|
1463| 3
|
[项目] 【Arduino 动手做】Klann Linkage:3D 打印步行机器人 |
|
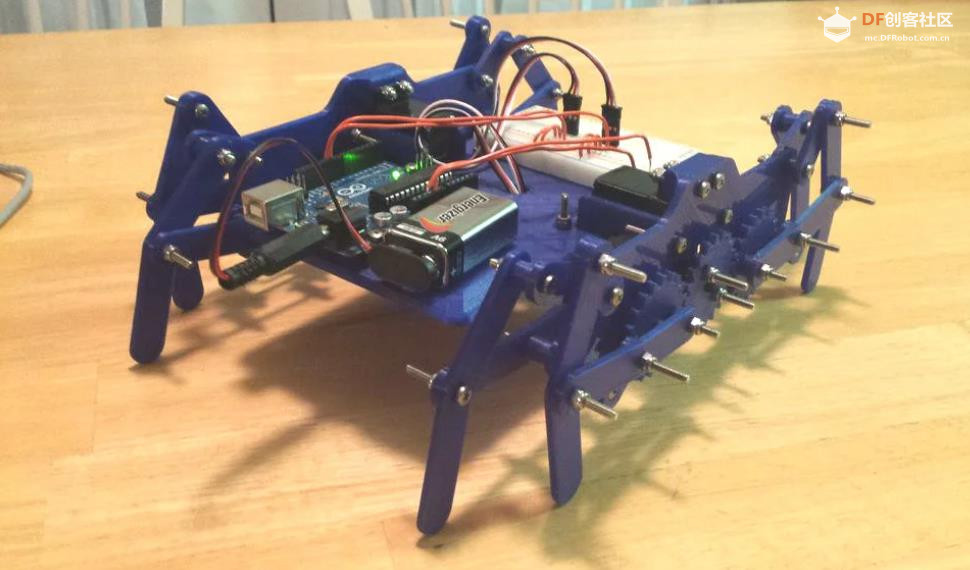
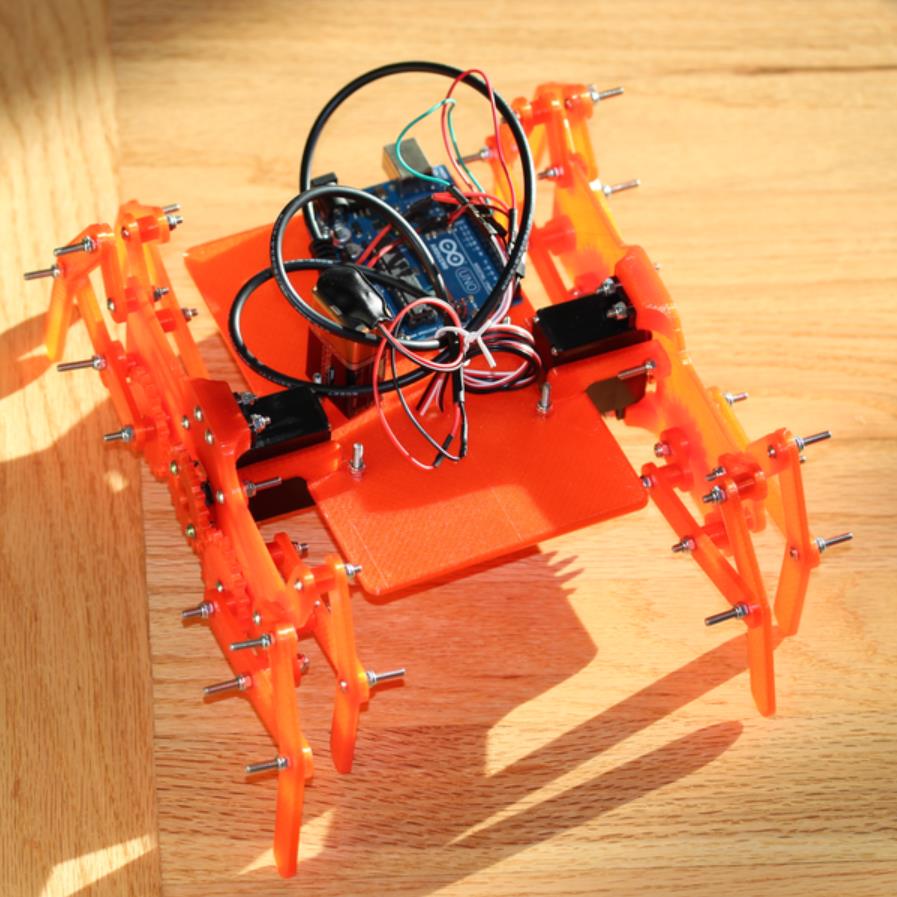
这个步行机器人是我一直想尝试的项目,我终于有时间完成了它,所以现在我与世界分享它! 这个项目的构建相当简单,不需要任何困难的技能或大型工具(除了 3D 打印机)。9V 电池夹与同轴插头的焊接量很小,但仅此而已。 它全部由我拥有的两个连续旋转伺服系统提供动力,它们由 Arduino Uno 控制,它可以极大地扩展机器人的功能,超出此 Instructable 中显示的功能,并带有一些插件。 这也是我的第一个 Instructable!因此,如果您对如何改进此 Instructable 或我将来制作的 Instructables 有任何评论,请告诉我。 第 1 步:您需要什么 所需条件 我围绕着我周围的零件设计了这个机器人,我在下面列出了这些零件。您可能可以用其他部分替换其中一些部分。我已在此 Instructable 中附加了每个部分的 3D 模型,以便您可以根据自己的喜好对其进行修改。 硬件 M3x20螺丝(~70x) -- (McMaster-Carr) M3锁螺母(~70x) -- (McMaster-Carr) 电子 Arduino Uno -- (Amazon) 连续旋转伺服器(2x) -- (视差) 无焊面包板 -- (所有电子产品) 9V电池 9V电池卡扣 -- (所有电子产品) 跳线 -- (所有电子产品)我只是使用了我身边的一卷实心连接线。 1x40 接头 -- (所有电子元件) 2.1mm Co-Ax 电源插头 -- (所有电子元件) 工具 螺丝刀 3D 打印机* 带焊料的烙铁(参见步骤 10,可能没有必要) *如果您没有 3D 打印机,您可以让其他人为您打印。例如 3DHubs 或 Ponoko 当然,在这些东西中,您还需要 3D 打印部件,这些部件在第 3 步中提供。 第 2 步:联系 这个机器人中使用的链接被称为 Joe Klann 创建的 Klann 链接,您可以在 http://www.mechanicalspider.com 上找到有关他的链接的大量信息。我在 BEST 机器人比赛中的一位导师向我介绍了 Klann 联动装置(在此处查看他自己的机器人使用此联动装置),由于事实证明它太复杂了,无法用我们有限的材料和时间制作,因此我们无法在我们的机器人中使用它。比赛结束后,我决定尝试使用这种连杆机构制作自己的机器人。 我对如何创建自己的 Boss 进行了更多的研究。但我也发现,没有很多说明或预制模型供机器人自己制作。所以我想为什么不做一个,然后把说明发给任何想做的人呢。 该链接是完全可定制的,并且可以使用此处的启用文本在任何 2D 草图绘制工具上进行设计。如果连杆的规模很小,我不建议在纸上手工设计一个,因为一些点可以非常接近。 我在 Solidworks 中创建了我的链接,并附上了每个零件的 3D 模型,如果您想根据自己的需要对其进行自定义。 附件 下载 {{ file.name }}SolidWorksModels.zip下载 下载 {{ file.name }}WalkingRobot_IGESPack.zip下载 第 3 步:打印零件 打印部件时没有任何特殊要求。但以下是我用于打印我的一些参数: 切片机:MatterSlice 层高:.25mm 材质:PLA 以下是您需要的每个零件的数量。 机器人的核心: 1x 平台 2x LinkageConnector 2x LinkageFrame 4x ArduinoStandoffs 注意:每个 LinkageFrame 都有 2 个镜像的链接集。 对于一个连杆组,您需要: 2x 腿 2x PowerLink 2x TopRocker 1x 底部摇杆 1x 底部摇杆内 1x 惰轮 1x 齿轮 1x 曲柄 3x 7mm 垫片 1x 9mm 垫片 2x 4mm 垫片 2x 3mm 垫片 附件 下载 {{ file.name }}WalkingRobotSTLPack.zip下载 第 4 步:连杆组件:检查惰轮配合 连杆组件:检查惰轮配合 检查以确保惰轮适合并且可以自由旋转,而不会在连杆框架的插槽中晃动。根据您的打印件,您可能需要从插槽中切掉一点塑料,以获得惰轮的平稳旋转。 用螺钉和锁紧螺母组装连杆机构时,要确保不要将接头拧得过紧。您希望每个关节都能轻松移动,不要太粘也不要太松。 第 5 步:连杆组件:组装支腿和 PowerLink 接下来,将连杆框架的外侧和内侧的支腿和动力链杆组装在一起。连接时,请记住将支腿放在 Powerlink 后面。 第 6 步:连杆组件:顶部和底部摇杆 连杆组件:顶部和底部摇臂 连杆组件:顶部和底部摇臂 将顶部和底部摇键连接到各自的支腿和 Powerlink 组件上。 内部底部摇臂只有一个用于螺钉的埋头孔,而另一个用于外部的底部摇臂将有两个埋头孔。 内部底部摇杆与 Powerlink 由 9 毫米垫片隔开。顶部内侧摇杆与支腿之间由 7 毫米垫片隔开。 第 7 步:连杆组件:连接齿轮和曲柄 将齿轮和曲柄连接到各自的连杆组件上。齿轮与 powerlink 由 4 mm 垫片隔开,曲柄与 Powerlink 由 7 mm 垫片隔开。 第 8 步:Linakge 组件:将连杆拧紧在一起 将顶部和底部摇杆连接到框架上,并将螺钉从外部连杆插入,将两个连杆连接到连杆框架。外部连杆机构的底部摇杆和顶部摇杆由用于底部摇杆的 7 毫米垫片和用于顶部摇杆的 4 毫米垫片与框架隔开。 接下来,首先将惰轮放入槽中,用 3 毫米垫片将齿轮和曲柄与惰轮和框架分开,每侧一个,将两个连杆系在一起。为了将它们放在一起,用螺栓和锁紧螺母拧紧整个车轴组件(齿轮->3mm垫片->惰轮->3mm垫片->曲柄),这样当齿轮旋转时,曲柄也会旋转,使它们合二为一。 将它们拧紧在一起时,请确保曲柄和齿轮的方向如图所示。因此,在 powerlink 连接到齿轮的位置,位置正对着内部连杆的 powerlink 连接到曲柄的位置。 完成所有作后,您现在已经完成了一套连杆,并且可以在连杆框架的另一侧工作。步骤都是一样的,唯一的区别是它是镜像的。 第 9 步:将它们放在一起 用 4 个螺钉将伺服器连接到每个连杆框架上。 如图所示,两个连杆框架与两个联动连接器连接,平台连接到联动连接器。 伺服喇叭和齿轮 伺服器随附的 4 臂伺服喇叭可以正常工作,但您需要夹住尖端才能正常工作。如果你有一个圆形的伺服喇叭,那也会很好用。如图所示,中心齿轮和伺服喇叭用 2 个螺钉固定。 注意:在将伺服喇叭和齿轮连接到伺服器之前,请确保框架两侧的齿轮对齐,以便在放置齿轮和伺服喇叭时它们相对于其方向的位置相同。还要确保在放入两个中心齿轮时,左侧和右侧也处于相同的方向。 警告:与任何机器人一样,请小心齿轮等运动部件。当我把手指放在错误的地方捡起来时,我捏了自己一两次,而它还在移动。 第 10 步:电子和编程 电子学 电子设备非常简单,只需将相应的电线连接到相应的伺服器上,依此类推。伺服连接器还需要一个 1x3 接头,以将它们连接到无焊试验板。只需断开一小部分并连接即可。 需要注意的一点是,机器人实际上没有任何正确的方向。因此,您可以将您想要的任何一端作为正面,只需记住更改舵机连接的引脚号(如果更改)即可。 使用您自己的支架将 Arduino 连接到平台,或从提供的文件中 3D 打印您自己的支架。 如图所示,将 9V 电池夹焊接到同轴插头的正确引线上。您不一定需要使用同轴电缆为所有设备供电。如果您愿意,您可以通过板上的 GND 和 Vin 引脚为其供电。 编程 编程并不多,只有 Arduino Uno 和伺服系统,您就非常局限于它自己转向。要对机器人进行编程,只需在循环中键入您希望它执行的移动,然后是您希望它执行该移动的一定时间延迟。 大功告成! 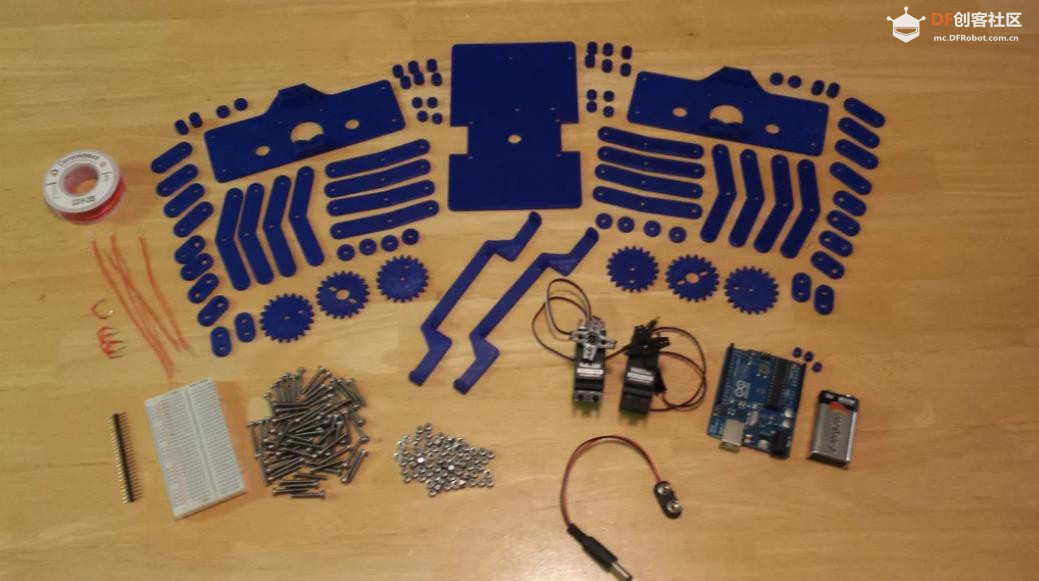 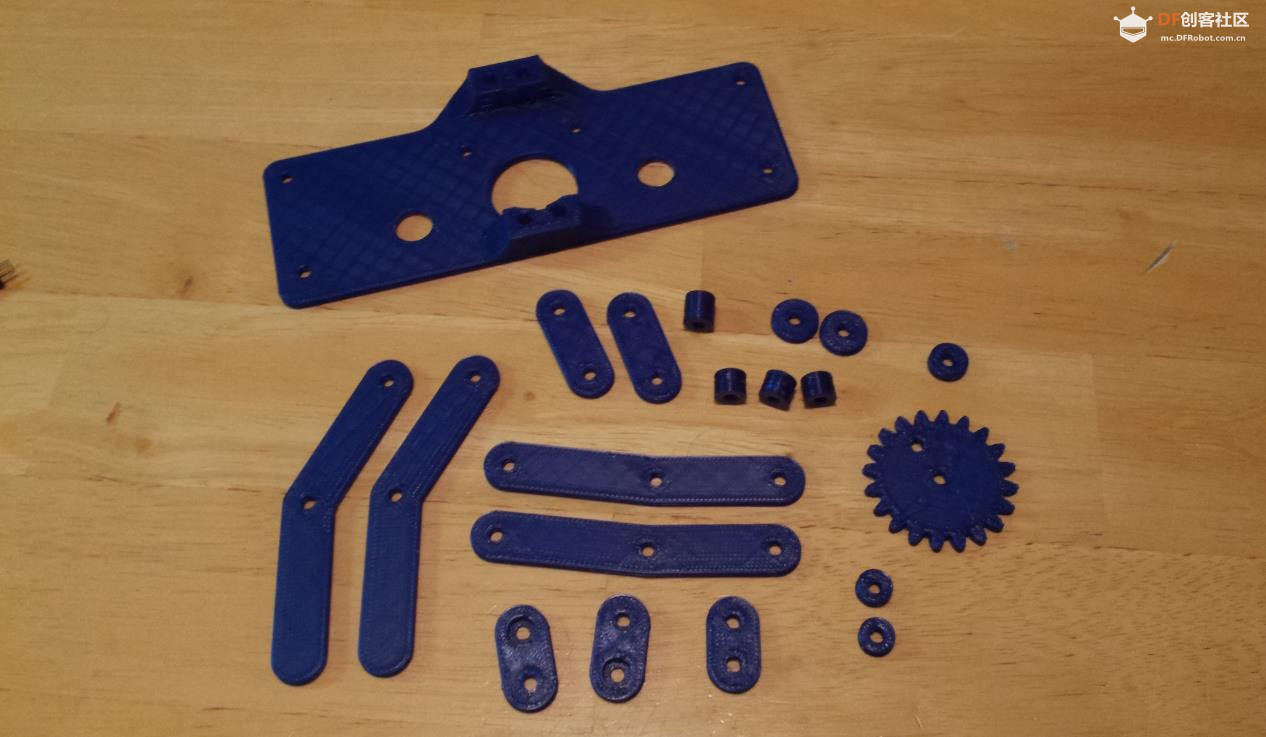 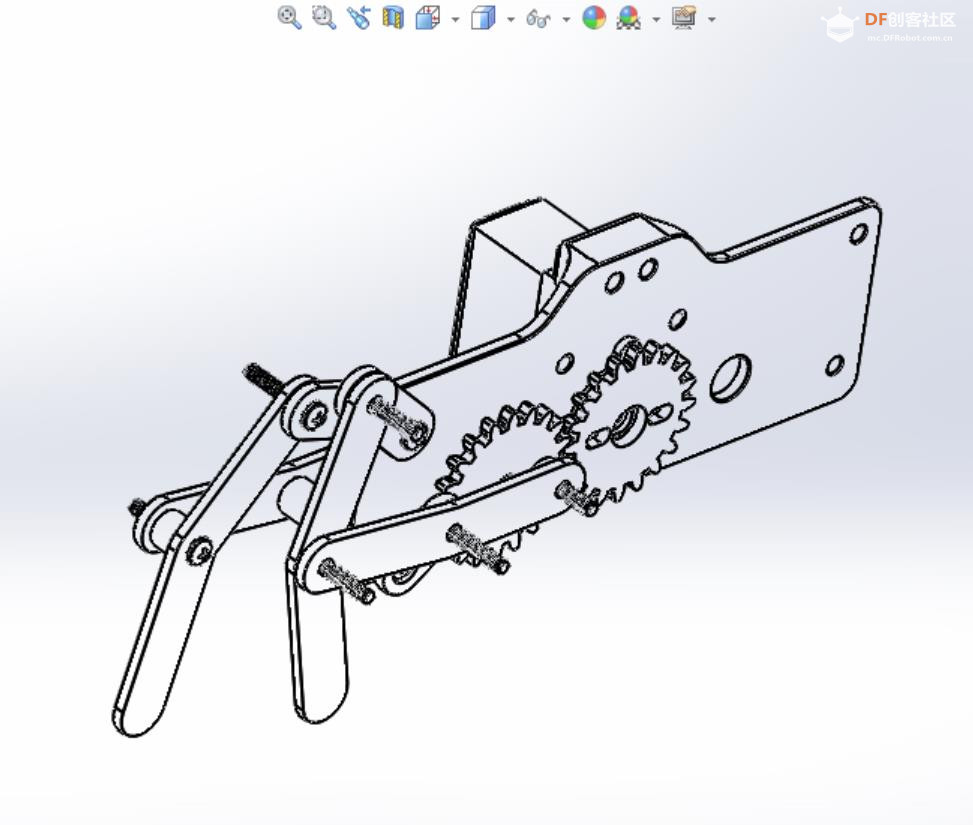 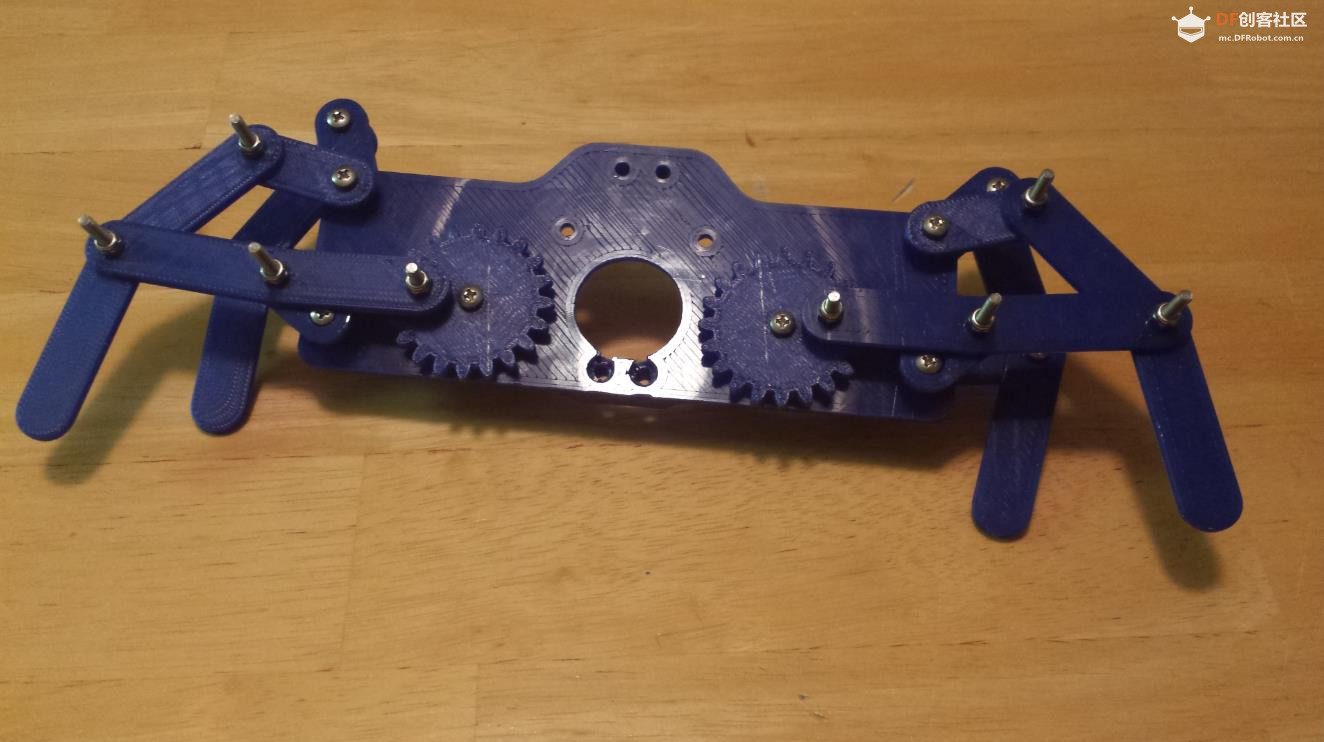 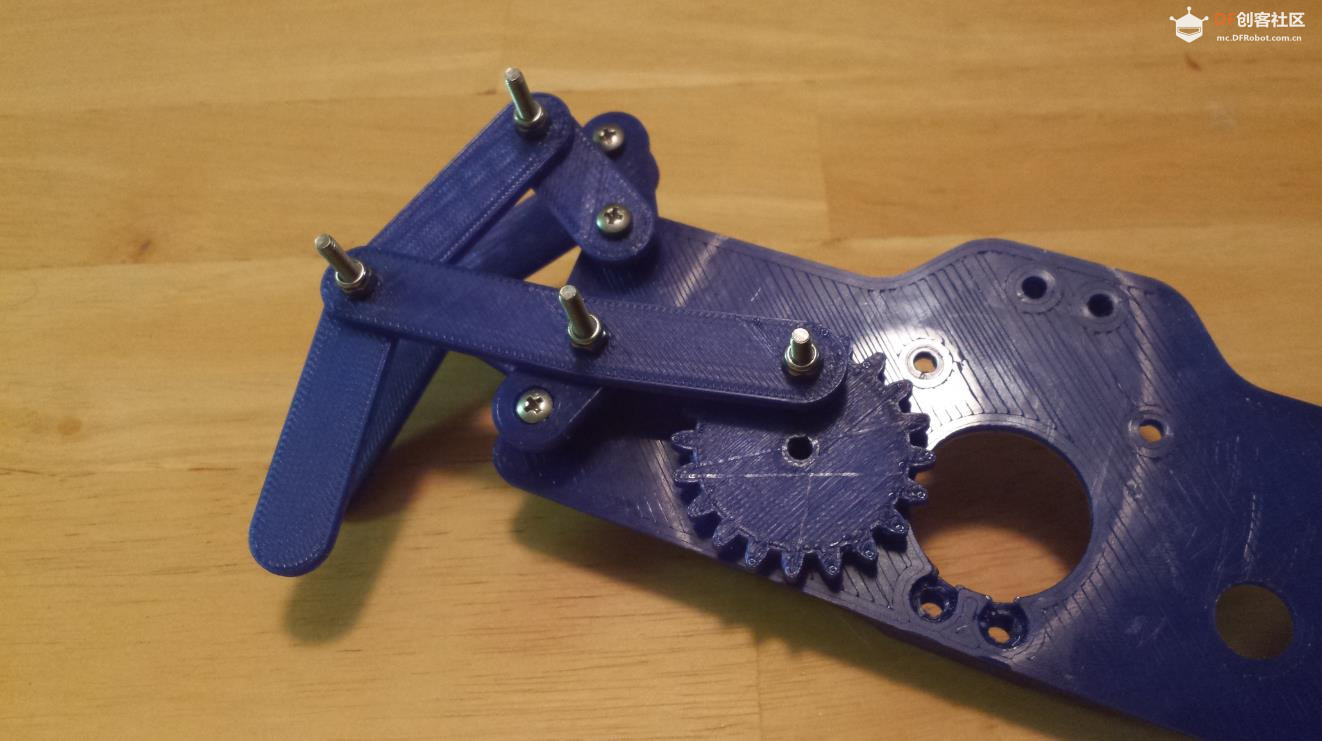 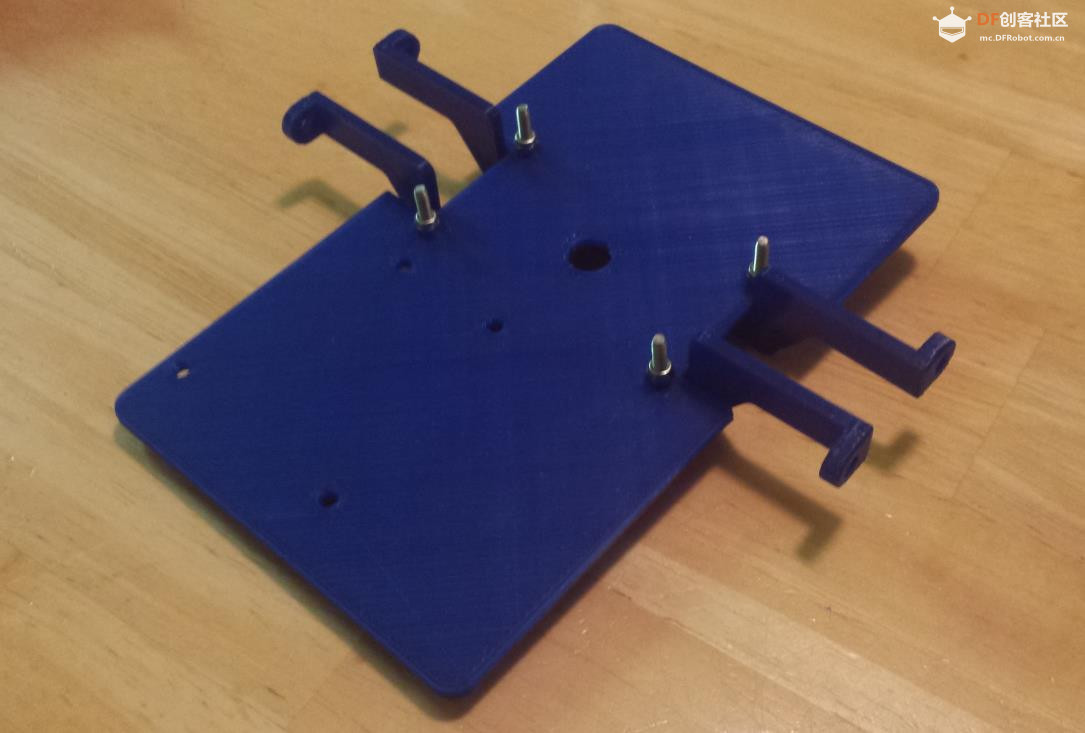 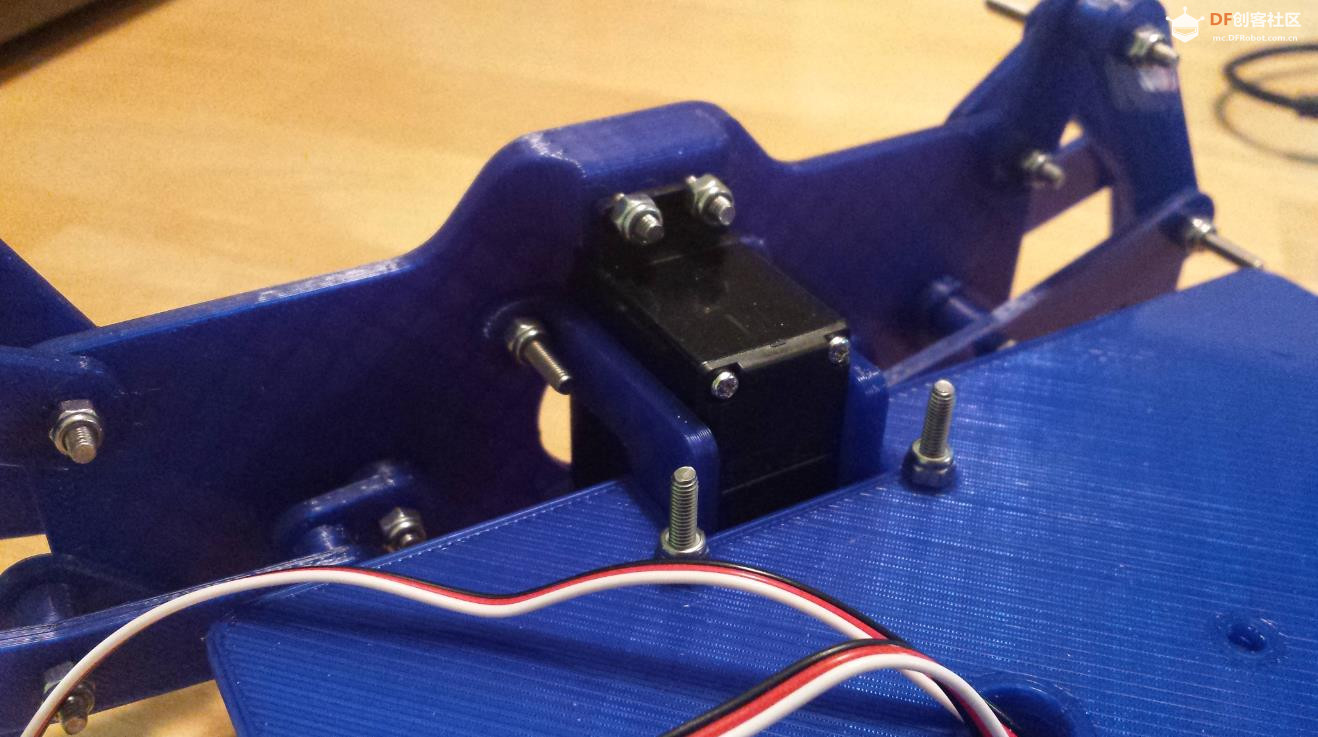 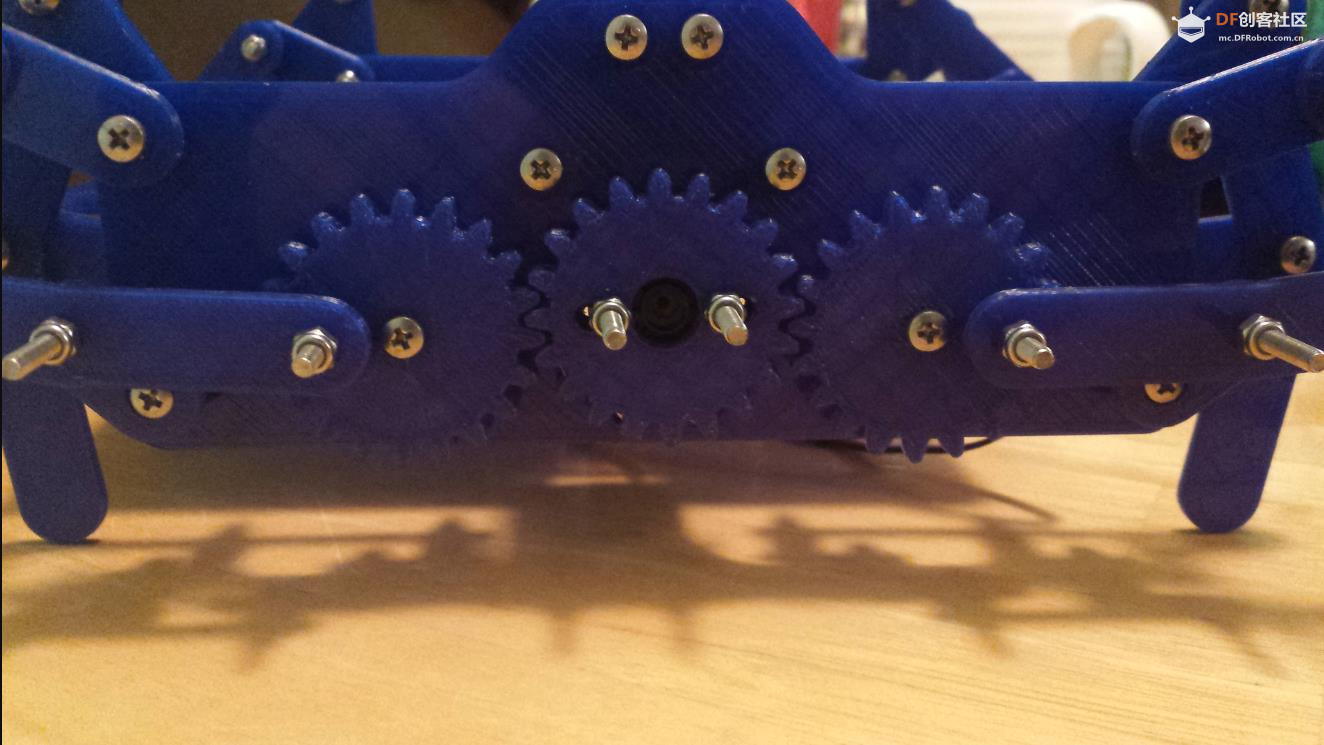 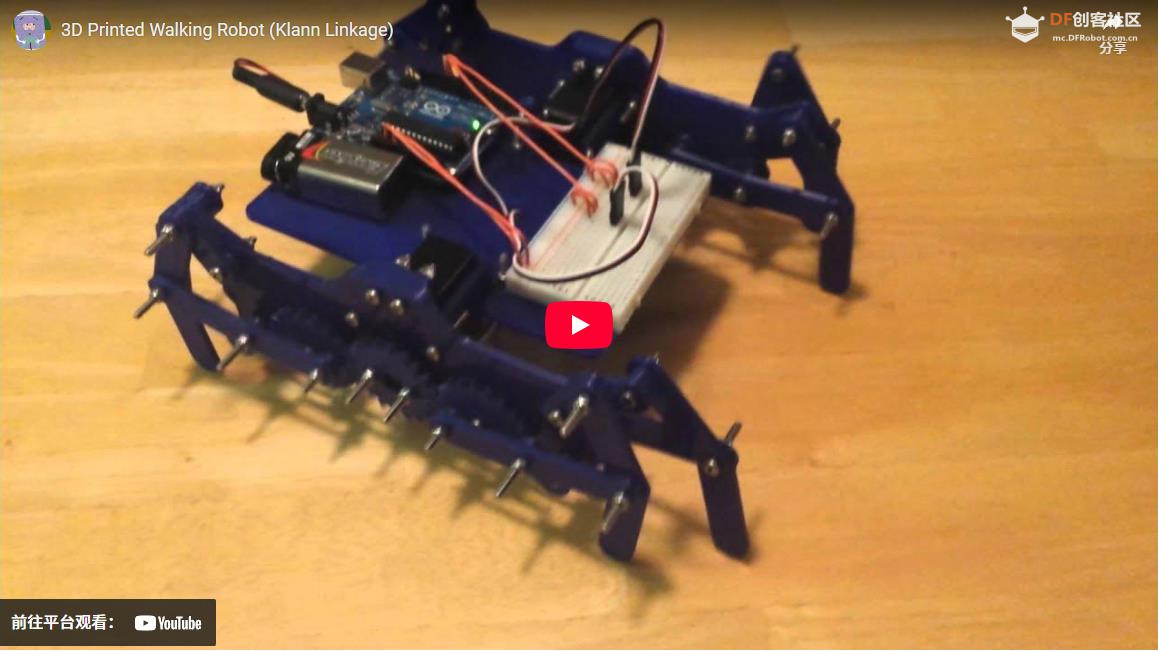 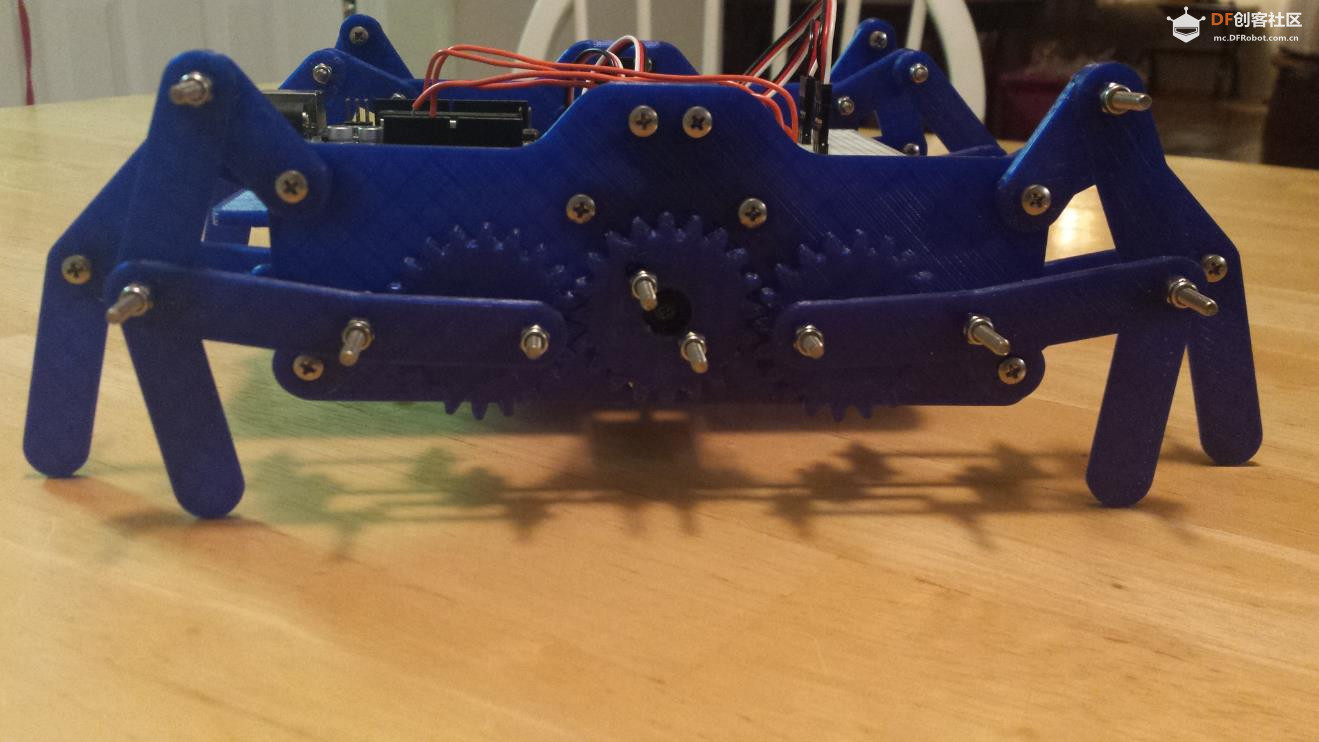 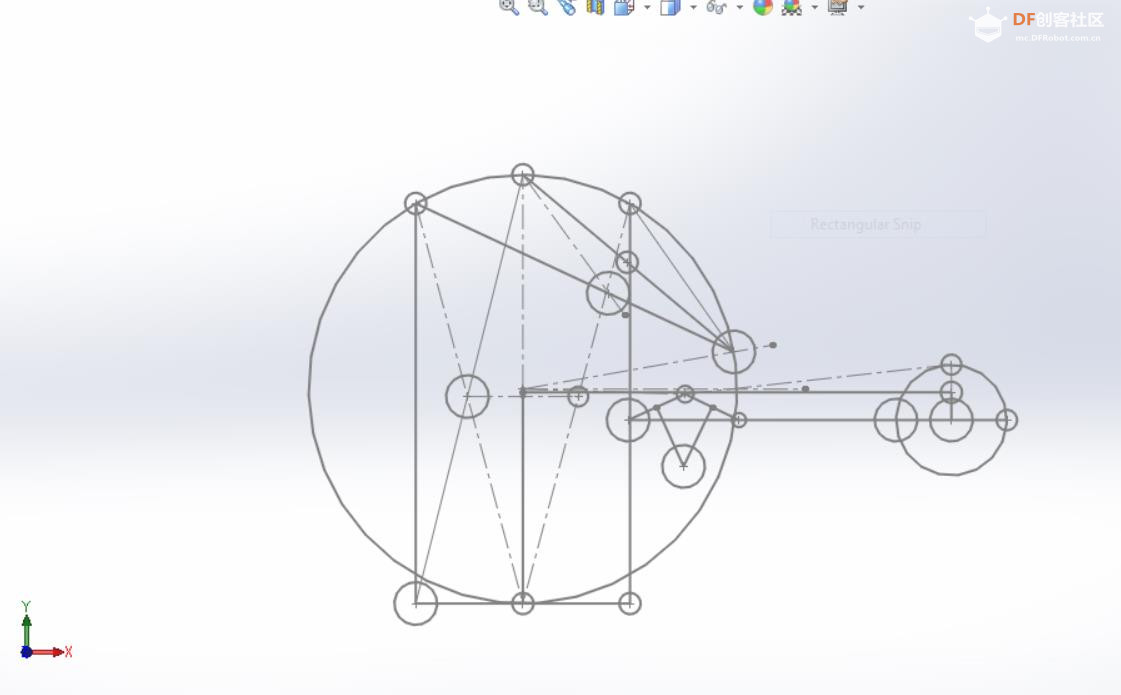 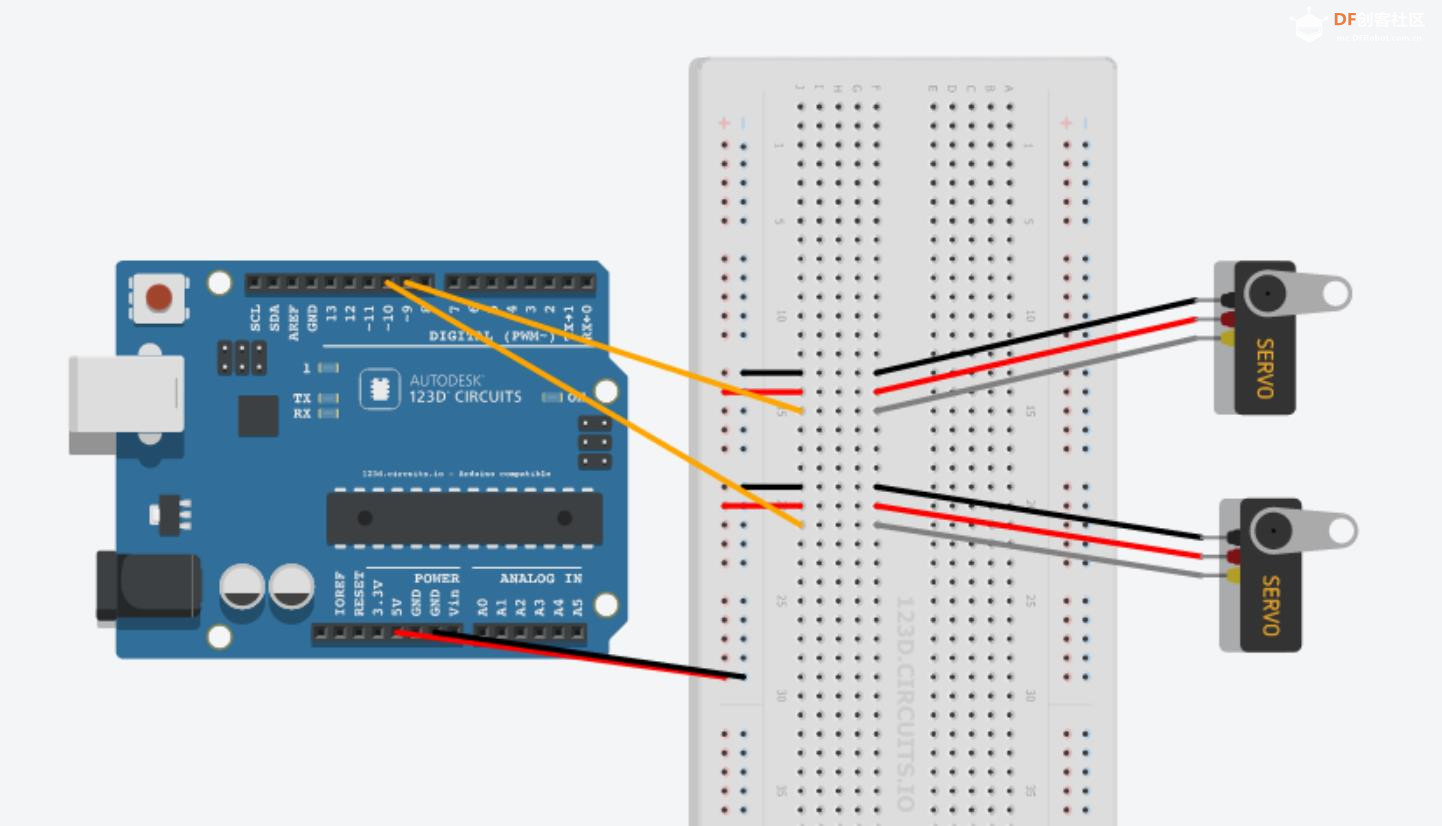 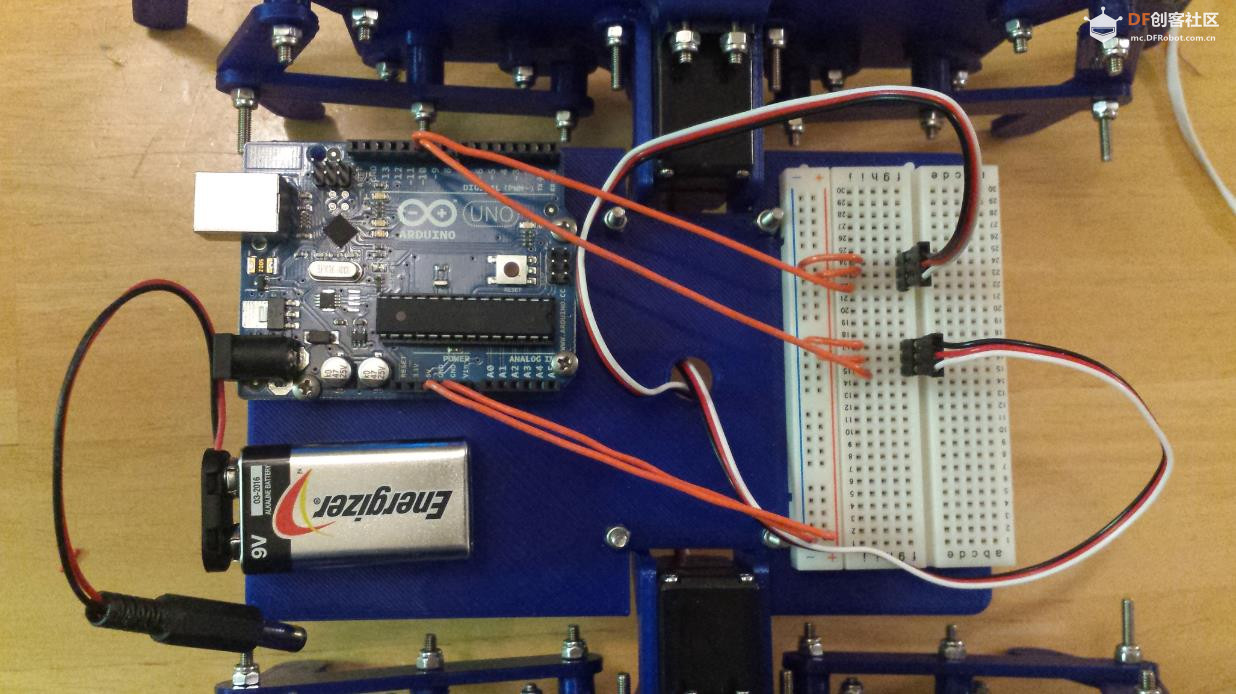 |
项目代码 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶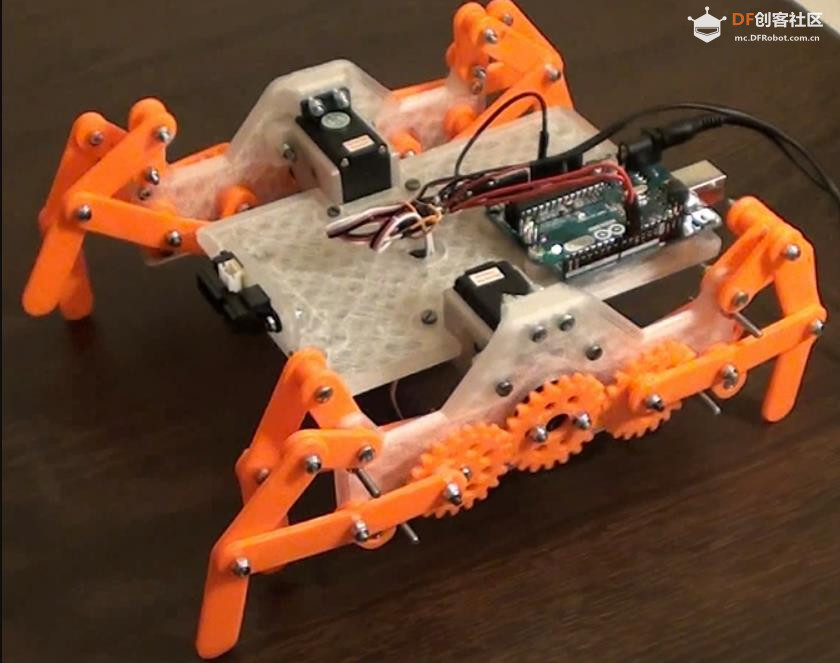

 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






