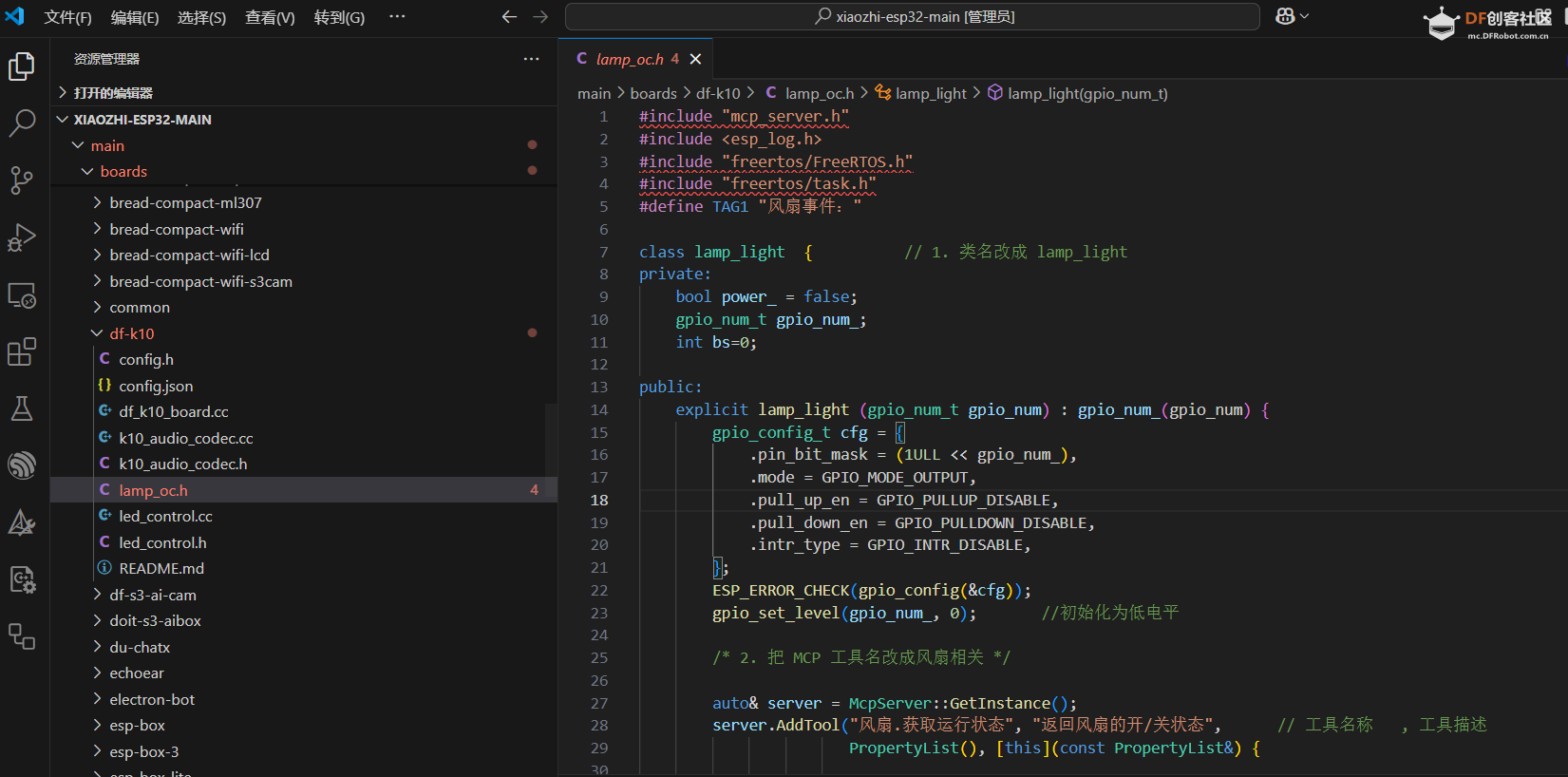
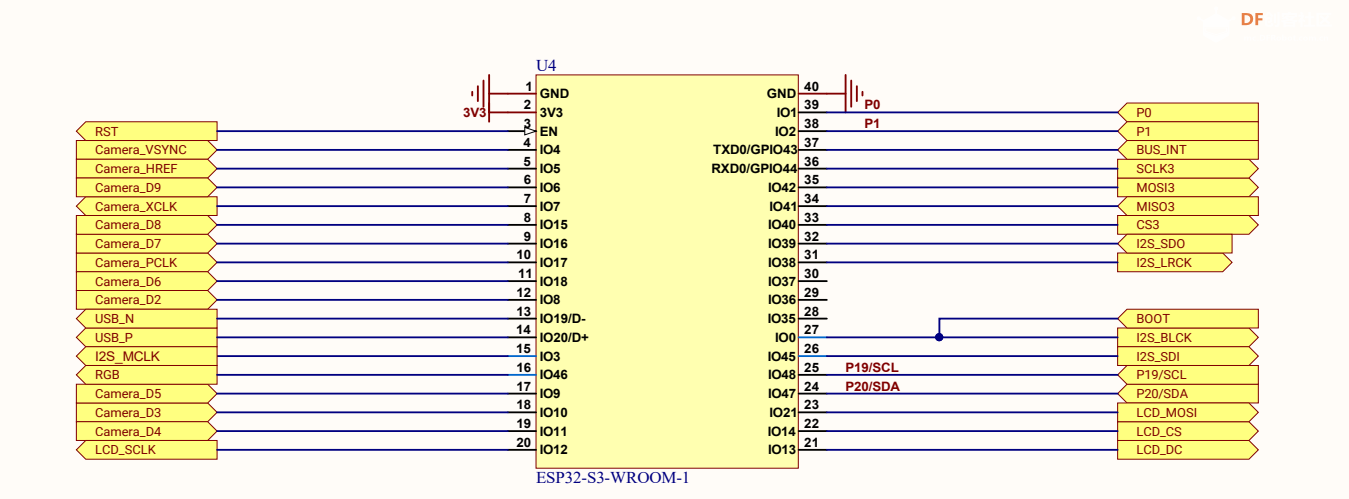
本帖最后由 云天 于 2025-9-1 13:24 编辑 【项目背景】 随着智能家居概念的普及,越来越多的家庭开始尝试将各种设备接入智能控制系统。行空板 K10 是一款功能强大的开发板,它集成了 ESP32 芯片,具备强大的网络连接能力和丰富的 GPIO 接口,非常适合用于开发智能硬件项目。ESP-IDF 是 ESP32 官方的开发框架,提供了底层硬件操作和网络通信的全面支持,能够帮助开发者高效地实现各种功能。 【硬件准备】 行空板 K10 :作为主控制器,负责运行程序和处理各种指令。电磁继电器模块 :用于控制风扇的开关,连接到行空板的 P0 引脚。LED 灯带 :连接到行空板的 P1 引脚,用于实现各种灯光效果。风扇(微动开关) :通过电磁继电器连接到行空板,实现远程控制。电源适配器 :为风扇和 LED 灯带提供稳定的电源。连接线 :用于连接各个模块。【软件环境】 Visual Studio Code :一个轻量级但功能强大的代码编辑器,支持 ESP-IDF 开发。ESP-IDF :ESP32 的官方开发框架,提供底层硬件操作和网络通信功能。MCP Server :一个用于设备控制和通信的轻量级服务器框架,方便实现远程控制功能。小智AI终端控制GPIO[简单教程] ,完成代码修改。【功能实现 风扇控制】 风扇的控制通过电磁继电器实现。我们定义了一个 lamp_light 类来封装风扇的控制逻辑。通过 MCP Server 提供的接口,可以远程获取风扇的运行状态、打开、关闭以及调节速度。 获取风扇状态 :通过 风扇.获取运行状态 接口,返回风扇的当前开/关状态。打开风扇 :通过 风扇.打开 接口,控制电磁继电器闭合,启动风扇。关闭风扇 :通过 风扇.关闭 接口,控制电磁继电器断开,停止风扇。提速一档 :通过 风扇.提速一档 接口,模拟风扇速度调节功能。#include "mcp_server.h"
#include <esp_log.h>
#include "freertos/FreeRTOS.h"
#include "freertos/task.h"
#define TAG1 "风扇事件:"
class lamp_light { // 1. 类名改成 lamp_light
private:
bool power_ = false;
gpio_num_t gpio_num_;
int bs=0;
public:
explicit lamp_light (gpio_num_t gpio_num) : gpio_num_(gpio_num) {
gpio_config_t cfg = {
.pin_bit_mask = (1ULL << gpio_num_),
.mode = GPIO_MODE_OUTPUT,
.pull_up_en = GPIO_PULLUP_DISABLE,
.pull_down_en = GPIO_PULLDOWN_DISABLE,
.intr_type = GPIO_INTR_DISABLE,
};
ESP_ERROR_CHECK(gpio_config(&cfg));
gpio_set_level(gpio_num_, 0); //初始化为低电平
/* 2. 把 MCP 工具名改成风扇相关 */
auto& server = McpServer::GetInstance();
server.AddTool("风扇.获取运行状态", "返回风扇的开/关状态", // 工具名称 , 工具描述
PropertyList(), [this](const PropertyList&) {
ESP_LOGW(TAG1, "获取到了风扇的当前状态,当前状态为%s", power_ ? "开" : "关"); //日志记录
return power_ ? "{"运行状态:":风扇是开着的!}" : "{"运行状态:":风扇是关着的!}"; //返回状态
});
server.AddTool("风扇.打开", "打开风扇", // 工具名称 , 工具描述
PropertyList(), [this](const PropertyList&) {
if(bs==0){
power_ = true;
gpio_set_level(gpio_num_, 1); //设置为高电平
// 等待0.2秒
vTaskDelay(0.2 / portTICK_PERIOD_MS * 1000);
gpio_set_level(gpio_num_, 0); //设置为低电平
bs=1;
ESP_LOGW(TAG1, "已打开风扇!"); //日志记录
return true; //返回告诉小智执行成功!
}
else{
return false; //返回告诉小智执行不成功!
}
});
server.AddTool("风扇.关闭", "关闭风扇", // 工具名称 , 工具描述
PropertyList(), [this](const PropertyList&) {
if(bs!=0){
power_ = false;
switch(bs){
case 1:gpio_set_level(gpio_num_, 1); //设置为高电平
// 等待0.2秒
vTaskDelay(0.2 / portTICK_PERIOD_MS * 1000);
gpio_set_level(gpio_num_, 0); //设置为低电平
vTaskDelay(0.2 / portTICK_PERIOD_MS * 1000);
gpio_set_level(gpio_num_, 1); //设置为高电平
// 等待0.2秒
vTaskDelay(0.2 / portTICK_PERIOD_MS * 1000);
gpio_set_level(gpio_num_, 0); //设置为低电平
vTaskDelay(0.2 / portTICK_PERIOD_MS * 1000);
gpio_set_level(gpio_num_, 1); //设置为高电平
// 等待0.2秒
vTaskDelay(0.2 / portTICK_PERIOD_MS * 1000);
gpio_set_level(gpio_num_, 0); //设置为低电平
break;
case 2:gpio_set_level(gpio_num_, 1); //设置为高电平
// 等待0.2秒
vTaskDelay(0.2 / portTICK_PERIOD_MS * 1000);
gpio_set_level(gpio_num_, 0); //设置为低电平
vTaskDelay(0.2 / portTICK_PERIOD_MS * 1000);
gpio_set_level(gpio_num_, 1); //设置为高电平
// 等待0.2秒
vTaskDelay(0.2 / portTICK_PERIOD_MS * 1000);
gpio_set_level(gpio_num_, 0); //设置为低电平
break;
case 3:gpio_set_level(gpio_num_, 1); //设置为高电平
// 等待0.2秒
vTaskDelay(0.2 / portTICK_PERIOD_MS * 1000);
gpio_set_level(gpio_num_, 0); //设置为低电平
break;
}
bs=0;
ESP_LOGW(TAG1, "已关闭风扇!"); //日志记录
return true; //返回告诉小智执行成功!
}
else{
return false; //返回告诉小智执行不成功!
}
});
server.AddTool("风扇.提速一档", "提速一档", // 工具名称 , 工具描述
PropertyList(), [this](const PropertyList&) {
power_ = false;
if(bs!=0 && bs!=3 ){
gpio_set_level(gpio_num_, 1); //设置为高电平
// 等待0.2秒
vTaskDelay(0.2 / portTICK_PERIOD_MS * 1000);
gpio_set_level(gpio_num_, 0); //设置为低电平
ESP_LOGW(TAG1, "已提速一档!"); //日志记录
bs++;
return true; //返回告诉小智执行成功!
}
else{
return false; //返回告诉小智执行不成功!
}
});
}
};
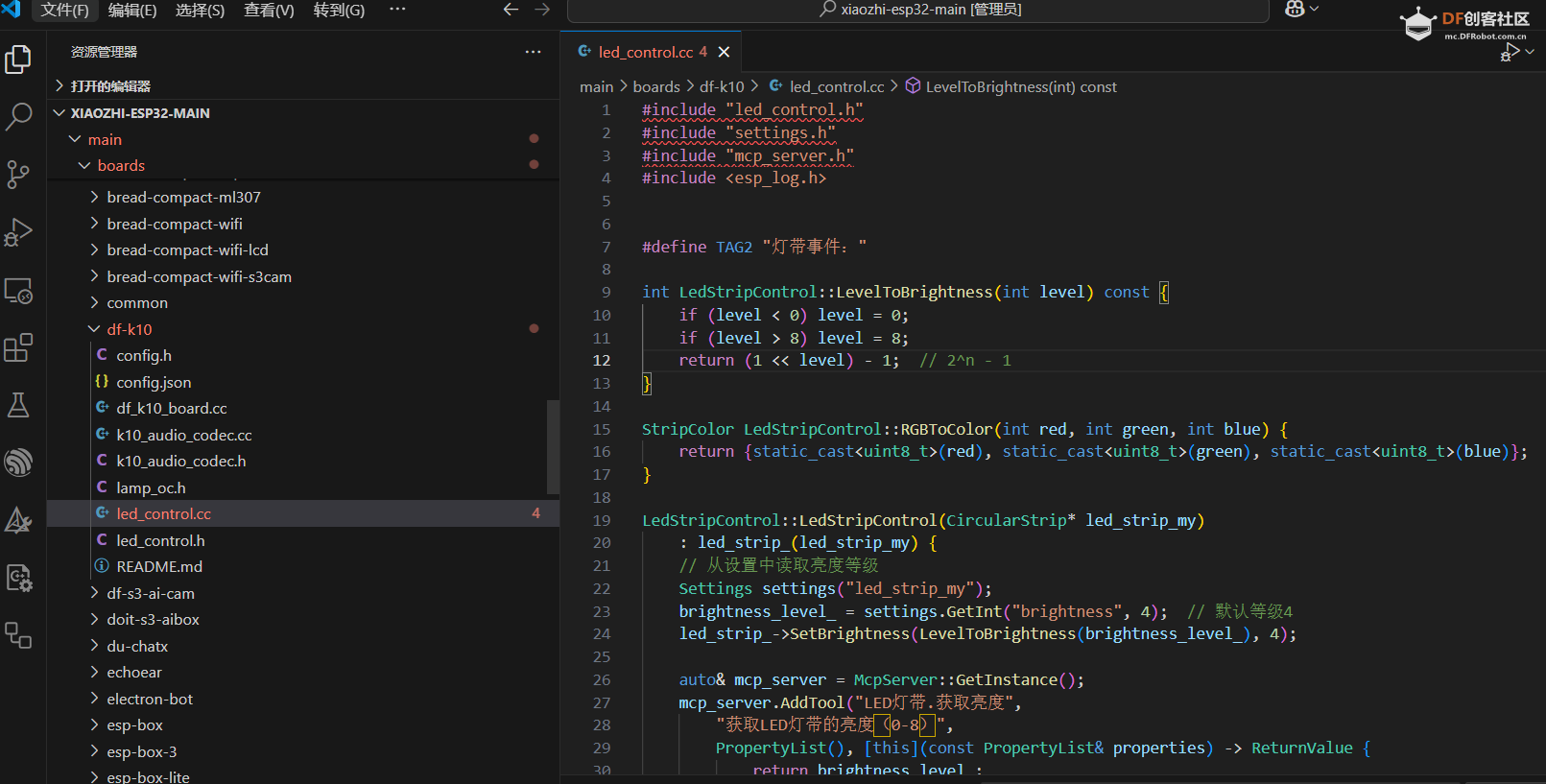
复制代码 【LED 灯带控制】 LED 灯带的控制通过 LedStripControl 类实现。该类提供了多种方法来控制灯带的亮度、颜色和闪烁模式。 获取亮度 :通过 LED灯带.获取亮度 接口,返回当前的亮度等级。设置亮度 :通过 LED灯带.设置亮度 接口,调整灯带的亮度。设置单个灯颜色 :通过 LED灯带.设置单个灯颜色 接口,控制灯带上某个特定位置的灯的颜色。设置所有灯颜色 :通过 LED灯带.设置所有灯颜色 接口,统一设置灯带上所有灯的颜色。闪烁 :通过 LED灯带.闪烁 接口,让灯带以指定的颜色和间隔闪烁。跑马灯 :通过 LED灯带.跑马灯 接口,实现跑马灯效果。关闭灯带 :通过 LED灯带.关闭 接口,关闭灯带。#include "led_control.h"
#include "settings.h"
#include "mcp_server.h"
#include <esp_log.h>
#define TAG2 "灯带事件:"
int LedStripControl::LevelToBrightness(int level) const {
if (level < 0) level = 0;
if (level > 8) level = 8;
return (1 << level) - 1; // 2^n - 1
}
StripColor LedStripControl::RGBToColor(int red, int green, int blue) {
return {static_cast<uint8_t>(red), static_cast<uint8_t>(green), static_cast<uint8_t>(blue)};
}
LedStripControl::LedStripControl(CircularStrip* led_strip_my)
: led_strip_(led_strip_my) {
// 从设置中读取亮度等级
Settings settings("led_strip_my");
brightness_level_ = settings.GetInt("brightness", 4); // 默认等级4
led_strip_->SetBrightness(LevelToBrightness(brightness_level_), 4);
auto& mcp_server = McpServer::GetInstance();
mcp_server.AddTool("LED灯带.获取亮度",
"获取LED灯带的亮度(0-8)",
PropertyList(), [this](const PropertyList& properties) -> ReturnValue {
return brightness_level_;
});
mcp_server.AddTool("LED灯带.设置亮度",
"设置LED灯带的亮度(0-8)",
PropertyList({
Property("level", kPropertyTypeInteger, 0, 8)
}), [this](const PropertyList& properties) -> ReturnValue {
int level = properties["level"].value<int>();
ESP_LOGI(TAG2, "Set LedStrip brightness level to %d", level);
brightness_level_ = level;
led_strip_->SetBrightness(LevelToBrightness(brightness_level_), 4);
// 保存设置
Settings settings("led_strip_my", true);
settings.SetInt("brightness", brightness_level_);
return true;
});
mcp_server.AddTool("LED灯带.设置单个灯颜色",
"设置单个LED灯的颜色。",
PropertyList({
Property("index", kPropertyTypeInteger, 0, 23),
Property("red", kPropertyTypeInteger, 0, 255),
Property("green", kPropertyTypeInteger, 0, 255),
Property("blue", kPropertyTypeInteger, 0, 255)
}), [this](const PropertyList& properties) -> ReturnValue {
int index = properties["index"].value<int>();
int red = properties["red"].value<int>();
int green = properties["green"].value<int>();
int blue = properties["blue"].value<int>();
ESP_LOGI(TAG2, "Set led strip single color %d to %d, %d, %d",
index, red, green, blue);
led_strip_->SetSingleColor(index, RGBToColor(red, green, blue));
return true;
});
mcp_server.AddTool("LED灯带.设置所有灯颜色",
"设置所有LED灯的颜色。",
PropertyList({
Property("red", kPropertyTypeInteger, 0, 255),
Property("green", kPropertyTypeInteger, 0, 255),
Property("blue", kPropertyTypeInteger, 0, 255)
}), [this](const PropertyList& properties) -> ReturnValue {
int red = properties["red"].value<int>();
int green = properties["green"].value<int>();
int blue = properties["blue"].value<int>();
ESP_LOGI(TAG2, "Set led strip all color to %d, %d, %d",
red, green, blue);
led_strip_->SetAllColor(RGBToColor(red, green, blue));
return true;
});
mcp_server.AddTool("LED灯带.闪烁",
"让LED灯带闪烁。",
PropertyList({
Property("red", kPropertyTypeInteger, 0, 255),
Property("green", kPropertyTypeInteger, 0, 255),
Property("blue", kPropertyTypeInteger, 0, 255),
Property("interval", kPropertyTypeInteger, 0, 1000)
}), [this](const PropertyList& properties) -> ReturnValue {
int red = properties["red"].value<int>();
int green = properties["green"].value<int>();
int blue = properties["blue"].value<int>();
int interval = properties["interval"].value<int>();
ESP_LOGI(TAG2, "Blink led strip with color %d, %d, %d, interval %dms",
red, green, blue, interval);
led_strip_->Blink(RGBToColor(red, green, blue), interval);
return true;
});
mcp_server.AddTool("LED灯带.跑马灯",
"让LED灯带跑马灯。",
PropertyList({
Property("red", kPropertyTypeInteger, 0, 255),
Property("green", kPropertyTypeInteger, 0, 255),
Property("blue", kPropertyTypeInteger, 0, 255),
Property("length", kPropertyTypeInteger, 1, 7),
Property("interval", kPropertyTypeInteger, 0, 1000)
}), [this](const PropertyList& properties) -> ReturnValue {
int red = properties["red"].value<int>();
int green = properties["green"].value<int>();
int blue = properties["blue"].value<int>();
int interval = properties["interval"].value<int>();
int length = properties["length"].value<int>();
ESP_LOGI(TAG2, "Scroll led strip with color %d, %d, %d, length %d, interval %dms",
red, green, blue, length, interval);
StripColor low = RGBToColor(4, 4, 4);
StripColor high = RGBToColor(red, green, blue);
led_strip_->Scroll(low, high, length, interval);
return true;
});
mcp_server.AddTool("LED灯带.关闭",
"关闭LED灯带",
PropertyList(), [this](const PropertyList& properties) -> ReturnValue {
ESP_LOGI(TAG2, "Turn off led strip");
led_strip_->clear(); // 清除所有LED灯的颜色,即关闭灯光
return true;
});
}
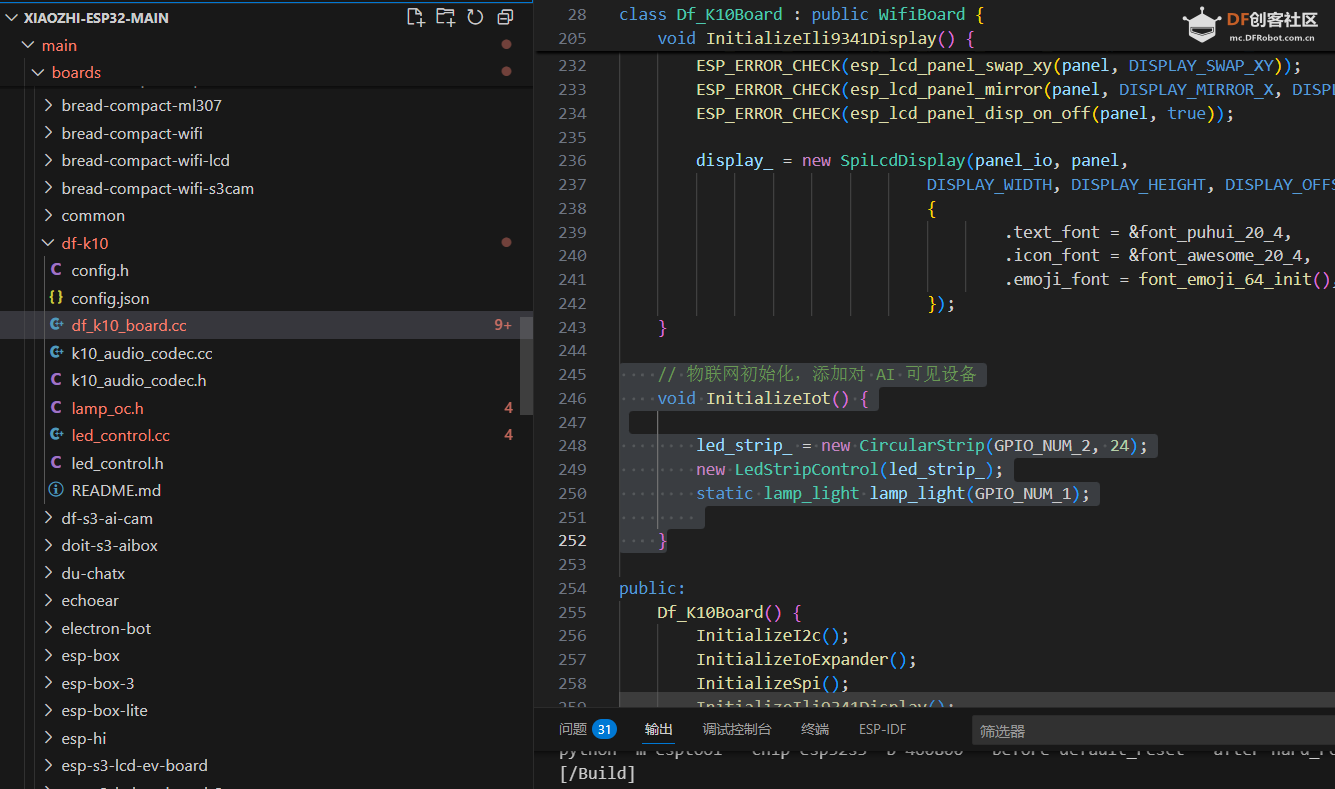
复制代码 【注册设备 】 #include "lamp_oc.h"
// 物联网初始化,添加对 AI 可见设备
void InitializeIot() {
led_strip_ = new CircularStrip(GPIO_NUM_2, 24);
new LedStripControl(led_strip_);
static lamp_light lamp_light(GPIO_NUM_1);
} 复制代码 https://img.dfrobot.com.cn/wikicn/5cabf4771804207b131ae8cb/36b61e6635492b977df87d55fe5dca4e.pdf void CircularStrip::clear() {
std::lock_guard<std::mutex> lock(mutex_);
led_strip_clear(led_strip_);
led_strip_refresh(led_strip_);
} 复制代码 【演示视频】
【项目总结】 





 沪公网安备31011502402448
沪公网安备31011502402448
 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创客造
创客造
 编辑选择奖
编辑选择奖
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






