|
17240| 1
|
[项目] 秘法再用:L298N直流电机驱动模块DF-MD V1.3 mind+扩展库在仰..... |
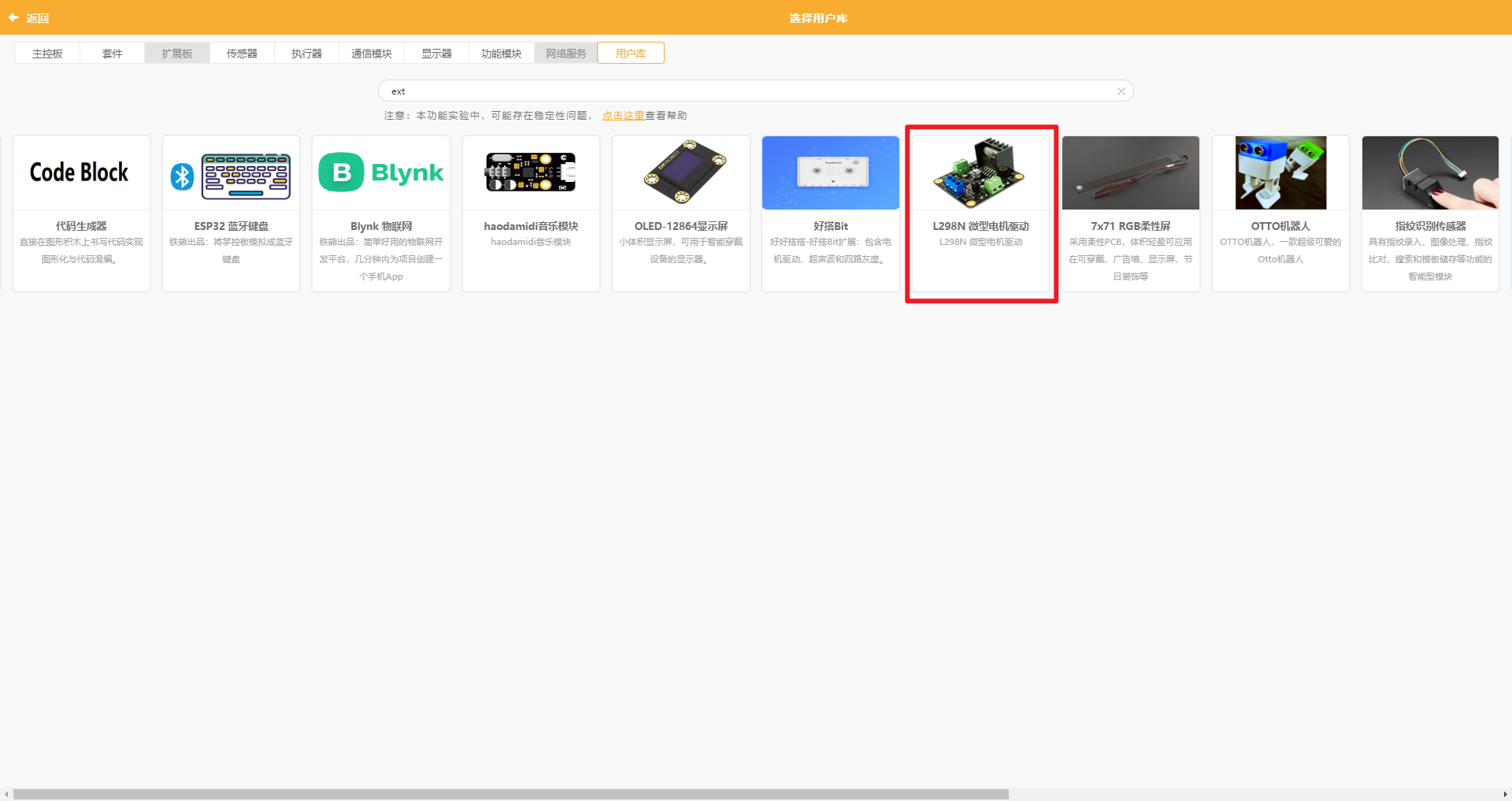
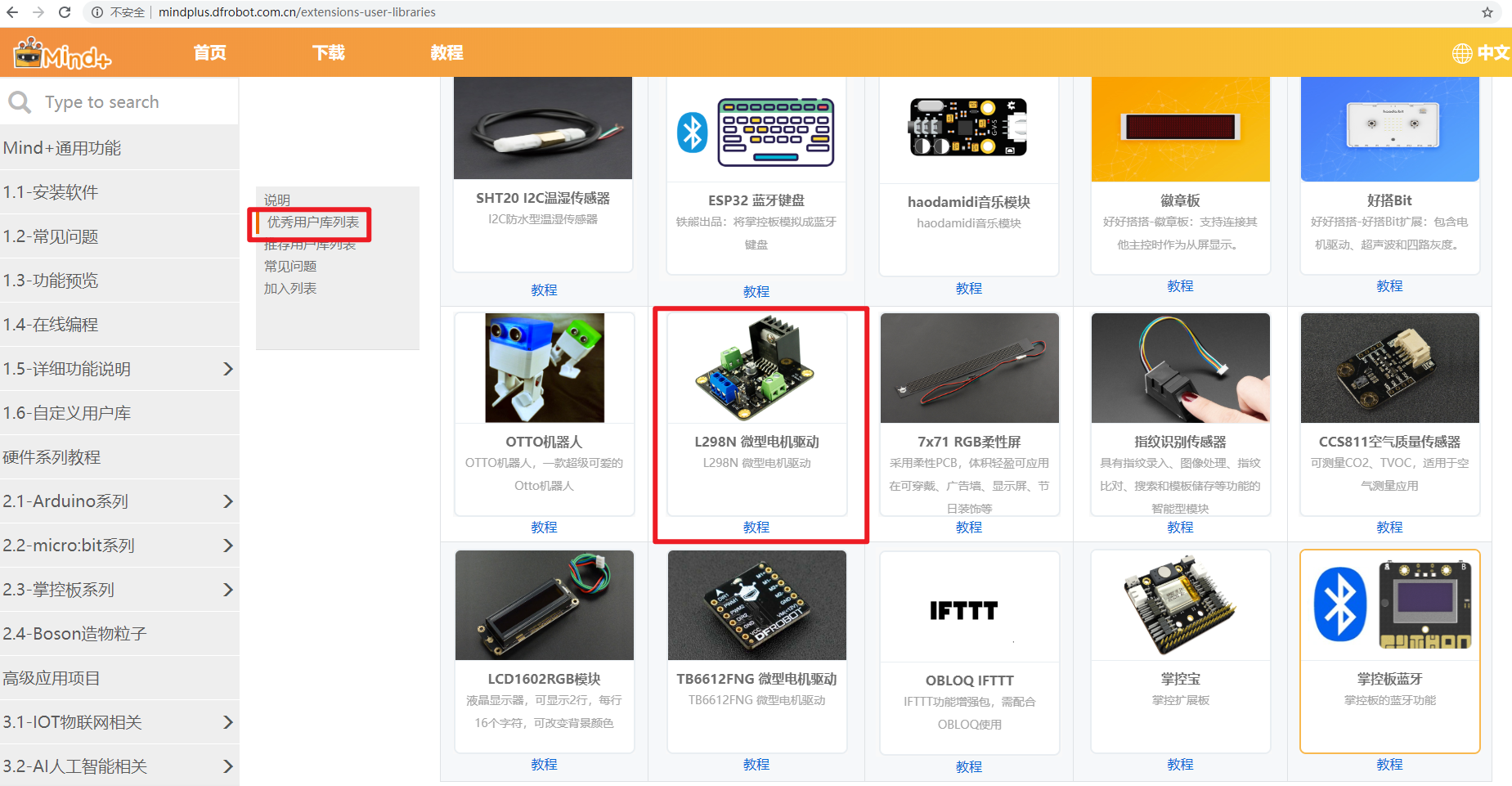
本帖最后由 rzyzzxw 于 2023-1-2 18:52 编辑 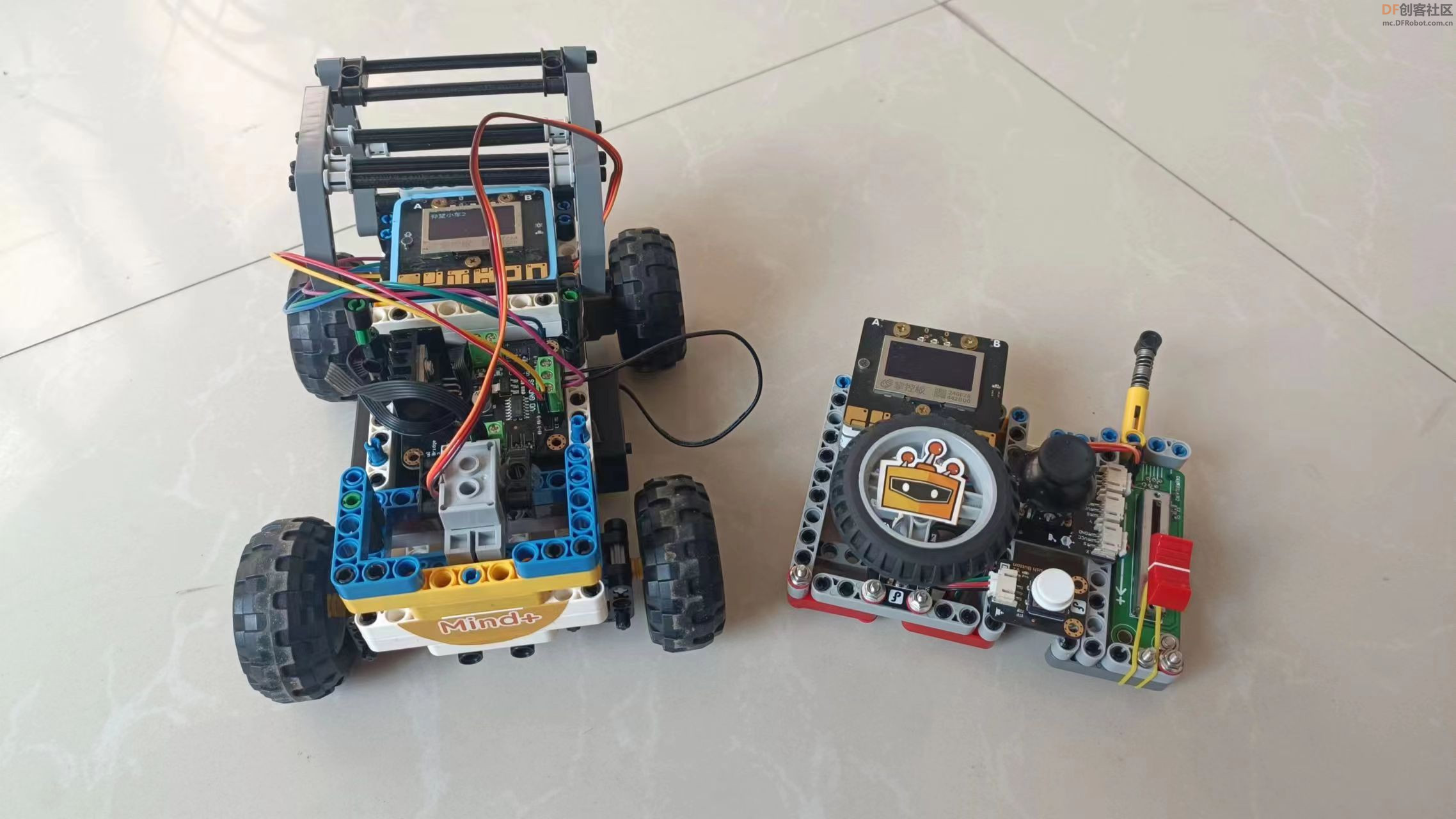 【主角】 这个帖子的主角是这个帅气的L298N直流电机驱动模块DF-MD V1.3模块: 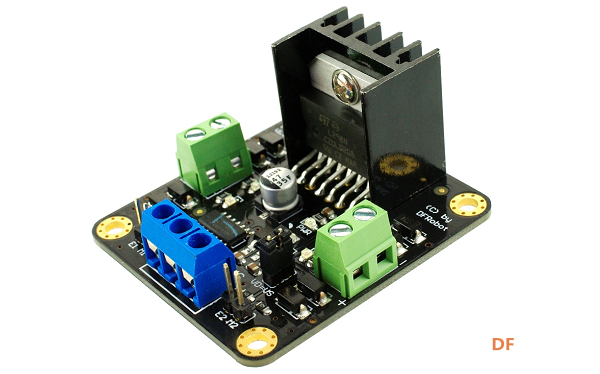 以及L298N直流电机驱动模块DF-MD V1.3模块的mind+扩展库:【Mind+扩展库发布】L298N直流电机驱动模块DF-MD V1.3https://mc.dfrobot.com.cn/thread-304803-1-1.html?fromuid=727937 (出处: DF创客社区 - 分享创造的喜悦) 【背景】 在上个帖子中发现了一个小秘密:L298N_红色直流电机驱动模块扩展库+掌控板在仰.... https://mc.dfrobot.com.cn/thread-315103-1-1.html?fromuid=727937 (出处: DF创客社区 - 分享创造的喜悦),所以我想前面测试中没能用起来的L298N直流电机驱动模块DF-MD V1.3模块的mind+扩展库是否也是同样秘密呢? 试试就知道了。 【测试】 1、下载及安装软件。下载地址:http://www.mindplus.cc 2、切换到“上传模式”。 3、“扩展”中选择“主控板”中的“掌控板”。 4、“扩展”中选择“用户库”:
  4、加载成功之后,双击加入,然后进行编程,程序如下图: 5、菜单栏“连接设备”,“上传到设备” 特别注意扩展库直接在掌控板上使用时只能让电机嗡嗡或者轻微转动。现在运用秘决:---手动编辑,将电机速度由0-255修改为0-1023中所需要速度就可以。 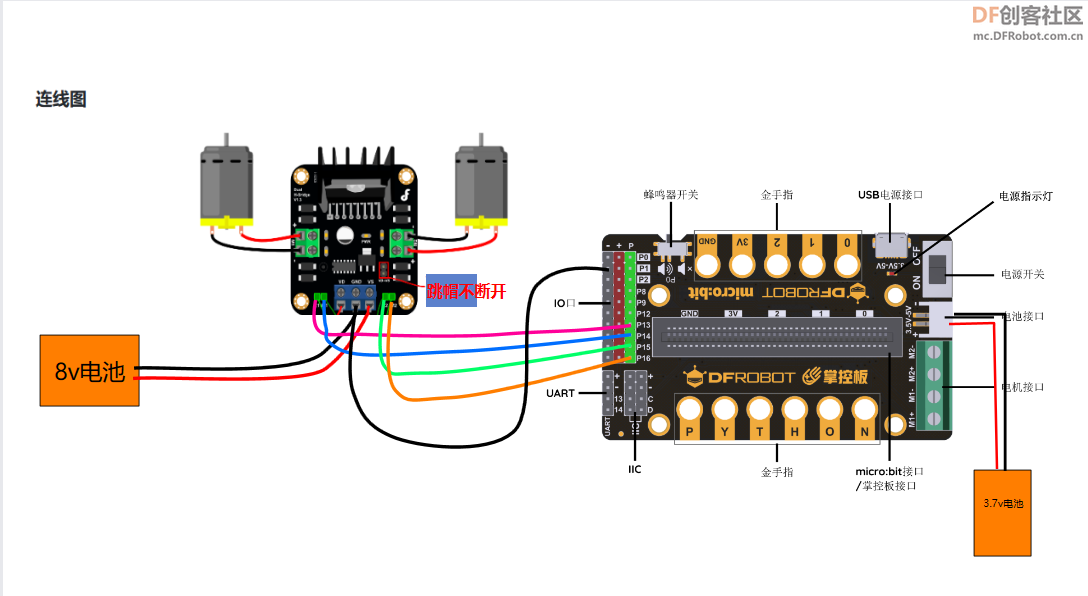 接线: 8V电池组 +极接驱动模块 VS -极接驱动模块 GND 电机 接驱动模块电机口M1和M2 不分正负 可以更换线头改变转向 (驱动模块VD=VS跳帽 不用取下) 驱动模块和掌控扩展板 E1 接 P13 M1 接 P14 E2 接 P15 M2 接 P16 特别提示 驱动模块和扩展板共地 用一根线将驱动模块GND和扩展板 - 引脚相连 扩展板用3.7V电池供电 测试1:M1电机正转(电机速度0-255,不能驱动电机) 写程序  在自动生成区右击--全选--复制 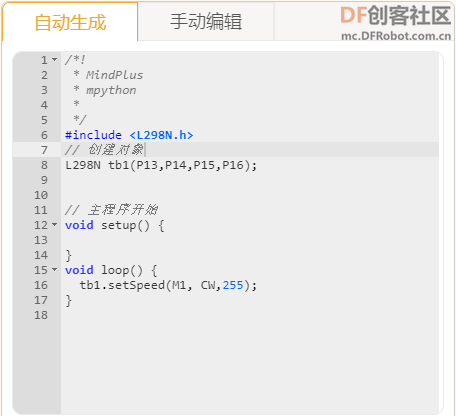 --在手动编辑区右击--粘贴--修改速度为1000--上传到掌控板,电机开始高速转动。 如果没有转动请检查控制线路是否正确,是否接触良好,电机驱动是否供电,驱动板与扩展板是否供电。 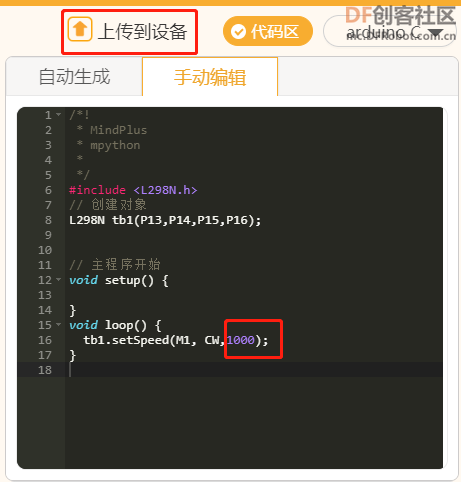 测试2:M1正转3秒,反转3秒,停1秒 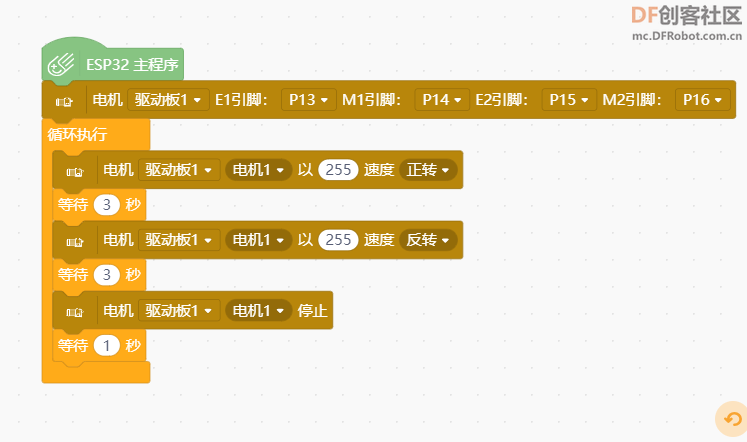 自动生成代码复制到手动编辑区,修改速度为正转1000,反转600。上传,测试通过。 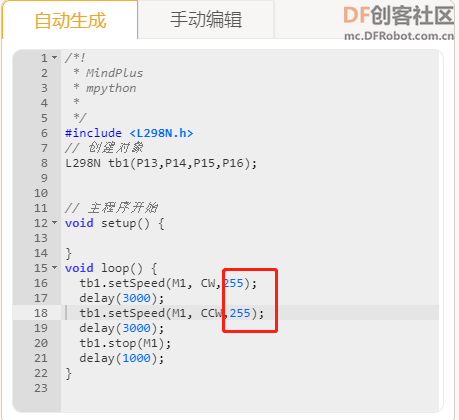  测试3:M2电机测试--自动生成代码复制到手动编辑区,修改速度为正转1000,反转600。上传,测试通过。 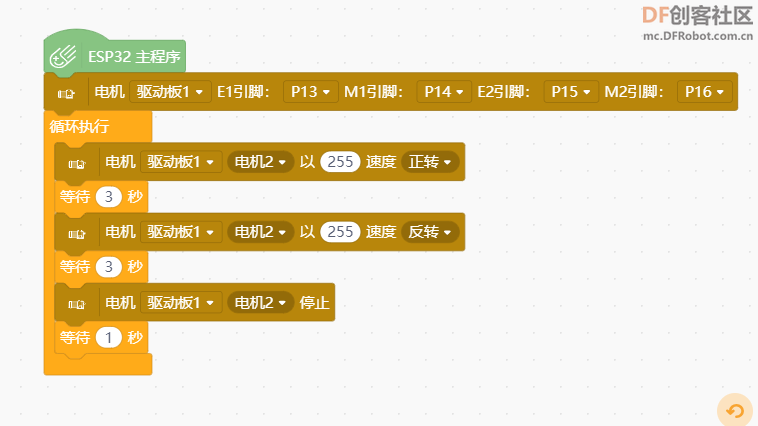 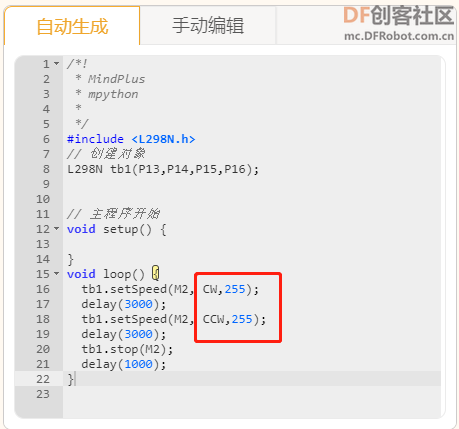  测试4:双电机测试--自动生成代码复制到手动编辑区,修改速度为正转1000,反转600。上传,测试通过。 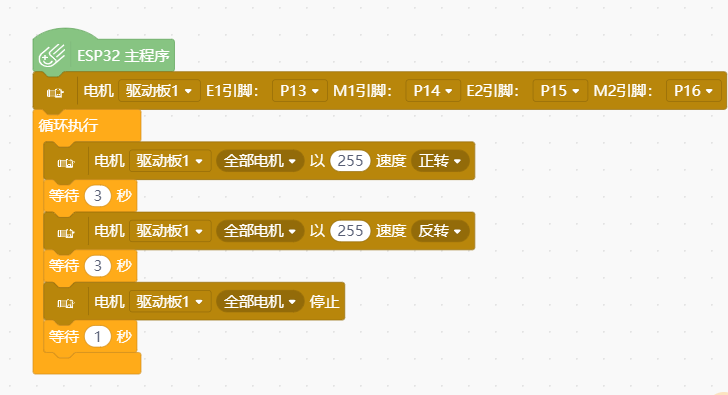 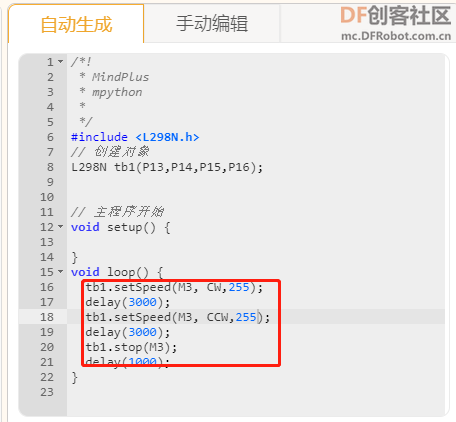  测试小结: 扩展库+掌控板应用,在图形化区写程序,交代码从自动生成区复制到手动编辑区修改电机速度范围为0-1023即可。 【仰望】 仰望2小车用L298N直流电机驱动模块DF-MD V1.3 mind+扩展库+掌控板及扩展板组成,先在图形化区写程序: (接线如上面接线图,扩展板P0接舵机,由掌控扩展板供电,电机由电机驱动模块8V电池供电) 小车程序:(这个程序直接上传实现不了小车功能。) 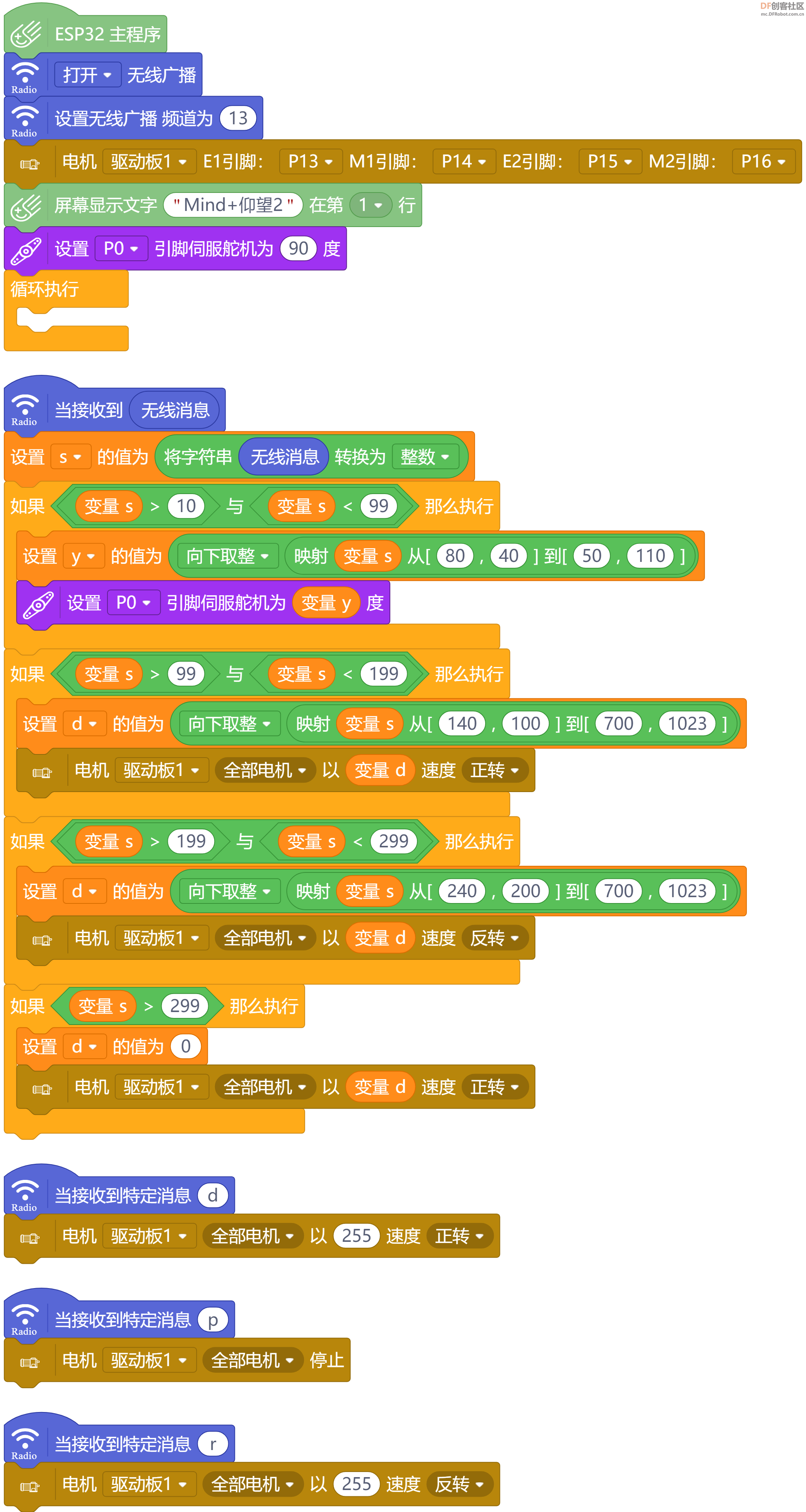 手动编辑 遥控器的程序和设备配置和前面帖子mind+版遥控程序一样。 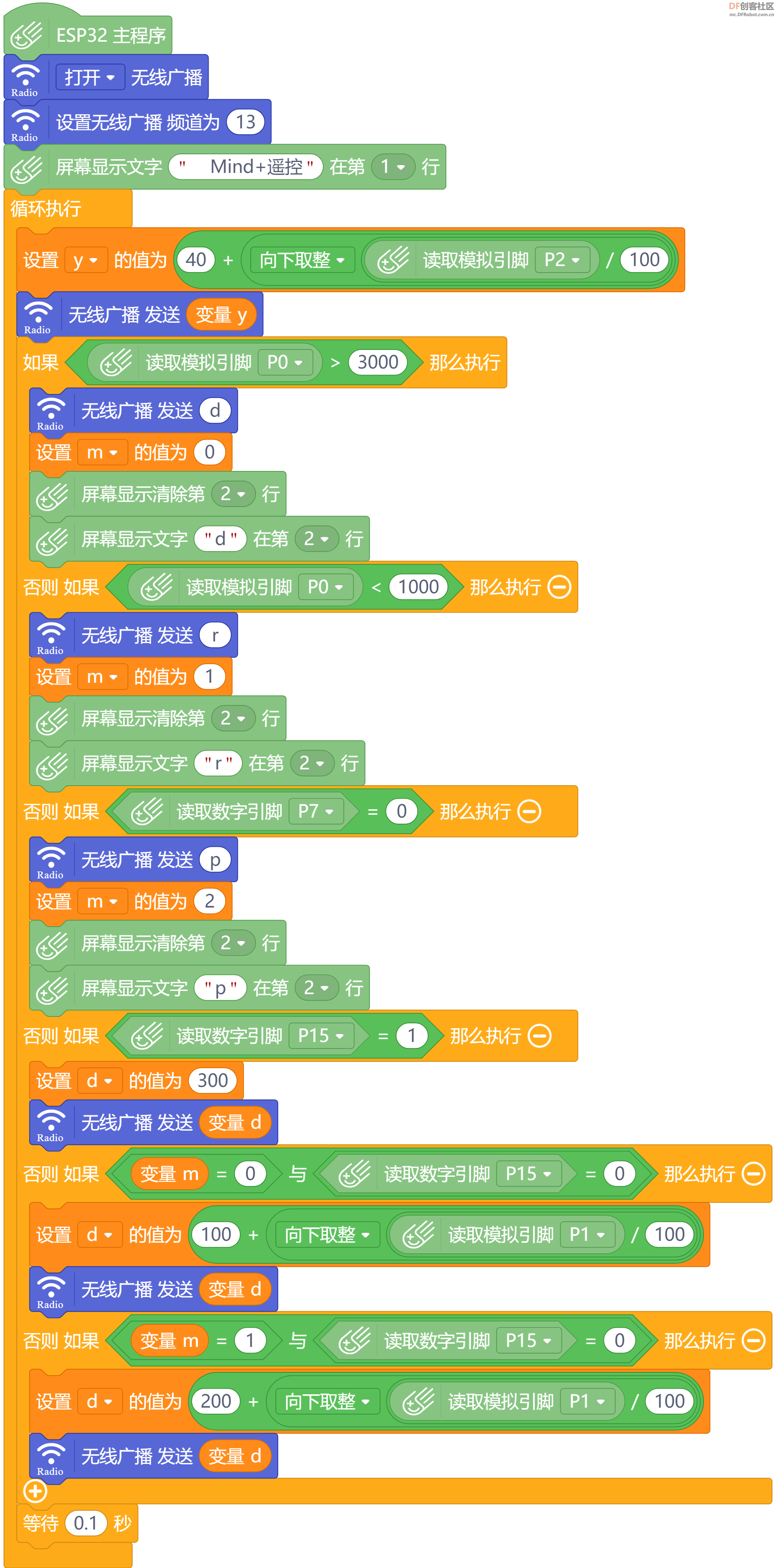 【小结】 aduino unor 电机速度范围0-255。 掌控板的电机速度范围0-1023。  仰望2DF电机驱动模块扩展库版.rar 仰望2DF电机驱动模块扩展库版.rar |
 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 活跃会员
活跃会员
 宣传大使
宣传大使
 版主限定
版主限定
 牛X认证
牛X认证
 老版主限定
老版主限定
 创作达人
创作达人
 小蘑菇
小蘑菇
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 物联网挑战
物联网挑战
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 创客造
创客造
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖









