board_info.PIN5, 0)
-
- # 事件回调函数
- def mqtt_topic_356e39327571424d67(_msg):
- global JieGuo
- if (_msg == 'G'):
- forward()
- if (_msg == 'B'):
- back()
- if (_msg == 'L'):
- left()
- if (_msg == 'R'):
- right()
- if (_msg == 'S'):
- stop()
- if (_msg == 'Y'):
- JieGuo = 1
- neopixel_rainbow(ws2812_13, 0, 15, 1, 360)
- if (_msg == 'N'):
- JieGuo = 0
- ws2812_13.fill((0, 0, 0))
- ws2812_13.write()
-
-
- ws2812_13 = neopixel.NeoPixel(board_info.PIN13, n=16, bpp=3, timing=1)
- ws2812_13.fill((0, 0, 0))
- ws2812_13.write()
- neopixel_range(ws2812_13, 0, 15, (0, 0, 255))
- time.sleep(3)
- ws2812_13.fill((0, 0, 0))
- ws2812_13.write()
- wifi.connect("sxs", "smj080823")
- while not (wifi.isconnected()):
- pass
- mqtt = MQTTClient("", hostgetIP("iot.dfrobot.com.cn"), 1883, "X8jykxFnR", "u8jskbFngz", keepalive=30)
- try:
- mqtt.connect()
- print('MQTT Connected Successful')
- except:
- print('MQTT Connection Failed')
- mqtt.set_callback(mqtt_callback)
- mqtt.subscribe("5n92uqBMg")
- tim11 =Timer(Timer.TIMER2,Timer.CHANNEL3,mode=Timer.MODE_PERIODIC,period=50,callback=timer11_tick)
- ShiJian = time.ticks_ms()
- JieGuo = 0
- neopixel_range(ws2812_13, 0, 15, (204, 0, 0))
- time.sleep(3)
- ws2812_13.fill((0, 0, 0))
- ws2812_13.write()
- while True:
- if (JieGuo == 1):
- if ((time.ticks_ms() - ShiJian) > 200):
- neopixel_rotate(ws2812_13, 1)
- ShiJian = time.ticks_ms()
-
演示:麦克纳姆大战小黑
【语音控制】
1、使用软件“MaixPy IDE”,首先将asr.py上传到Maixduino板子上。选择“工具”菜单,“发送文件到开发板”。
文中用到的ASR.py是由df团队编写(感谢李工提供),具体代码如下:
-
- import time
- import json
- from Maix import GPIO, I2S
- from fpioa_manager import fm
- from speech_recognizer import isolated_word
-
- class ASR:
- def __init__(self):
- self.asr = None
- self.i2s = None
- self.model = None
-
- def __start(self, size):
- if self.asr:
- del self.asr
- if self.i2s:
- del self.i2s
- try:
- fm.register(20,fm.fpioa.I2S0_IN_D0, force=True)
- fm.register(18,fm.fpioa.I2S0_SCLK, force=True)
- fm.register(19,fm.fpioa.I2S0_WS, force=True)
- self.i2s = I2S(I2S.DEVICE_0)
- self.i2s.channel_config(self.i2s.CHANNEL_0, self.i2s.RECEIVER, align_mode=I2S.STANDARD_MODE)
- self.i2s.set_sample_rate(16000)
- self.asr = isolated_word(dmac=2, i2s=I2S.DEVICE_0, size=size)
- self.asr.set_threshold(0, 0, 15000)
- return True
- except:
- return False
-
- def newModel(self):
- return []
-
- def training(self, corpus, model):
- if not corpus or not self.__start(1) or not self.asr:
- return
- rc=1
- co=0
- while True:
- time.sleep_ms(100)
- if self.asr.Done == self.asr.record(0):
- model.append({'name': corpus, 'data': self.asr.get(0)})
- print("complete")
- break
- if self.asr.Speak == self.asr.state():
- if rc != -1:
- print()
- print("speak: " + str(corpus))
- rc = -1
- else:
- if co%2==0:
- print("\rready" + "."*rc + " "*(3-rc), end='')
- rc += 1
- if rc > 3:
- rc = 1
- co += 1
-
- def run(self, model):
- if not model or len(model)<1 or not self.__start(len(model)) or not self.asr:
- return None
- for i in range(len(model)):
- self.asr.set(i, model[i]['data'])
- self.model = model
-
- def recognize(self):
- if not self.model or len(self.model)<1 or not self.asr:
- return None
- for i in range(20):
- if self.asr.Done == self.asr.recognize():
- result = self.asr.result()
- if result:
- return self.model[result[0]]['name']
- return None
-
- def save(self, model, path):
- if not model or not path:
- return False
- try:
- for i in range(len(model)):
- model[i]['data'] = list(model[i]['data'])
- model[i]['data'][1] = list(model[i]['data'][1])
- with open(path, "wb") as f:
- json.dump(model,f)
- f.close()
- return True
- except:
- return False
-
- def load(self, path):
- if not path:
- return []
- try:
- with open(path, "rb") as f:
- model = json.load(f)
- for i in range(len(model)):
- model[i]['data'][1] = bytes(model[i]['data'][1])
- model[i]['data'] = tuple(model[i]['data'])
- f.close()
- return model
- except:
- return []
-
- asr = ASR()
-
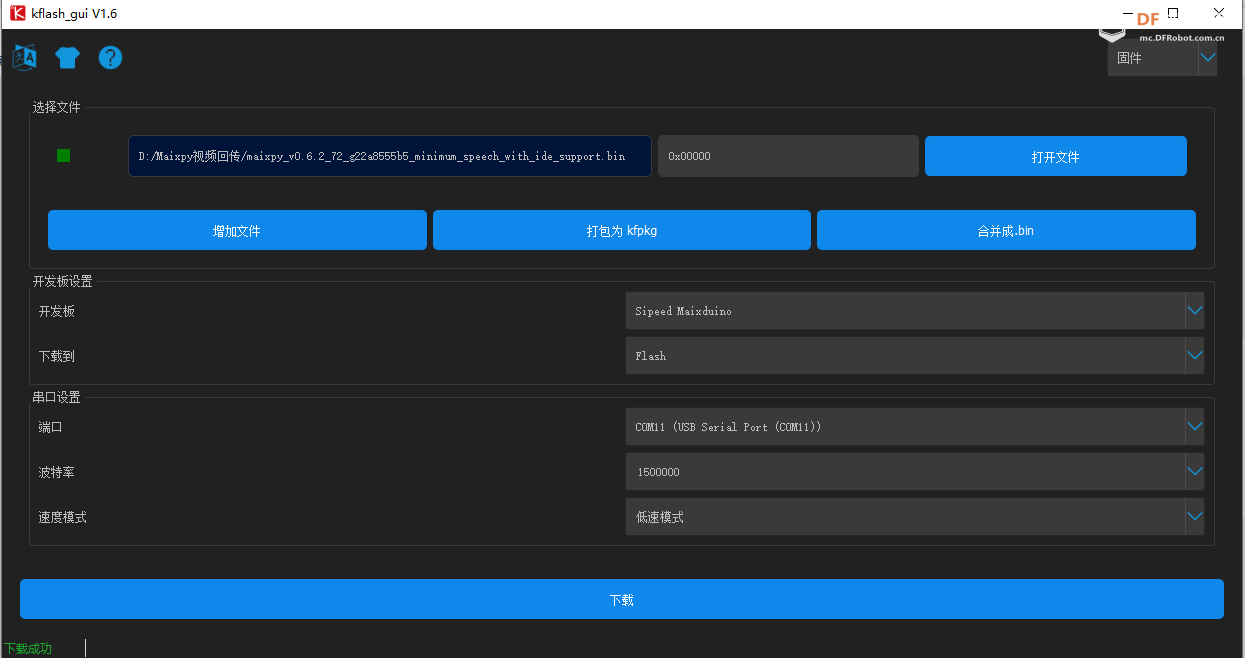
2、固件要使用“maixpy_v0.6.2_72_g22a8555b5_minimum_speech_with_ide_support ”
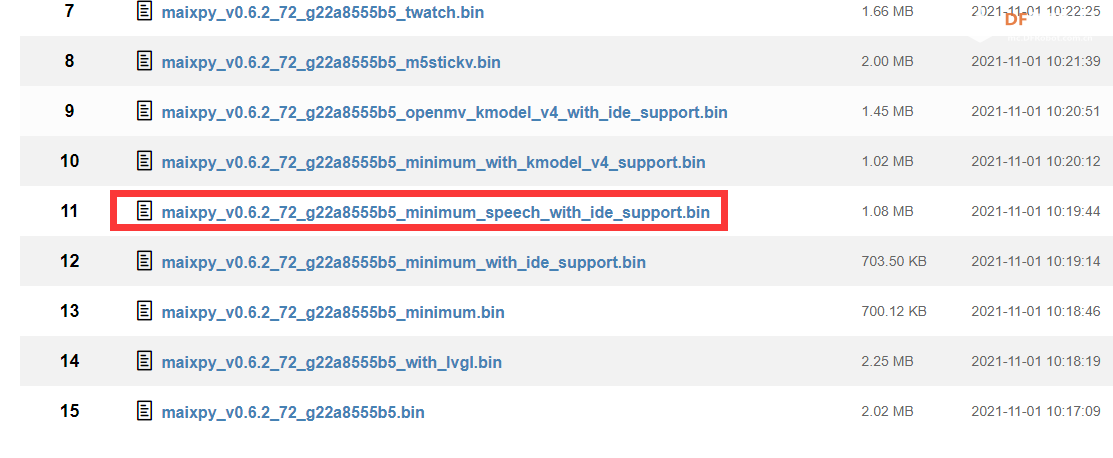
https://cn.dl.sipeed.com/shareURL/MAIX/MaixPy/release/master/maixpy_v0.6.2_72_g22a8555b5
3、训练代码
-
- # MindPlus
- # maixduino
- from board import board_info
-
- from ASR import asr
- import time
- from Maix import GPIO
-
- from fpioa_manager import fm
- fm.register(board_info.PIN12,fm.fpioa.GPIO0)
- led_r=GPIO(GPIO.GPIO0,GPIO.OUT)
- led_r.value(0)
- time.sleep(1)
- led_r.value(1)
- model = asr.newModel()
- corpus = ['打开','关闭','退出']
- print('开始训练')
- for order in corpus:
- asr.training(order, model)
- print('训练完成')
- asr.save(model, "/flash/asr.json")
- asr.run(asr.load("/flash/asr.json"))
- while True:
- result = asr.recognize()
- if bool(result):
- print(result)
- if (result == '打开'):
- led_r.value(1)
- if (result == '关闭'):
- led_r.value(0)
- if (result == '退出'):
- break
- fm.unregister(board_info.PIN12)
-
LED灯接在扩展板的12引脚上。
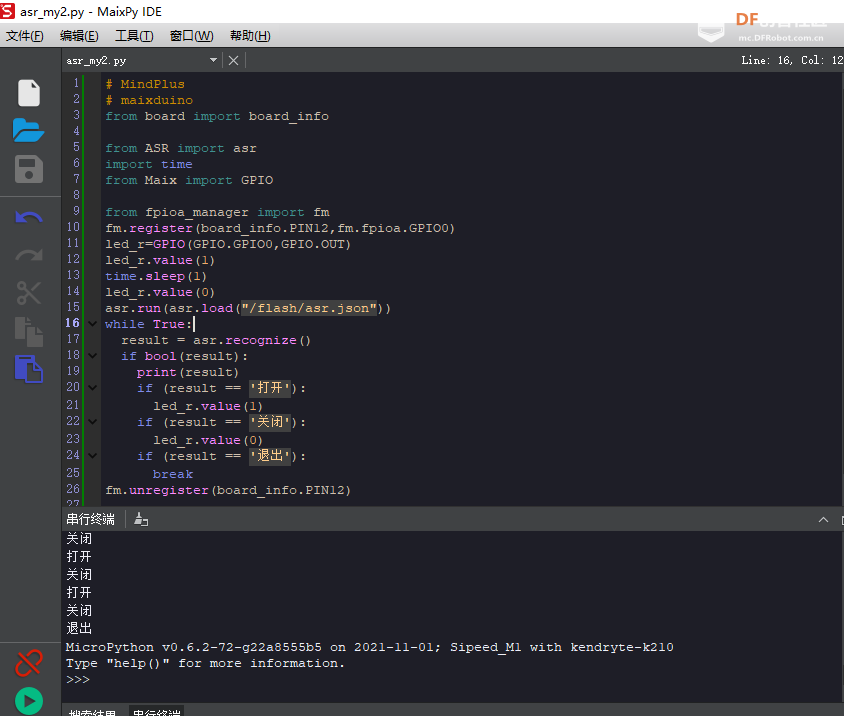
4、测试代码
-
- # MindPlus
- # maixduino
- from board import board_info
-
- from ASR import asr
- import time
- from Maix import GPIO
-
- from fpioa_manager import fm
- fm.register(board_info.PIN12,fm.fpioa.GPIO0)
- led_r=GPIO(GPIO.GPIO0,GPIO.OUT)
- led_r.value(1)
- time.sleep(1)
- led_r.value(0)
- asr.run(asr.load("/flash/asr.json"))
- while True:
- result = asr.recognize()
- if bool(result):
- print(result)
- if (result == '打开'):
- led_r.value(1)
- if (result == '关闭'):
- led_r.value(0)
- if (result == '退出'):
- break
- fm.unregister(board_info.PIN12)
-
测试
【语音控车】1.训练程序
-
- from board import board_info
-
- from ASR import asr
- import time
- from Maix import GPIO
-
- from fpioa_manager import fm
- fm.register(board_info.PIN12,fm.fpioa.GPIO0)
- led_r=GPIO(GPIO.GPIO0,GPIO.OUT)
- led_r.value(0)
- time.sleep(1)
- led_r.value(1)
- model = asr.newModel()
- #corpus = ['打开','关闭','退出','前进','后退','向左','向右','停止']
- print('开始训练')
- for order in corpus:
- asr.training(order, model)
- print('训练完成')
- asr.save(model, "/flash/asr.json")
-
2、语音控车代码
-
- # MindPlus
- # maixduino
-
- from board import board_info
-
- from ASR import asr
- import time
- from Maix import GPIO
-
- from fpioa_manager import fm
- fm.register(board_info.PIN2,fm.fpioa.GPIO0)
- PIN2=GPIO(GPIO.GPIO0,GPIO.OUT)
- fm.register(board_info.PIN3,fm.fpioa.GPIO1)
- PIN3=GPIO(GPIO.GPIO1,GPIO.OUT)
- fm.register(board_info.PIN4,fm.fpioa.GPIO2)
- PIN4=GPIO(GPIO.GPIO2,GPIO.OUT)
- fm.register(board_info.PIN5,fm.fpioa.GPIO3)
- PIN5=GPIO(GPIO.GPIO3,GPIO.OUT)
- fm.register(board_info.PIN8,fm.fpioa.GPIO4)
- PIN8=GPIO(GPIO.GPIO4,GPIO.OUT)
- fm.register(board_info.PIN9,fm.fpioa.GPIO5)
- PIN9=GPIO(GPIO.GPIO5,GPIO.OUT)
- fm.register(board_info.PIN10,fm.fpioa.GPIO6)
- PIN10=GPIO(GPIO.GPIO6,GPIO.OUT)
- fm.register(board_info.PIN11,fm.fpioa.GPIO7)
- PIN11=GPIO(GPIO.GPIO7,GPIO.OUT)
- fm.register(board_info.PIN12,fm.fpioa.GPIOHS0)
- led_r=GPIO(GPIO.GPIOHS0,GPIO.OUT)
-
- # 自定义函数
- def back():
- Pin.digital_write(PIN2, 1)
- Pin.digital_write(PIN3, 0)
- Pin.digital_write(PIN4, 1)
- Pin.digital_write(PIN5, 0)
- Pin.digital_write(PIN8, 0)
- Pin.digital_write(PIN9, 1)
- Pin.digital_write(PIN10, 0)
- Pin.digital_write(PIN11, 1)
- def forward():
- Pin.digital_write(PIN2, 0)
- Pin.digital_write(PIN3, 1)
- Pin.digital_write(PIN4, 0)
- Pin.digital_write(PIN5, 1)
- Pin.digital_write(PIN8, 1)
- Pin.digital_write(PIN9, 0)
- Pin.digital_write(PIN10, 1)
- Pin.digital_write(PIN11, 0)
- def stop():
- Pin.digital_write(PIN2, 0)
- Pin.digital_write(PIN3, 0)
- Pin.digital_write(PIN4, 0)
- Pin.digital_write(PIN5, 0)
- Pin.digital_write(PIN8, 0)
- Pin.digital_write(PIN9, 0)
- Pin.digital_write(PIN10, 0)
- Pin.digital_write(PIN11, 0)
- def right():
- Pin.digital_write(PIN10, 1)
- Pin.digital_write(PIN11, 0)
- Pin.digital_write(PIN2, 1)
- Pin.digital_write(PIN3, 0)
- Pin.digital_write(PIN8, 0)
- Pin.digital_write(PIN9, 1)
- Pin.digital_write(PIN4, 0)
- Pin.digital_write(PIN5, 1)
- def left():
- Pin.digital_write(PIN10, 0)
- Pin.digital_write(PIN11, 1)
- Pin.digital_write(PIN2, 0)
- Pin.digital_write(PIN3, 1)
- Pin.digital_write(PIN8, 1)
- Pin.digital_write(PIN9, 0)
- Pin.digital_write(PIN4, 1)
- Pin.digital_write(PIN5, 0)
-
- led_r.value(1)
- time.sleep(1)
- led_r.value(0)
- asr.run(asr.load("/flash/asr.json"))
- while True:
- result = asr.recognize()
- if bool(result):
- print(result)
- if (result == '前进'):
- forword()
- time.sleep(0.2)
- stop()
- if (result == '后退'):
- back()
- time.sleep(0.2)
- stop()
- if (result == '向左'):
- left()
- time.sleep(0.2)
- stop()
- if (result == '向右'):
- right()
- time.sleep(0.2)
- stop()
- if (result == '打开'):
- led_r.value(1)
- if (result == '关闭'):
- led_r.value(0)
- if (result == '退出'):
- break
- fm.unregister(board_info.PIN12)
- fm.unregister(board_info.PIN2)
- fm.unregister(board_info.PIN3)
- fm.unregister(board_info.PIN4)
- fm.unregister(board_info.PIN5)
- fm.unregister(board_info.PIN8)
- fm.unregister(board_info.PIN9)
- fm.unregister(board_info.PIN10)
- fm.unregister(board_info.PIN11)
-
测试
演示
|






 沪公网安备31011502402448
沪公网安备31011502402448
 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创客造
创客造
 编辑选择奖
编辑选择奖
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






