|
1800| 2
|
[项目] 【Arduino 动手做】Arduino TMC2209的方向和步进控制 |
|
这种简单且经济实惠的设置,使用 Arduino UNO 和 TMC2209 步进驱动器,让您只需三个数字引脚即可控制步进电机。没有 UART,没有复杂性,只有干净的运动控制。这个 DIY 电子项目非常适合初学者,因为设置时间不到 45 分钟,费用约为 10-15 美元。 为什么要将TMC2209与Arduino一起使用? 与 A4988 或 DRV8825 等基本驱动程序相比,TMC2209 安静且效率更高。对于噪音和精度真正重要的项目来说,它是首选。即使没有 UART 配置,它也可以仅使用 STEP、DIR 和 EN 引脚即可完美工作。 主要特点 • 它提供高达 1/256 微步的精确控制 • 使用 StealthChop 模式进行安静运动 • 基本 3 引脚设置:STEP、DIR 和 EN(无需 UART) • 为未来的升级提供可扩展性,例如无传感器归位 (StallGuard) • 与流行的 NEMA 17 步进电机兼容 • 速度和方向都可以轻松定制 工作 该项目使用三个 Arduino 数字引脚: • D8 表示 EN(启用) • D9 用于 STEP(脉冲输入) • D10 用于 DIR(方向控制) 电机沿一个方向旋转,然后反转,重复循环。 电路连接 • EN → D8 - 启用或禁用驱动程序(LOW 表示启用) • 步骤 → D9 - 在上升沿发送步进信号 • DIR → D10 - 设置电机方向(高/低) • VIO → 5V - 驱动器的逻辑电源输入(与 Arduino 的 5V 信号匹配) • GND → GND - 公共接地 • VM/VS → 12V-24V 外部电源 - 电机电源输入 提示:确保所有接地(Arduino、驱动器、电机电源)连接在一起。这有助于避免不稳定的行为。 实际用途 3D 打印机 - 精确、安静地控制挤出机或轴 摄像机滑块 - 平滑的电影级平移 机器人技术 - 允许精确的关节运动或轮子旋转 数控机床 - 可重复运动,控制简洁 自动化系统 - 传送带、分拣机和拾取和放置 升级想法 想更进一步吗?尝试: UART 模式 - 激活动态电流控制或诊断 添加 StallGuard - 用于无传感器归位,无需限位开关 速度控制 - 使用电位器控制电机速度 按钮输入 - 使用按钮手动控制方向 高级模式 - 在 StealthChop 和 SpreadCycle 之间交替进行性能调整   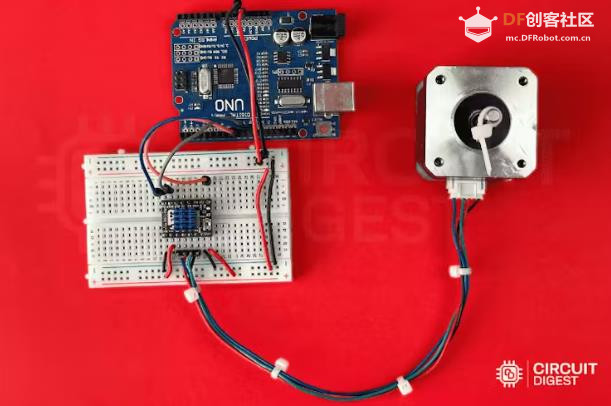 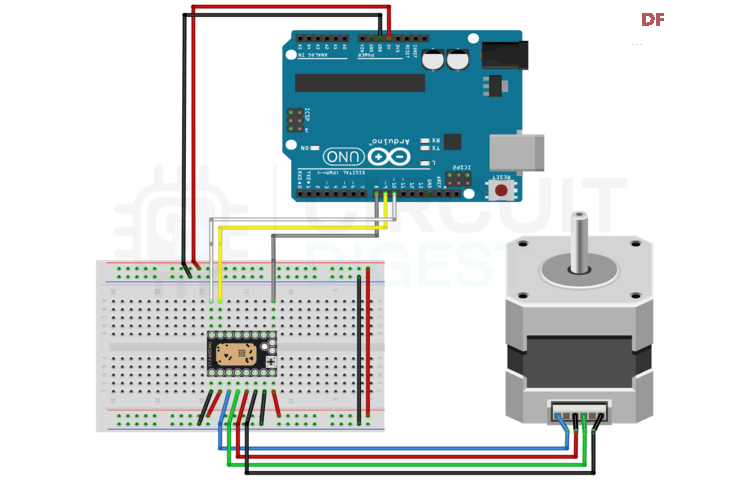 |
项目代码 |
|
【Arduino 动手做】连接和编程驱动器以实现基本方向和步进控制 项目链接:https://www.hackster.io/ElectroS ... mplete-guide-31e07e 项目作者:Electroscope 项目代码: https://github.com/Circuit-Diges ... Driver-with-Arduino https://github.com/Circuit-Diges ... in/tmc2209_code.ino  |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






