|
7010| 71
|
[项目] 【花雕学编程】Arduino动手做(225)---AS5600的16个小实验 |
|
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程) 实验二百二十五:AS5600磁编码器 磁感应角度测量传感器 12bit高精度模块 项目实验之二:将AS5600角度传感器集成到电机项目中 实验开源代码 |
|
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程) 实验二百二十五:AS5600磁编码器 磁感应角度测量传感器 12bit高精度模块 项目实验之十六:转动电机轴,从AS5600读取原始数据,并计算角度、速度和位置 实验开源代码 |
|
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程) 实验二百二十五:AS5600磁编码器 磁感应角度测量传感器 12bit高精度模块 项目实验之十二:使用AS5600传感器读取角度数据,并计算步进电机的实时转速 实验开源代码 |
|
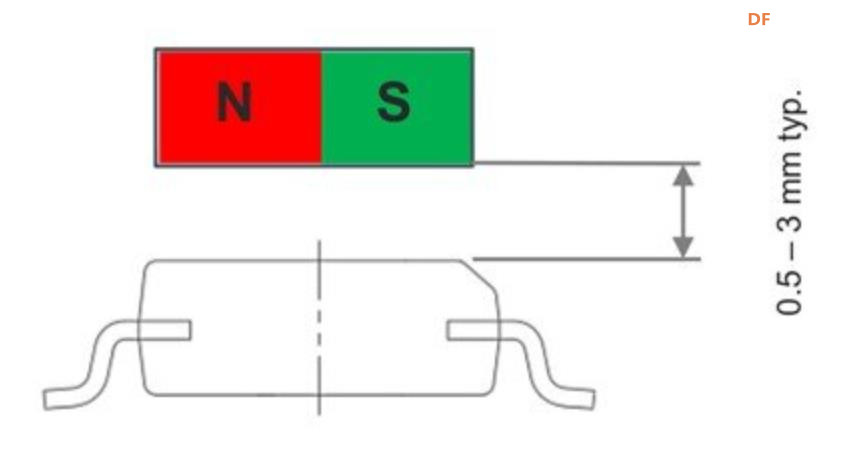
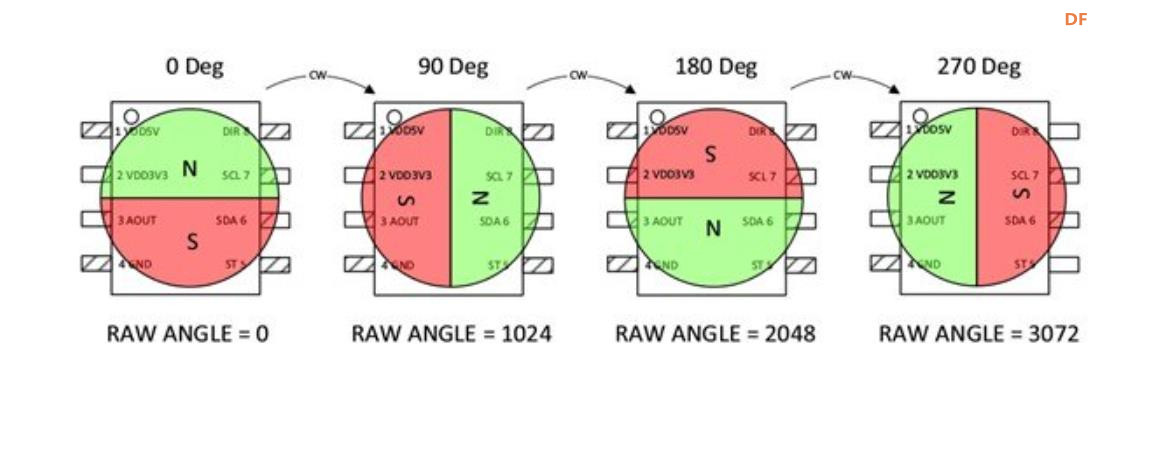
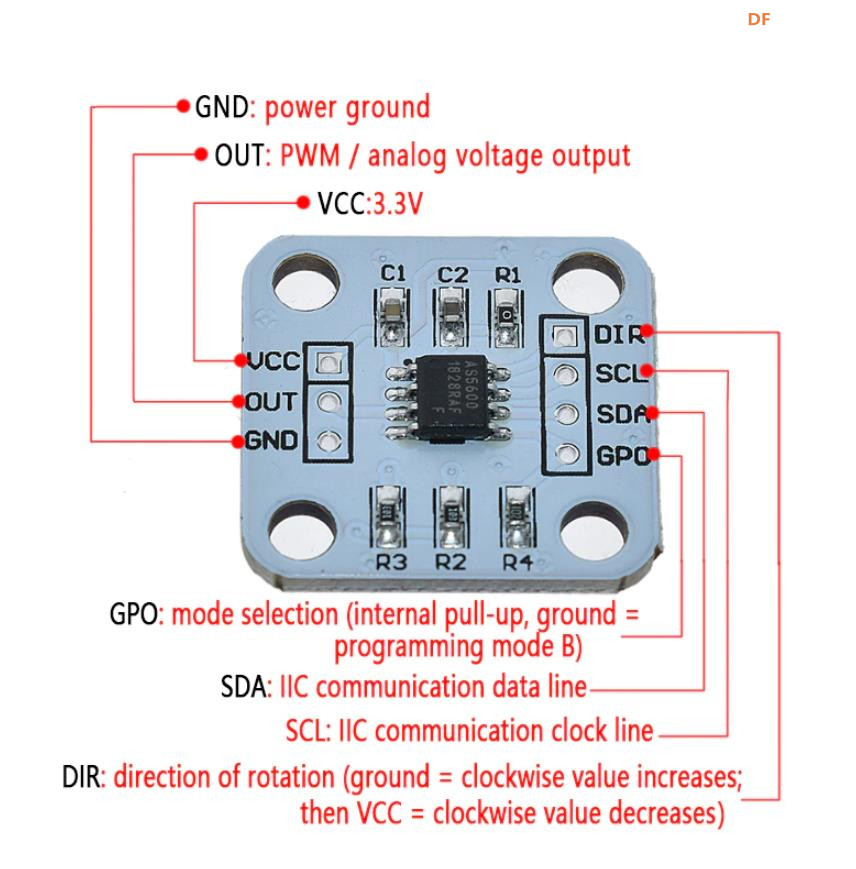
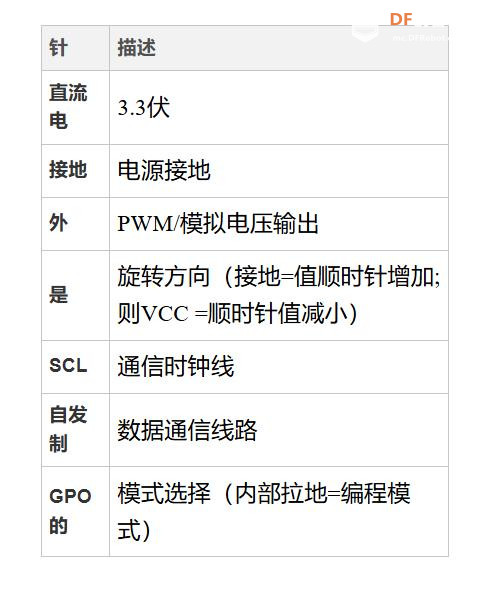
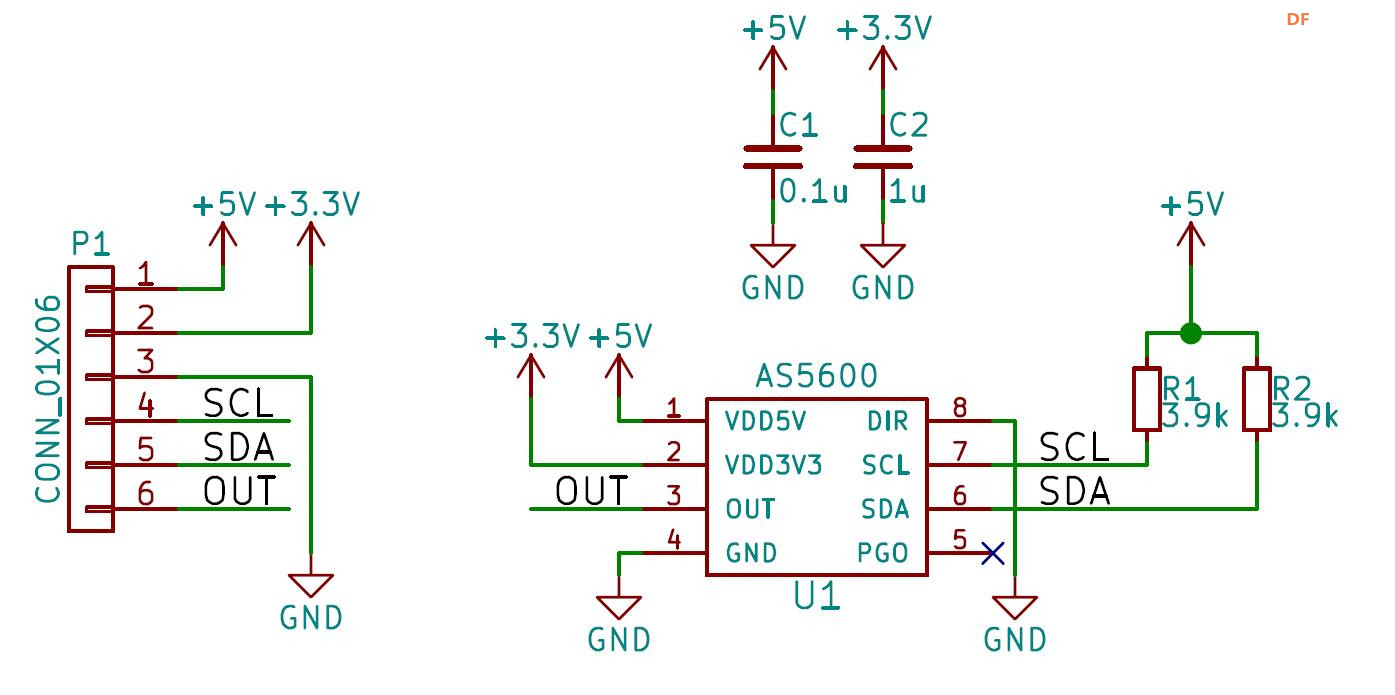
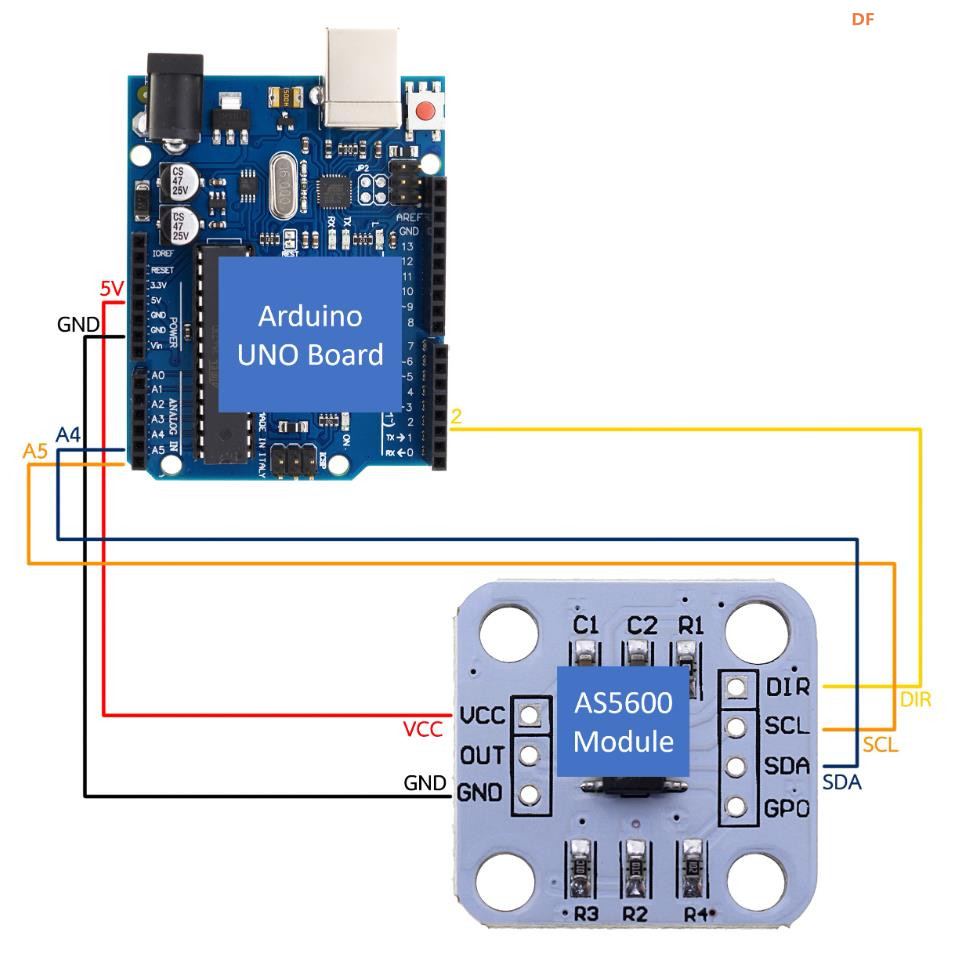
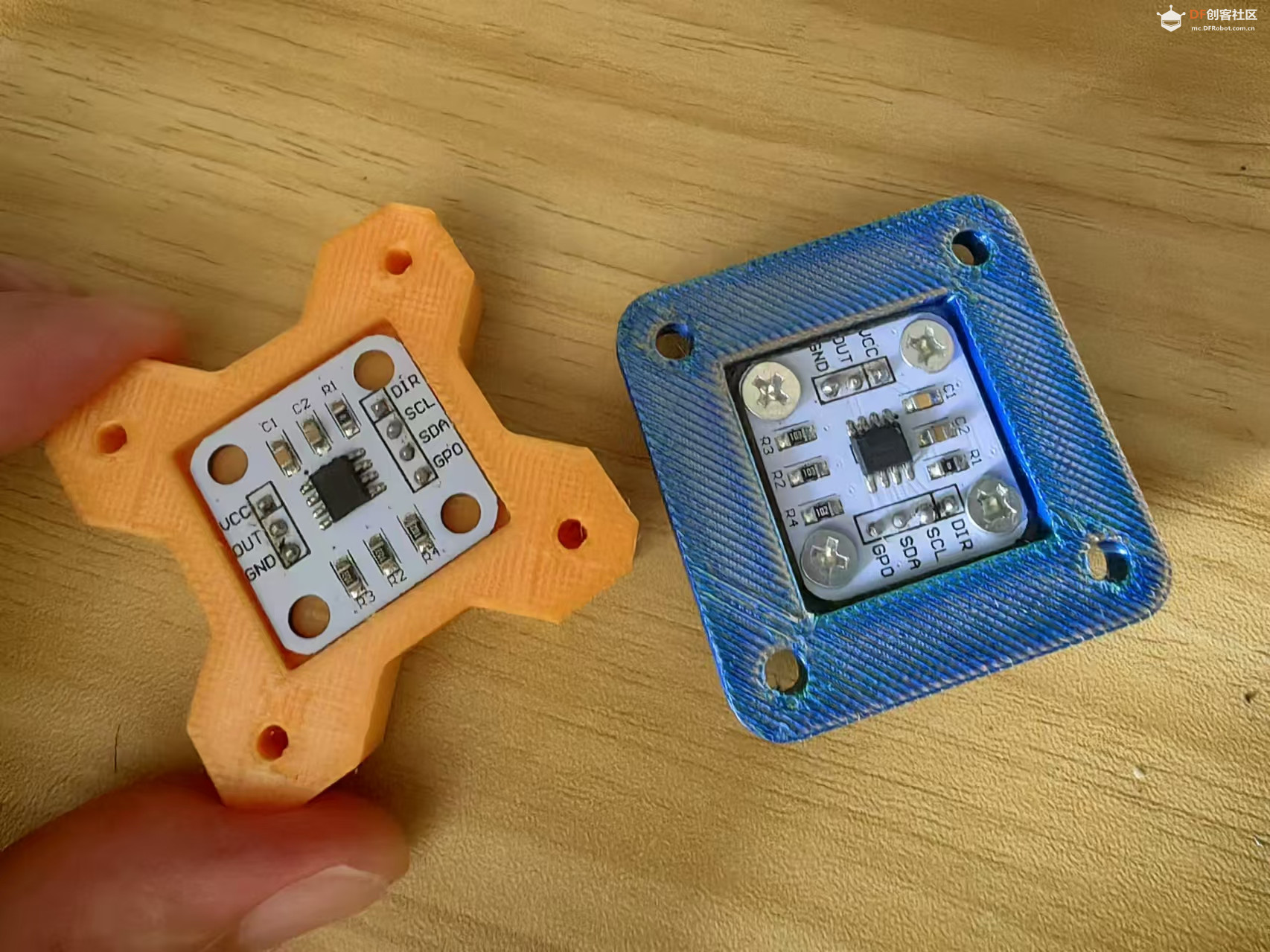
核心芯片:AS5600 是一款易于编程的磁性旋转位置传感器,具有高分辨率 12 位模拟或 PWM 输出。这种非接触式系统测量径向磁化同轴磁体的绝对角度。这款 AS5600 专为非接触式电位计应用而设计,其坚固的设计消除了任何均匀的外部杂散磁场的影响。行业标准的I²C接口支持用户对非易失性参数进行简单编程,无需专门的编程器。此外,该器件还实现了在所谓的“3线模式”中轻松进行启动和停止位置编程,无需编程器或数字接口。输出的默认范围是 0 到 360 度。AS5600 可以通过编程零角度(开始位置)和最大角度(停止位置)来应用于较小的范围。AS5600 还配备了智能低功耗模式功能,可自动降低功耗。  |
|
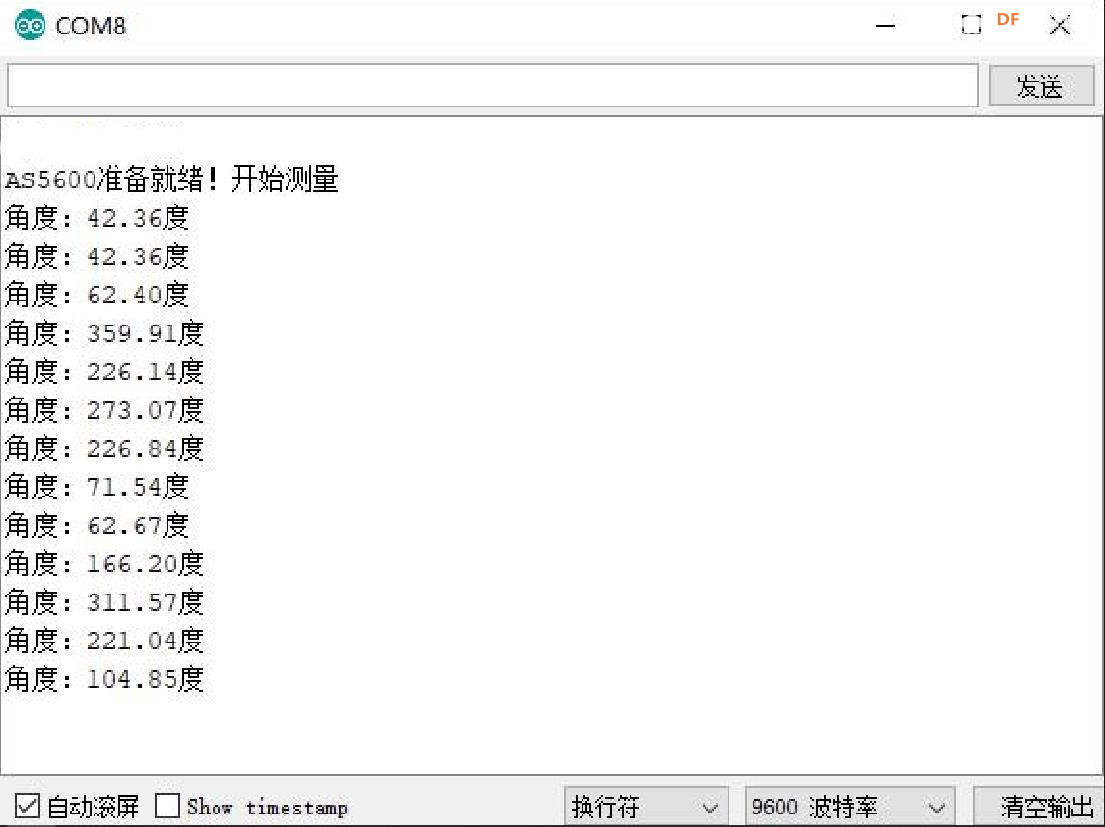
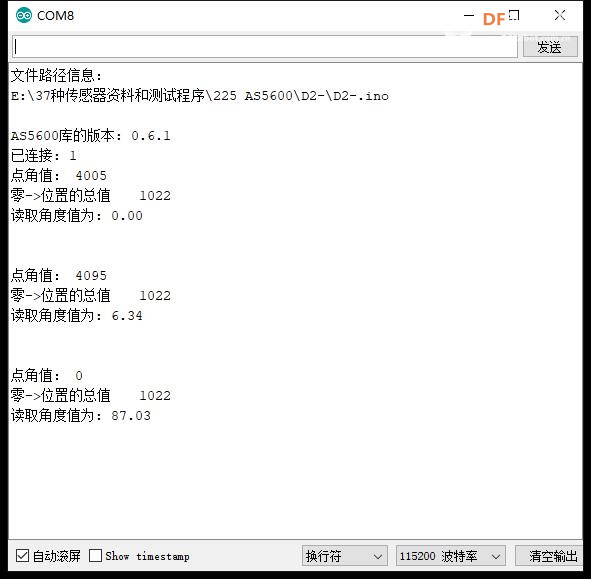
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程) 实验二百二十四:AS5600磁编码器 磁感应角度测量传感器 12bit高精度模块 项目实验之一:从AS5600读取角度值 实验开源代码 |
conversion_de_angle函数: |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2025 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶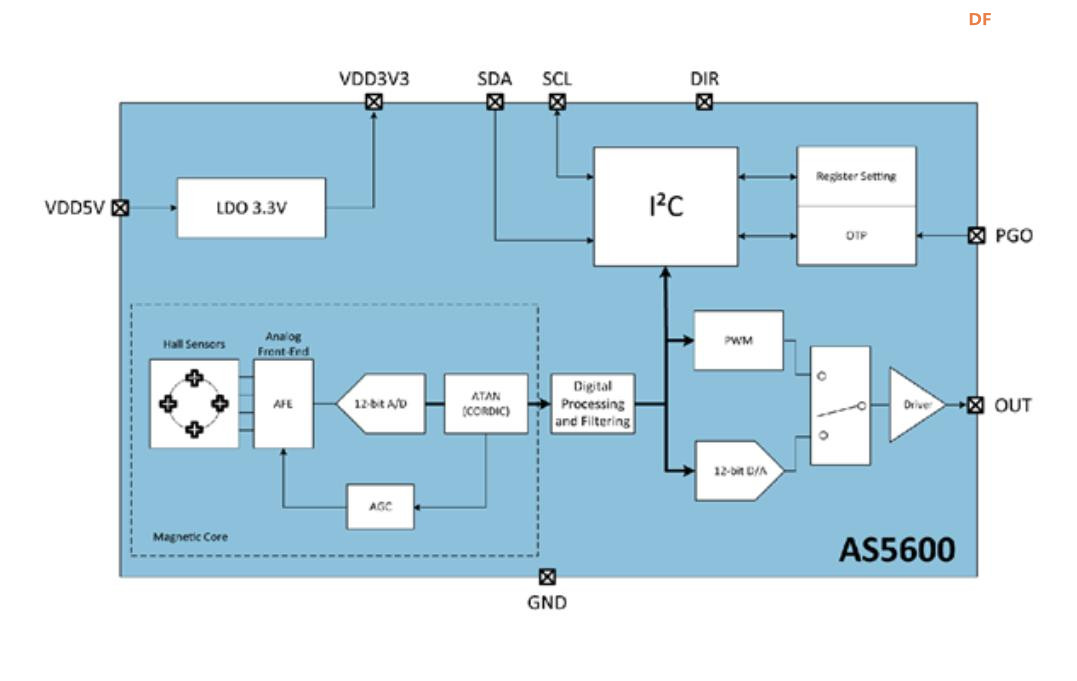








 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






