项目代码
- #include <Servo.h>
- #include <SPI.h>
- #include "Ucglib.h"
-
-
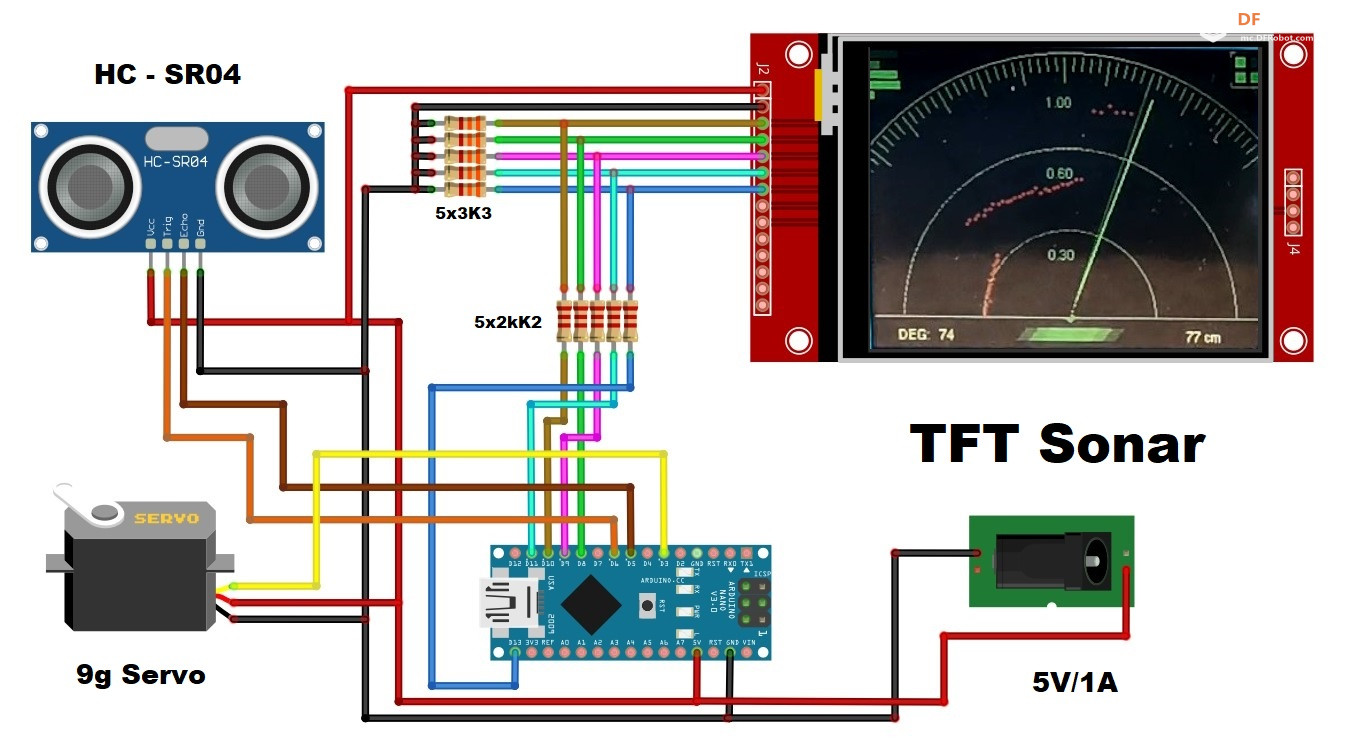
- #define trigPin 6
- #define echoPin 5
- #define ServoPin 3
- int Ymax = 240;
- int Xmax = 320;
-
- int Xcent = Xmax / 2;
- int base = 210;
- int scanline = 185;
-
- Servo baseServo;
- //Ucglib_ILI9341_18x240x320_SWSPI ucg(/*sclk=*/ 13, /*data=*/ 11, /*cd=*/ 9, /*cs=*/ 10, /*reset=*/ 8);
- Ucglib_ILI9341_18x240x320_HWSPI ucg(/*cd=*/ 9, /*cs=*/ 10, /*reset=*/ 8);
-
- void setup(void)
- {
-
- ucg.begin(UCG_FONT_MODE_SOLID);
- ucg.setRotate90();
-
- pinMode(trigPin, OUTPUT);
- pinMode(echoPin, INPUT);
- Serial.begin(115200);
- baseServo.attach(ServoPin);
-
-
- ucg.setFontMode(UCG_FONT_MODE_TRANSPARENT);
- ucg.setColor(0, 0, 100, 0);
- ucg.setColor(1, 0, 100, 0);
- ucg.setColor(2, 20, 20,20);
- ucg.setColor(3, 20, 20, 20);
- ucg.drawGradientBox(0, 0, 320, 240);
- ucg.setPrintDir(0);
- ucg.setColor(0, 5, 0);
- ucg.setPrintPos(70,120);
- ucg.setFont(ucg_font_logisoso32_tf);
- ucg.print("Mini Radar");
- ucg.setColor(0, 255, 0);
- ucg.setPrintPos(70,120);
- ucg.print("Mini Radar");
- ucg.setFont(ucg_font_courB14_tf);
- ucg.setColor(20, 255, 20);
- ucg.setPrintPos(90,200);
- ucg.print("Testing...");
- baseServo.write(90);
-
-
- for(int x=0;x<180;x+=5)
- { baseServo.write(x);
- delay(50);
- }
- ucg.print("OK!");
- delay(500);
- ucg.setColor(0,0, 0, 0);
- ucg.setColor(1,0, 0, 0);
- ucg.setColor(2,0, 0, 0);
- ucg.setColor(3,0, 0, 0);
- ucg.drawGradientBox(0, 0, 320, 240);
- delay(10);
-
-
- //ucg.clearScreen();
- cls();
- ucg.setFontMode(UCG_FONT_MODE_SOLID);
- ucg.setFont(ucg_font_helvR08_hr); // or freedoomr10_tr
-
- }
-
-
- void cls()
- {
-
- ucg.setColor(0, 0, 0, 0);
- for(int s=0;s<240;s++)
- {
- ucg.drawHLine(0,s,320);
- delay(1);
- }
-
- //ucg.drawBox(0, 0, 160, 60);
-
- }
-
-
- int calculateDistance()
- {
- long duration;
-
- digitalWrite(trigPin, LOW);
- delayMicroseconds(2);
-
- digitalWrite(trigPin, HIGH);
- delayMicroseconds(10);
- digitalWrite(trigPin, LOW);
-
- duration = pulseIn(echoPin, HIGH);
-
- return duration*0.034/2;
- }
-
- void fix_font()
- {
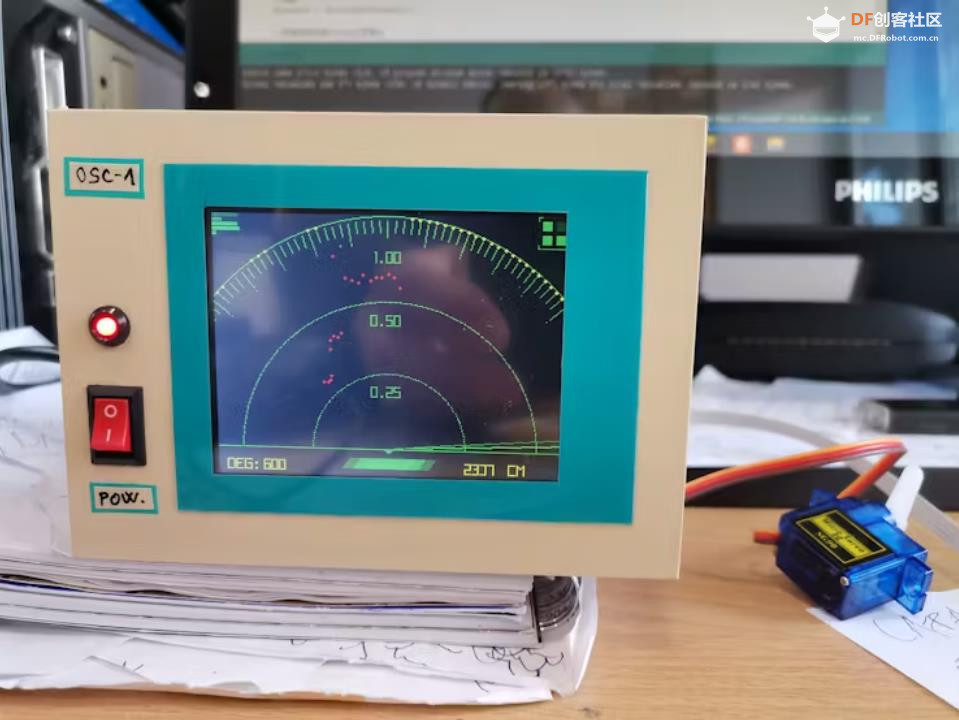
- ucg.setColor(0, 180, 0);
- ucg.setPrintPos(144,44);
- ucg.print("1.00");
- ucg.setPrintPos(144,100);
- ucg.print("0.60");
- ucg.setPrintPos(144,165);
- ucg.print("0.30");
- }
-
- void fix()
- {
-
- ucg.setColor(0, 180, 0);
-
- ucg.drawDisc(Xcent, base+1, 3, UCG_DRAW_ALL);
- ucg.drawCircle(Xcent, base+1, 210, UCG_DRAW_UPPER_LEFT);
- ucg.drawCircle(Xcent, base+1, 210, UCG_DRAW_UPPER_RIGHT);
- ucg.drawCircle(Xcent, base+1, 135, UCG_DRAW_UPPER_LEFT);
- ucg.drawCircle(Xcent, base+1, 135, UCG_DRAW_UPPER_RIGHT);
- ucg.drawCircle(Xcent, base+1, 70, UCG_DRAW_UPPER_LEFT);
- ucg.drawCircle(Xcent, base+1, 70, UCG_DRAW_UPPER_RIGHT);
- ucg.drawLine(0, base+1, Xmax,base+1);
-
- ucg.setColor(0, 180, 0);
-
- for(int i= 40;i < 300; i+=2)
- {
-
- if (i % 10 == 0)
- ucg.drawLine(185*cos(radians(i))+Xcent,base - 185*sin(radians(i)) , 205*cos(radians(i))+Xcent,base - 205*sin(radians(i)));
-
- else
-
- ucg.drawLine(195*cos(radians(i))+Xcent,base - 195*sin(radians(i)) , 205*cos(radians(i))+Xcent,base - 205*sin(radians(i)));
-
- }
-
-
- ucg.setColor(0,200,0);
- ucg.drawLine(0,0,0,36);
- for(int i= 0;i < 5; i++)
- {
- ucg.setColor(0,random(200)+50,0);
- ucg.drawBox(2,i*8,random(28)+3,6);
- }
-
- ucg.setColor(0,180,0);
- ucg.drawFrame(292,0,28,28);
- ucg.setColor(0,60,0);
- ucg.drawHLine(296,0,20);
- ucg.drawVLine(292,4,20);
- ucg.drawHLine(296,52,20);
- ucg.drawVLine(318,4,20);
-
- ucg.setColor(0,220,0);
- ucg.drawBox(296,4,8,8);
- ucg.drawBox(296,16,8,8);
- ucg.drawBox(308,16,8,8);
- ucg.setColor(0,100,0);
- ucg.drawBox(308,4,8,8);
-
- ucg.setColor(0,90,0);
- ucg.drawTetragon(124,220,116,230,196,230,204,220);
- ucg.setColor(0,160,0);
- ucg.drawTetragon(134,220,126,230,186,230,194,220);
- ucg.setColor(0,210,0);
- ucg.drawTetragon(144,220,136,230,176,230,184,220);
- }
-
-
-
- void loop(void)
- {
-
- int distance;
-
- fix();
- fix_font();
-
- for (int x=180; x > 4; x-=2){
-
- baseServo.write(x);
-
-
- int f = x - 4;
- ucg.setColor(0, 255, 0);
- ucg.drawLine(Xcent, base, scanline*cos(radians(f))+Xcent,base - scanline*sin(radians(f)));
- f+=2;
- ucg.setColor(0, 128, 0);
- ucg.drawLine(Xcent, base, scanline*cos(radians(f))+Xcent,base - scanline*sin(radians(f)));
- f+=2;
- ucg.setColor(0, 0, 0);
- ucg.drawLine(Xcent, base, scanline*cos(radians(f))+Xcent,base - scanline*sin(radians(f)));
- ucg.setColor(0,200, 0);
-
- distance = calculateDistance();
-
-
- if (distance < 100)
- {
- ucg.setColor(255,0,0);
- ucg.drawDisc(2.2*distance*cos(radians(x))+ Xcent,-2.2*distance*sin(radians(x))+base, 1, UCG_DRAW_ALL);
- }
- else
- {
- ucg.setColor(255,255,0);
- ucg.drawDisc(208*cos(radians(x))+Xcent,-208*sin(radians(x))+base, 1, UCG_DRAW_ALL);
- }
-
-
-
- Serial.print(x);
- Serial.print(" , ");
- Serial.println(distance);
-
-
- if (x > 70 and x < 110) fix_font();
-
-
- ucg.setColor(255,255, 0);
- ucg.setPrintPos(20,230);
- ucg.print("DEG: ");
- ucg.setPrintPos(54,230);
- ucg.print(x);
- ucg.print(" ");
- ucg.setPrintPos(240,230);
- ucg.print(" ");
- ucg.print(distance);
- ucg.print(" cm ");
-
- }
- //ucg.clearScreen();
- delay(50);
- cls();
-
- fix();
- fix_font();
-
- for (int x=1; x < 176; x+=2){
- baseServo.write(x);
-
-
- int f = x + 4;
- ucg.setColor(0, 255, 0);
- ucg.drawLine(Xcent, base, scanline*cos(radians(f))+Xcent,base - scanline*sin(radians(f)));
- f-=2;
- ucg.setColor(0, 128, 0);
- ucg.drawLine(Xcent, base, scanline*cos(radians(f))+Xcent,base - scanline*sin(radians(f)));
- f-=2;
- ucg.setColor(0, 0, 0);
- ucg.drawLine(Xcent, base, scanline*cos(radians(f))+Xcent,base - scanline*sin(radians(f)));
- ucg.setColor(0, 200, 0);
-
- distance = calculateDistance();
-
-
- if (distance < 100)
- {
- ucg.setColor(255,0,0);
- ucg.drawDisc(2.2*distance*cos(radians(x))+Xcent,-2.2*distance*sin(radians(x))+base, 1, UCG_DRAW_ALL);
- }
- else
- {
- ucg.setColor(255,255,0);
- ucg.drawDisc(208*cos(radians(x))+Xcent,-208*sin(radians(x))+base, 1, UCG_DRAW_ALL);
- }
-
-
- Serial.print(x);
- Serial.print(" , ");
- Serial.println(distance);
-
- if (x > 70 and x < 110) fix_font();
-
- ucg.setColor(255,255, 0);
- ucg.setPrintPos(20,230);
- ucg.print("DEG: ");
- ucg.setPrintPos(54,230);
- ucg.print(x);
- ucg.print(" ");
- ucg.setPrintPos(240,230);
- ucg.print(" ");
- ucg.print(distance);
- ucg.print(" cm ");
-
- }
- //ucg.clearScreen(); //
- delay(50);
- cls();
-
- }
|







 沪公网安备31011502402448
沪公网安备31011502402448
 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






