|
10797| 10
|
告别上下车上锁下锁的烦恼——车位智能锁 |

|
本帖最后由 章 于 2024-4-15 10:48 编辑 【视频演示】 【项目背景】 现在我们许多家庭都有自己的车位,但有时我们的车位会被别人占领,这时就要联系物业或车主,十分的麻烦,假如车主有事来不了,我们就停不了车,为了解决这个问题,我们可以给车位安装上车位锁,但如果是普通的车位锁,上锁下锁也很不方便,所以就做了这个智能车位锁这个作品。 【功能介绍】 1、利用HuskyLens AI摄像头的学习功能可以事先学习自家的车牌号(由于HuskyLens AI摄像头不能进行车牌识别,我们可以在车牌边贴一个标签来代替)。 2、当红外避障模块检测到车位上没有汽车时,车位锁就会自动上锁。 3、当红外避障传感器检测到有汽车时,哈士奇摄像头就开始识别车牌(标签),如果是自家汽车时就自动开锁,否则不开锁。 4、如果有亲戚或朋友的汽车要停时,我们可以告诉他密码,输入正确密码后也会自动开锁。 【硬件清单】
【设计组装】 1、外观结构设计与切割 外观结构的材料采用3MM的椴木板,根据硬件组装的需求及作品外观的设想,先利用LaserMaker软件在电脑上设计出其外壳图纸,再用激光切割机切割出来。外观结构设计图如图1所示: 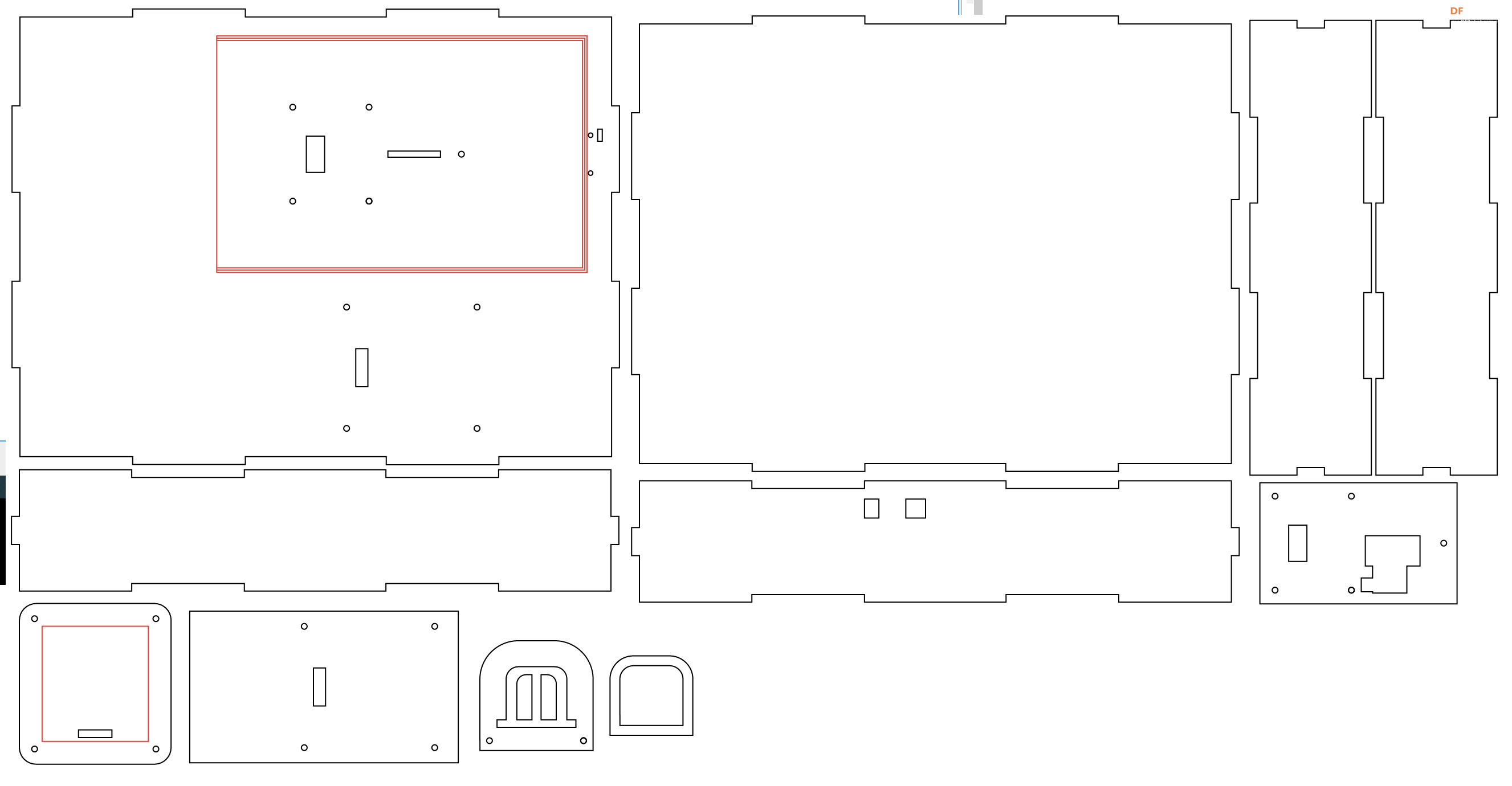 图1 外观结构设计图 2、把红外避障感器、舵机分别利用热熔胶固定在相应位置,如图2所示: 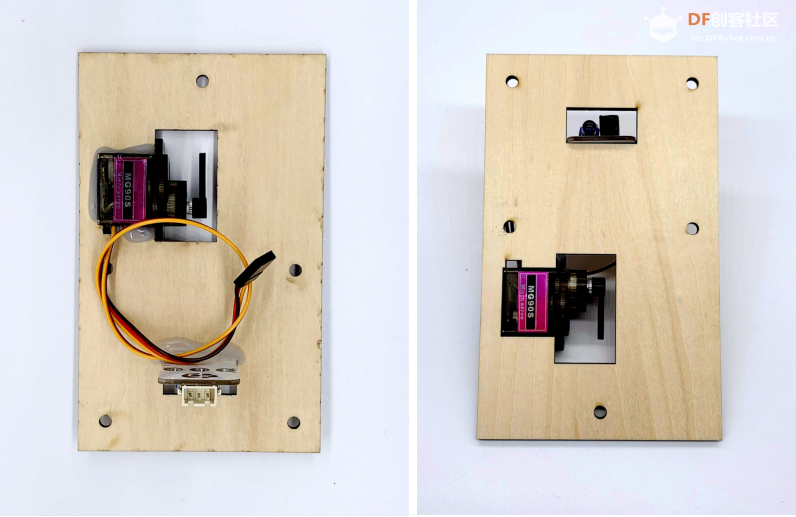 图2 安装红外避障传感器和舵机 3、把Arduon主控板和矩阵键盘固定在相应位置。如图3所示: 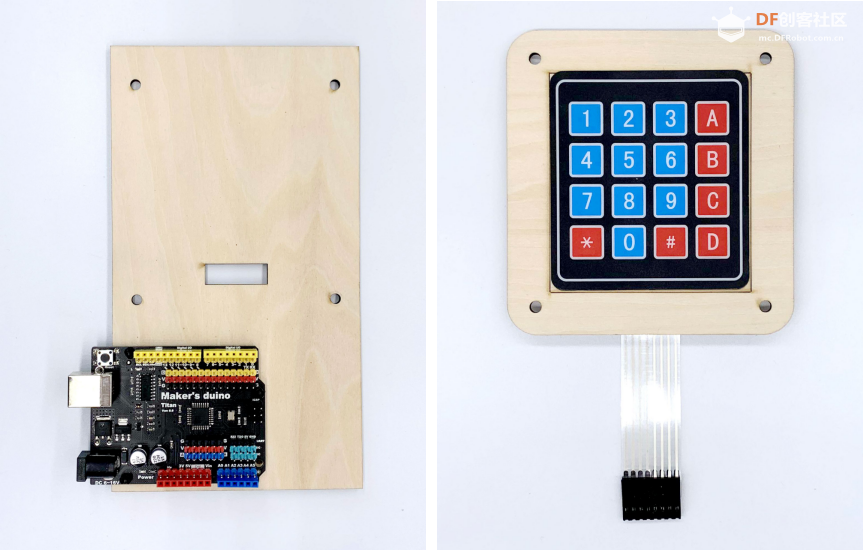 图3 安装Arduino主控板和矩阵键盘 4、安装车锁结构部分。如图4所示: 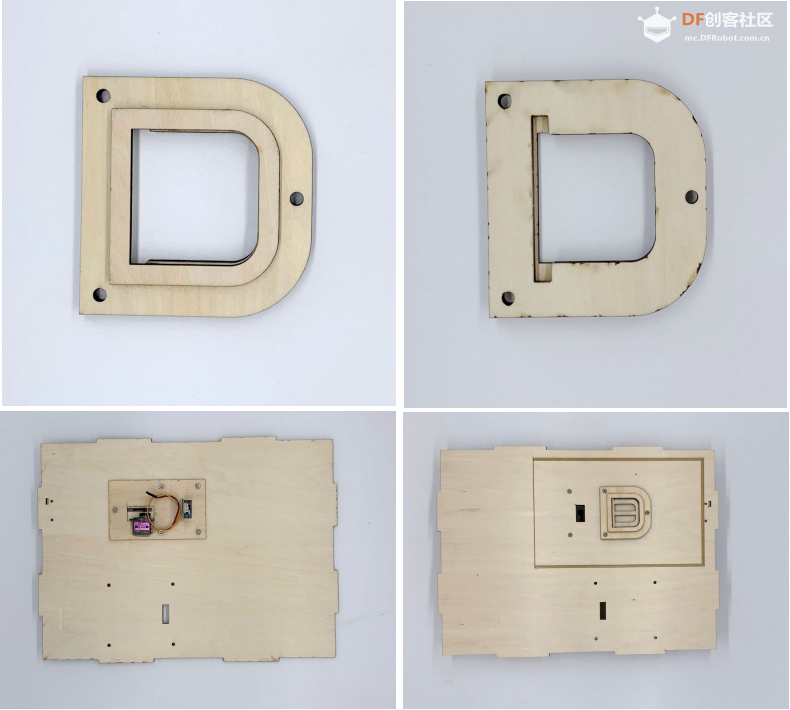 图4 安装车锁结构部分 5、把主控板部分和矩阵键盘部分安装在上面板上。如图5所示: 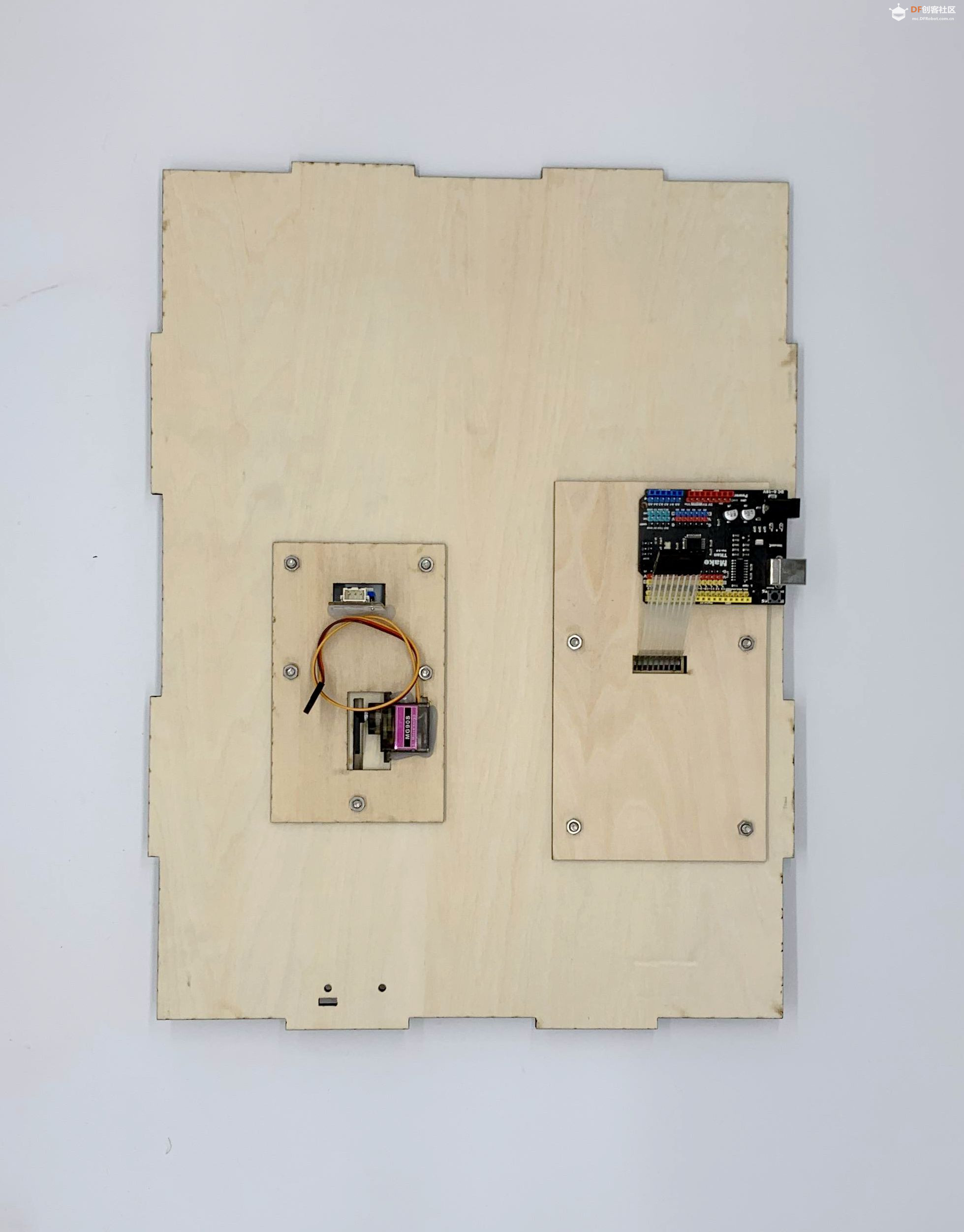 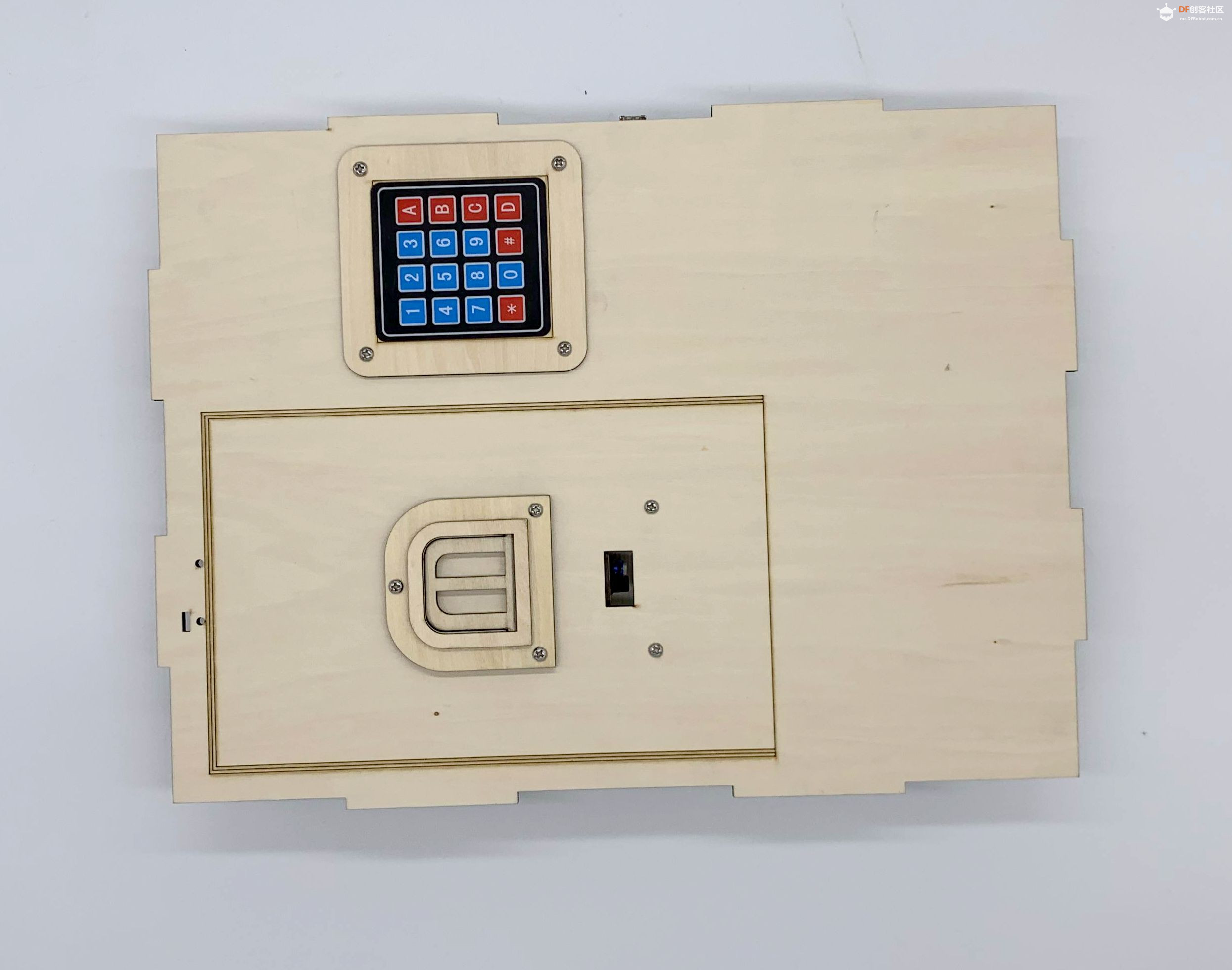 图5 上面板组装 6、把HuskyLens AI摄像头安装到顶部面板上。如图6所示: 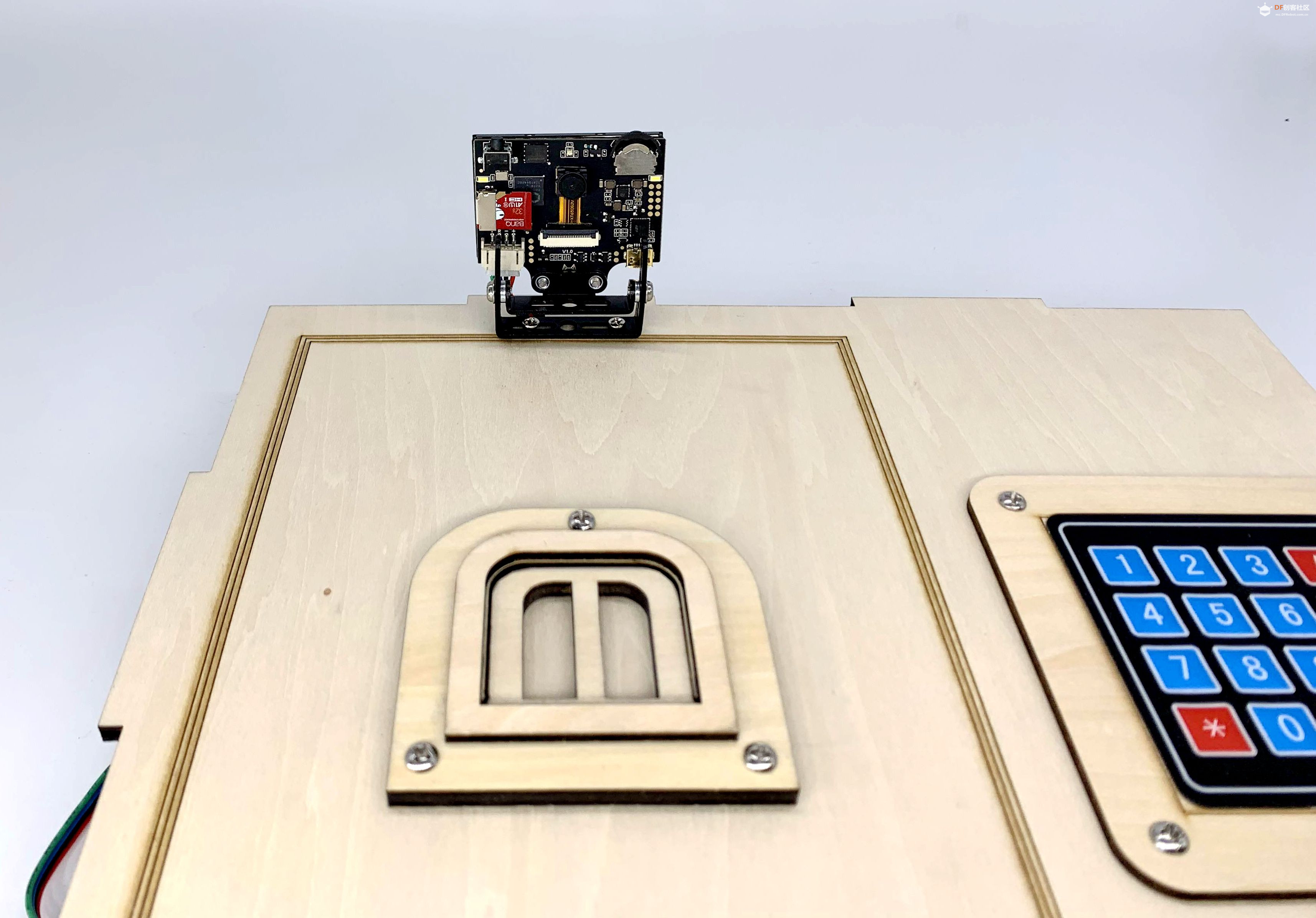 图6 安装HuskyLens AI摄像头 7、把各个传感器按照接线图所示与Arduino主控板连接好。如图7所示: 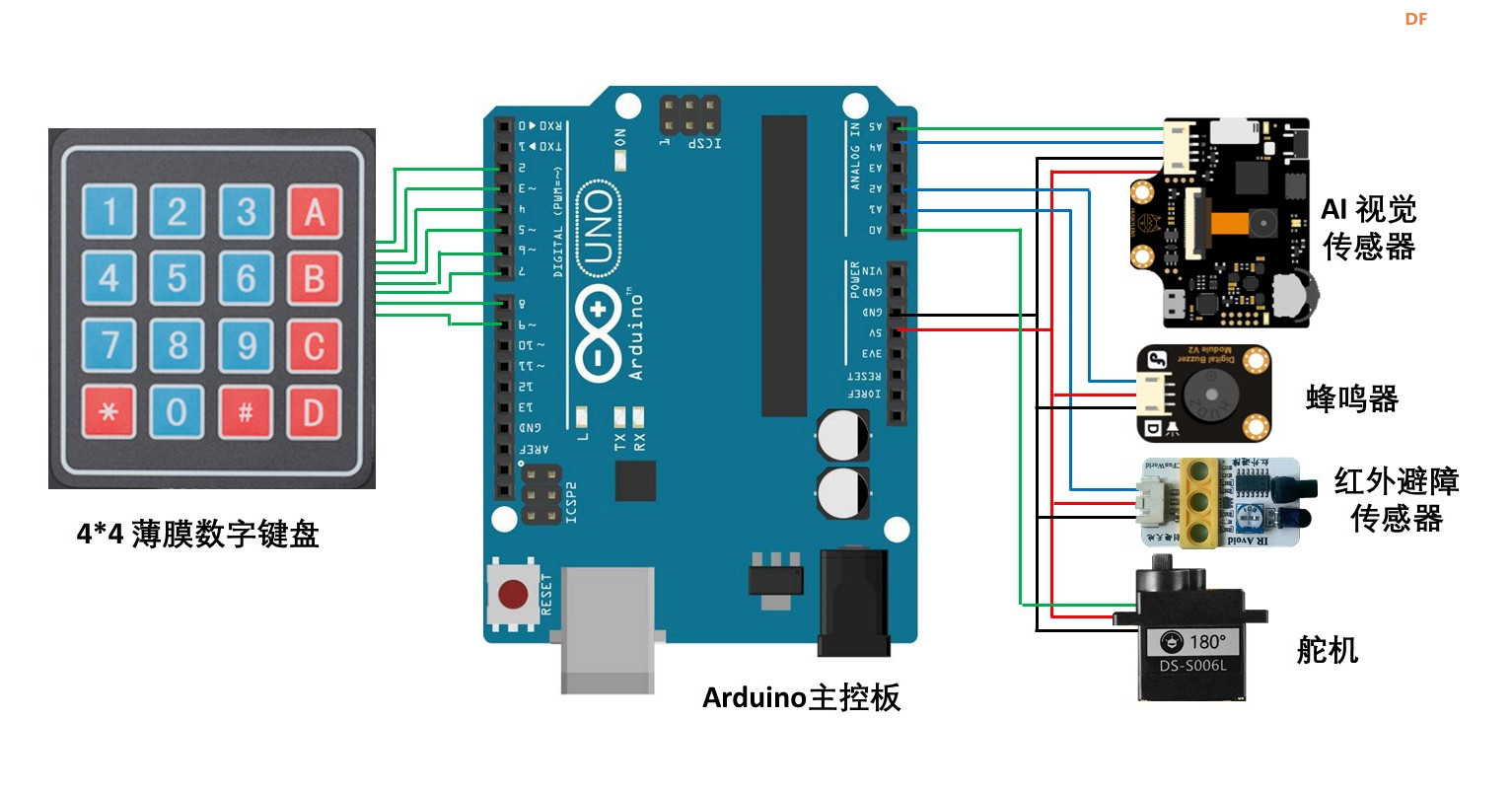 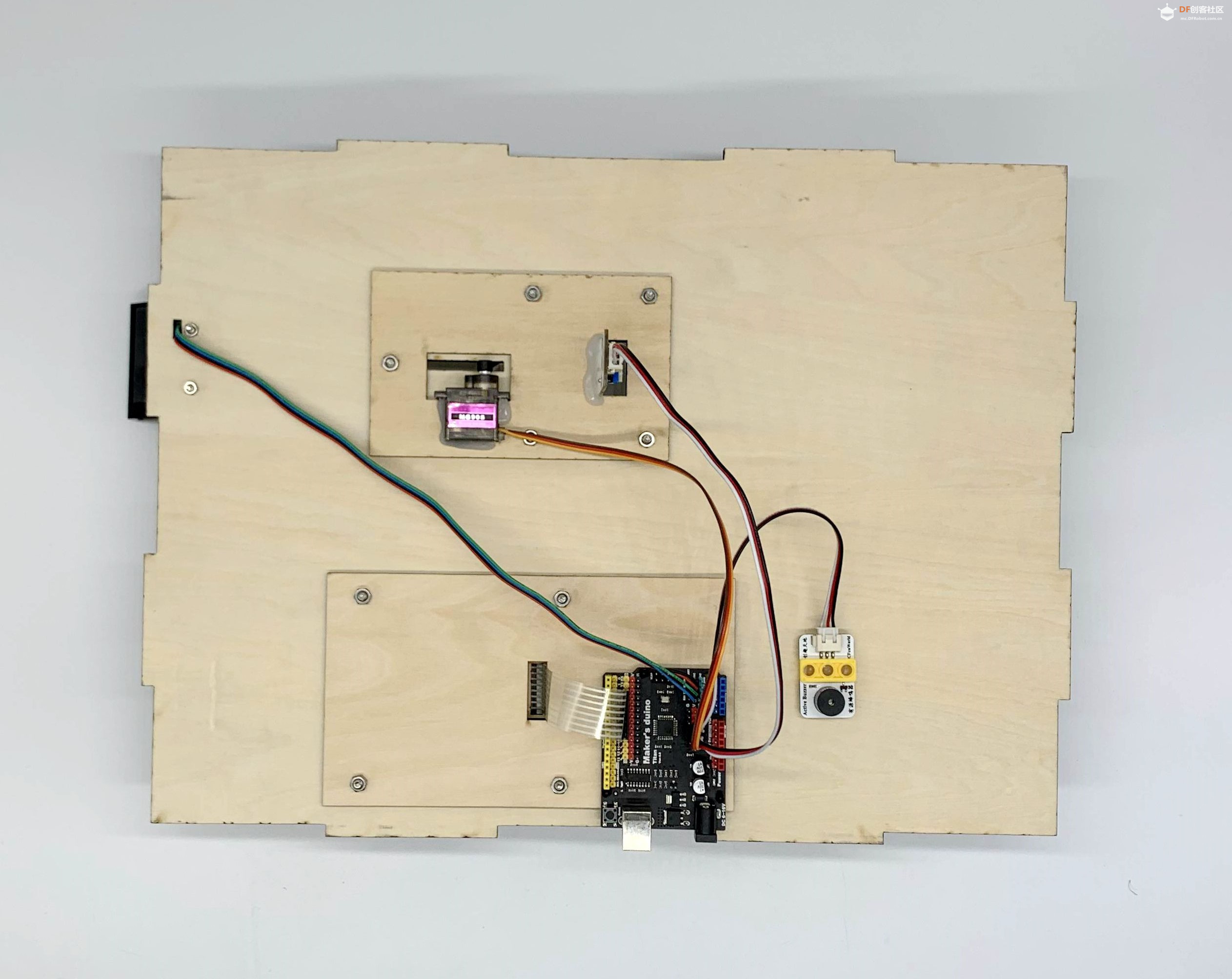 图7 电路接线图 8、最后再安装好底部盒子,再把顶面板安装上固定好,这样整个结构就组装完成了。如图8所示:    图8 完成组装 【程序编写】 1、程序的编写软件是Mind+,打开Mind+软件,切换到上传模式。如图9所示:  图9 切换到上传模式 2、作品使用的主控板是Arduino UNO,传感器执行器有红外避障模块、哈士奇摄像头、舵机、蜂鸣器等,我们先选择相应的主控板和传感器、执行器。点击左下角的“扩展”,在弹出窗口的“主控板”选项卡中选择“Arduino UNO”,在“传感器”选项卡中选择“HUSKYLENS AI摄像头”,在“执行器”选项卡中选择“舵机模块”。如图10、图11、图12、图13所示: 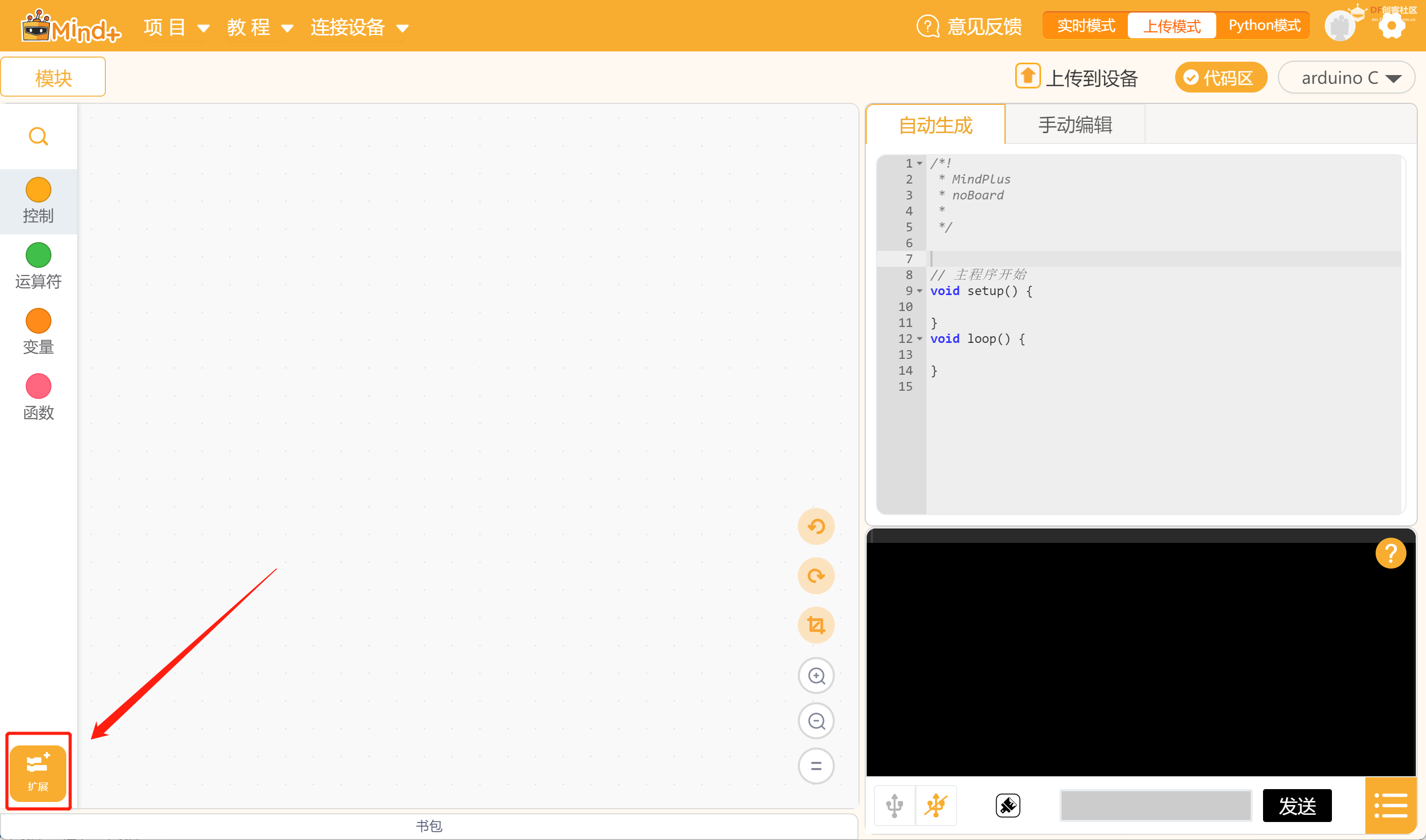 图10 添加“扩展”  图11 添加“Arduino Uno”主控板 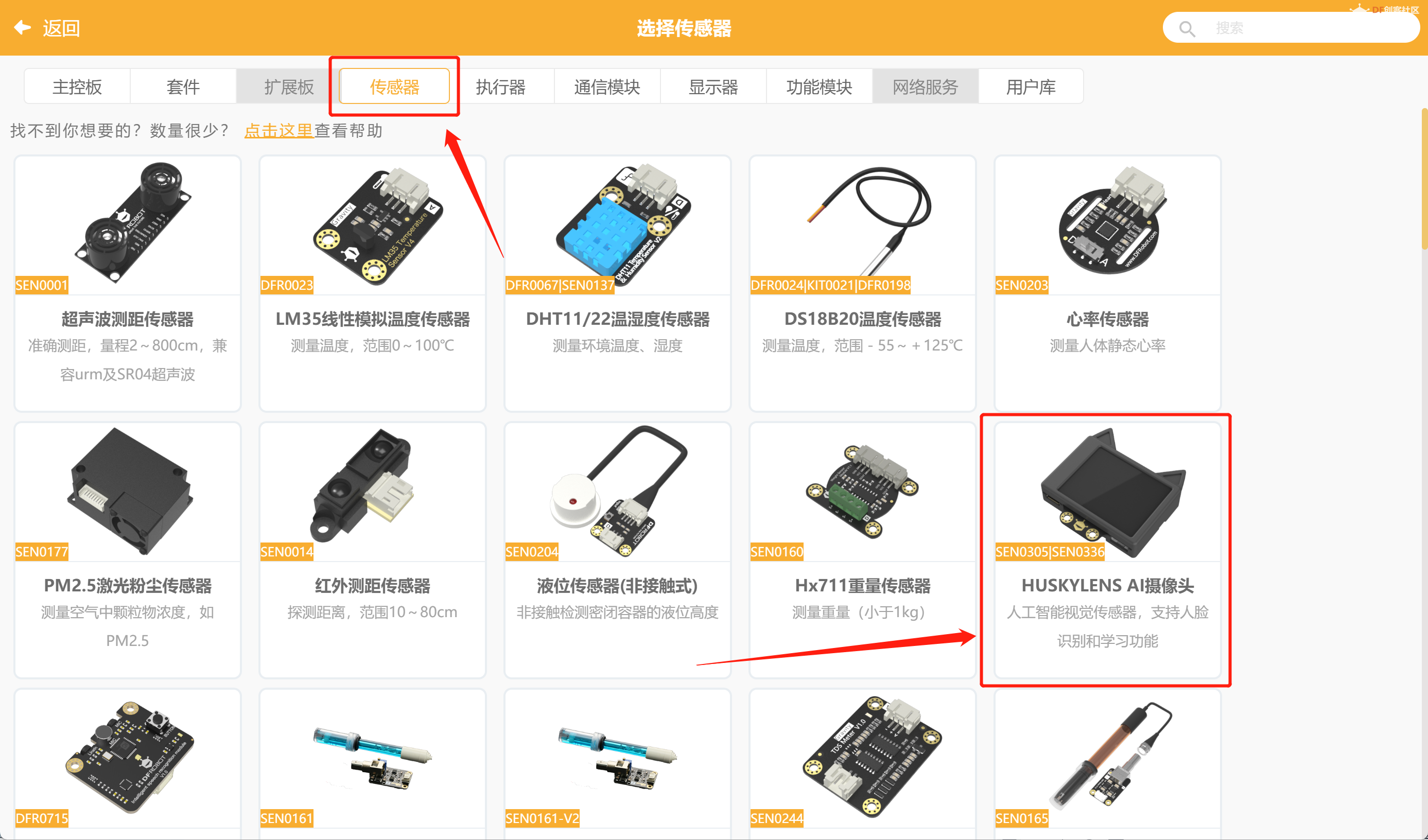 图12 添加“HuskyLens AI 摄像头”传感器 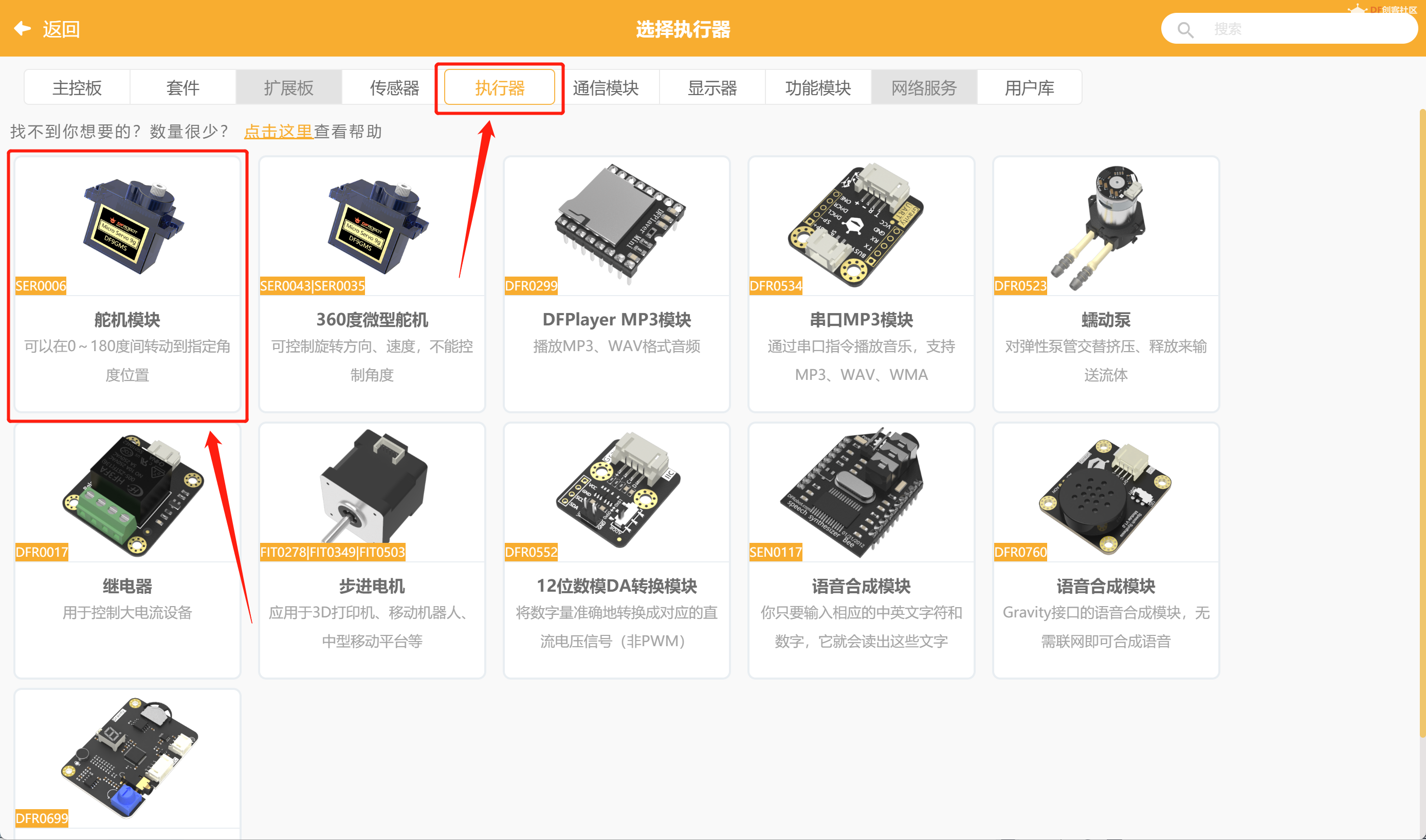 图13 添加“舵机” 3、添加矩阵键盘传感器。由于矩阵键盘传感器在Mind+默认状态下是没加载的,需要在用户库里自行添加,切换到“用户库”选项卡,在下面的输入框内输入网址:https://gitee.com/hockel/keypad,回车确定,下面就会出现4*4矩阵键盘,点击它就会加载上,最后点击左上角的“返回”,返回到编程主界面。如图14、图15所示:  图14 添加“矩阵键盘” 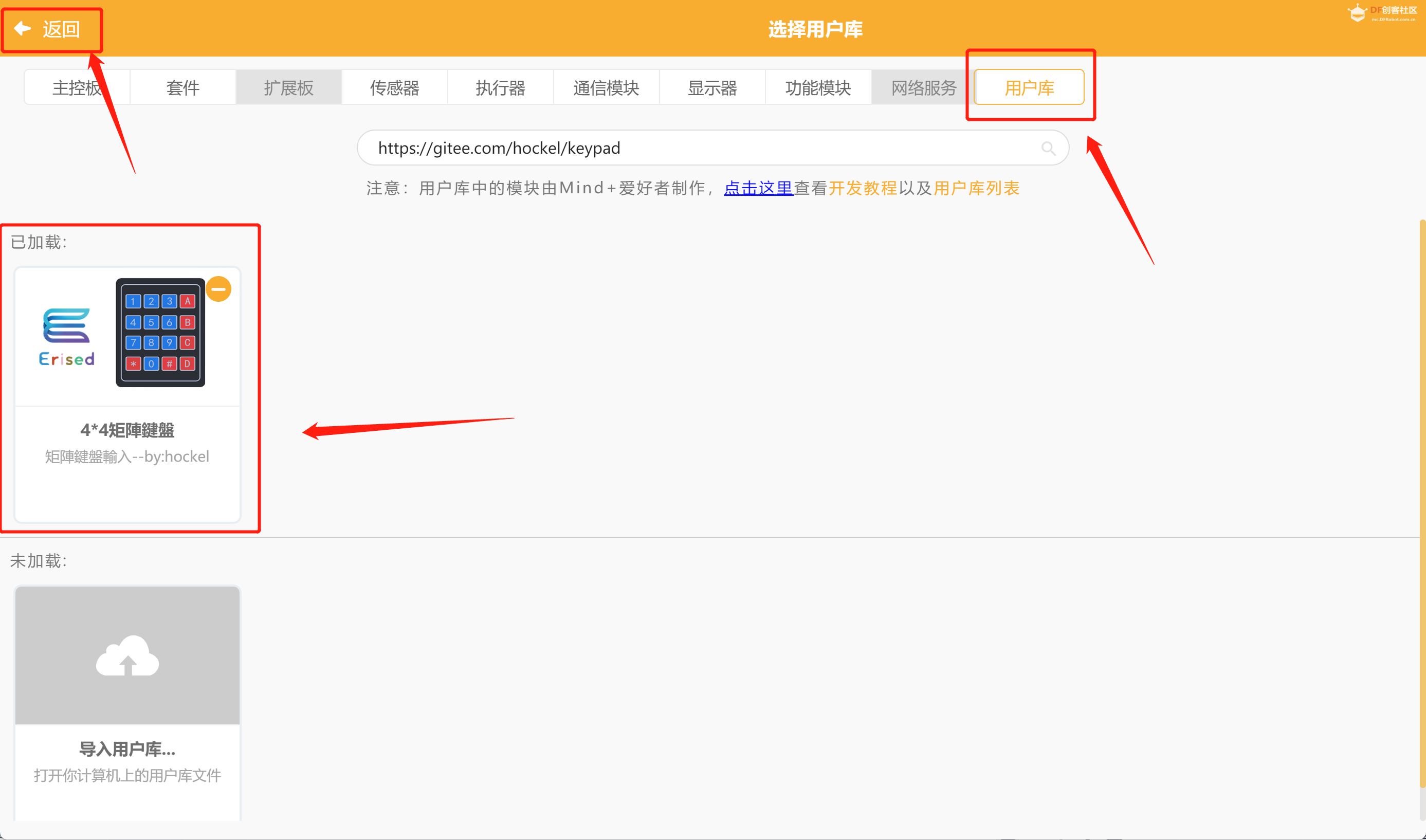 图15 返回到编程主界面 4、传感器的初始化操作以及变量的定义。 我们先选中左侧底部的“用户库”,再把有关矩阵键盘初始化的两个积木拖出来,在上面的接线中矩阵键盘是接在2—9接口的,所以根据实际情况修改两个积木中的接口,同样道理,我们选中左侧的传感器,把HuskyLers摄像头的初始化和算法切换积木块拖出来接上,并把算法改为“标签识别”。 新建一个“输入内容”的字符串类型变量并赋值为空,它是用来存放矩阵键盘输入的内容。再新建3个数字类型变量,变量“角度”用来确定舵机的角度,赋值为120;变量“密码状态”主要用来控制键盘输入程序是否执行,赋值为0表示输入无效;变量“密码”主要用来存放键盘输入结果,用于与预设密码进行比较,这里也先赋值为0。 选中左侧执行器,把设置舵机角度的积木拖出来接下变量的下面,舵机是接在A0针脚的,所以接口这里改为A0,把变量“角度”放在舵机角度处,上面变量“角度”是120,所以一开始我们让舵机转到120度,处于开锁状态。程序如图16所示:  图16 初始化程序 5、选中左侧“函数”,再新建3个处定义函数,分别为密码、锁降、锁升,“密码”函数中主要是放有关密码输入程序的积木,“锁降”函数中主要是放车位锁下降即开锁相关的程序,“锁升”函数中主要是放车位锁上升相关的程序。程序如图17所示:  图17 新建“密码”、“锁降”、“锁升”函数 6、车位锁的升降主要是由舵机控制的,当舵机转到30度时,表示上锁,当舵机转到120度时,表示下锁,为了使舵机转动平滑一点,我们可以采取每次转3度,直到转到相应角度。程序如图18所示: 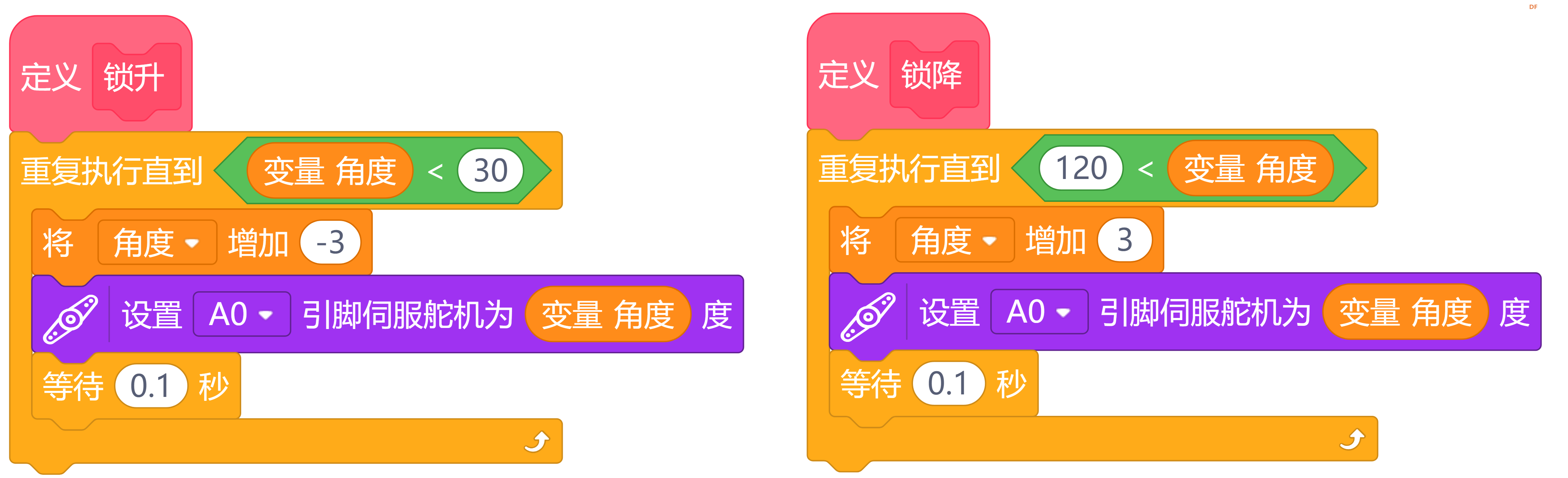 图18 函数“锁升”、“锁降”程序 7、有关“密码”函数中的程序及说明如下图19: 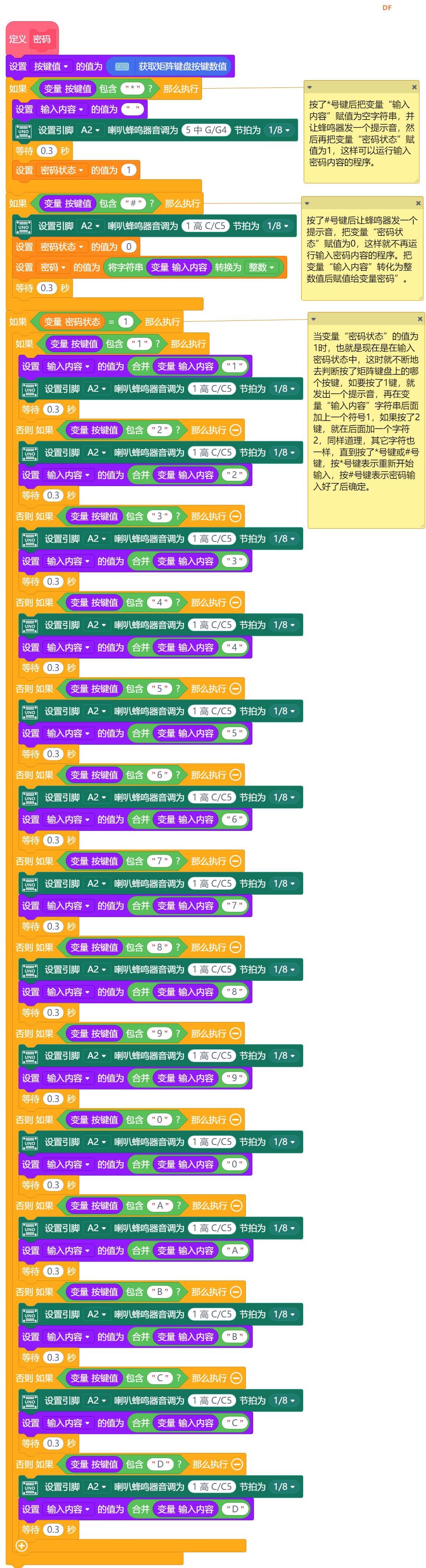 图19 “密码”函数程序 8、在车位中间位置安装了一个红外壁障传感器,我们把它接在A1针脚上,它主要用来检测有没有车,所以在循环执行中先放一个如果否则条件执行积木,如果没有汽车时也就是“数字引脚A1”的值为“假”时,车位锁就会自动上锁。如果有车也就是“数字引脚A1”的值为真时,再读取哈士奇摄像头的数据(摄像头识别汽车上的标签的ID),再运行“密码”函数,接着再判断密码是否为528或者学习过的ID为1或2的标签是否在摄像头拍到的画面中,如有三者条件中只要满足一个就会开锁。 开锁后再次去判断红外避障模块上有没有汽车,如果有,再次判断,直到汽车开走,再把变量“密码”赋值为0,相当于密码消除,不然不管什么车开来,车锁都会下降。程序如图20所示: 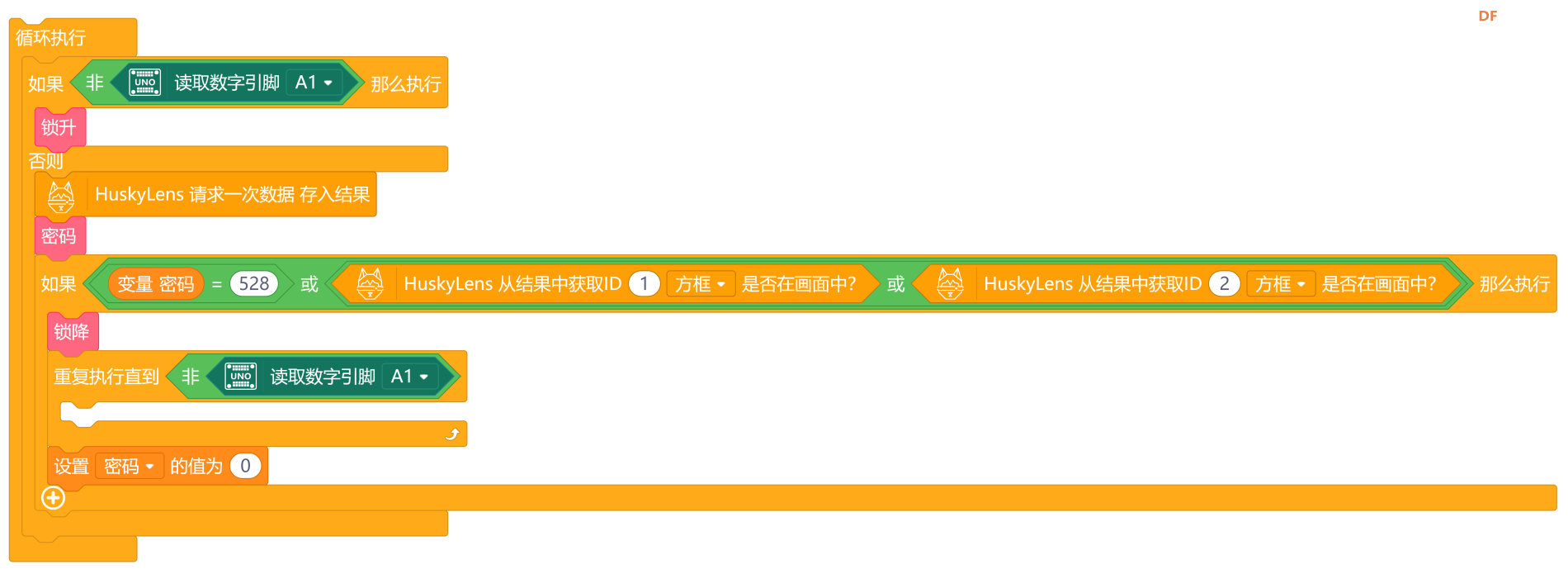 图20 主程序 8、完整程序如图21所示: 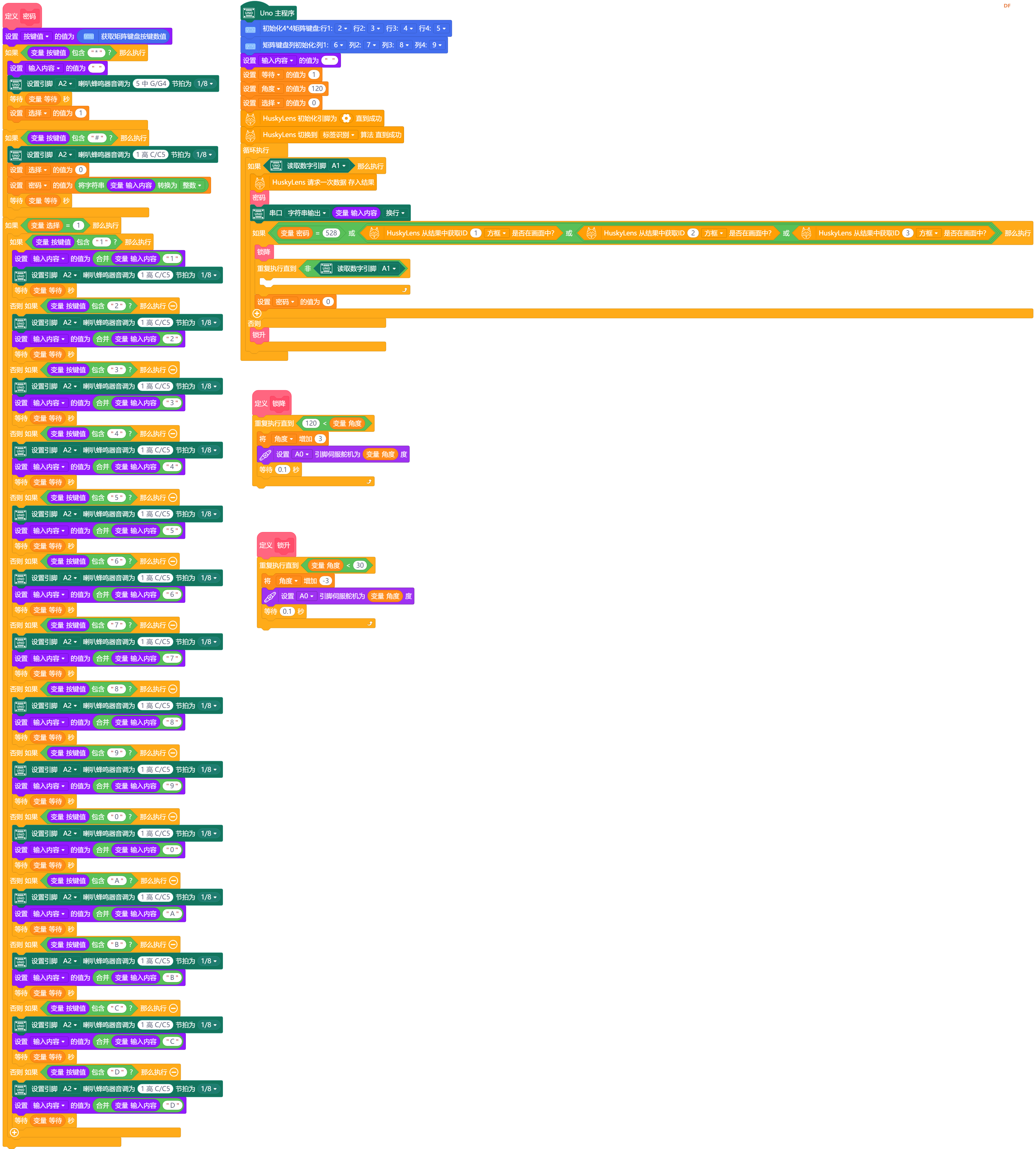 图21 智能车位锁完整程序 【结语】 由于HuskyLens AI摄像头没有车牌识别的功能,但它有个标签识别功能,这个作品中是借助标签识别功能来实现的,把标签贴在车牌边。也试过HuskyLens AI摄像头的物体分类,先对车牌不同的角度进行学习,但实际效果不理想。在离线的情况下大家有没有更好的办法呢? 作者其它帖子 ◆ 基于图像识别技术的作业提交助手 ◆ 从此不再害怕背古诗——古诗点播机 ◆ 一个具有视觉识别功能的留言管家 ◆ 防疫门禁 ◆ 拉风侠——垃圾分类小助手 ◆ 垃圾分类训练机 ◆ 盲人伴侣 ◆ 终点计时器 ◆ 无限梦幻镜 ◆ 智能药盒 ◆ 乒乓球收割机——AI捡球机器人 ◆ 捡球机器人 ◆ 变脸机器人 ◆ 多功能测量仪 ◆ 防近视笔筒 ◆ 猜拳机器人 ◆ 炫彩小夜灯 ◆ 麦昆PLUS巡线&避障 ◆ 手势控制MP3播放器&万能遥控器 ◆ 小便池自动冲洗器 ◆ 百变乐器 ◆ 留言机 ◆ 【2020】创意时钟 ◆ 爱的传递——AI爱心储物柜 ◆ 智能储蓄罐 ◆ 和弦吉他的设计与制作 ◆ 看得见的心跳 ◆ 保险箱 ◆ 乐高积木遇见麦克纳姆轮——动手搭建一辆麦克纳姆轮小车 ◆ 小尚,别跟丢了!——自动跟随的麦克纳姆轮小车 ◆ 来吧!一起动手制作一台架子鼓 ◆ 激光打靶器 ◆ 钥匙忘带提醒器 ◆ 麦昆智能晾衣架 ◆ 炫彩电子钢琴的设计与制作 ◆ 萌宠机器人的设计与制作 ◆ DIY留声机 ◆ 智能马桶 ◆ 坐姿矫正仪 ◆ 基于物联网的智能闸道、人数统计与安全预警系统 ◆ 远程监测温度和亮度 ◆ 来来来,让我们一起来打地鼠! ◆ 变色龙 ◆ 龙舟 ◆ 多脚怪 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶



 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖






