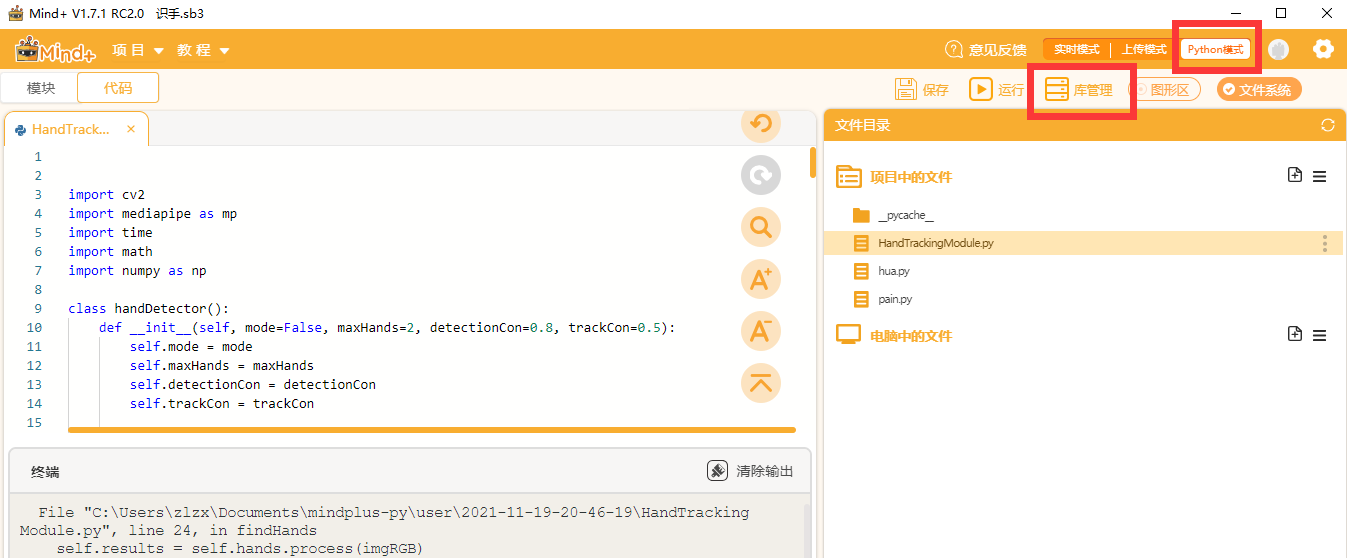
本帖最后由 云天 于 2021-11-20 08:35 编辑 【MediaPipe】 【Mind+安装】
1、安装mediapipe
2、安装pinpong
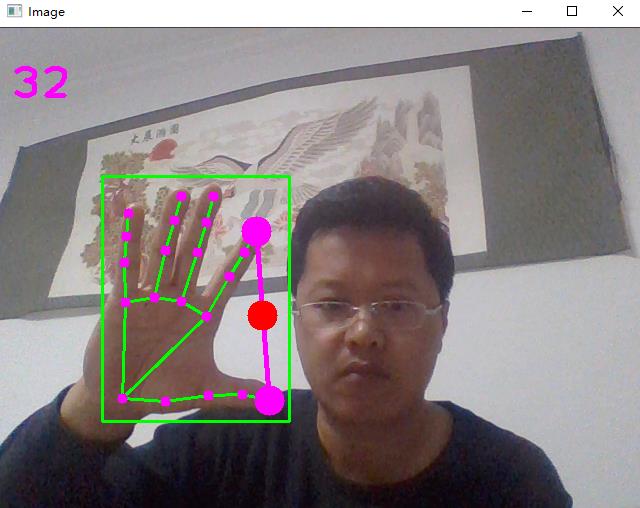
【手势标识追踪】
import cv2
import mediapipe as mp
import time
import math
import numpy as np
class handDetector():
def __init__(self, mode=False, maxHands=2, detectionCon=0.8, trackCon=0.5):
self.mode = mode
self.maxHands = maxHands
self.detectionCon = detectionCon
self.trackCon = trackCon
self.mpHands = mp.solutions.hands
self.hands = self.mpHands.Hands(self.mode, self.maxHands,
self.detectionCon, self.trackCon)
self.mpDraw = mp.solutions.drawing_utils
self.tipIds = [4, 8, 12, 16, 20]
def findHands(self, img, draw=True):
imgRGB = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
self.results = self.hands.process(imgRGB)
# print(results.multi_hand_landmarks)
if self.results.multi_hand_landmarks:
for handLms in self.results.multi_hand_landmarks:
if draw:
self.mpDraw.draw_landmarks(img, handLms,
self.mpHands.HAND_CONNECTIONS)
return img
def findPosition(self, img, handNo=0, draw=True):
xList = []
yList = []
bbox = []
self.lmList = []
if self.results.multi_hand_landmarks:
myHand = self.results.multi_hand_landmarks[handNo]
for id, lm in enumerate(myHand.landmark):
# print(id, lm)
h, w, c = img.shape
cx, cy = int(lm.x * w), int(lm.y * h)
xList.append(cx)
yList.append(cy)
# print(id, cx, cy)
self.lmList.append([id, cx, cy])
if draw:
cv2.circle(img, (cx, cy), 5, (255, 0, 255), cv2.FILLED)
xmin, xmax = min(xList), max(xList)
ymin, ymax = min(yList), max(yList)
bbox = xmin, ymin, xmax, ymax
if draw:
cv2.rectangle(img, (xmin - 20, ymin - 20), (xmax + 20, ymax + 20),
(0, 255, 0), 2)
return self.lmList, bbox
def fingersUp(self):
fingers = []
# Thumb
if self.lmList[self.tipIds[0]][1] > self.lmList[self.tipIds[0] - 1][1]:
fingers.append(1)
else:
fingers.append(0)
# Fingers
for id in range(1, 5):
if self.lmList[self.tipIds[id]][2] < self.lmList[self.tipIds[id] - 2][2]:
fingers.append(1)
else:
fingers.append(0)
# totalFingers = fingers.count(1)
return fingers
def findDistance(self, p1, p2, img, draw=True,r=15, t=3):
x1, y1 = self.lmList[p1][1:]
x2, y2 = self.lmList[p2][1:]
cx, cy = (x1 + x2) // 2, (y1 + y2) // 2
if draw:
cv2.line(img, (x1, y1), (x2, y2), (255, 0, 255), t)
cv2.circle(img, (x1, y1), r, (255, 0, 255), cv2.FILLED)
cv2.circle(img, (x2, y2), r, (255, 0, 255), cv2.FILLED)
cv2.circle(img, (cx, cy), r, (0, 0, 255), cv2.FILLED)
length = math.hypot(x2 - x1, y2 - y1)
return length, img, [x1, y1, x2, y2, cx, cy]
def main():
pTime = 0
cTime = 0
cap = cv2.VideoCapture(0)
detector = handDetector()
while True:
success, img = cap.read()
img = detector.findHands(img)
lmList, bbox = detector.findPosition(img)
if len(lmList) != 0:
#print(lmList[4])
fingers = detector.findDistance(8,4,img)
print(fingers[0])
cTime = time.time()
fps = 1 / (cTime - pTime)
pTime = cTime
cv2.putText(img, str(int(fps)), (10, 70), cv2.FONT_HERSHEY_PLAIN, 3,(255, 0, 255), 3)
cv2.imshow("Image", img)
cv2.waitKey(1)
if __name__ == "__main__":
main()
复制代码 【两指距离】 两指距离获取后,使用平均值进行滤波。
并采用距离比值(拇指与食指的距离与掌根与小拇指根的距离),来表示拇指与食指的张开程度。目的是为了解决,在图像“近大远小”的问题。
dis1 = detector.findDistance(8,4,img)
dis2 = detector.findDistance(0,17,img)
dis= dis1[0]/dis2[0]
import cv2
import mediapipe as mp
import time
import math
import numpy as np
class handDetector():
def __init__(self, mode=False, maxHands=2, detectionCon=0.8, trackCon=0.5):
self.mode = mode
self.maxHands = maxHands
self.detectionCon = detectionCon
self.trackCon = trackCon
self.mpHands = mp.solutions.hands
self.hands = self.mpHands.Hands(self.mode, self.maxHands,
self.detectionCon, self.trackCon)
self.mpDraw = mp.solutions.drawing_utils
self.tipIds = [4, 8, 12, 16, 20]
def findHands(self, img, draw=True):
imgRGB = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
self.results = self.hands.process(imgRGB)
# print(results.multi_hand_landmarks)
if self.results.multi_hand_landmarks:
for handLms in self.results.multi_hand_landmarks:
if draw:
self.mpDraw.draw_landmarks(img, handLms,
self.mpHands.HAND_CONNECTIONS)
return img
def findPosition(self, img, handNo=0, draw=True):
xList = []
yList = []
bbox = []
self.lmList = []
if self.results.multi_hand_landmarks:
myHand = self.results.multi_hand_landmarks[handNo]
for id, lm in enumerate(myHand.landmark):
# print(id, lm)
h, w, c = img.shape
cx, cy = int(lm.x * w), int(lm.y * h)
xList.append(cx)
yList.append(cy)
# print(id, cx, cy)
self.lmList.append([id, cx, cy])
if draw:
cv2.circle(img, (cx, cy), 5, (255, 0, 255), cv2.FILLED)
xmin, xmax = min(xList), max(xList)
ymin, ymax = min(yList), max(yList)
bbox = xmin, ymin, xmax, ymax
if draw:
cv2.rectangle(img, (xmin - 20, ymin - 20), (xmax + 20, ymax + 20),(0, 255, 0), 2)
return self.lmList, bbox
def fingersUp(self):
fingers = []
# Thumb
if self.lmList[self.tipIds[0]][1] > self.lmList[self.tipIds[0] - 1][1]:
fingers.append(1)
else:
fingers.append(0)
# Fingers
for id in range(1, 5):
if self.lmList[self.tipIds[id]][2] < self.lmList[self.tipIds[id] - 2][2]:
fingers.append(1)
else:
fingers.append(0)
# totalFingers = fingers.count(1)
return fingers
def findDistance(self, p1, p2, img, draw=True,r=15, t=3):
x1, y1 = self.lmList[p1][1:]
x2, y2 = self.lmList[p2][1:]
cx, cy = (x1 + x2) // 2, (y1 + y2) // 2
if draw:
cv2.line(img, (x1, y1), (x2, y2), (255, 0, 255), t)
cv2.circle(img, (x1, y1), r, (255, 0, 255), cv2.FILLED)
cv2.circle(img, (x2, y2), r, (255, 0, 255), cv2.FILLED)
#cv2.circle(img, (cx, cy), r, (0, 0, 255), cv2.FILLED)
length = math.hypot(x2 - x1, y2 - y1)
return length, img, [x1, y1, x2, y2, cx, cy]
def main():
global dis,i
i=0
dis=[0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0]
pTime = 0
cTime = 0
cap = cv2.VideoCapture(0)
detector = handDetector()
while True:
success, img = cap.read()
img = detector.findHands(img)
lmList, bbox = detector.findPosition(img)
if len(lmList) != 0:
#print(lmList[4])
dis1 = detector.findDistance(8,4,img)
dis2 = detector.findDistance(0,17,img)
dis[i]= dis1[0]/dis2[0]
i=i+1
if i>19:
i=0
print(np.mean(dis))
cTime = time.time()
fps = 1 / (cTime - pTime)
pTime = cTime
cv2.putText(img, str(int(fps)), (10, 70), cv2.FONT_HERSHEY_PLAIN, 3,(255, 0, 255), 3)
cv2.imshow("Image", img)
cv2.waitKey(1)
if __name__ == "__main__":
main()
复制代码
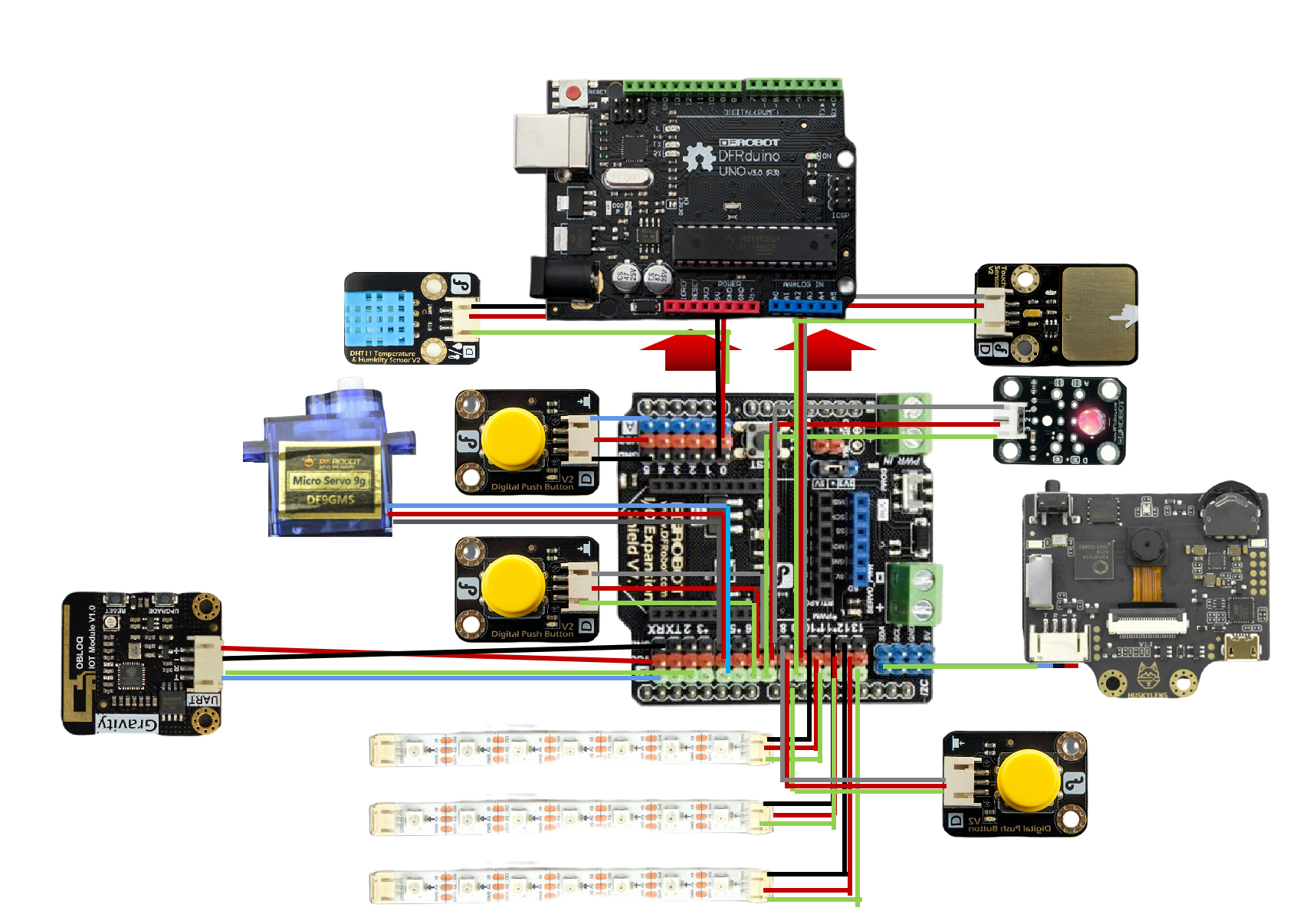
【手势控制机械钳】
import cv2
import mediapipe as mp
import time
import math
import numpy as np
from pinpong.board import Board
from pinpong.extension.microbit import *
from pinpong.libs.microbit_motor import DFServo
Board("microbit").begin()
class handDetector():
def __init__(self, mode=False, maxHands=2, detectionCon=0.8, trackCon=0.5):
self.mode = mode
self.maxHands = maxHands
self.detectionCon = detectionCon
self.trackCon = trackCon
self.mpHands = mp.solutions.hands
self.hands = self.mpHands.Hands(self.mode, self.maxHands,
self.detectionCon, self.trackCon)
self.mpDraw = mp.solutions.drawing_utils
self.tipIds = [4, 8, 12, 16, 20]
def findHands(self, img, draw=True):
imgRGB = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
self.results = self.hands.process(imgRGB)
# print(results.multi_hand_landmarks)
if self.results.multi_hand_landmarks:
for handLms in self.results.multi_hand_landmarks:
if draw:
self.mpDraw.draw_landmarks(img, handLms,
self.mpHands.HAND_CONNECTIONS)
return img
def findPosition(self, img, handNo=0, draw=True):
xList = []
yList = []
bbox = []
self.lmList = []
if self.results.multi_hand_landmarks:
myHand = self.results.multi_hand_landmarks[handNo]
for id, lm in enumerate(myHand.landmark):
# print(id, lm)
h, w, c = img.shape
cx, cy = int(lm.x * w), int(lm.y * h)
xList.append(cx)
yList.append(cy)
# print(id, cx, cy)
self.lmList.append([id, cx, cy])
if draw:
cv2.circle(img, (cx, cy), 5, (255, 0, 255), cv2.FILLED)
xmin, xmax = min(xList), max(xList)
ymin, ymax = min(yList), max(yList)
bbox = xmin, ymin, xmax, ymax
if draw:
cv2.rectangle(img, (xmin - 20, ymin - 20), (xmax + 20, ymax + 20),(0, 255, 0), 2)
return self.lmList, bbox
def fingersUp(self):
fingers = []
# Thumb
if self.lmList[self.tipIds[0]][1] > self.lmList[self.tipIds[0] - 1][1]:
fingers.append(1)
else:
fingers.append(0)
# Fingers
for id in range(1, 5):
if self.lmList[self.tipIds[id]][2] < self.lmList[self.tipIds[id] - 2][2]:
fingers.append(1)
else:
fingers.append(0)
# totalFingers = fingers.count(1)
return fingers
def findDistance(self, p1, p2, img, draw=True,r=15, t=3):
x1, y1 = self.lmList[p1][1:]
x2, y2 = self.lmList[p2][1:]
cx, cy = (x1 + x2) // 2, (y1 + y2) // 2
if draw:
cv2.line(img, (x1, y1), (x2, y2), (255, 0, 255), t)
cv2.circle(img, (x1, y1), r, (255, 0, 255), cv2.FILLED)
cv2.circle(img, (x2, y2), r, (255, 0, 255), cv2.FILLED)
#cv2.circle(img, (cx, cy), r, (0, 0, 255), cv2.FILLED)
length = math.hypot(x2 - x1, y2 - y1)
return length, img, [x1, y1, x2, y2, cx, cy]
def numberMap(x, in_min, in_max, out_min, out_max):
return (x - in_min) * (out_max - out_min) / (in_max - in_min) + out_min
def main():
global dis,i
i=0
dis=[0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0]
pTime = 0
cTime = 0
cap = cv2.VideoCapture(0)
detector = handDetector()
S8 = DFServo(8)
while True:
success, img = cap.read()
img = detector.findHands(img)
lmList, bbox = detector.findPosition(img)
if len(lmList) != 0:
#print(lmList[4])
dis1 = detector.findDistance(8,4,img)
dis2 = detector.findDistance(0,17,img)
dis[i]= dis1[0]/dis2[0]
i=i+1
if i>19:
i=0
dis_avg=np.mean(dis)*10
angle=int(numberMap(dis_avg,20,1,40,100))
S8.angle(angle)
cTime = time.time()
fps = 1 / (cTime - pTime)
pTime = cTime
cv2.putText(img, str(int(fps)), (10, 70), cv2.FONT_HERSHEY_PLAIN, 3,(255, 0, 255), 3)
cv2.imshow("Image", img)
cv2.waitKey(1)
if __name__ == "__main__":
main()
复制代码







 沪公网安备31011502402448
沪公网安备31011502402448
 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶


 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创客造
创客造
 编辑选择奖
编辑选择奖
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






