本帖最后由 云天 于 2022-1-21 23:17 编辑
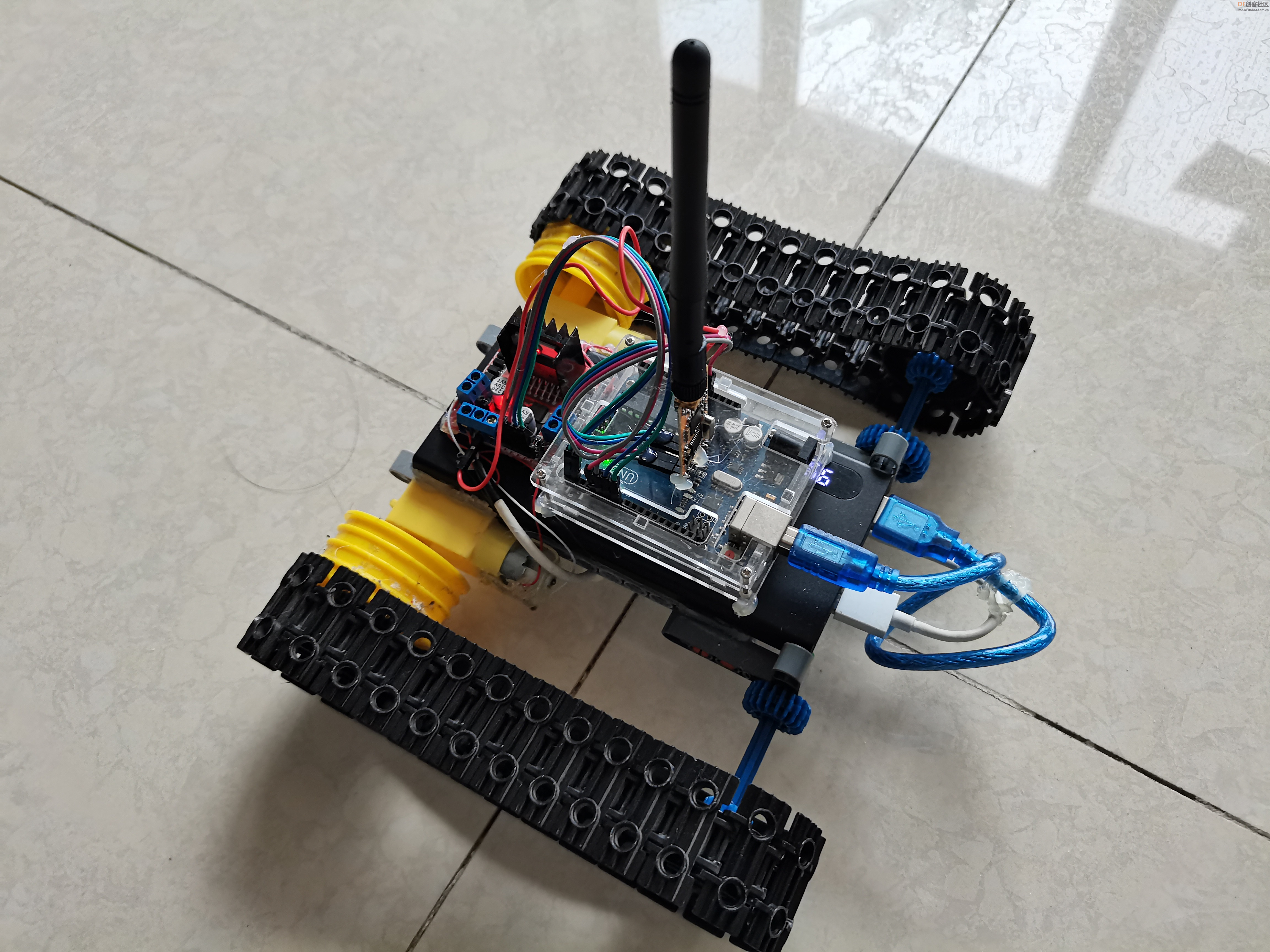
制作一辆遥控履带小车,可远距离遥控小车。使用APC220无线数传(含天线)。
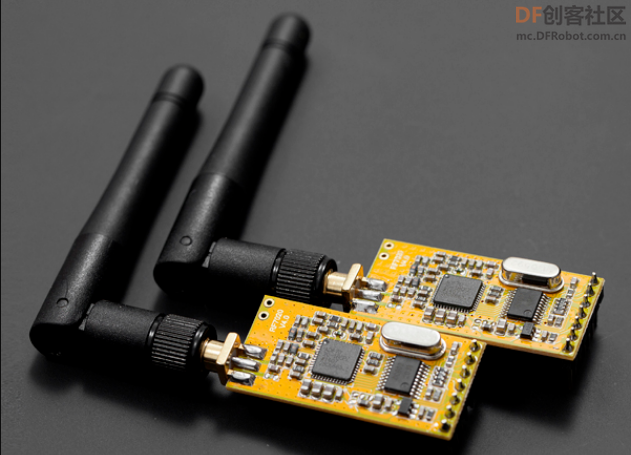
【APC220无线数传(含天线)】
APC220模块是高度集成半双工微功率无线数据传输模块,其嵌入高速单片机和高性能射频芯片。直接使用APC220模块进行两块MCU之间的交互。
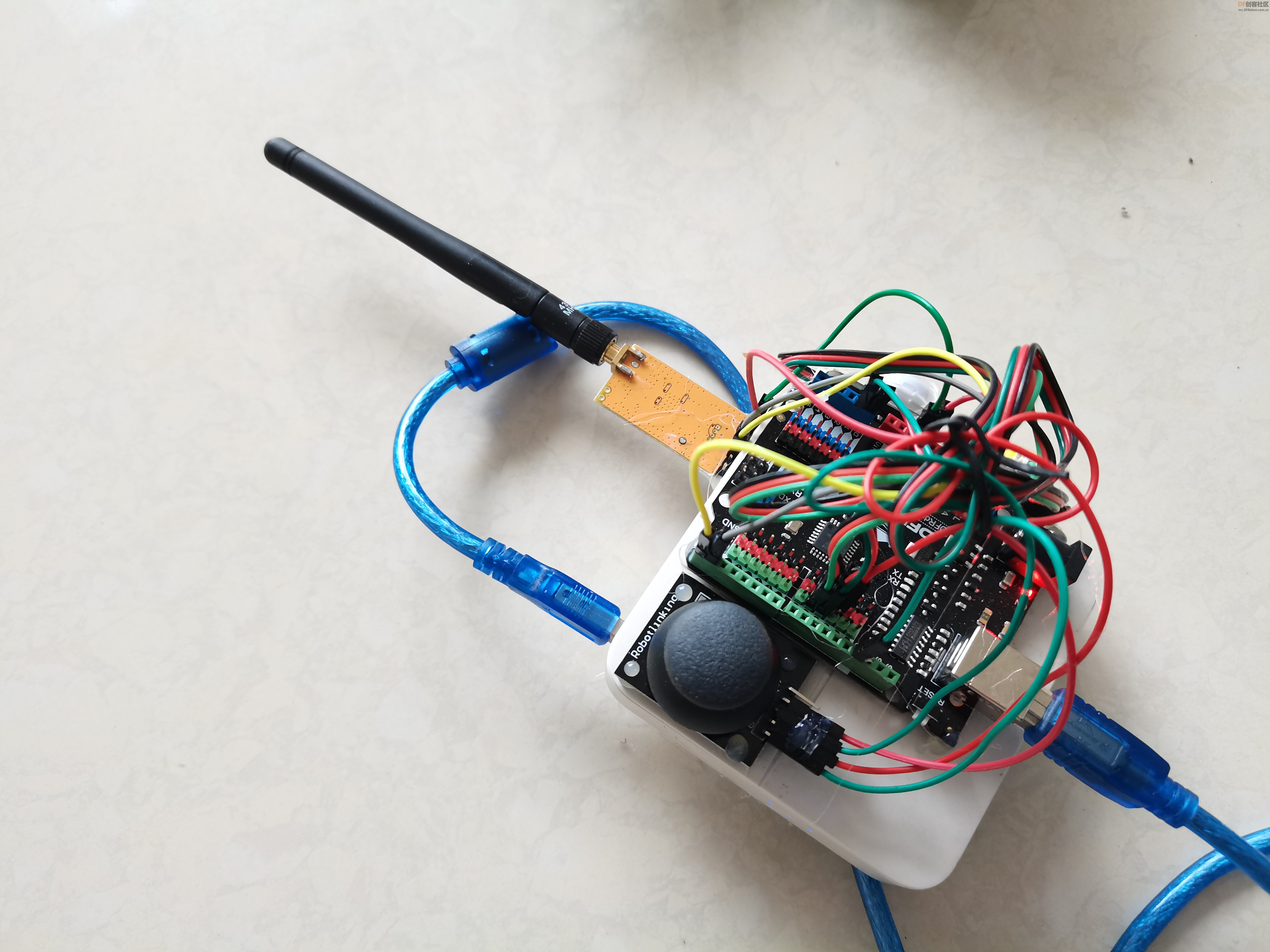
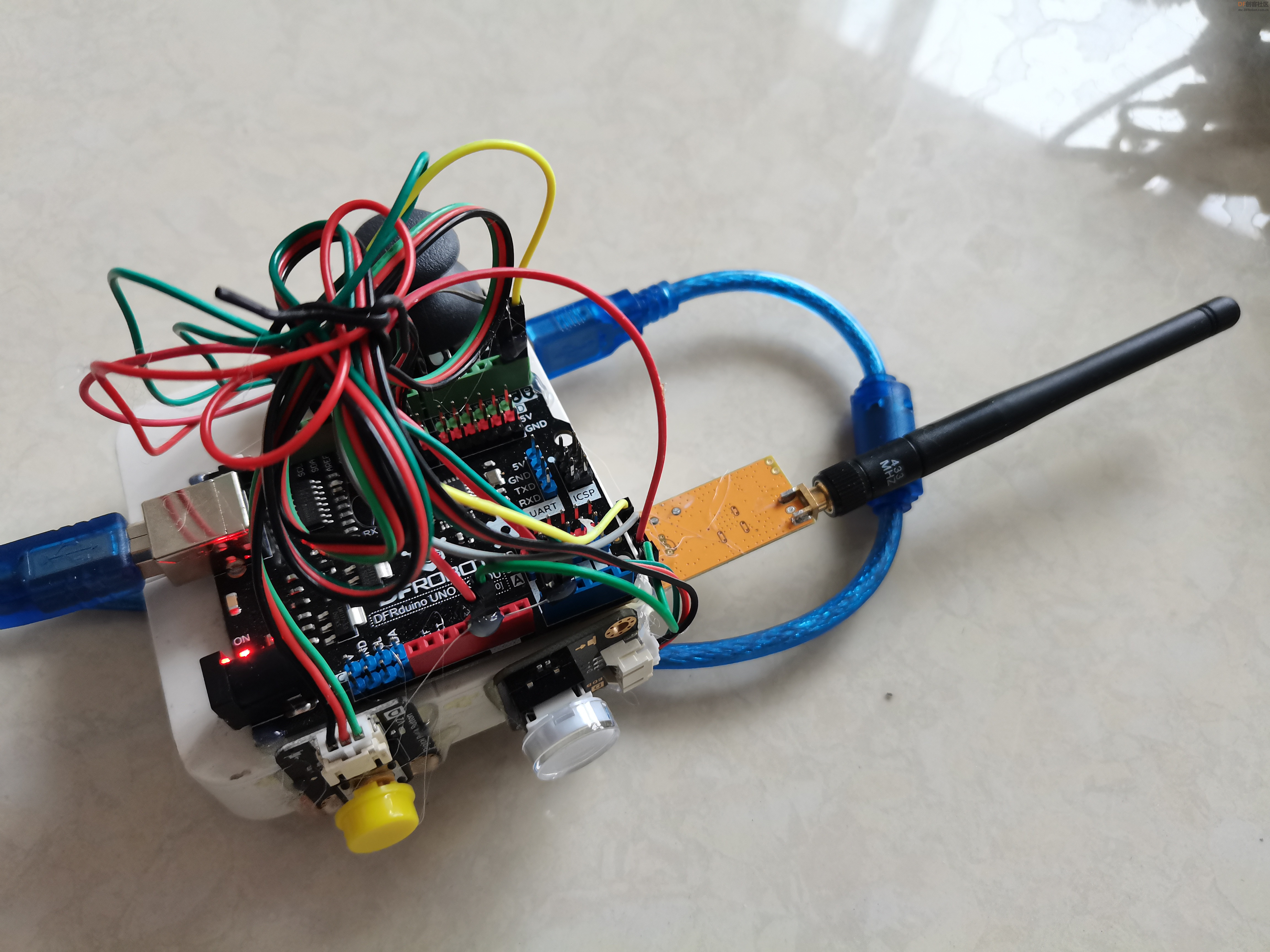
【遥控器】
遥控器使用Arduino,遥杆Vrx接A0引脚,Vry接A1引脚,用于控制小车前后左右方向。按钮接9,10引脚,简单控制小车前进、停止。APC220模块TX、RX接Arduino对应的RX、TX。
【遥控器程序】
-
-
- bool a;
- bool b;
- int value=0;
- void setup()
- {
- pinMode(13, OUTPUT);
- pinMode(10, INPUT);
- Serial.begin(9600); //Set serial baud rate to 9600
- }
-
- void loop()
- {
- value=analogRead(A0);
- if(value<10){
- Serial.write("l");
- }
- if(value>1000){
- Serial.write("r");
- }
- value=analogRead(A1);
- if(value<10){
- Serial.write("b");
- }
- if(value>1000){
- Serial.write("f");
- }
- a=digitalRead(10);
- b=digitalRead(9);
- if(a==HIGH){
- Serial.write("f");
- digitalWrite(13, LOW);
- }
- if(b==HIGH){
- Serial.write("s");
- }
- }
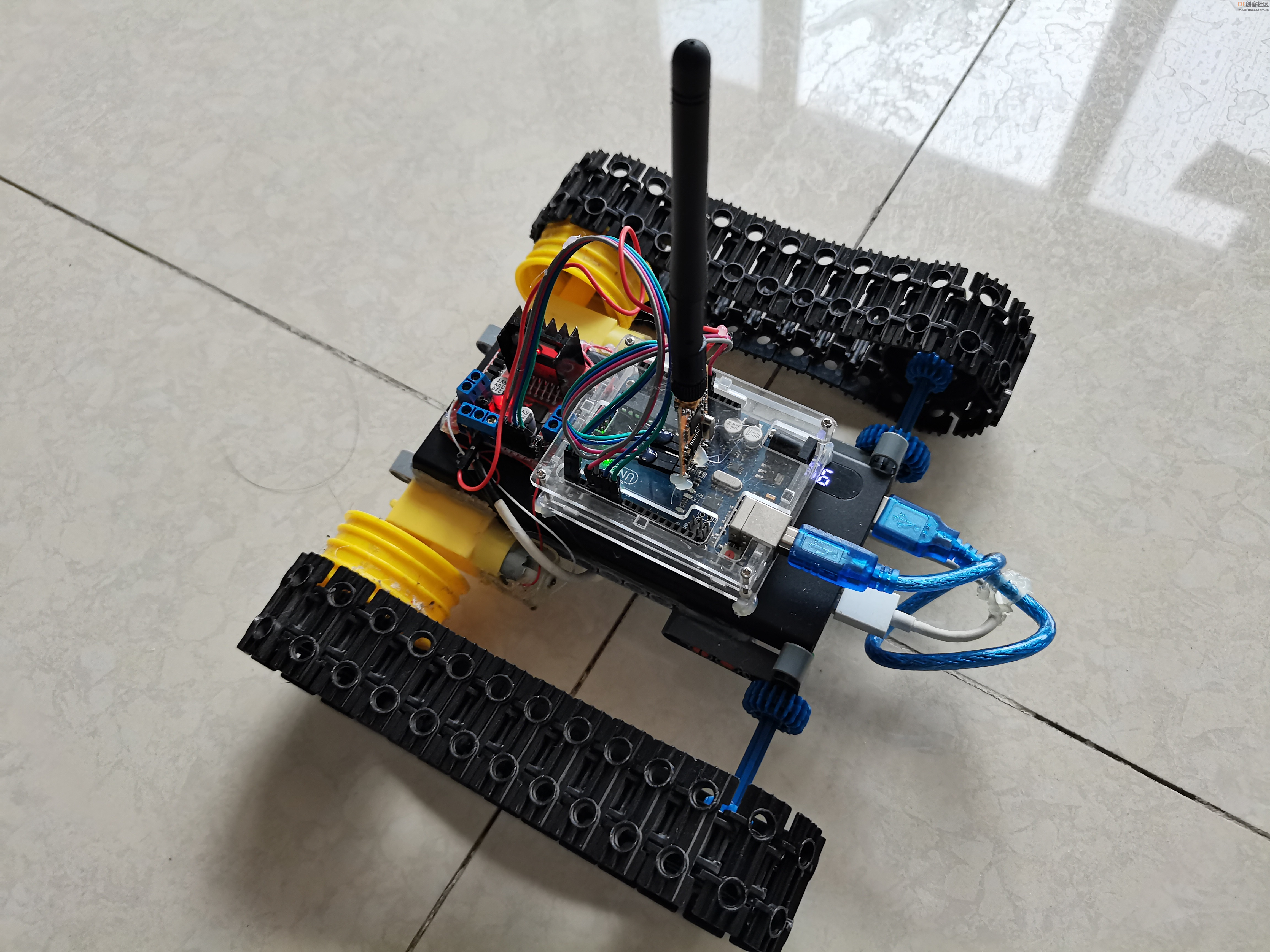
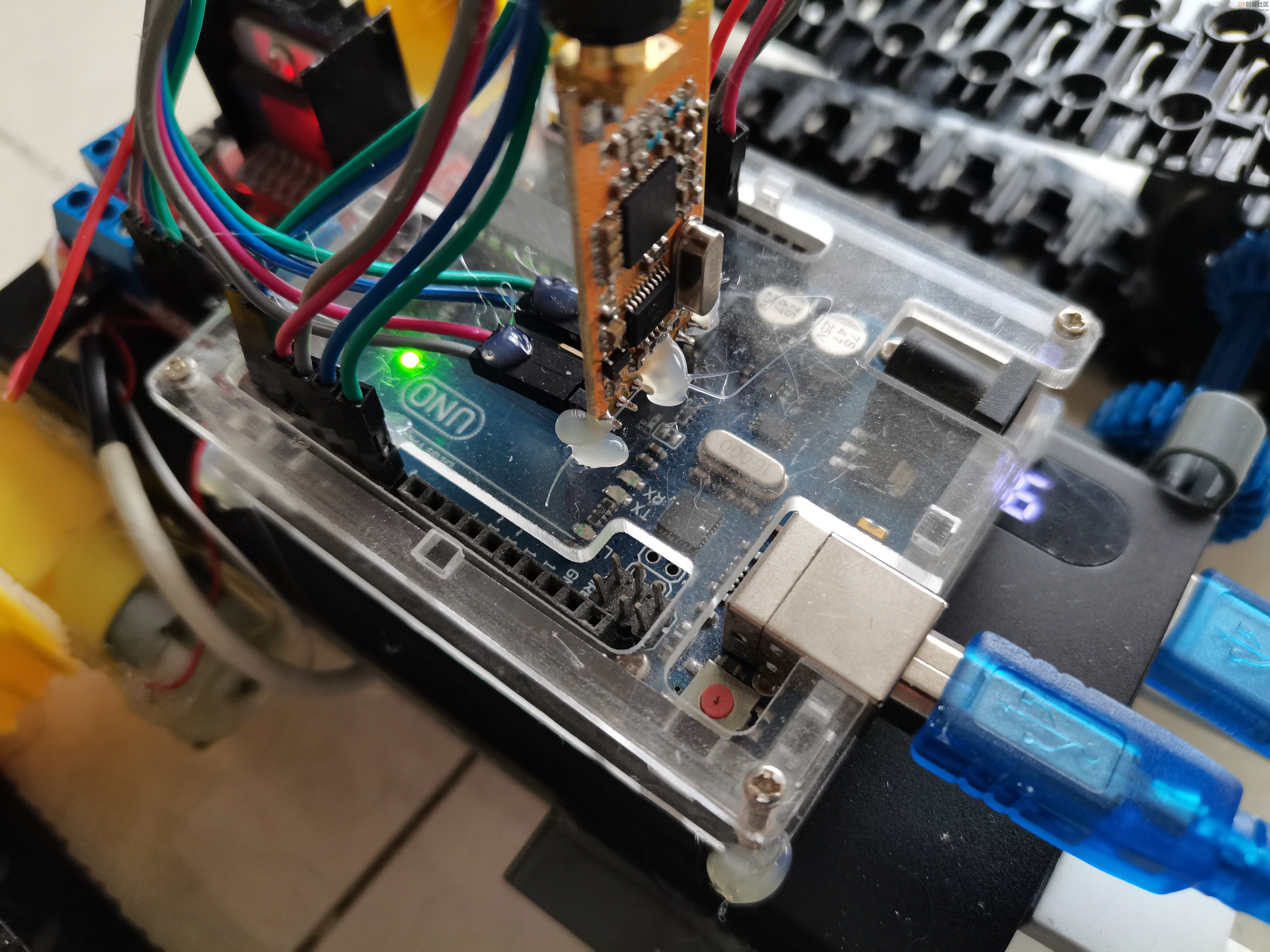
【履带车】
APC220模块TX、RX接Arduino对应的RX、TX。
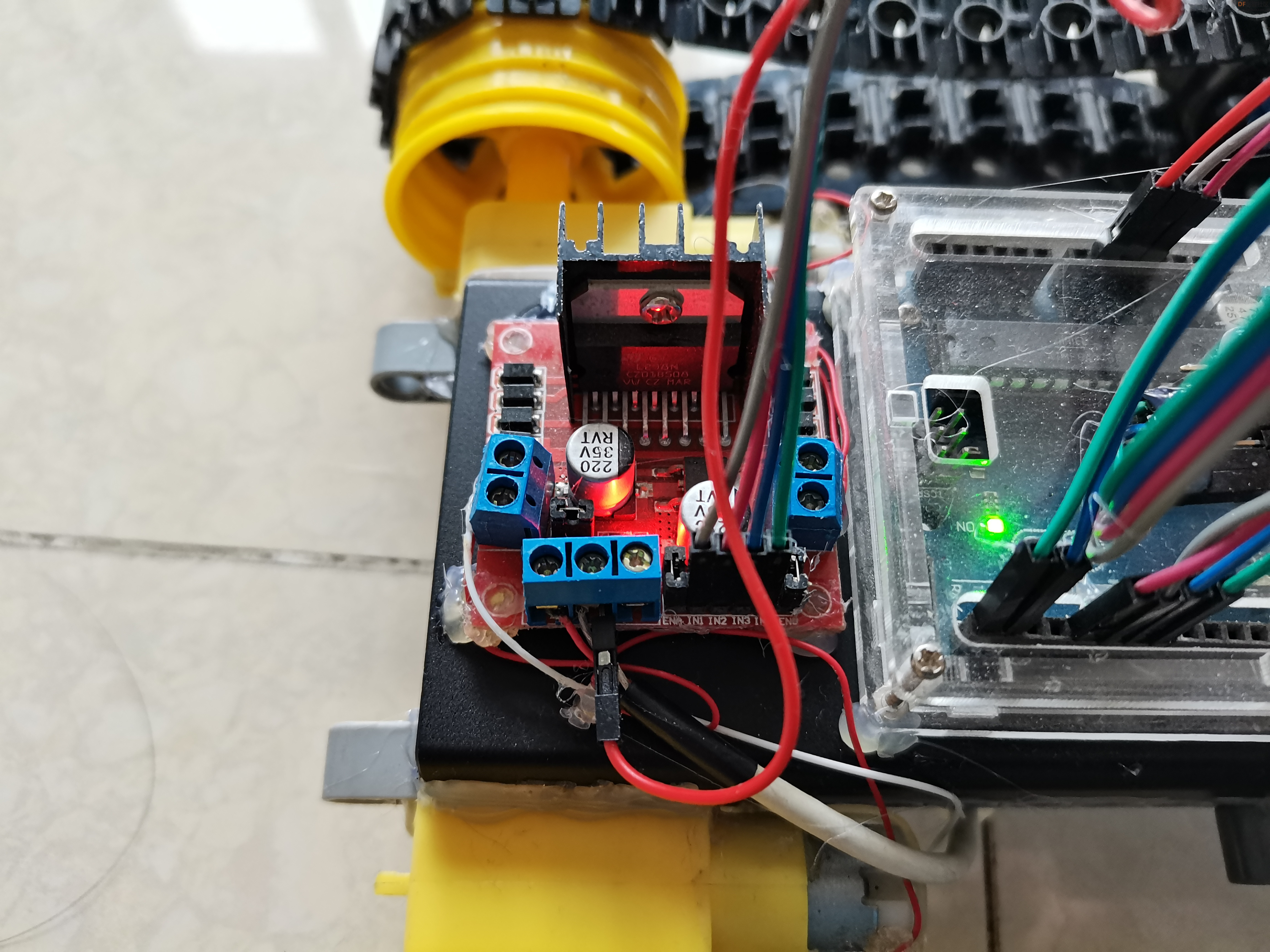
电机驱动使用L289N红板,接Arduino的4,5,6,7四个引脚。
履带使用其它机器人的套件,因与电机接口问题,只能使用热熔胶。电源使用充电宝,并做为小车主底板,与电机连接依然使用热熔胶(车体结构强度不够)。
【履带车程序】
-
-
- char a;
- void setup()
- {
- pinMode(13, OUTPUT);
- pinMode(4, OUTPUT);
- pinMode(5, OUTPUT);
- pinMode(6, OUTPUT);
- pinMode(7, OUTPUT);
- Serial.begin(9600); //Set serial baud rate to 9600
- }
-
- void loop()
- {
- a=Serial.read();
-
- if(a=='s'){
- digitalWrite(13, LOW);
- digitalWrite(4, LOW);
- digitalWrite(5, LOW);
- digitalWrite(6, LOW);
- digitalWrite(7, LOW);
- }
- if(a=='l'){
-
- digitalWrite(4, HIGH);
- digitalWrite(5, LOW);
- digitalWrite(6, LOW);
- digitalWrite(7, LOW);
- }
- if(a=='r'){
-
- digitalWrite(4, LOW);
- digitalWrite(5, LOW);
- digitalWrite(6, HIGH);
- digitalWrite(7, LOW);
- }
- if(a=='f'){
- digitalWrite(13, HIGH);
- digitalWrite(4, HIGH);
- digitalWrite(5, LOW);
- digitalWrite(6, HIGH);
- digitalWrite(7, LOW);
- }
- if(a=='b'){
- digitalWrite(13, LOW);
- digitalWrite(4, LOW);
- digitalWrite(5, HIGH);
- digitalWrite(6, LOW);
- digitalWrite(7, HIGH);
- }
- }
【演示视频】
| 




 沪公网安备31011502402448
沪公网安备31011502402448
 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶



 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创客造
创客造
 编辑选择奖
编辑选择奖
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






