|
13360| 26
|
【花雕体验】14 行空板pinpong库测试外接传感器模块 |
|
本帖最后由 驴友花雕 于 2022-6-30 11:14 编辑 1、pinpong库是一套控制开源硬件主控板的Python库,基于Firmata协议并兼容MicroPython语法,5分钟即可让你上手使用Python控制开源硬件。借助于pinpong库,直接用Python代码就能给各种常见的开源硬件编程。其原理是给开源硬件烧录一个特定的固件,使开源硬件可以通过串口与电脑通讯,执行各种命令。 pinpong库的名称由“Pin”和“Pong”组成,“Pin”指引脚,“PinPong”为“乒乓球”的谐音,指信号的往复。pinpong库的设计,是为了让开发者在开发过程中不用被繁杂的硬件型号束缚,而将重点转移到软件的实现。哪怕程序编写初期用Arduino开发,部署时改成了掌控板,只要修改一下硬件的参数就能正常运行,实现了“一次编写处处运行”。  |
|
6、蜂鸣器 (1)有源蜂鸣器(Active buzzer)内建了一组固定的频率,只要接通电源,就会发出固定的音调。蜂鸣器的源,这里指的是震荡源。也就是说有源蜂鸣器内部带有多谐振荡器,可以产生 1.5kHZ-2.5kHZ 的电压信号,由此有源蜂鸣器才能发声。有源蜂鸣器、无源蜂鸣器的外型很像,一般有源蜂鸣器会在上面贴一个白色贴纸,另外,有源蜂鸣器底部也会有胶封,无源蜂鸣器的底部可以直接看到电路板。有源蜂鸣器往往比无源的贵一点,就是因为里面多个震荡电路。有源蜂鸣器的优点是,编程控制简单方便,适合大部分的简单使用场景。缺点是只能在固定频率上运行,从而降低了随着应用需求变化而实现备用频率的灵活性。有源蜂鸣器工作的理想信号是直流电,通常标示为VDC、VDD等。因为蜂鸣器内部有一简单的振荡电路,能将恒定的直流电转化成一定频率的脉冲信号,从而实现磁场交变,带动铝片振动发音。但是在某些有源蜂鸣器在特定的交流信号下也可以工作,只是对交流信号的电压和频率要求很高,此种工作方式一般不采用。  |
|
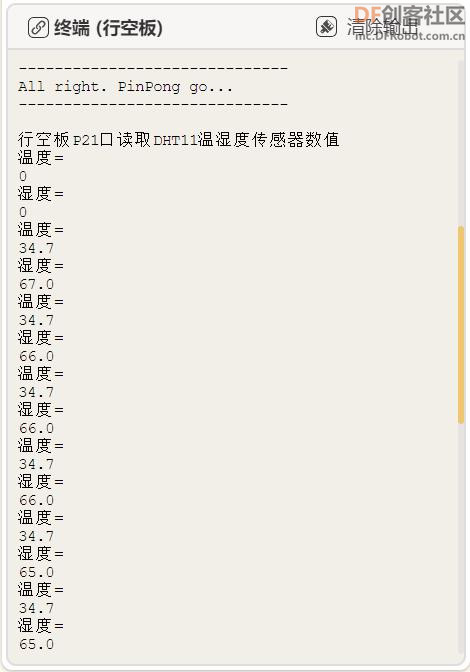
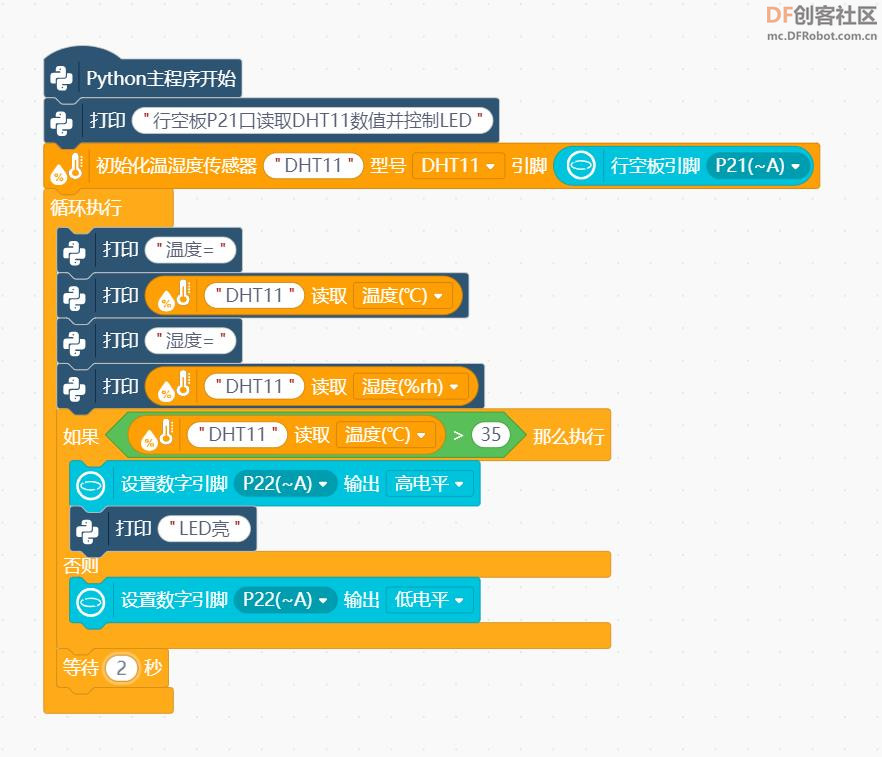
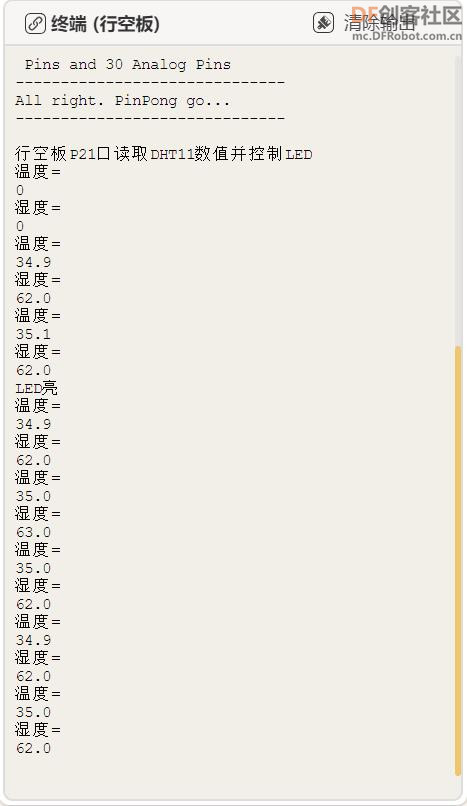
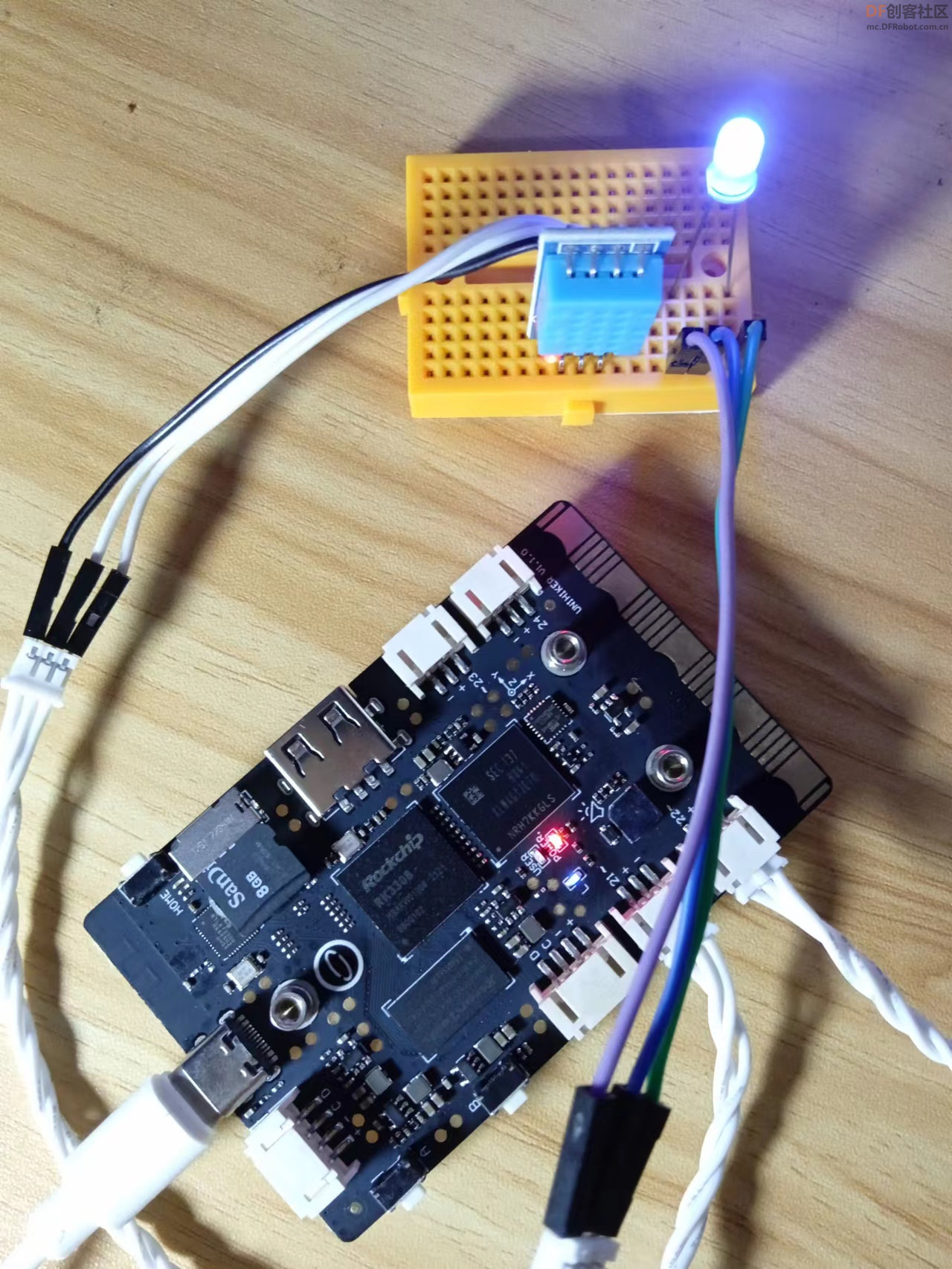
【花雕体验】14 行空板pinpong库测试外接传感器模块(之一) 行空板测试外接传感器模块——Mind+代码编程 测试程序二十三:行空板P21口读取DHT11温湿度传感器数值 实验接线:行空板P21口接DHT11温湿度传感器模块 |
|
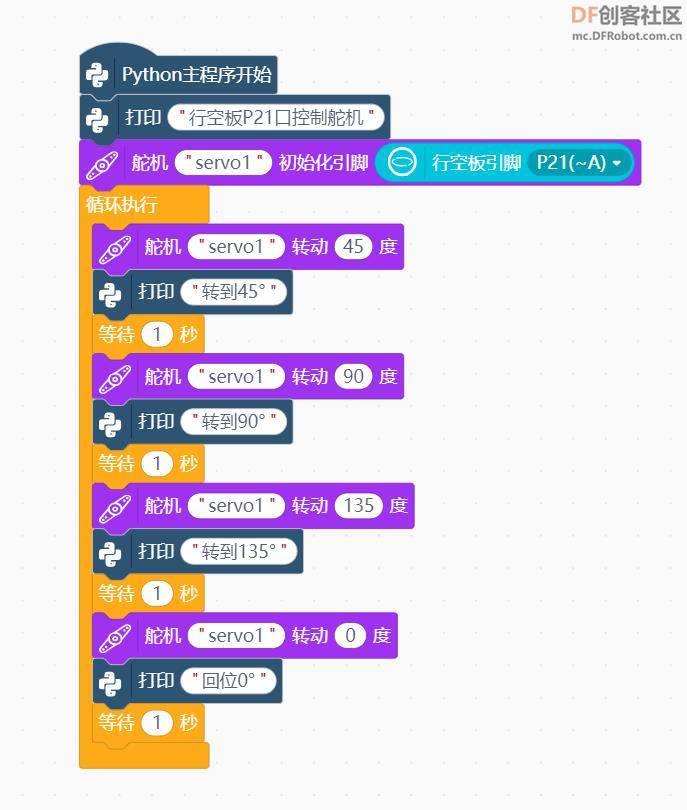
PWM信号和舵机转动角度的关系 说到舵机的控制信号,一般是脉宽调制(PWM)信号,如下图,直观反映了PWM信号和舵机转动角度的关系,你也可以简单的理解为,通过给舵机通电的时间控制,结合角度传感器的反馈信号检测和控制,实现了舵机的精确角度控制。舵机的控制信号周期为20MS的脉宽调制信号(PWM),其中脉宽从0.5ms-2.5ms,相应的舵盘位置从0-180度,呈线型变化。也就是说,给舵机提供一定的脉宽,他的输出轴就会保持一定的对应角度,无论外接转矩怎么改变,知道给他提供另外一个脉冲信号,他才会改变输出角度到新的对应的位置上。舵机内部有一个基准电路,产生周期为20MS,宽度为1.5MS的脉冲信号,有一个比较器,将外加信号与基准信号相比较,判断出方向和大小,从而产生电机的转动信号。舵机是一种位置伺服驱动器,转动范围不能超过180度,适用于那些需要不断变化并可以保持的驱动器中,比喻说机器人的关节、飞机的舵面等。 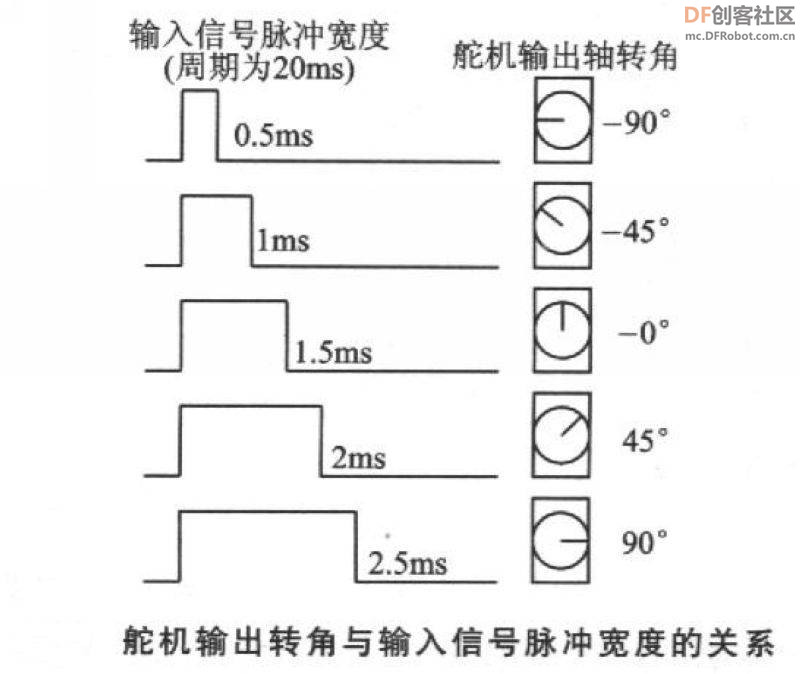  |
|
2、pinpong库导入方法 pinpong库由于支持众多的主控板及开源硬件,因此分成了3个包,board、extension和libs,board包中放置主板支持的功能及常用库,extension为定制类主控,libs中放置其他传感器的扩展库。pinpong库支持多块主控板的使用,因此可以指定板型及端口号并生成对象,因为行空板上固定为协处理器并且端口号固定,因此可以省略掉这些参数而直接初始化。  |
|
4、9G舵机 是一种位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。舵机主要由外壳、电路板、无核心马达、齿轮与位置检测器所构成。其工作原理是由接收机或者单片机发出信号给舵机,其内部有一个基准电路,产生周期为20ms,宽度为1.5ms 的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。经由电路板上的IC 判断转动方向,再驱动无核心马达开始转动,透过减速齿轮将动力传至摆臂,同时由位置检测器送回信号,判断是否已经到达定位。适用于那些需要角度不断变化并可以保持的控制系统。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。一般舵机旋转的角度范围是0 度到180 度。  |
|
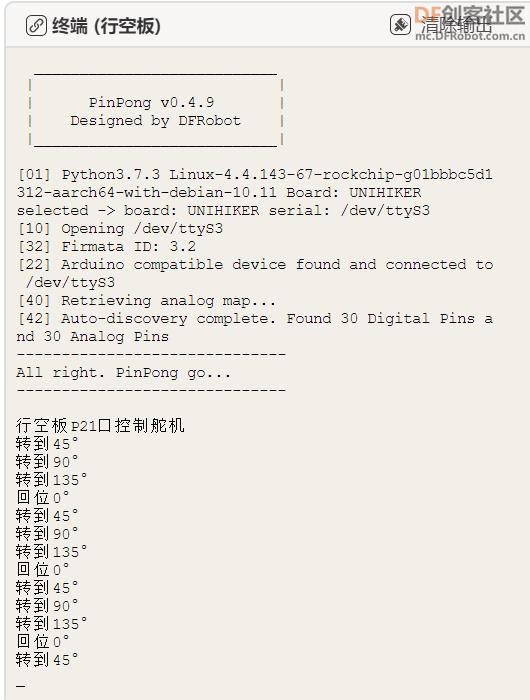
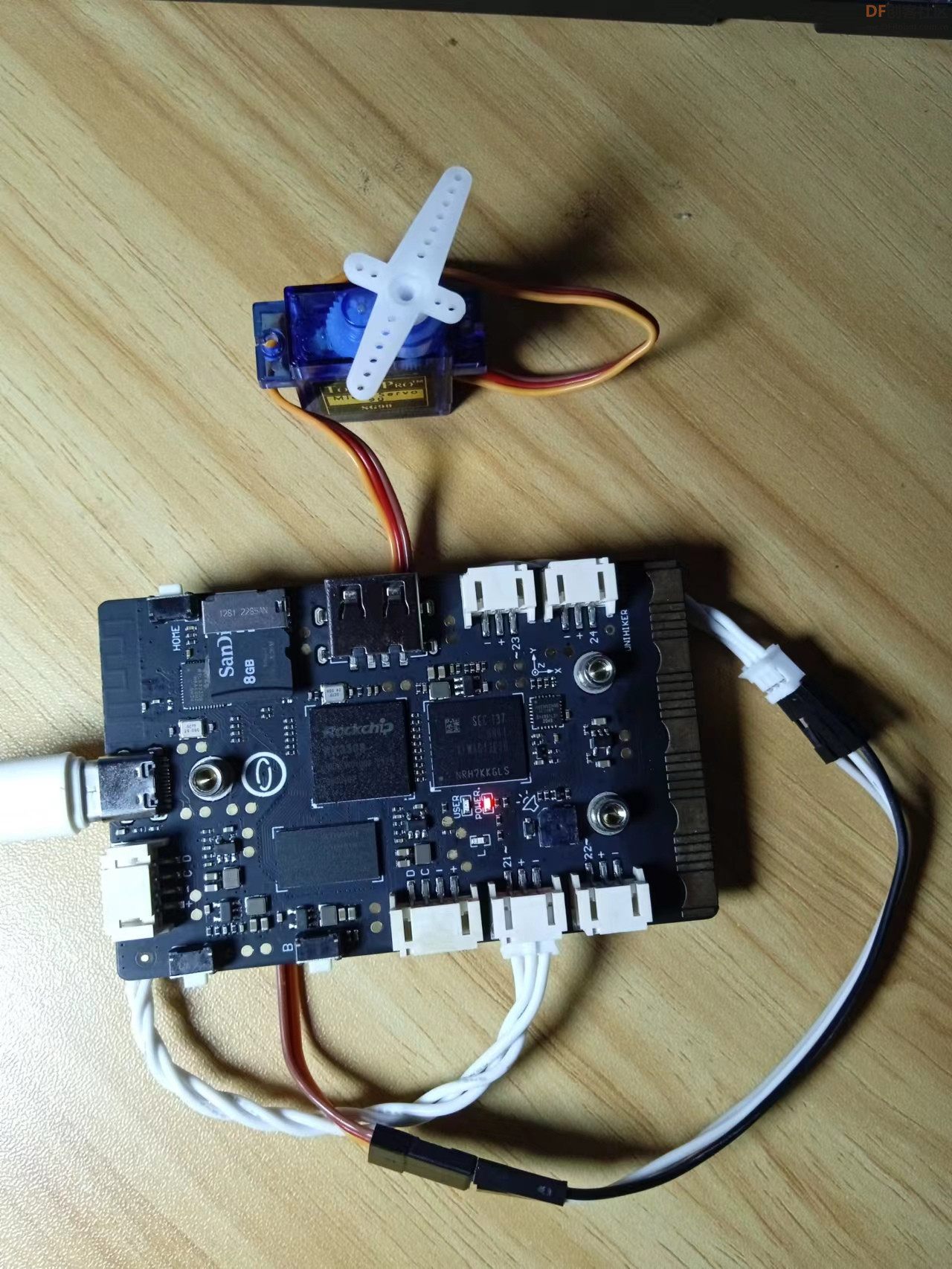
【花雕体验】14 行空板pinpong库测试外接传感器模块(之一) 行空板测试外接传感器模块——Mind+代码编程 测试程序二十一:行空板P21口控制舵机 实验接线:行空板P21口接9G舵机模块 |
|
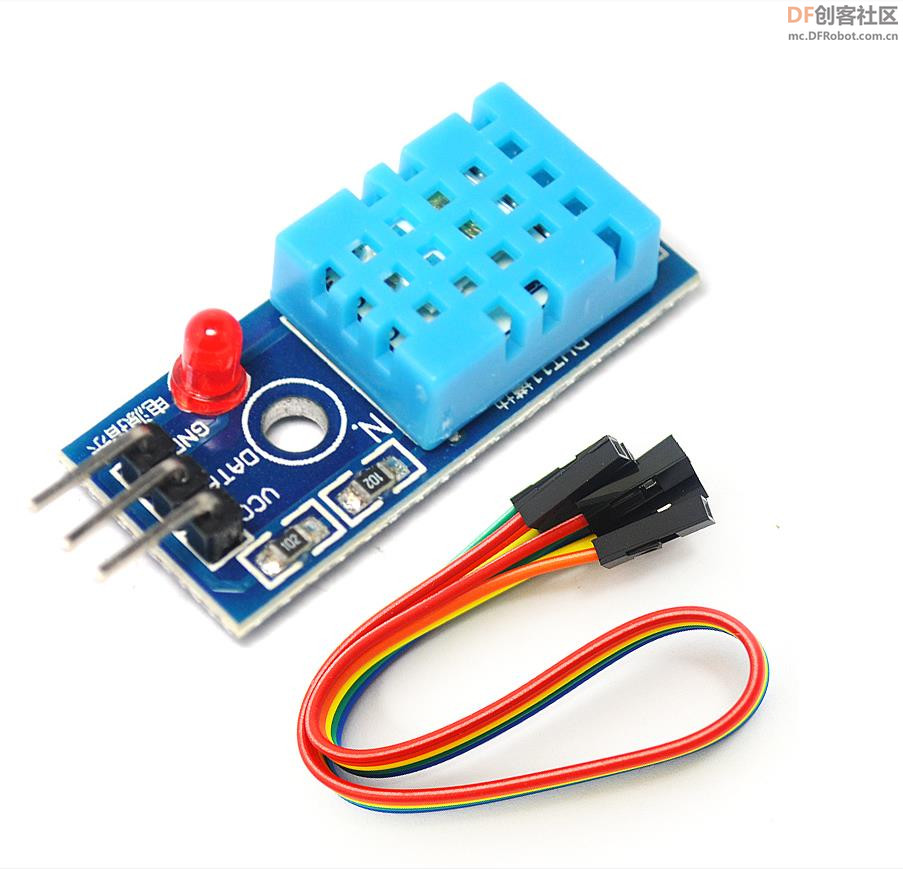
5、DHT11温湿度传感器 DHT11是一款含有已校准数字信号输出的温湿度复合传感器。它应用专用的数字模块采集技术和温湿度传感技术,确保产品具有极高的可靠性与卓越的长期稳定性。传感器包括一个电阻式感湿元件和一个NTC测温元件,并与一个高性能8位单片机相连接。因此该产品具有品质卓越、超快响应、抗干扰能力强、性价比极高等优点。每个DHT11传感器都在极为精确的湿度校验室中进行校准。校准系数以程序的形式储存在OTP内存中,传感器内部在检测信号的处理过程中要调用这些校准系数。单线制串行接口,使系统集成变得简易快捷。超小的体积、极低的功耗,信号传输距离可达20米以上,使其成为各类应用甚至最为苛刻的应用场合的最佳选则。产品为4针单排引脚封装。连接方便,特殊封装形式可根据用户需求而提供。 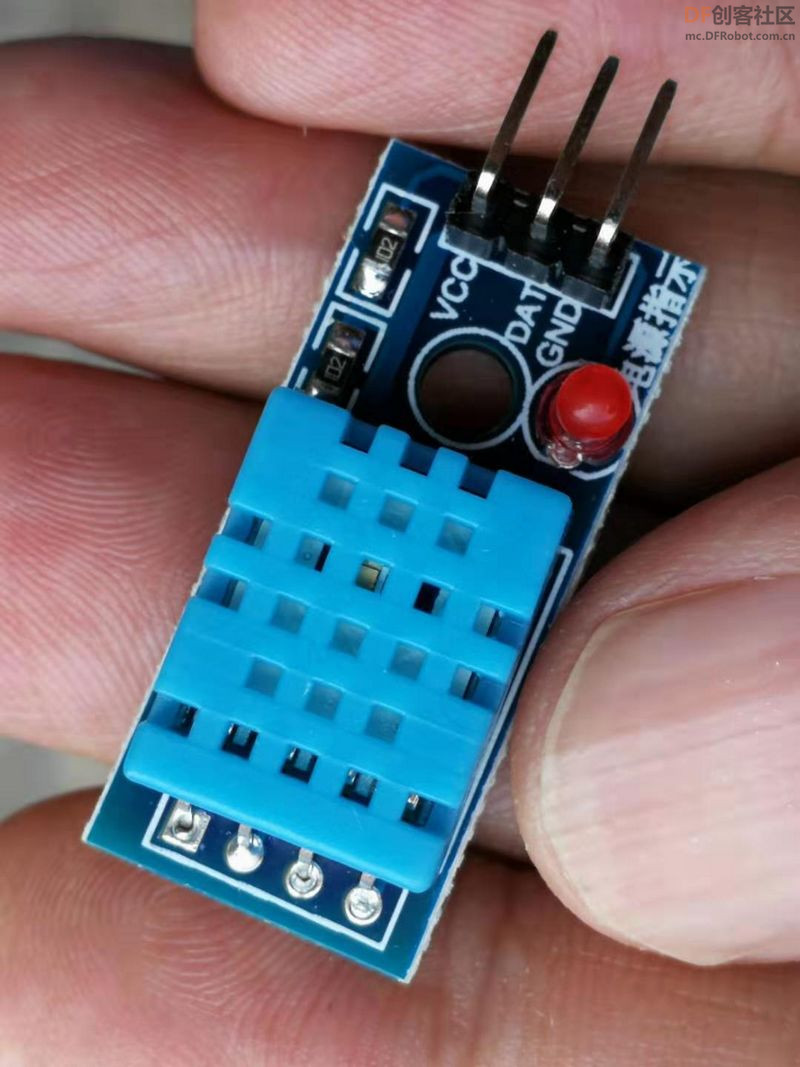 |
(2)无源蜂鸣器(Passive Buzzer)在字义上说,即不带振荡源,在没有振荡电路情况下接上直流电,因输出电压没有变化,蜂鸣器片仍然保持沉默,所以我们需从外接振荡器。看似不方便,但亦有其优点。首先,零件数量少,售价较低是常识吧!其次,我们可脱离一般蜂鸣器只可发出单音的局限,自由控制输出声音频率,便可透过编程写出不同音阶和延续时间,合成一首旋律美妙的音乐。无源蜂鸣器没有内部驱动电路,有些公司和工厂称为讯响器,国标中称为声响器。无源蜂鸣器工作的理想信号方波。如果给予直流信号蜂鸣器是不响应的,因为磁路恒定,钼片不能振动发音。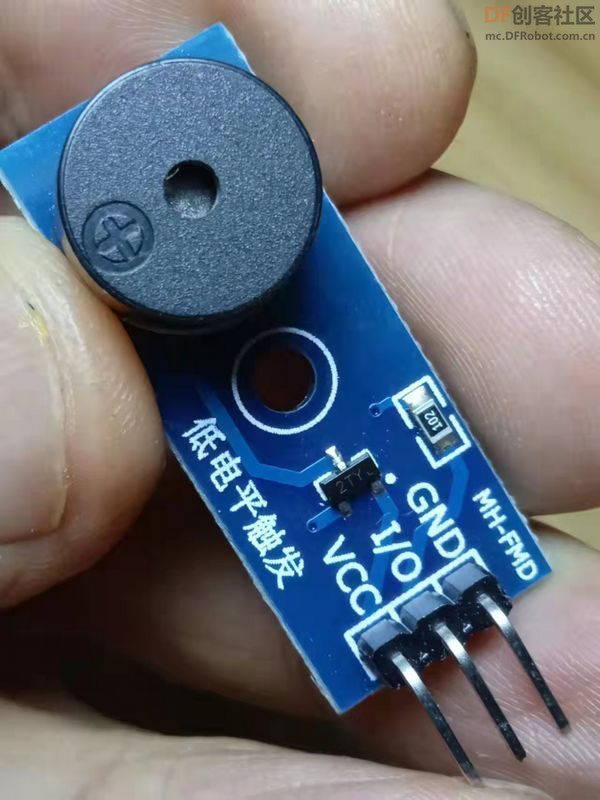 |
|
【花雕体验】14 行空板pinpong库测试外接传感器模块(之一) 行空板测试外接传感器模块——Mind+代码编程 测试程序二十五:行空板P21口驱动蜂鸣器(无源) 实验接线:行空板P21口接蜂鸣器模块 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶


 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






