|
1344| 2
|
[项目] 【Arduino 动手做】产生 15 种不同运动效果的无用盒子 |
|
本帖最后由 驴友花雕 于 2025-6-13 08:06 编辑 一台按下开关的无用机器。它会自行关闭,并产生 15 种不同的运动效果。 又一个没用的盒子。我在网上看到它,就决定自己做一个。做起来和玩起来都很有趣。 旧代码很容易找到,但有一些对我来说有用的小改进。非常感谢编写代码的人,他真的懂乐趣。这是我画的几张图。虽然构造完全可以自定义,但我还是把它们贴出来给感兴趣的人看,因为我找不到类似的入门资料。 电路图也根据我的喜好做了一些调整。我选择使用 USB 电源(手机充电器或移动电源),而不是电池,而是通过一个二极管连接到 5V 引脚。这样可以防止在将开发板插入计算机 USB 进行编程时伺服电机通电,因为电流消耗过高。 电气图 电路图根据我的喜好做了一些调整。我选择使用 USB 电源(手机充电器或移动电源),而不是电池,而是通过一个二极管连接到 5V 引脚。这样可以防止在将开发板插入计算机 USB 进行编程时伺服电机通电,因为电流消耗过高。 也适用于 UNO,无需任何改动。 上传时只需在 Arduino 编辑器中选择合适的开发板即可。 旧代码很容易找到,但有一些对我来说有用的小改进。非常感谢编写代码的人,他真的很有趣。 在 YouTube 上发表评论或给我发送电子邮件(YO3RAK at gmail.com )以获取更多信息,因为该平台不会通知我新的评论。  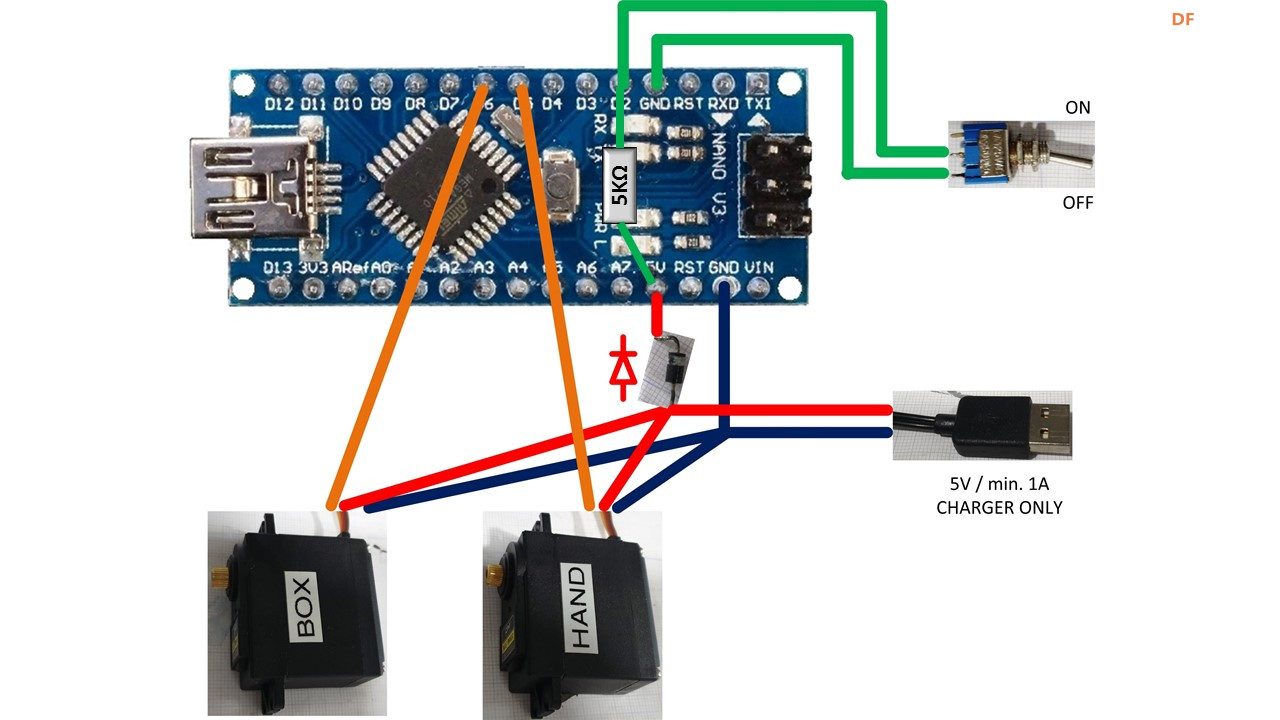 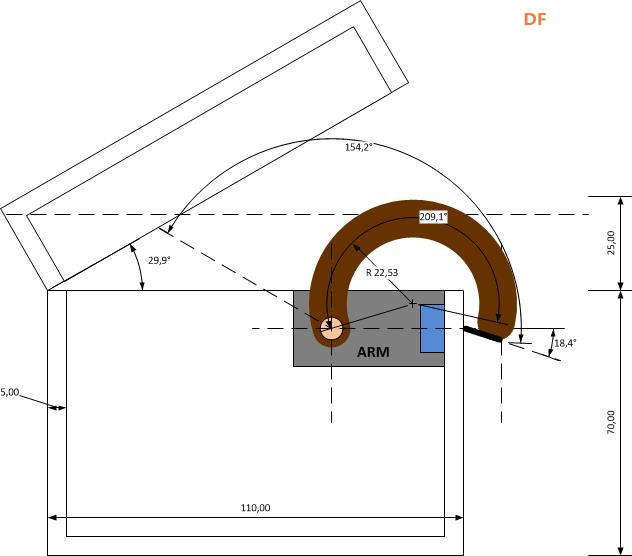 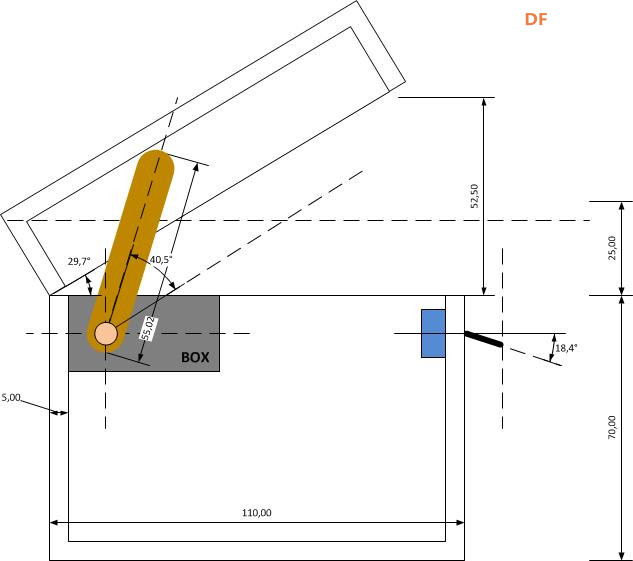  |
项目代码 |
|
附录 【Arduino 动手做】它会自行关闭并产生 15 种不同运动效果的无用盒子 项目链接:https://www.hackster.io/viorelra ... with-arduino-d67b47 项目作者:维奥雷尔拉科维泰亚努 项目视频 :https://www.youtube.com/watch?v=QCohS-ENN_Q 项目代码:https://www.hackster.io/code_files/463257/download  |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






