|
151782| 4
|
[M10项目] 行空板 探索车 |

本帖最后由 云天 于 2023-9-24 14:15 编辑 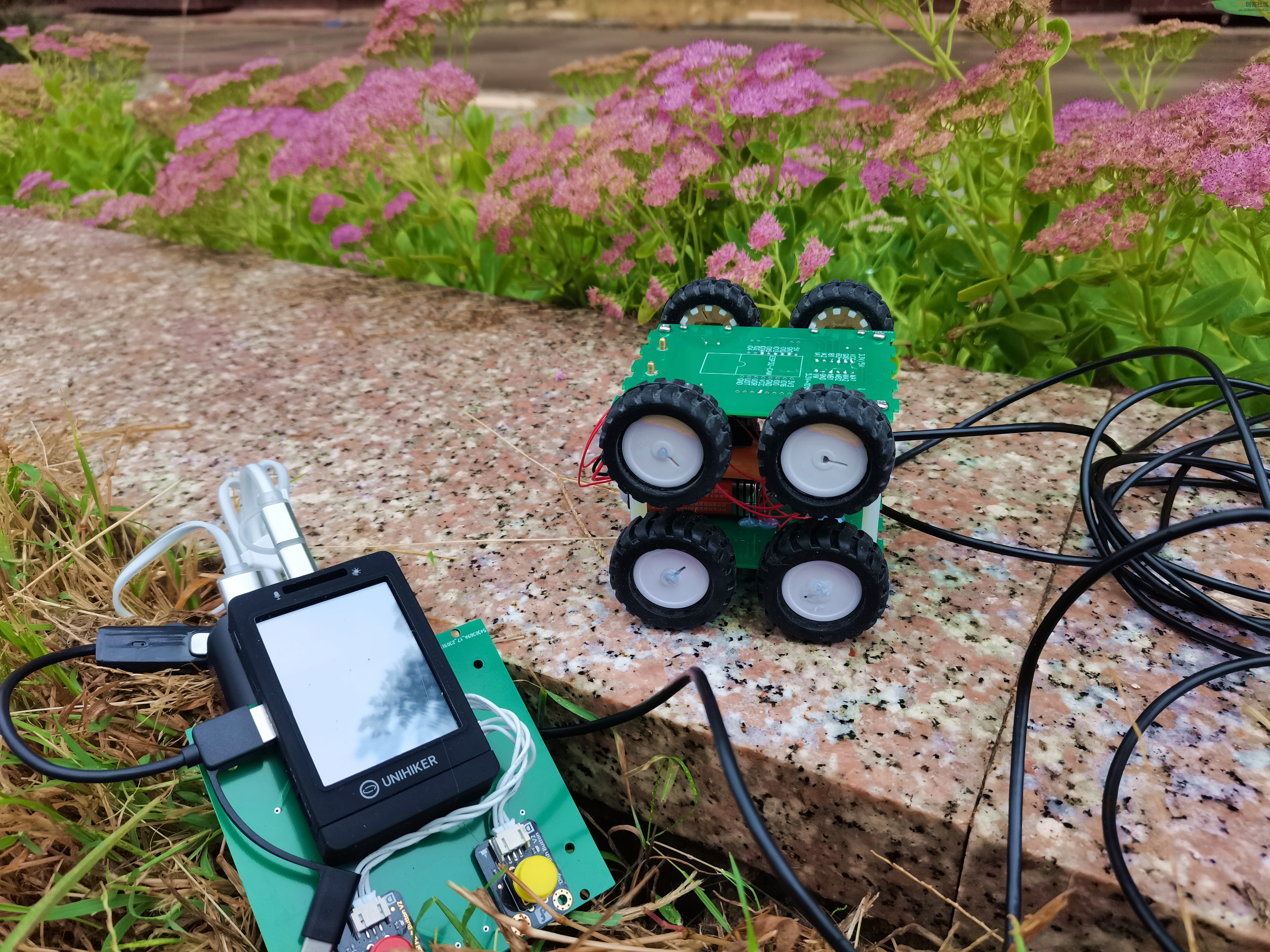 【项目背景】 目前,各种各样的社会灾害屡见不鲜,而在各种社会灾害诸如地震、矿难、煤气泄露、火灾中,很多人被困在灾难现场,然而由于各种原因致使救援人员无法进入灾难现场,无法及时了解现场的各项环境参数和受灾情况,只能实施盲目性的救援。针对这种情况本项目设计了一款智能搜救小车代替人进行救援,探测狭小空间环境,并及时地将灾难现场第一手宝贵视频资料传送回营救中心,帮助救援指挥部作出正确的判断。此智能搜救小车主要针对那些人难以到达的或者非常危险的灾难现场的救援工作开展而设计的,它主要可以通过穿越狭窄管道区域,将内部现场的影音资料进行处理后传回营救中心,从而实现盲目性的救援到理性救援的转变。 【项目设计】 ESP8266主控制作的八轮小车连接行空板开放的热点,接收来自行空板的运动控制指令。因视频图像传输需要良好的WIFI传输环境,而管道内环境复杂,有可能不能保障视频信号正常传送。所以采用行空板USB端口连接带有很长的USB数据传输线“工业检查摄像头”,摄像头固定在小车上,可在各类狭小或黑暗环境中用来拍照或录像。高发亮灯头搭配1200P高清摄像头使产品效果得到提升,即使在黑暗环境中也能展现出色彩效果同时还保留了高分辨率的图像和画面质量。镜头搭载自动曝光技术,蓝光技术,有效过滤杂光,还原真实画面,成像更清晰。摄像头镜头采用特制胶水密封,具有IP67等级的防油防水,在水下也能放心拍摄。   【项目亮点】 1.八轮设计,下面四轮用于行走,上面四个轮子同时同向转动,当向前、向后倾倒后,依然能按原运行方向运动。上下轮子如反向转动,可实现在合适的空间内,上下轮子共同与管道、墙壁摩擦,加大驱动能力。 2.摄像头采用有线连接方式,增加了视频信号传输质量,且当出现小车无法控制时,可通过拉线方式将小车回收。 3.小车上下底盘,通过嘉立创画电路图打板,电机、驱动模块、ESP8266、电源在两板之间通过导线、电路焊接。 4.通过行空板开启物联网服务、开启WIFI热点,行空板通过MQTT、WIFI热点向ESP8266发送指令。 【硬件组装】 现在的电路板是利用之前另一个项目的电路板。新的板子重新设计,嘉立创已完成免费打板,正在快递运输中。 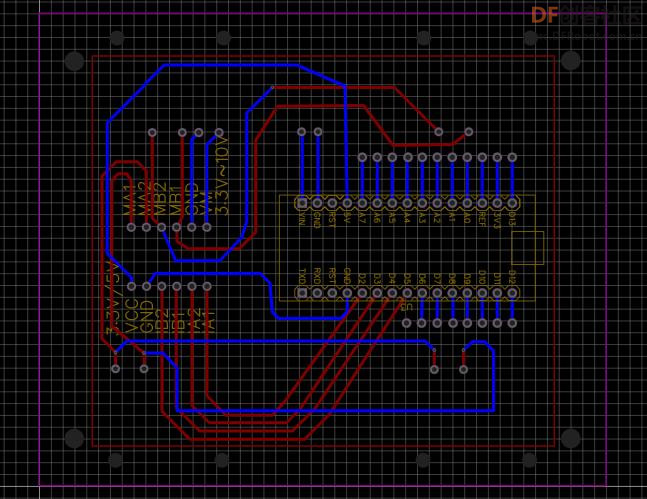 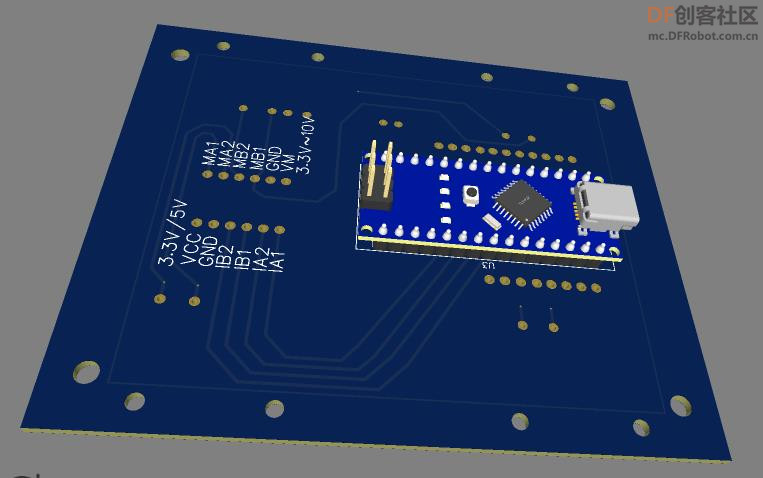 1.安装电机和驱动板 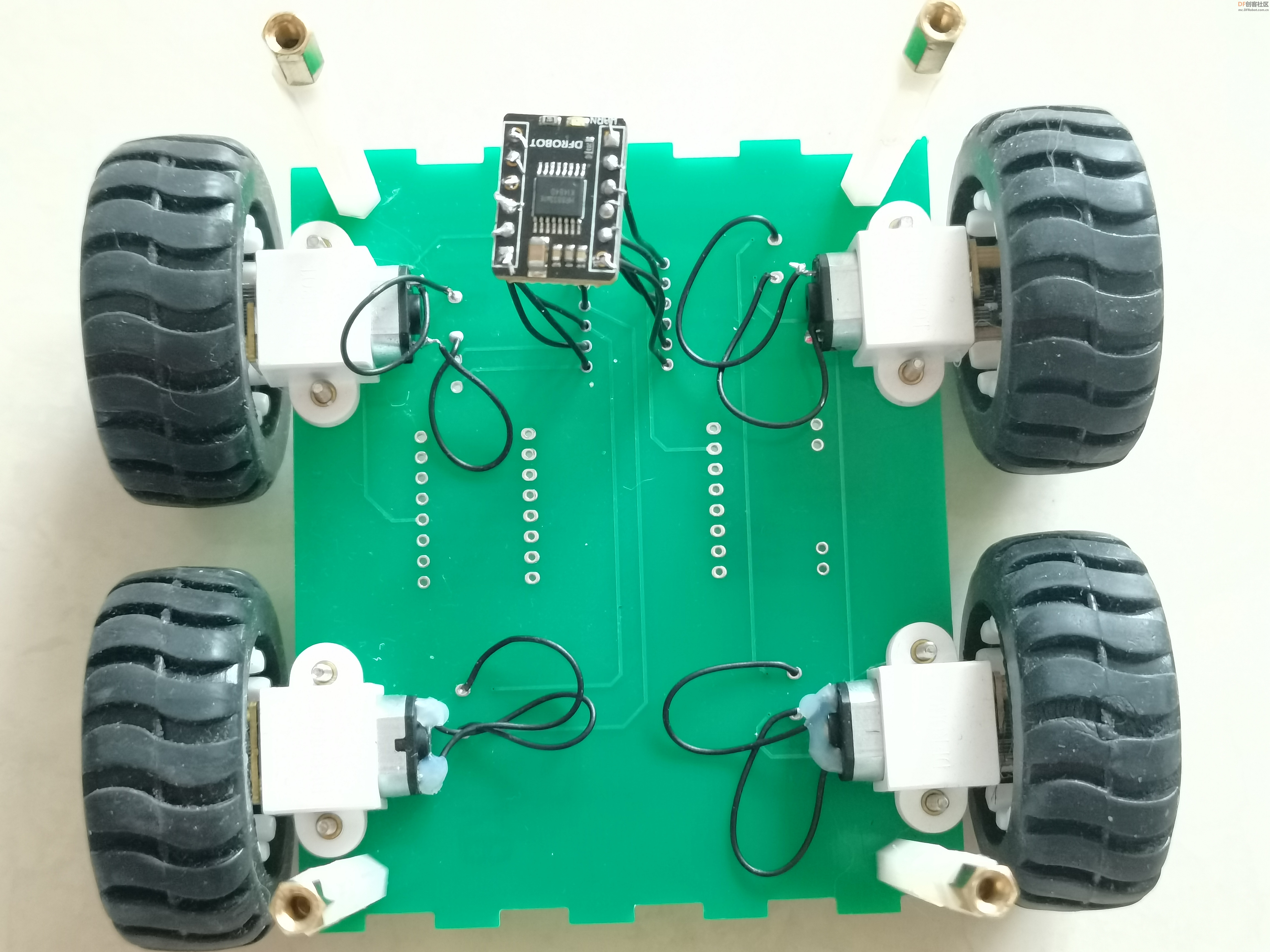 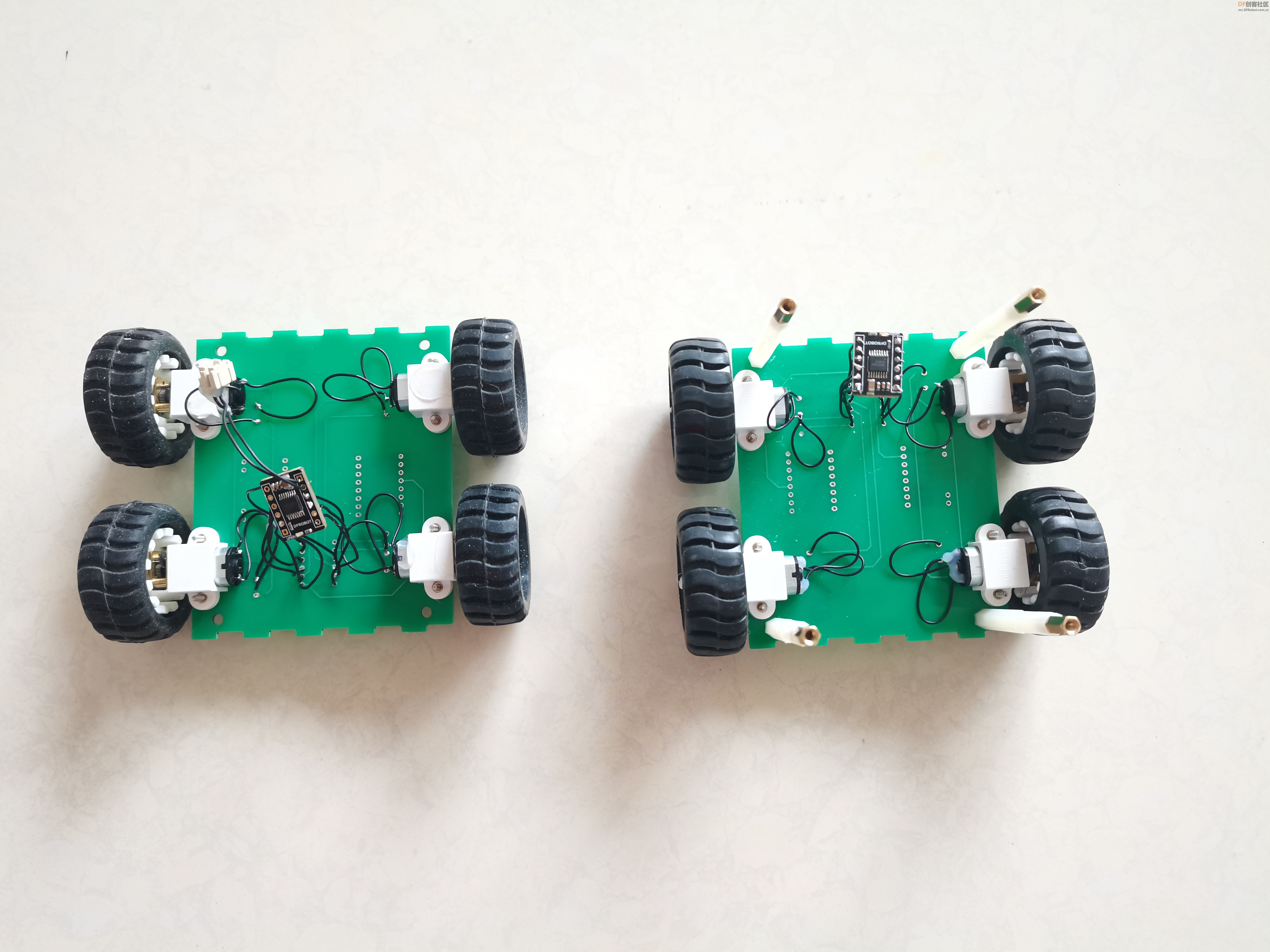 2.焊接ESP8266主控 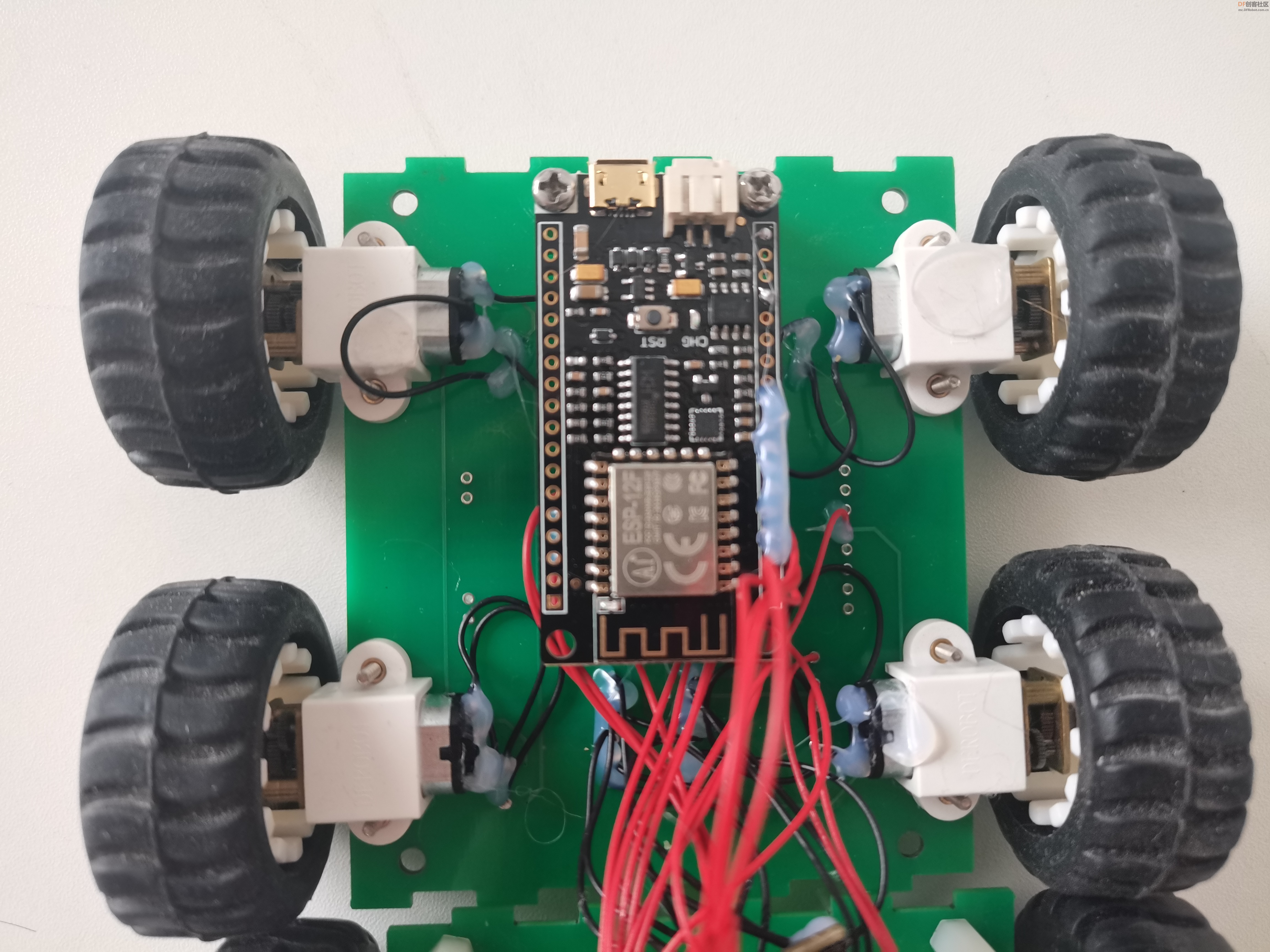 3.安装电源,9V给电机驱动供电,3.7V给主控供电 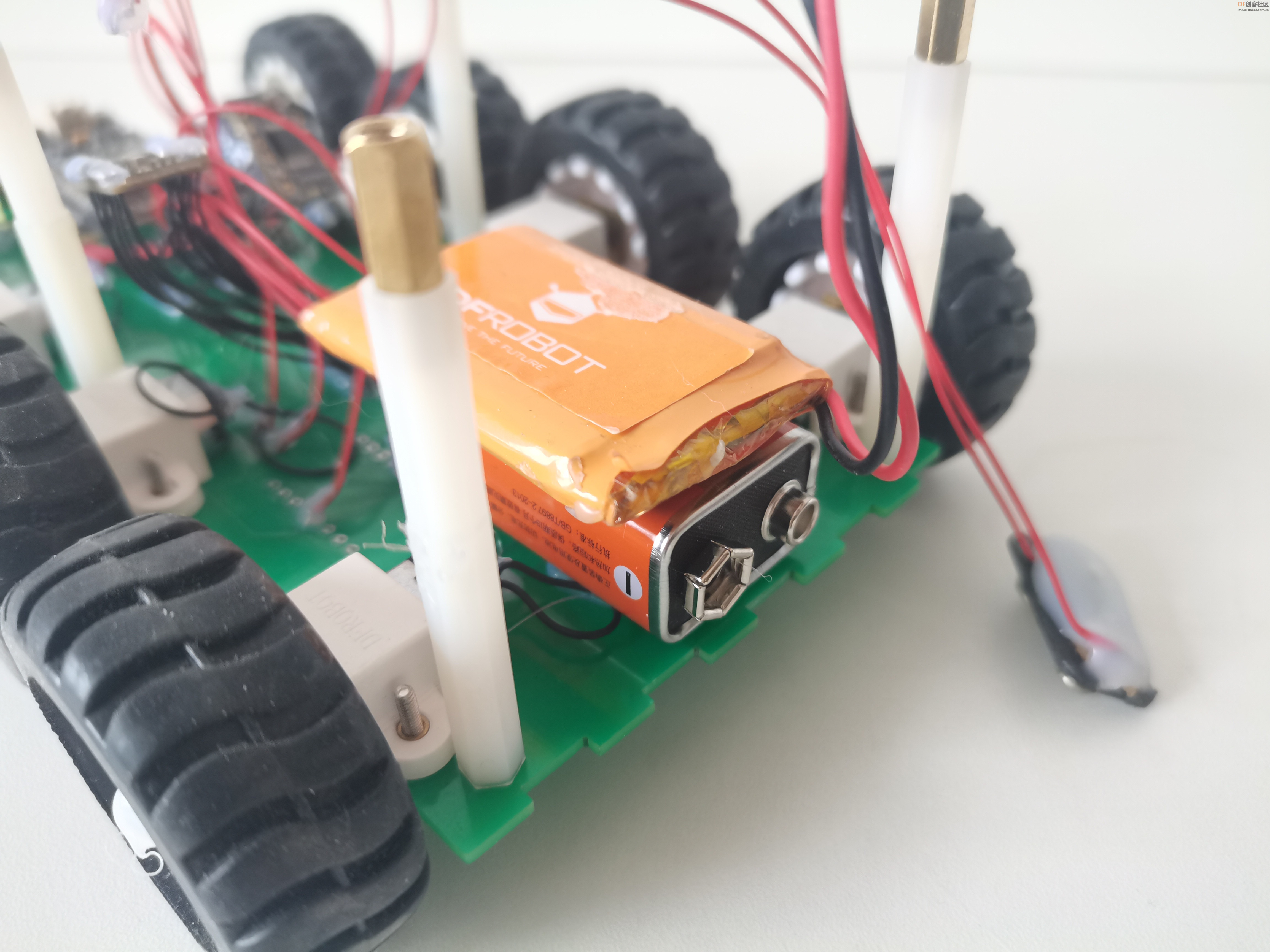 4.整体安装 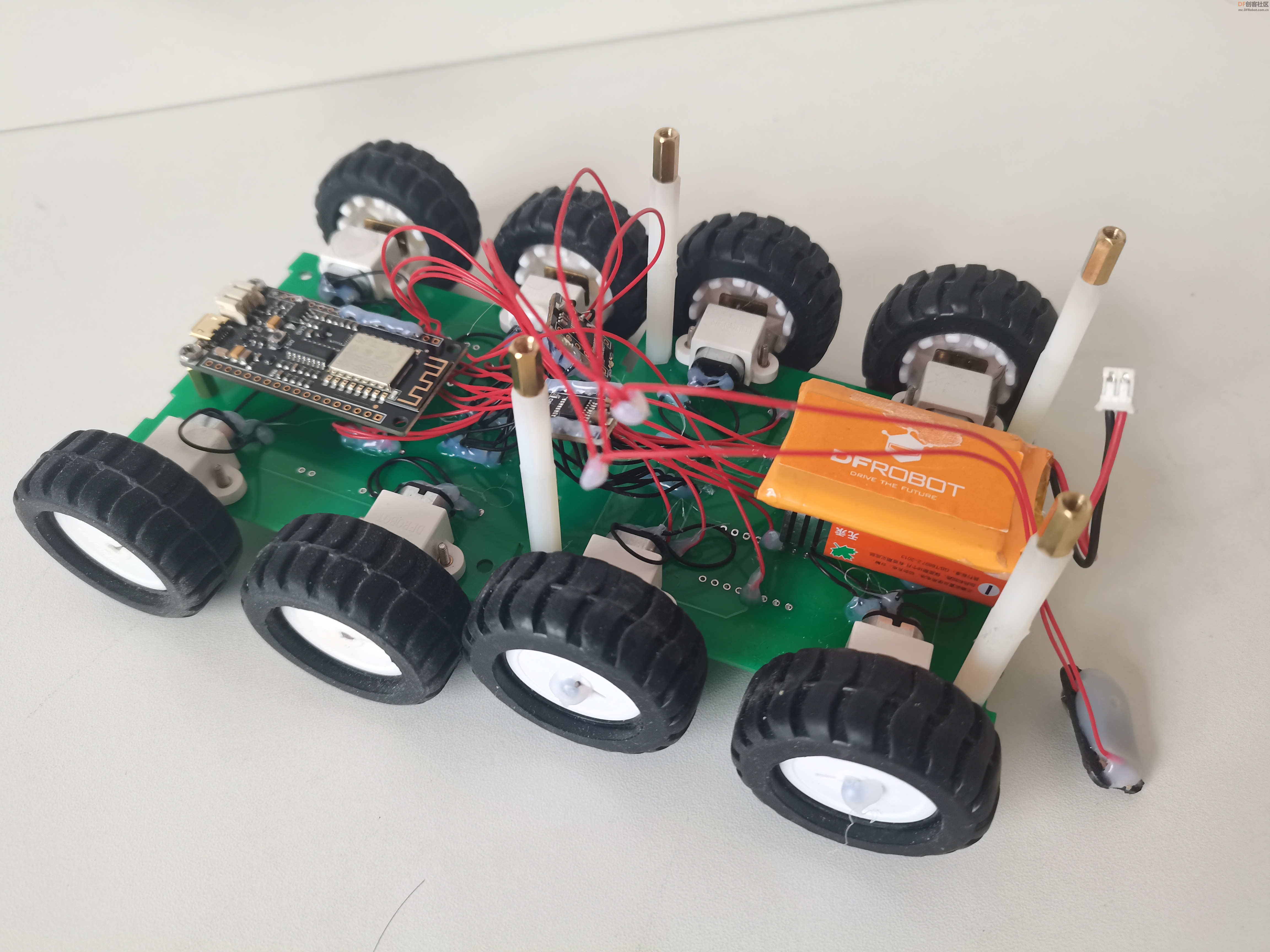 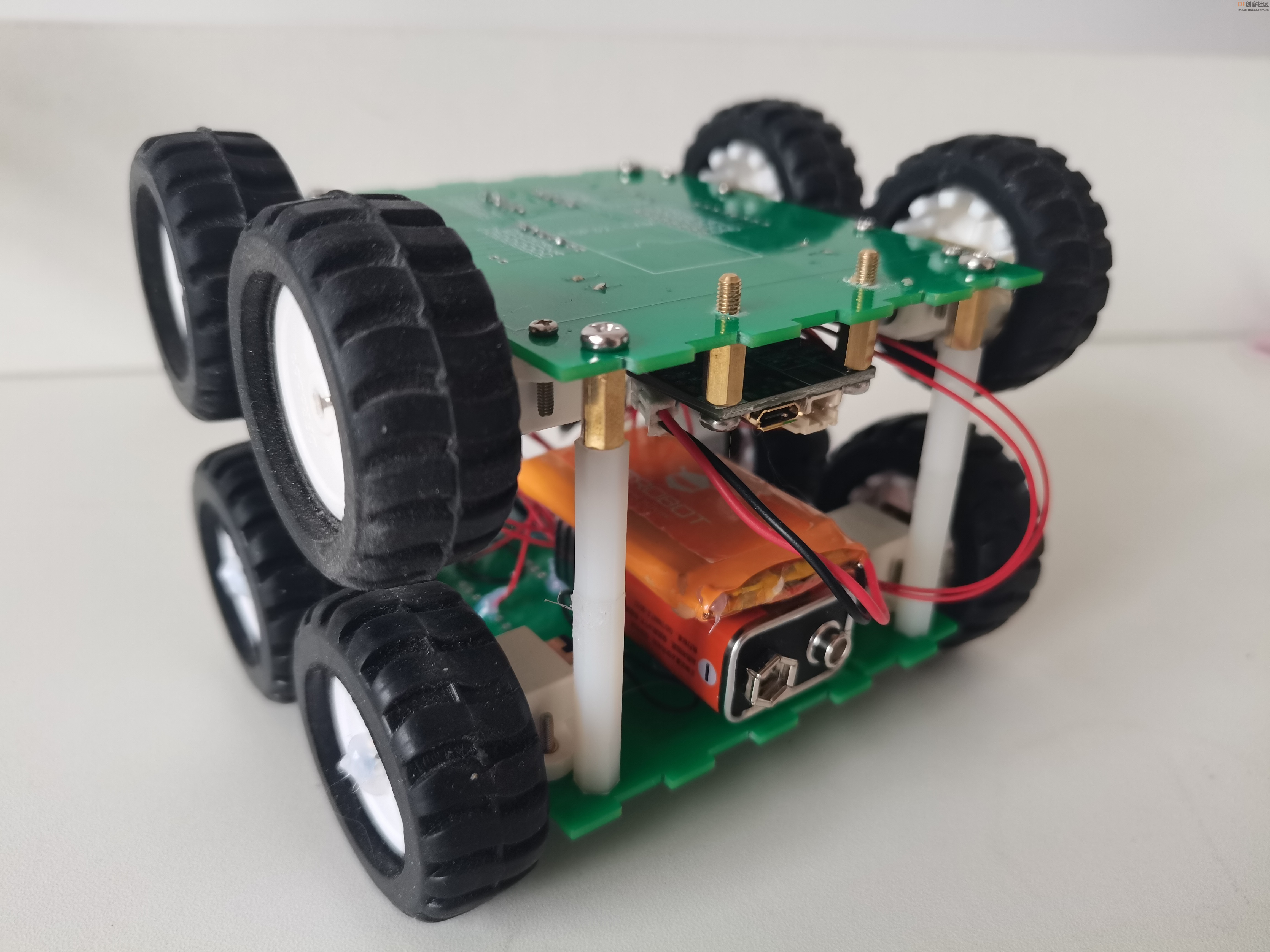 5.行空板按键与摄像头安装  6.项目完整硬件 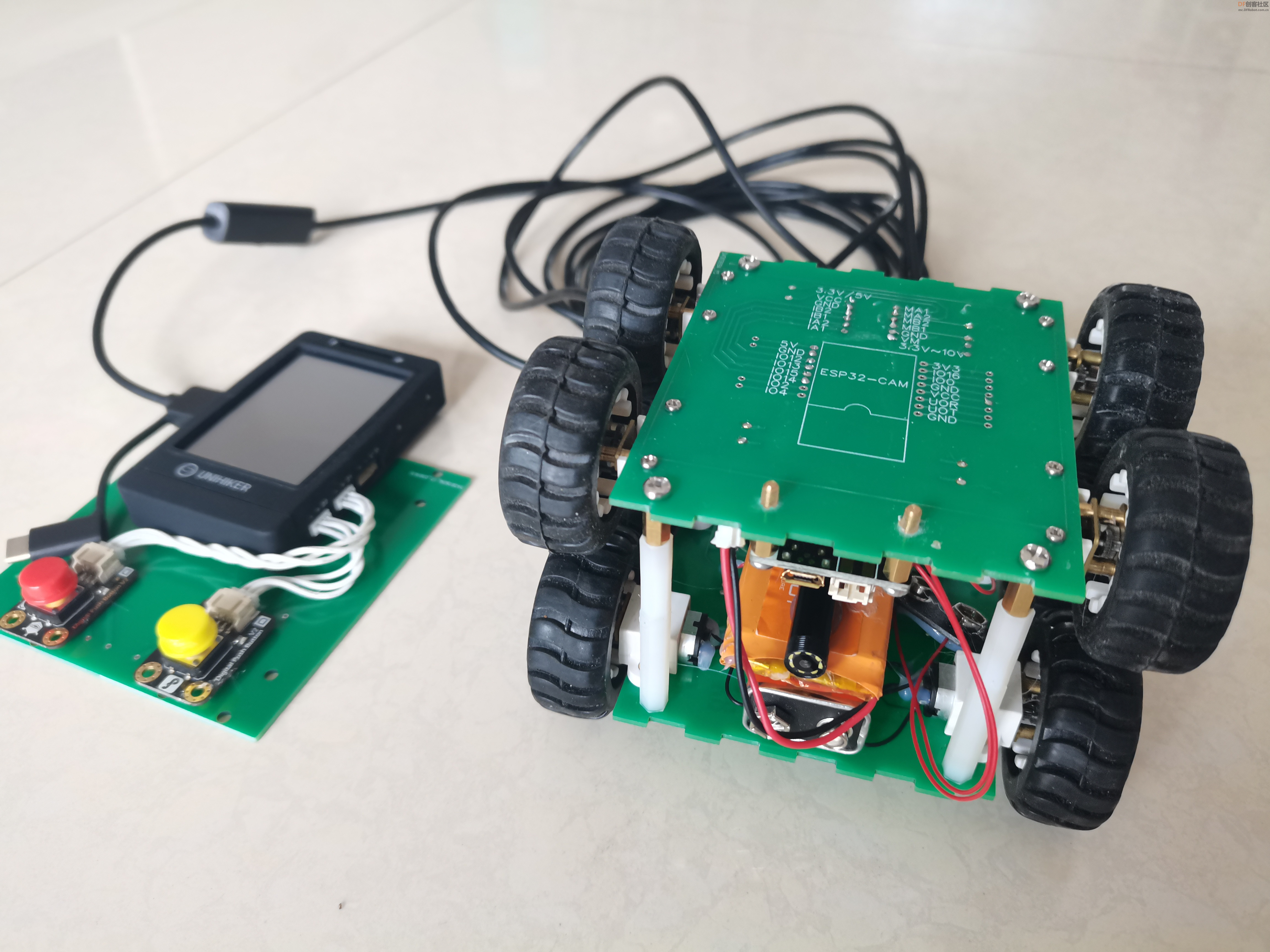   【行空板设置】 行空板开启热点,并开启物联网服务,增加主题“siot/car”。  【ESP8266小车程序】 连接行空板热点,接收行空板物联网发送来的控制指令,控制小车前进、后退、左转、右转。 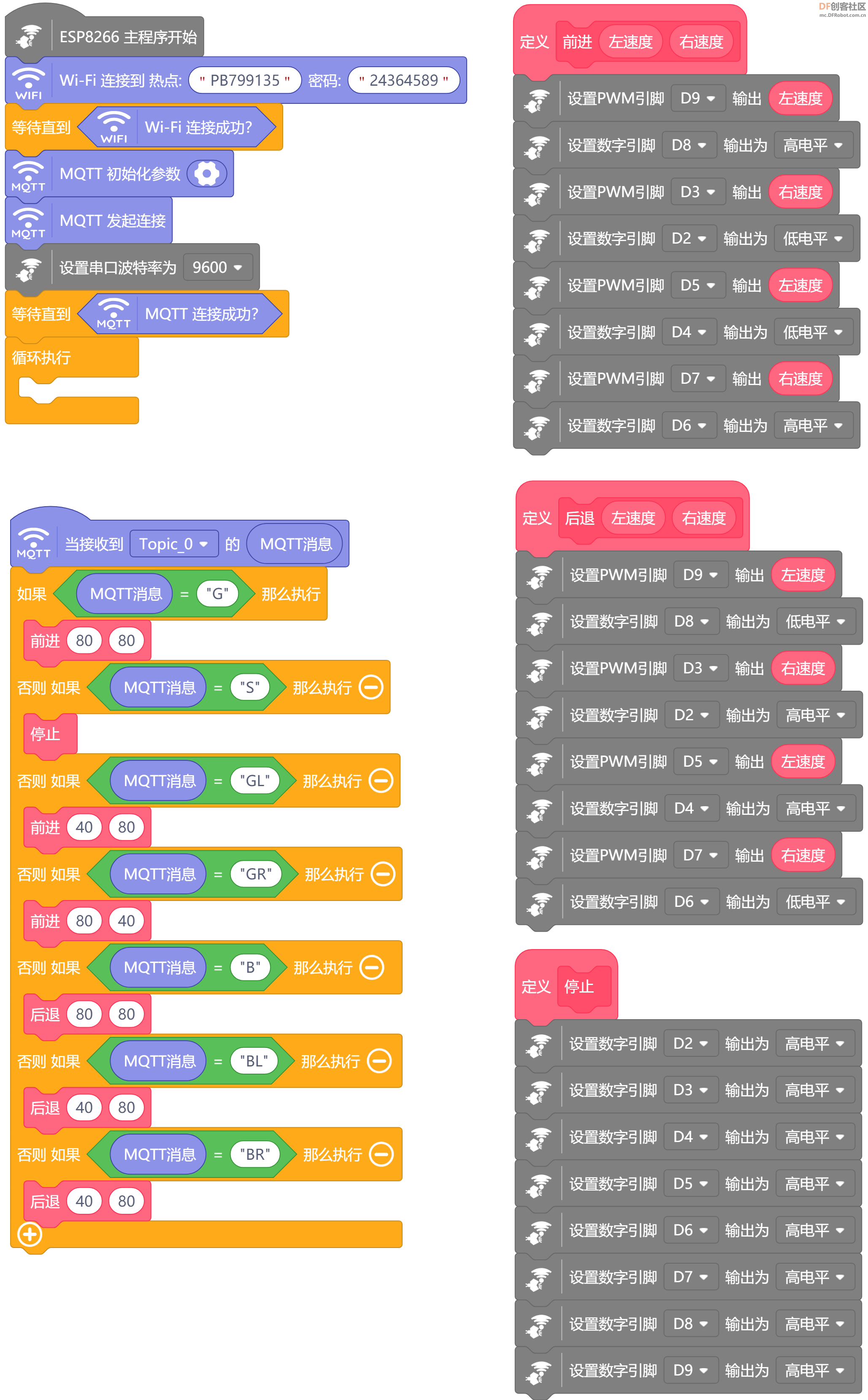 【行空板程序】 使用opencv库加载USB摄像头并在屏幕上显示,端口21、22接按钮实现控制开关。读取行空板内置加速度计X、Y值,根据阈值判断后,向物联网发送控制指令。 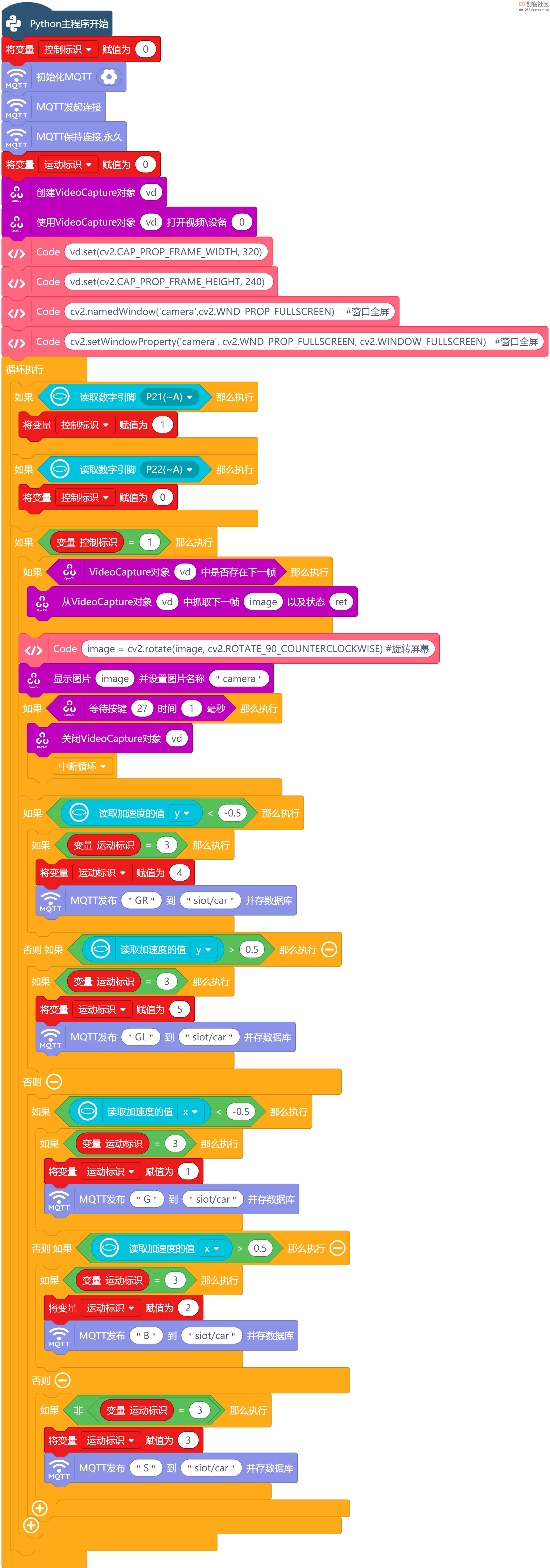 【演示视频】 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创客造
创客造
 编辑选择奖
编辑选择奖
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






