|
2152| 17
|
[项目] 【Arduino 动手做】构思超级棒的 Stair Bear 爬楼梯机器人 |
|
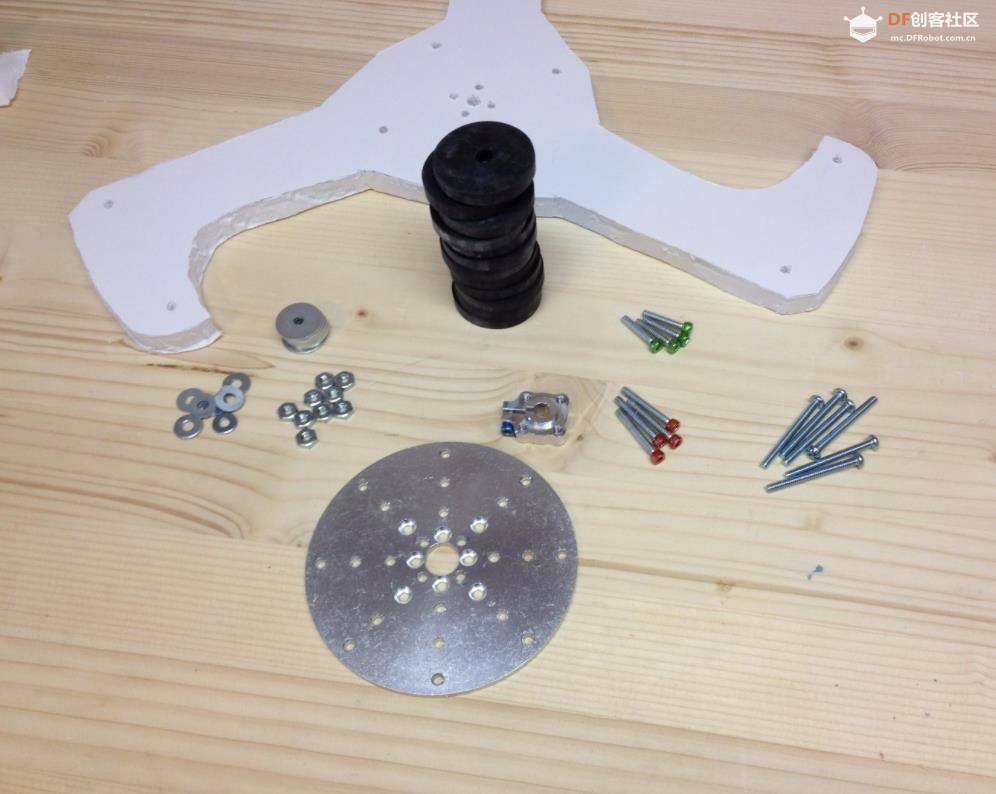
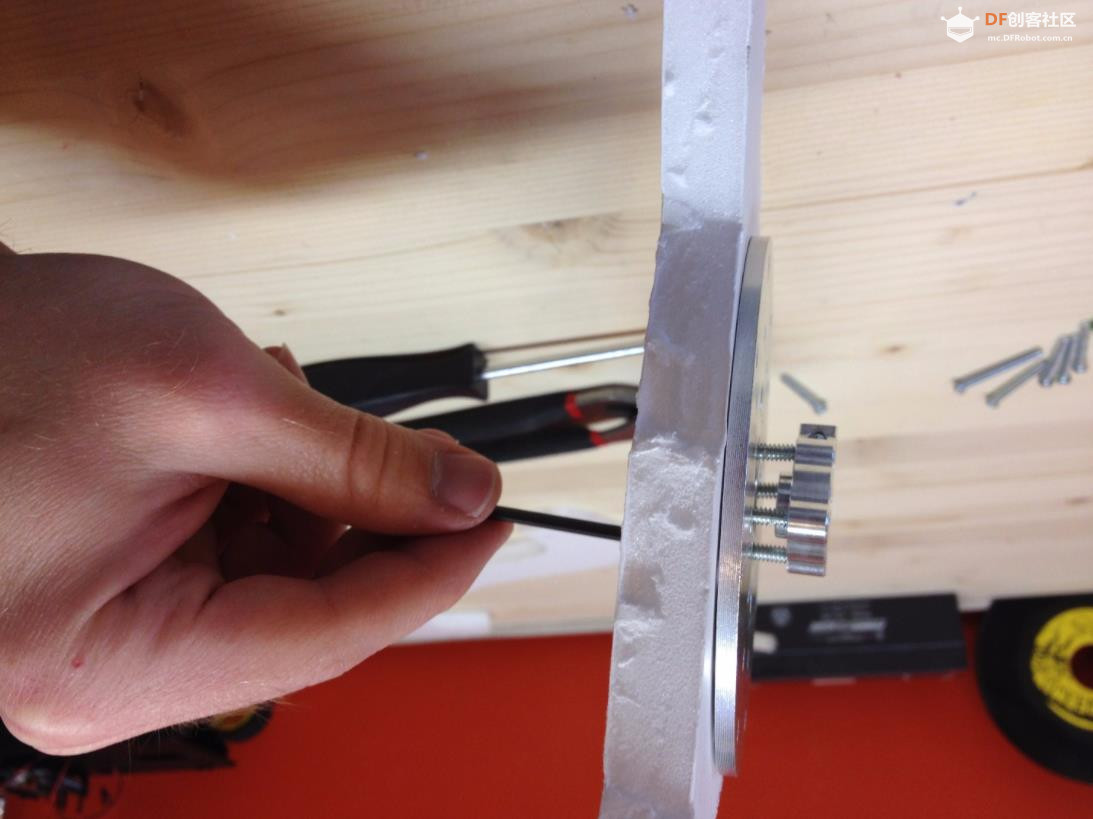
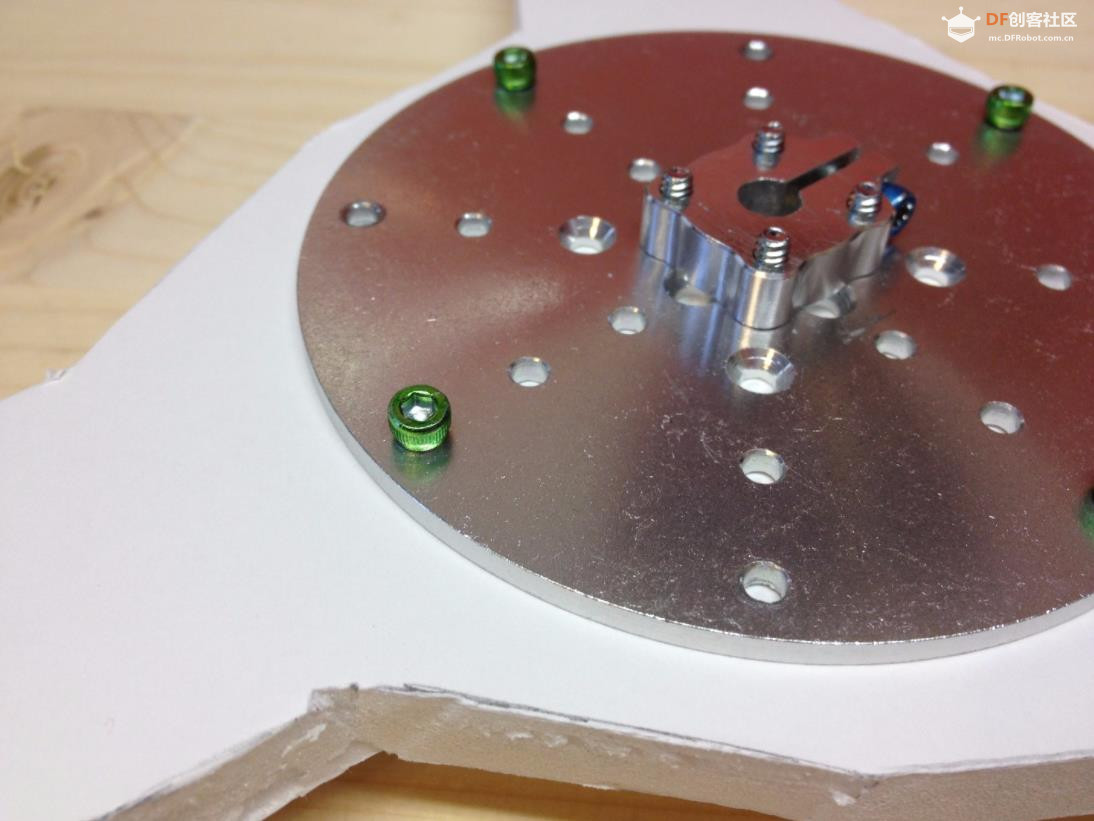
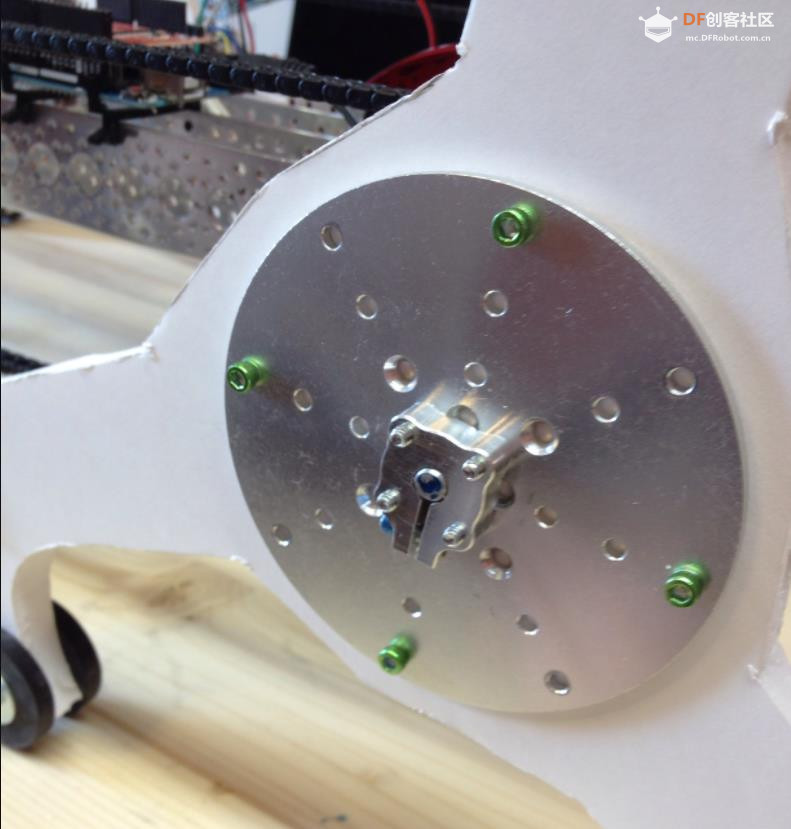
步骤 1:制作轮子模板 说实话……这个设计全靠轮子。如果能用3D打印机做的话,这绝对是个很棒的项目……可惜我们没有3D打印机,所以我们就用了老办法,用了Hobby Lobby买的1/2英寸厚的泡沫板。 第一步是制作模板: 1A) 下载PDF 1B)打印 1C)剪掉 1D) 用胶带粘在一起 1E) 打孔。 由于我使用了 Actobotics圆形底座 A,我抓取了 Servo City 的尺寸图并将其放入我的 Adobe Illustrator 文档中,以确保间距恰到好处。我选择在圆形底座上只使用 8 个孔……最内侧的 4 个用于轮毂,最外侧的 4 个用于车轮稳定性。 每条腿上的三个大圆圈是可选的。我的想法是,如果泡沫撑不住,我就试试木头,然后就需要减轻重量了。  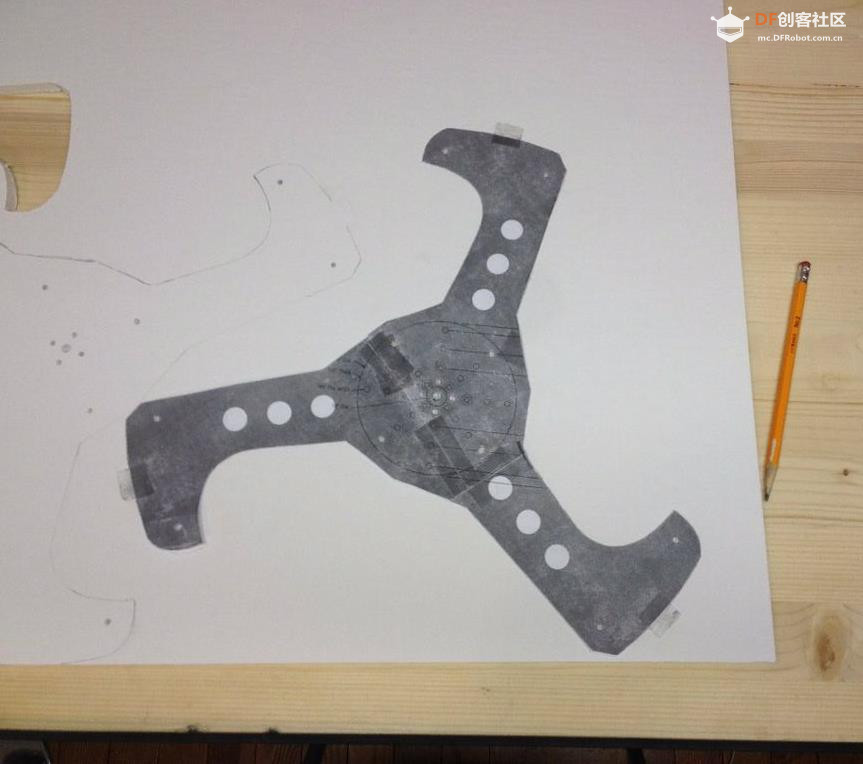  |
|
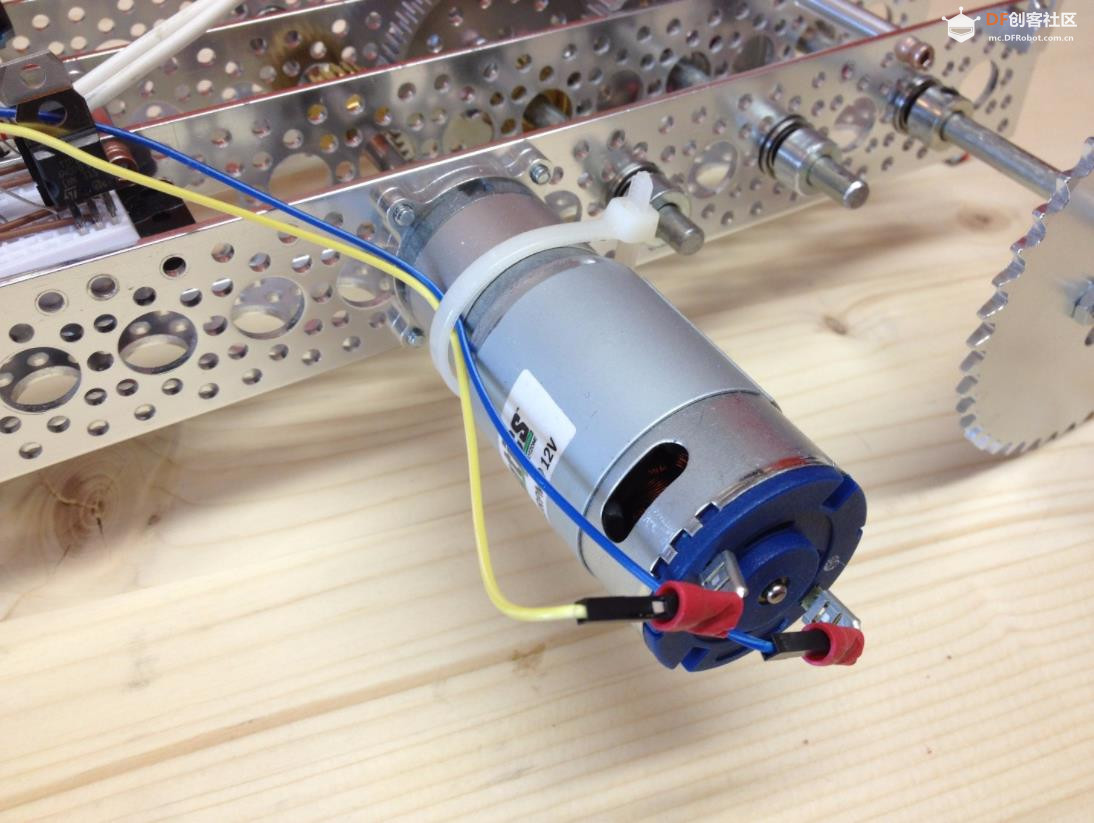
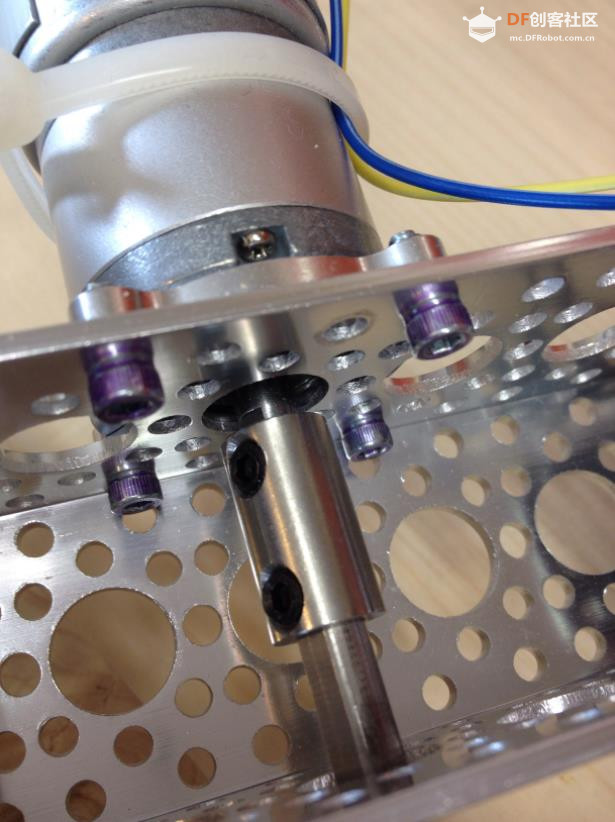
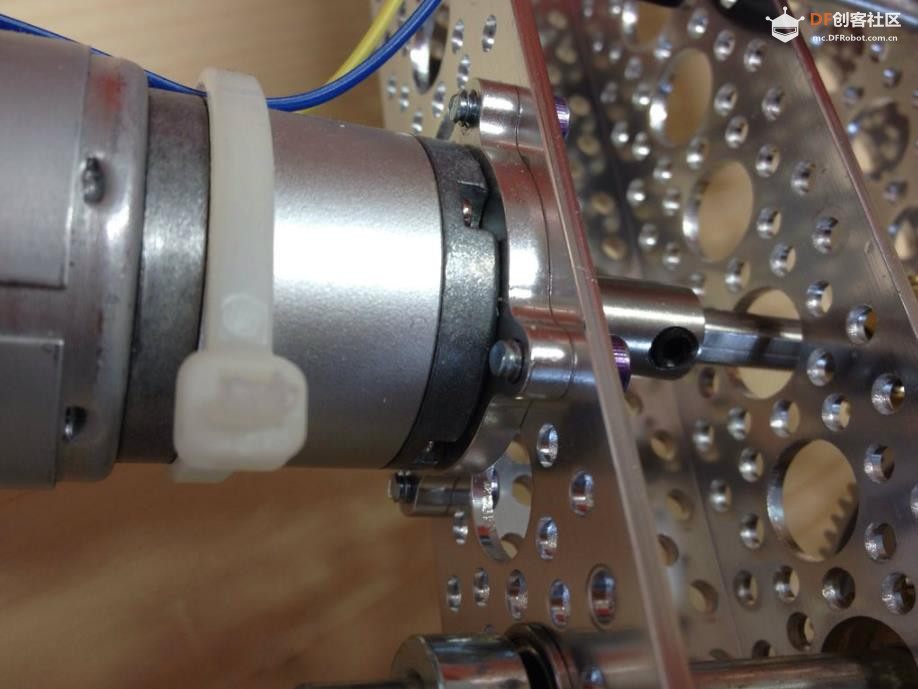
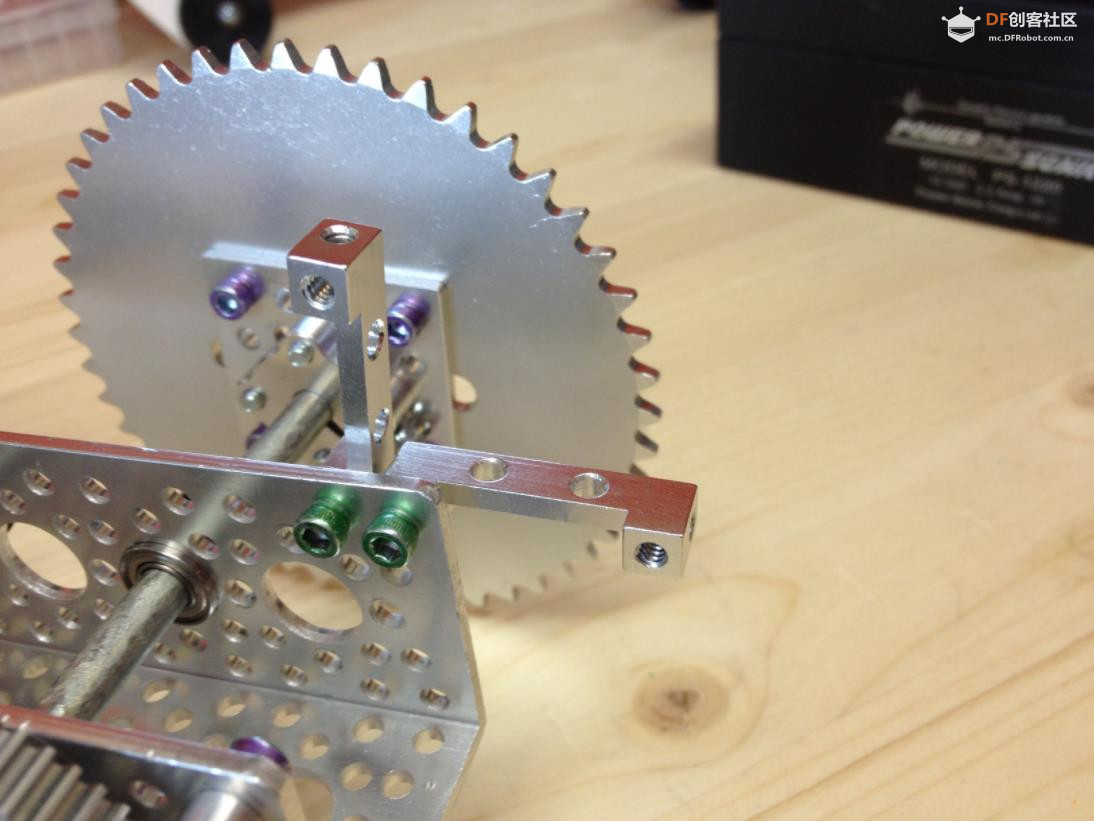
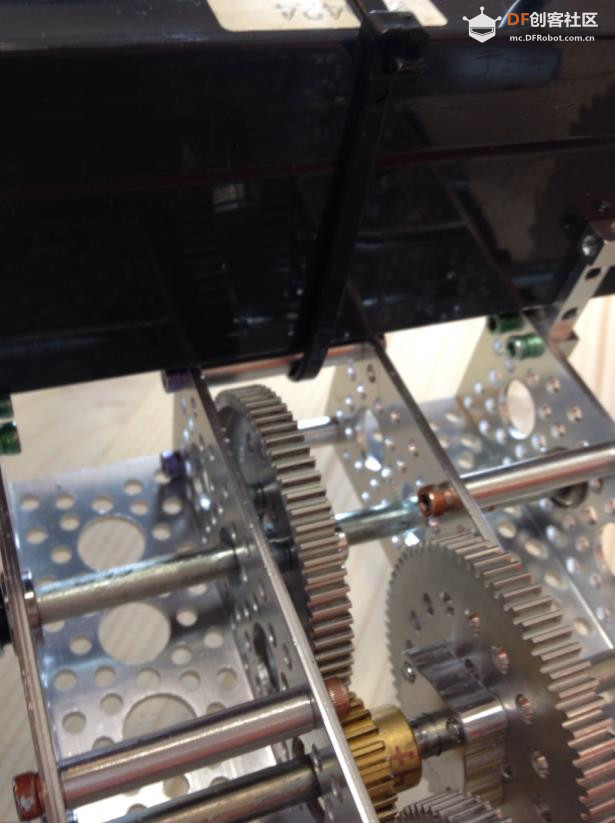
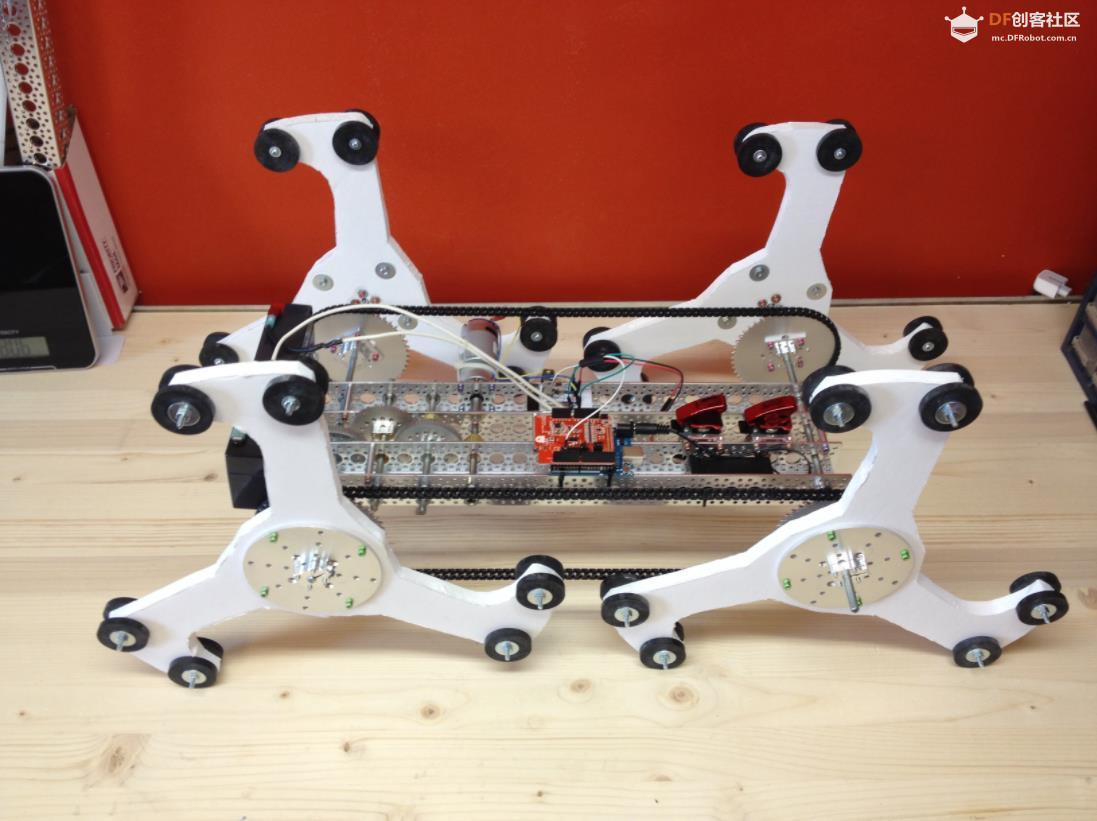
## 第六步:全部登上齿轮系 齿轮: 我用过: 三个 24 齿、32 节距、1/4 英寸孔径小齿轮 三个 72 齿、32 节距、1/2 英寸内径铝齿轮 这两个齿轮的传动比为3:1。它们被设计成在三个阶段中分别降低转速并增加扭矩,最终最大转速约为11.6 rpm。这是经过反复试验才得出的结论;您可能希望一开始就使用齿轮比更低的电机。 选择您的轴系: 我使用了 Servo City 的一些精密钢 1/4 英寸 D 轴,但也发现必要时可以使用 Mendards 的一些 1/4 英寸“PLAT STL - ROUND”——我尝试了 1/4 英寸铝棒和 1/4 英寸可焊钢棒,但它们都太粗了一点。使用 D 轴和五金店的钢棒各有利弊;主要是在使用固定螺钉轮毂时 D 形非常有用 - 然而我发现 Servo City 的精密钢 1/4 英寸 D 轴很难操作,因为配合太紧了......装卸任何东西都很费劲。五金店的钢棒稍微细一点,因此更容易操作——但由于没有平面,它们会被承受很大力的固定螺钉严重损坏。 您需要的轴: 14 英寸轴(x2)——一个暂时用于前部,稍后您将需要另一个用于后部。ServoCity 最大的 D 轴是 12 英寸,因此您可以使用 Menards 钢棒,或者使用 1/4 英寸 - 1/4 英寸的轴联轴器来连接两个 7 英寸的 D 轴。 6 英寸轴(x2) 4.5 英寸轴(这是连接到电机轴上的联轴器的轴) 轴系提示: 如果你用的是Menards的钢棒,切割好长度后,把边缘斜角处理一下(我用的是电磨),这样更容易安装零件。以后你会感谢我的。其实,你的Precision D-Shaft也一样! 无论您使用哪种轴,都要准备好一把小细锉刀来锉掉损坏的斑点……特别是当您使用固定螺钉轮毂时。 对于卡在轴上的物品: 最有效的拆卸方法是使用虎钳并将轴垂直向下敲击。 我还发现,用一把鲤鱼钳(配一根粗橡皮筋或一小段绳子以减少划伤)搭配一把平头螺丝刀通常也很有效。如果你无法或不想为了拆开一个卡住的齿轮而拆开整个组件……或者孩子正在睡觉,你必须安静地工作,这种方法尤其有用。 选择您的中心: 我最终用了固定螺钉轮毂来固定齿轮,用夹紧轮毂来固定车轮。如果不使用D型轴,夹紧轮毂的拆卸和调整会容易得多。然而,由于它的设计方式会在拧紧时将4个螺钉中的两个拉在一起——我不想给齿轮系带来任何可能的变形或错位。 其他: 当然,您还需要一些 1/4 英寸法兰滚珠轴承 ( 535198 )、一些1/4 英寸紧定螺钉环和一些1/4 英寸轴垫片以及用于较大齿轮的紧定螺钉轮毂。  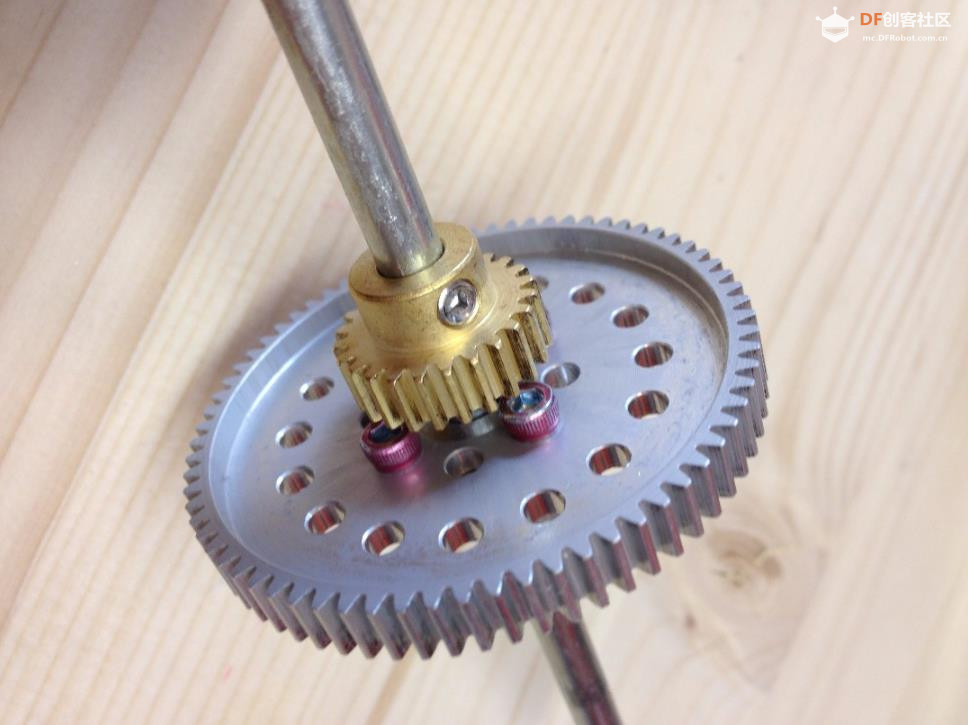 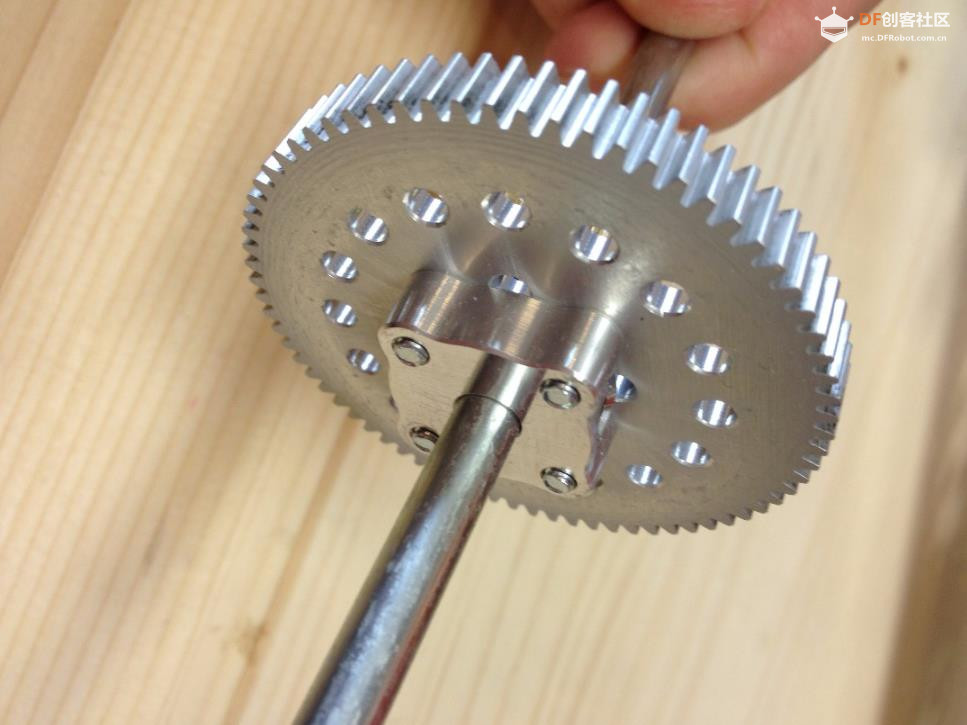 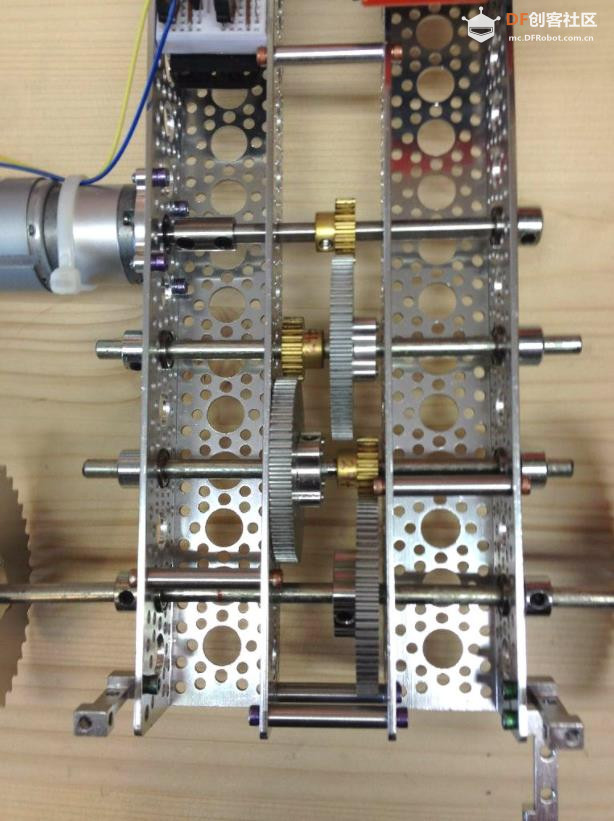  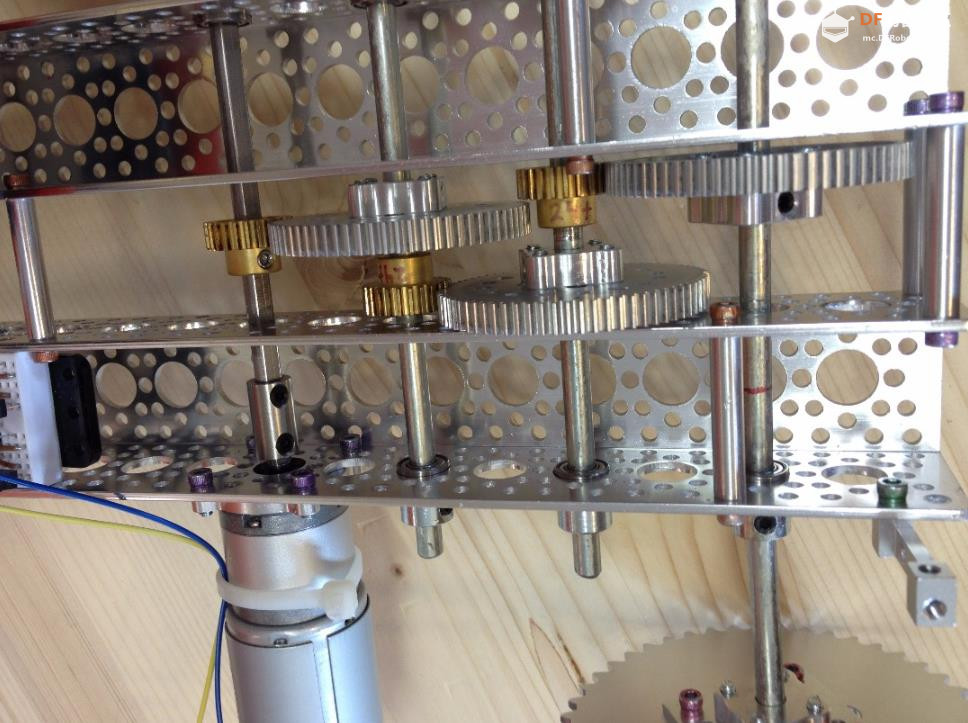 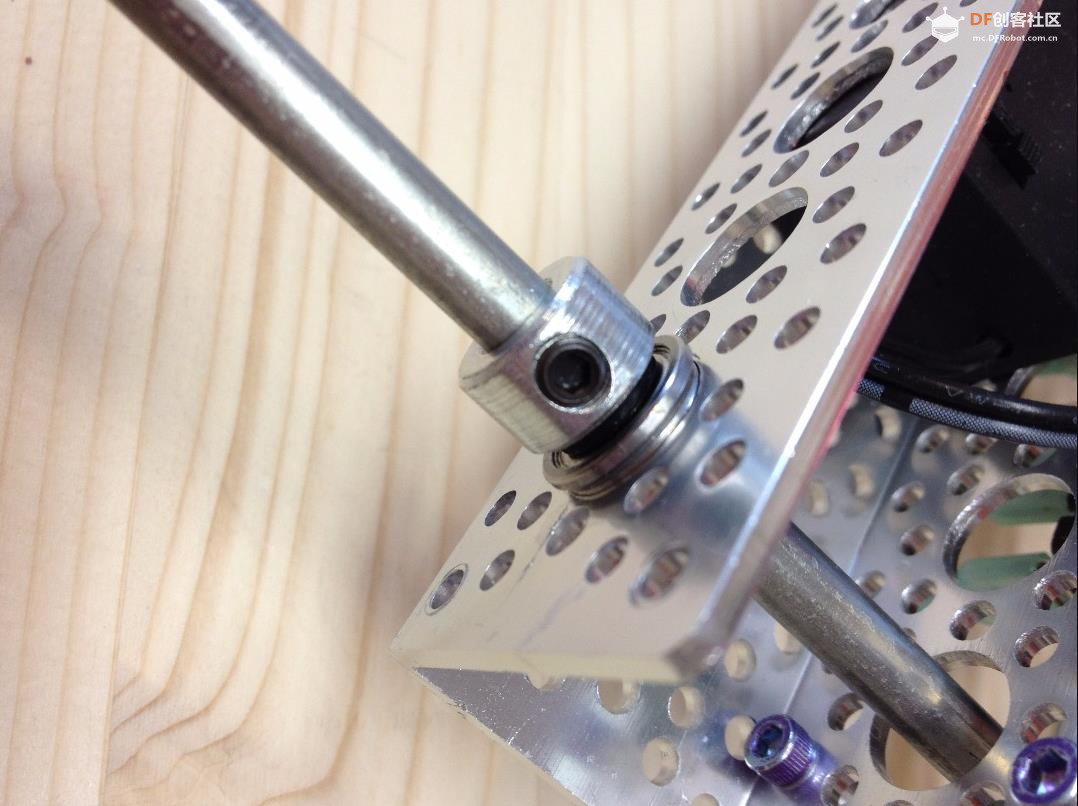  |
|
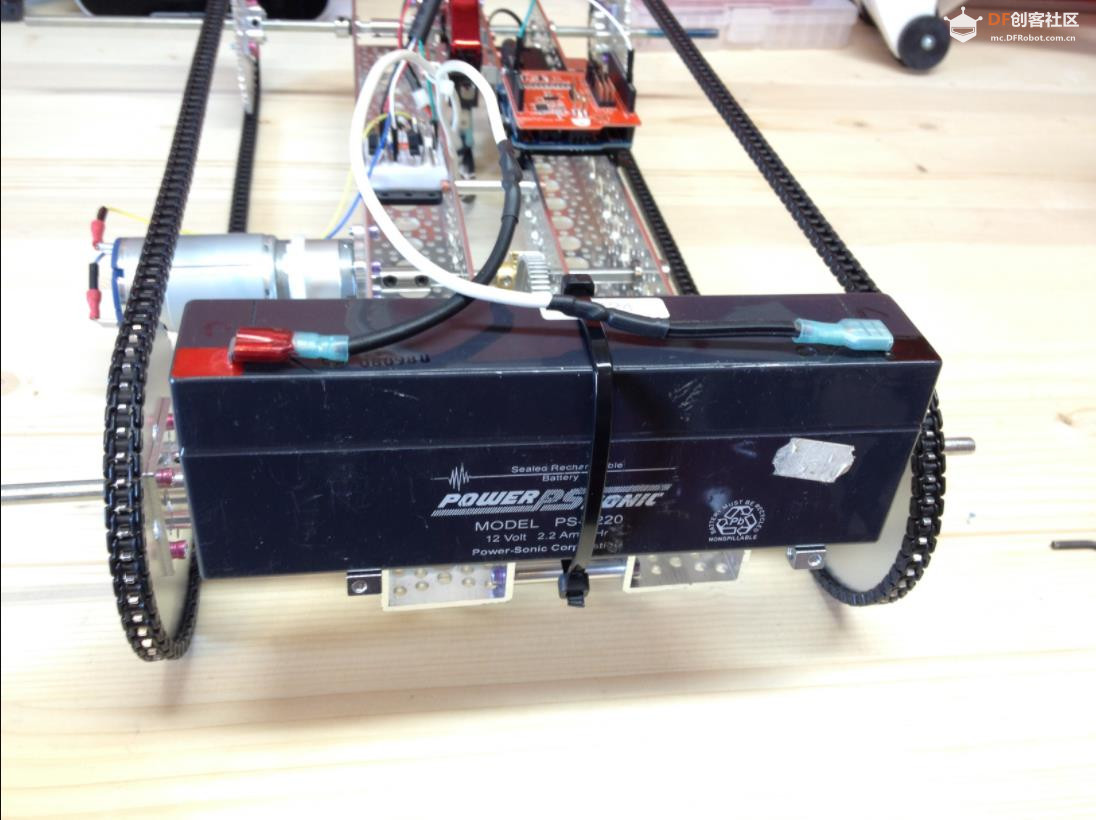
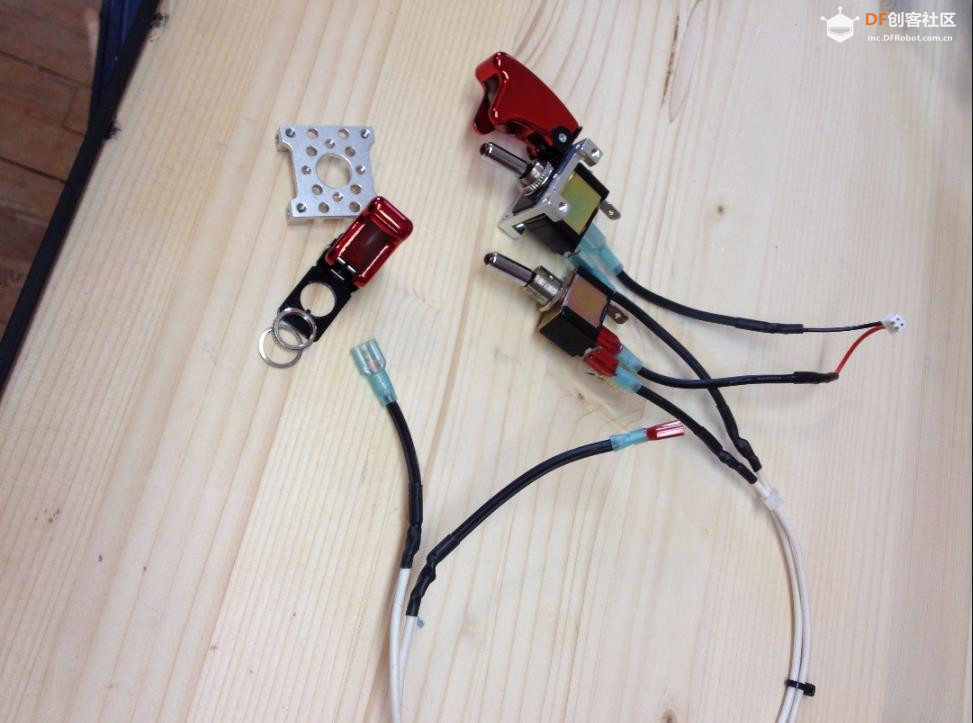
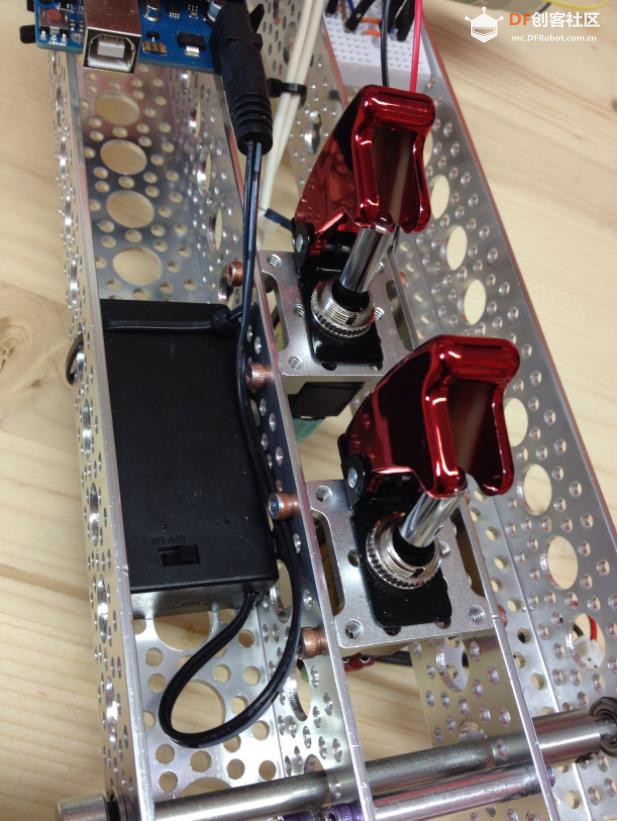
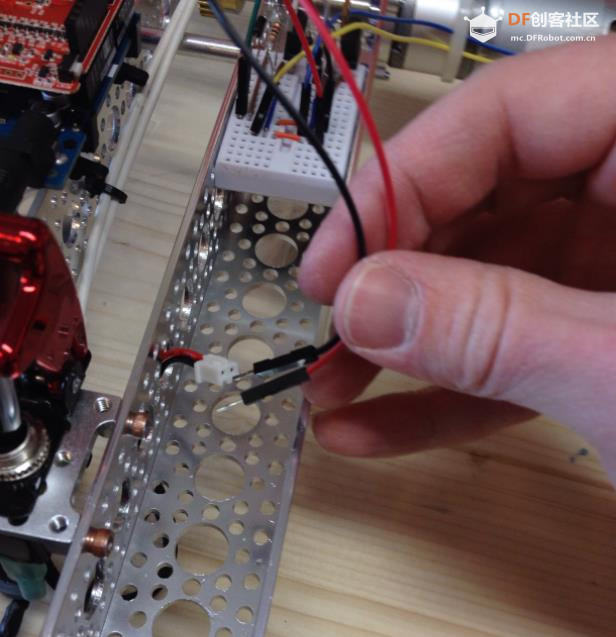
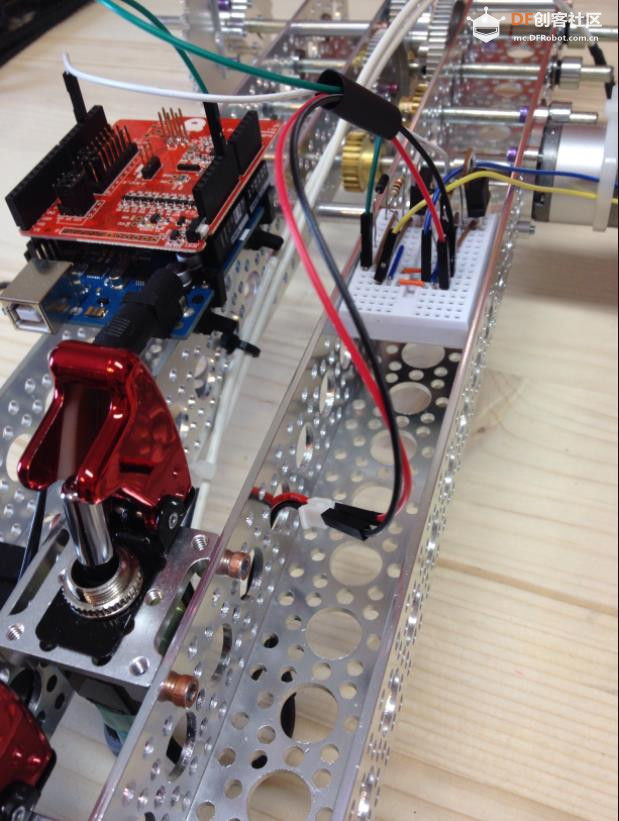
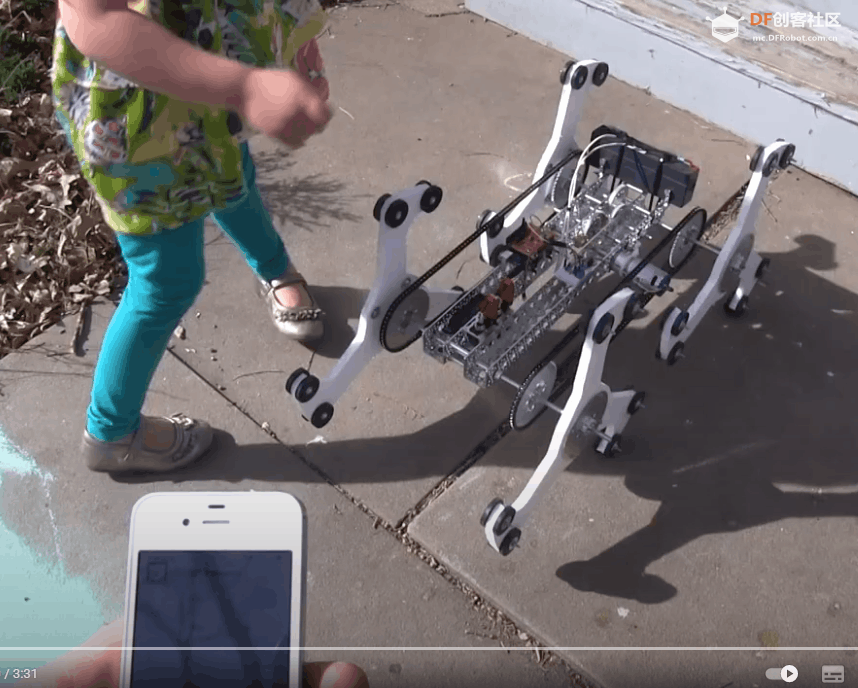
## 第 9 步:控制大脑! Arduino 我使用了一个 Arduino Uno(通过Arduino 通道卡扣式安装座连接)和一个BLE 扩展板来添加蓝牙功能。Arduino Uno 由一个 9V 电池供电,电池盒里有一个带开关的电池,我用拉链固定住,以防止电池滑动。 BLE Shield 我使用了 Red Bear Labs 的 BLE Shield。您可以查看他们的入门文档。我将 BLEControllerSketch 从他们的库中加载到 arduino 上,然后在我的 iPhone 上安装了他们的免费应用程序(他们也有安卓应用程序)。 首次运行 iPhone 应用时,您需要进入菜单并选择“BLE 控制器”。我敢肯定,第一次运行它时,它直接进入了“简单聊天”应用,这有点让人摸不着头脑。然后,您需要确保您的 arduino 已打开电源,然后在应用中扫描它。之后,您只需选择“连接上次连接”。接下来,选择您的引脚(我使用了 3 号引脚,因为它支持脉冲宽度调制)。 PWM电路 我基本上用这个 Instructable上的电路来做脉冲宽度调制电路。没错,这些说明是关于如何打开和关闭螺线管的,但只需用电机代替螺线管,发送 PWM 信号而不是高/低电平,就能很好地控制电机转速。简单、便宜、有效。 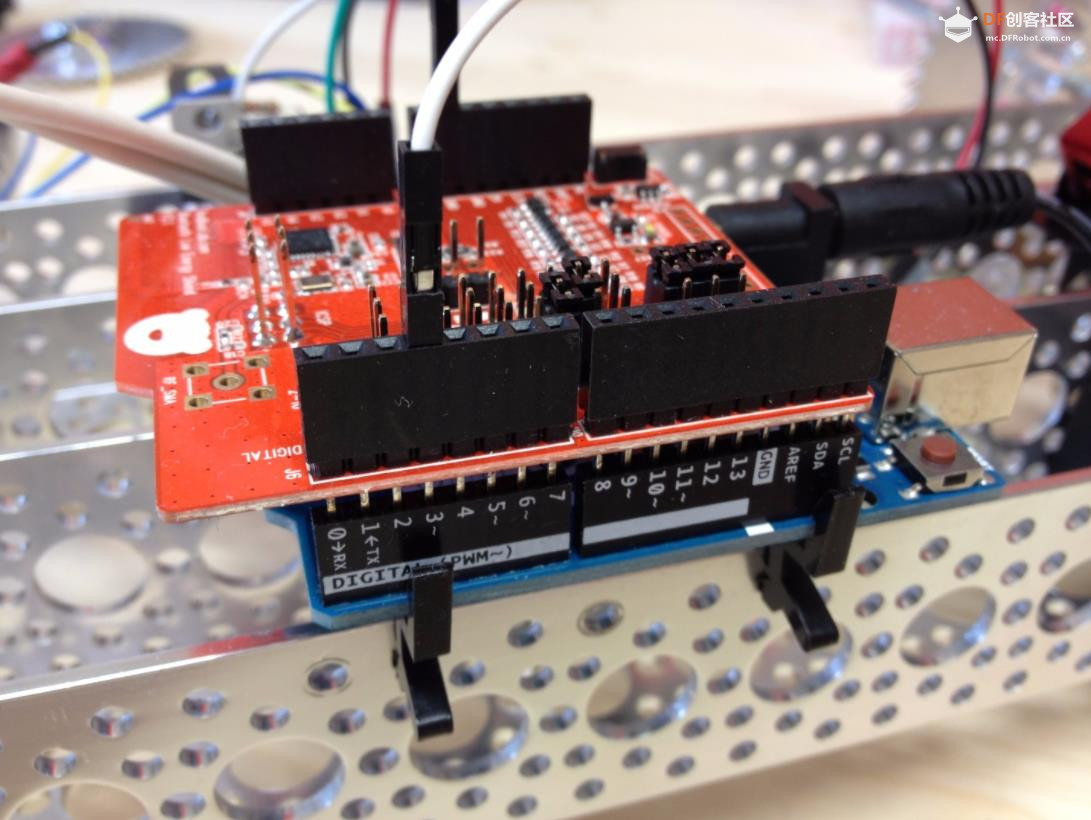 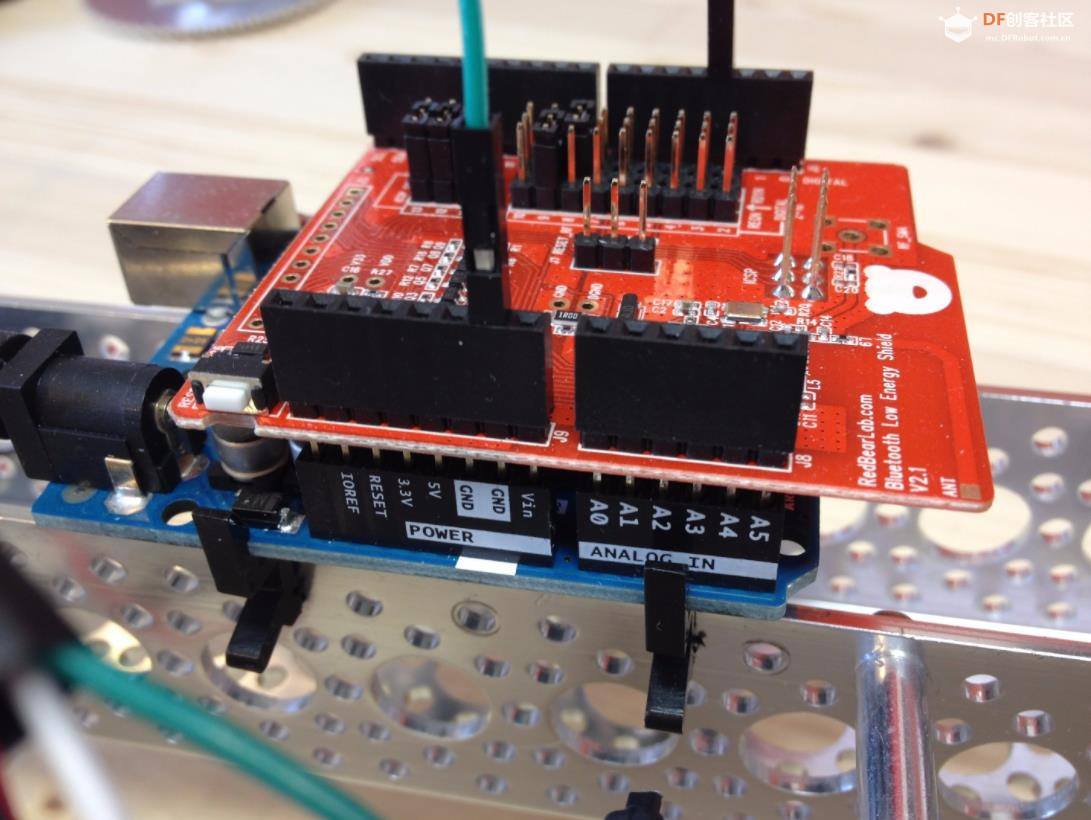 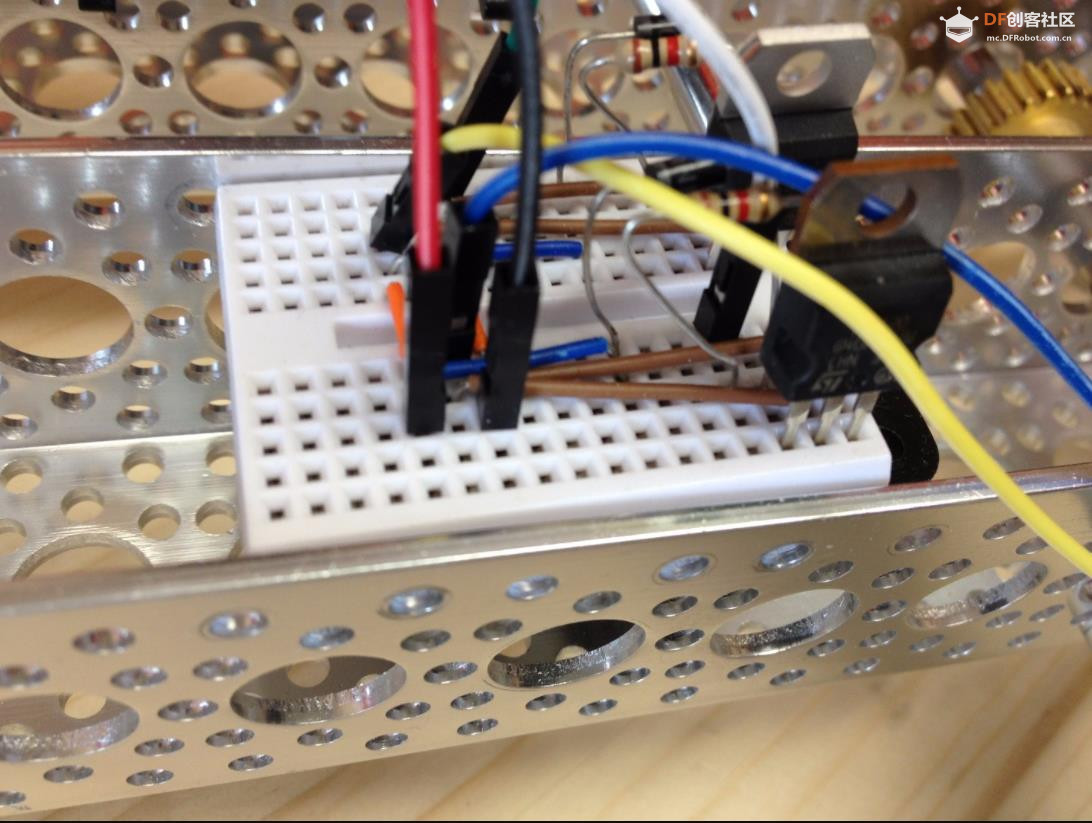 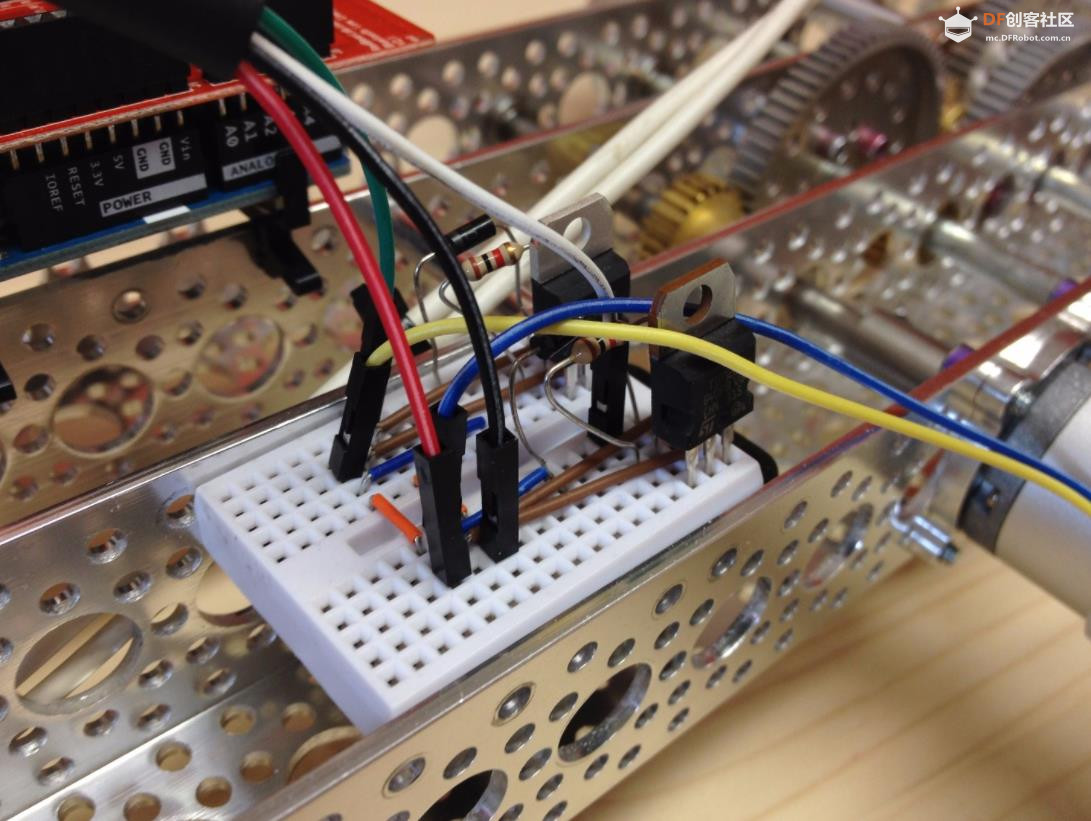 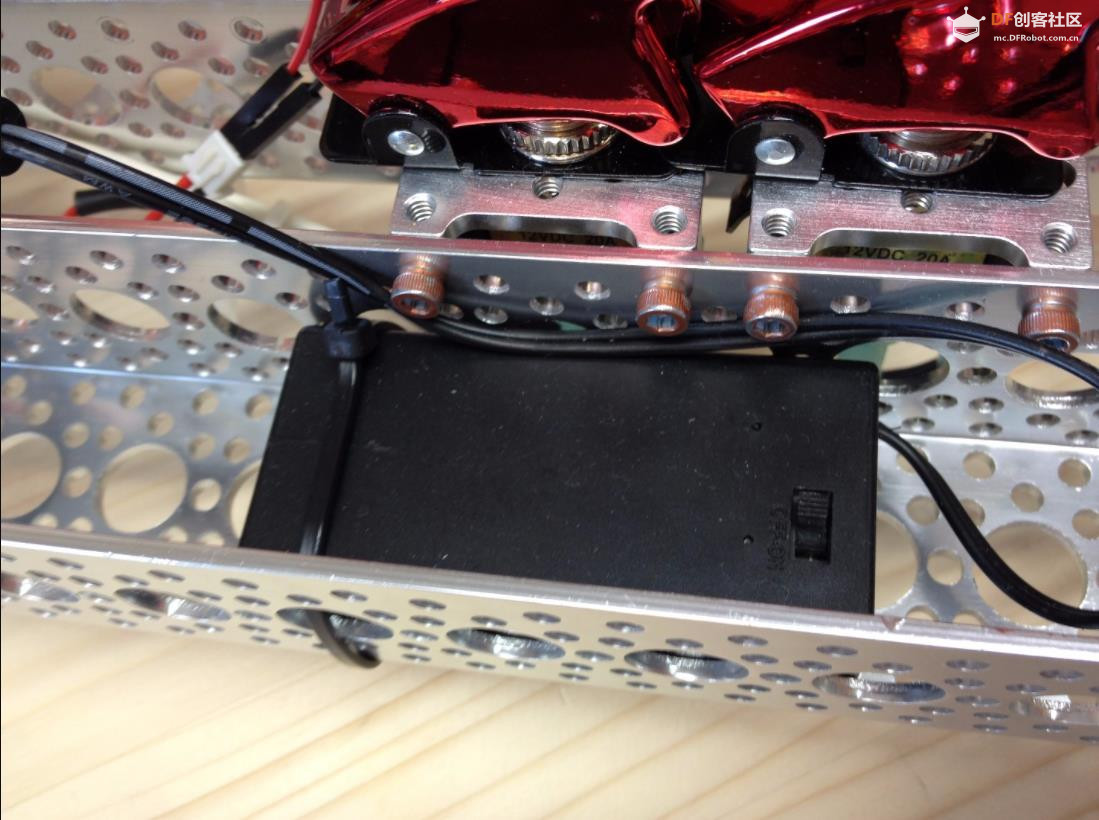  |
|
【Arduino 动手做】构思超级棒的 Stair Bear 爬楼梯机器人 项目链接:https://www.instructables.com/Stair-Climbing-Robot-1/ 项目作者:美国堪萨斯州温菲尔德市 RobotZone(TeamJaeger) (我在堪萨斯州温菲尔德的 RobotZone(Actobotics 和 ServoCity.com 的幕后推手)工作。我喜欢和孩子们一起做项目,看看他们创作出什么。) 项目视频: https://www.youtube.com/watch?v=JD1Su34tI_Q https://www.youtube.com/watch?v=cC5zpgA0tgE 项目参考:https://www.arduino.cc/ https://playground.arduino.cc/up ... solenoid_driver.pdf 模版文件:https://content.instructables.co ... F4RMPN3I81V1JSR.pdf    |

1.21 MB, 下载次数: 4979
本帖最后由 驴友花雕 于 2025-6-8 15:23 编辑    附录 项目链接:https://www.instructables.com/Stair-Climbing-Robot-1/ 项目作者:RobotZone(TeamJaeger) 项目视频: https://www.youtube.com/watch?v=JD1Su34tI_Q https://www.youtube.com/watch?v=cC5zpgA0tgE 项目参考:https://www.arduino.cc/ https://playground.arduino.cc/up ... solenoid_driver.pdf 模版文件:https://content.instructables.co ... F4RMPN3I81V1JSR.pdf |
|
补充: 这是我们参加SparkFun+Actobotics爬楼挑战赛的作品。以下是所用材料:
|



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶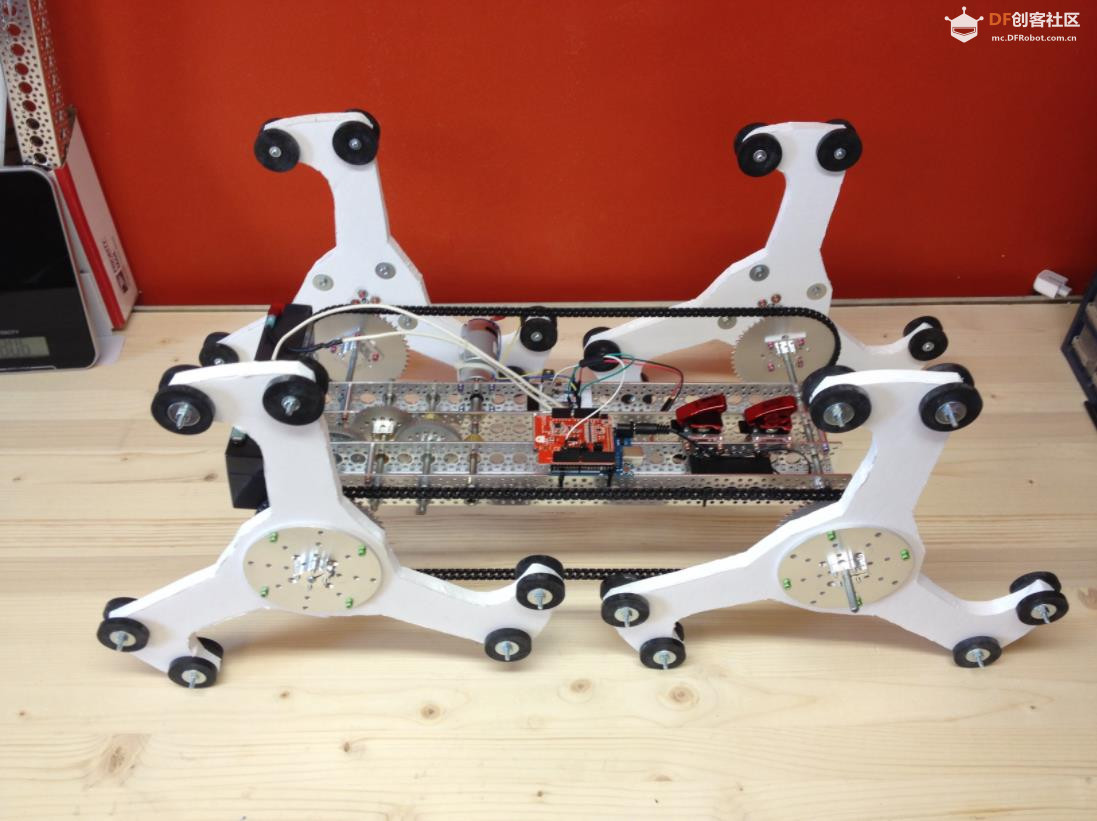





























 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






